單艦雙聲吶對魚雷交叉定位誤差分析
2023-06-26 11:29:10肖明愷
數字海洋與水下攻防 2023年3期
關鍵詞:測量
肖明愷,張 虹
(中國人民解放軍91439 部隊,遼寧 大連 116041)
0 引言
水面艦艇的魚雷防御系統能否有效發揮作戰能力,必須依賴于可靠的魚雷報警信息。在魚雷預警系統中,盡管對目標的檢測、分類和定位都提出了技戰術要求,但是目前大中型水面艦艇裝備的魚雷報警聲吶僅有被動工作方式,僅能探測到來襲魚雷的方位信息而無法獲取其位置信息[1],進而無法更為有效地指導對抗器材實施。如果沒有相當精度的魚雷目標距離、位置、狀態信息作參照,各型對抗器材都難以完全發揮作用[2]。因此,可通過多聲吶系統對魚雷目標進行聯合探測和定位,構建全方位、多層次的魚雷防御系統,準確獲取來襲魚雷的距離、位置、狀態信息,這是提高現有反魚雷裝備器材對抗能力的有效途徑[3-5]。
目前,水面艦編隊常采用對空隊形,間距一般大于30 鏈,而國內預警探測聲吶對于魚雷目標的探測距離有限,多艘艦艇同時探測到魚雷信號的可能性較低,所以在防御來襲魚雷過程中,大多數情況下仍需依靠單艦對魚雷進行探測定位。隨著聲吶系統性能提升,艦殼和拖曳式聲吶也可以在較遠距離上探測到來襲魚雷方位信息。其中,艦殼聲吶一般為由多個水聽器組成的大孔徑球形或者柱形基陣,拖曳式聲吶一般為由多個水聽器組成的線列陣,2 種聲吶均具有接近全向的噪聲信號被動偵測能力。因此,利用單艦艦殼聲吶與拖曳式聲吶獲取魚雷的方位信息,對來襲魚雷進行遠距離的聯合探測和定位,能夠快速地獲取來襲魚雷的位置信息,有望大大提高水面艦艇對抗來襲魚雷的效果。
文獻[6]–[7]中對T-R 型雙基地聲吶系統(T 為發射站,R 為接收站)定位算法精度進行了研究,即通過發射站發出聲波經目標散射后到達接收站得到聲傳播時長,融合方位信息進而確定目標位置,而對于魚雷這類高速運動目標來說,雙程的聲傳播導致路徑變長、聲吶發射站無法長時間不間斷工作等因素限制了系統探測魚雷這種突發性且定位實時性要求高的目標。國內也有學者對雙基地被動聲吶系統對目標定位方法進行了分析,文獻[8]利用最小二乘法對目標被動交叉定位存在的誤差進行處理,但是需要至少3 部以上的聲吶的測量方位信息,這對于實際應用來說難度較大,且在單艦條件下更是無法實現的。文獻[9]基于雙平臺聲吶被動工作方式下對魚雷交叉定位進行了研究,仿真分析了算法對定位誤差的影響因素。本文以單艦雙聲吶被動測向交叉定位技術為基礎,首先考察了常規交叉定位算法對目標定位精度的誤差分布情況,進而提出基于測量方位濾波的交叉定位算法,并建立典型場景下的動態仿真模型,考察了算法在不同定位誤差下的收斂概率。
1 雙聲吶測向交叉定位原理
雙聲吶被動探測目標的原理[9-10]如圖1所示。聲吶與魚雷目標的距離分別為R1、R2,聲吶測量方位角分別為θ1、θ2,2 個聲吶距離為L。
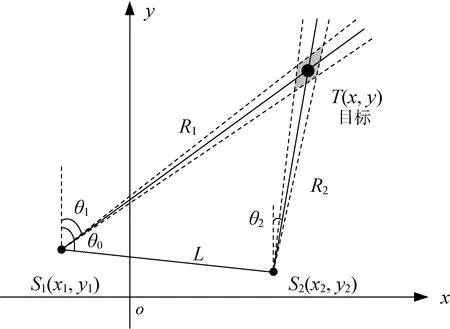
圖1 交叉定位原理圖Fig.1 Schematic diagram of cross-location
根據正弦定理可得
以S1點為基準,可以求得目標點位置坐標為
假設測量方位誤差服從零均值高斯分布,且相互獨立,則目標定位誤差σx和σy分別為
將各變量的一階偏導帶入式(3),可得定位誤差分布情況。根據式(3)可知:定位誤差與聲吶測量方位誤差σθ和基線誤差σL有關。本文就以上2 類誤差對定位誤差的影響進行仿真分析。
2 靜態定位誤差分析
2.1 測量方位誤差對定位誤差影響分析
首先,僅考慮聲吶測量方位誤差對定位誤差的影響。仿真參數設置:2 部聲吶分別位于S1(–L/2,0)和S2(L/2,0)。其中,基線長度為2 部聲吶的聲學中心的距離,當前主戰水面艦艇長度約為100~200 m,拖曳式聲吶纜長的設置主要與所在海域水深以及探測目標深度有關,一般約為 400~800 m,因此本文分別設置L為600 m、800 m、1 000 m。聲吶測量方位誤差σθ1、σθ2均為4°,仿真結果如圖2–4 所示。
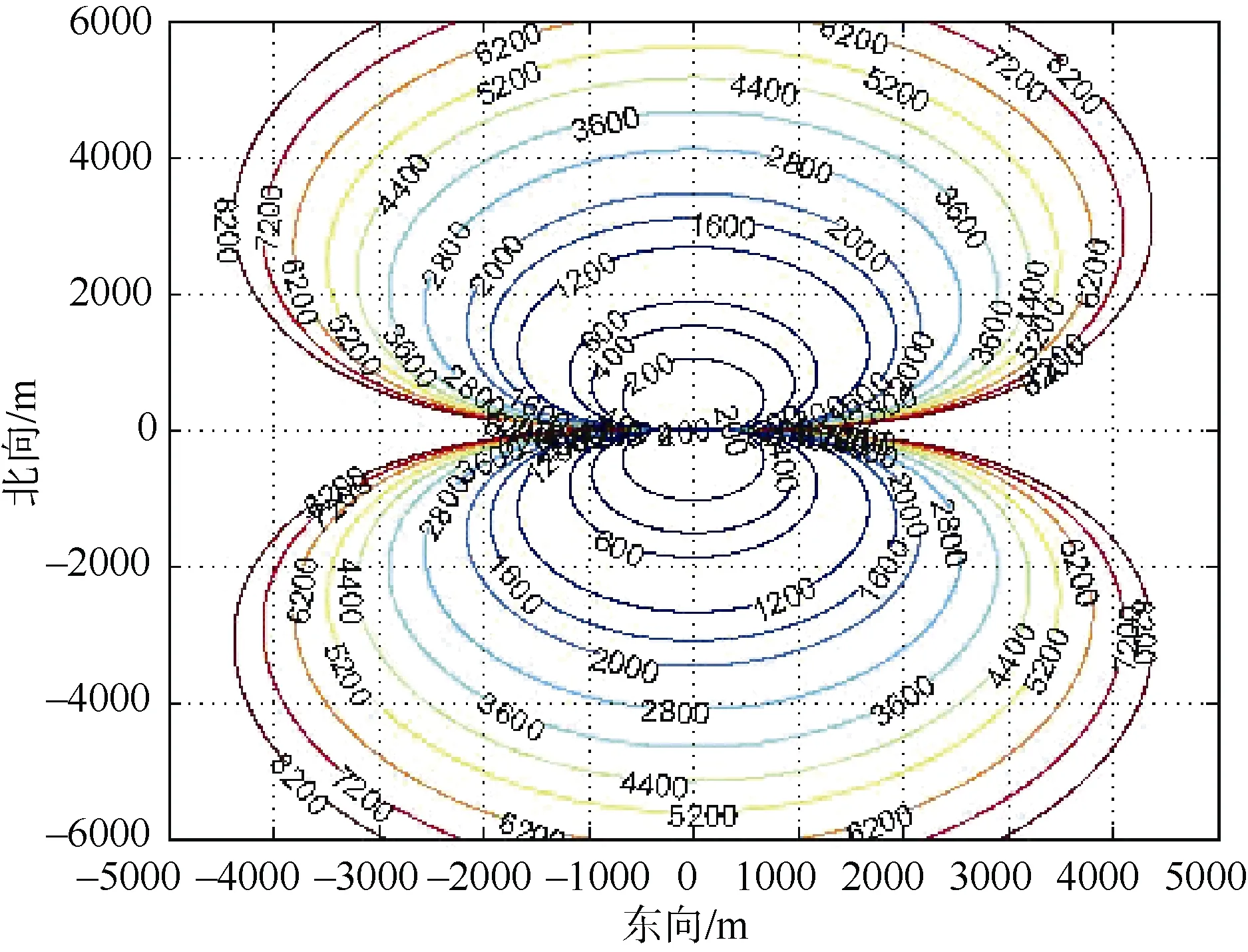
圖2 交叉定位絕對誤差(基線600 m)Fig.2 Absolute error of cross-location(baseline length is 600 m)
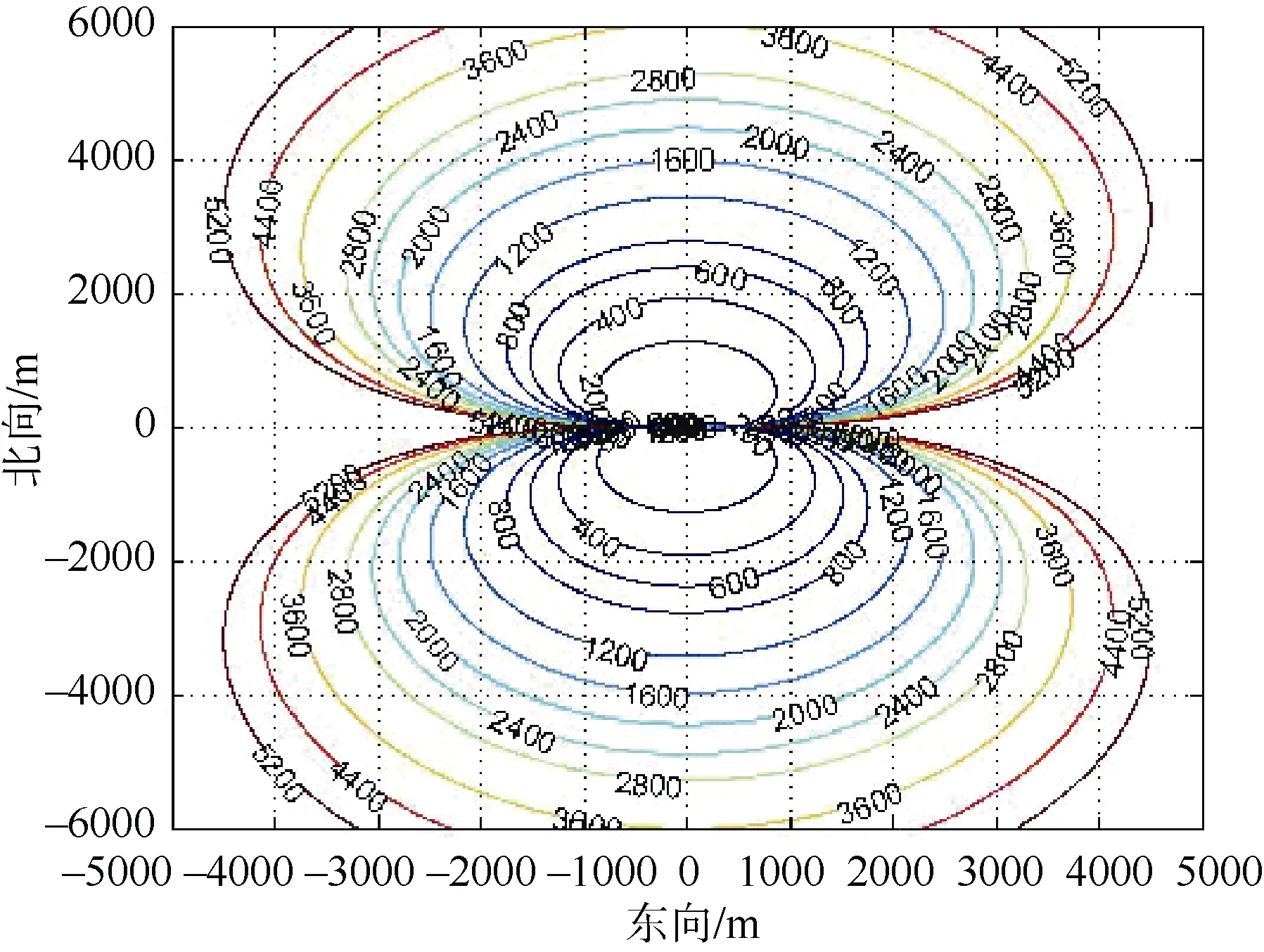
圖4 交叉定位絕對誤差(基線1 000 m)Fig.4 Absolute error of cross-location(baseline length is 1 000 m)
結合靜態誤差分布情況,在不同基線長度下,在距離原點5 km 和2.5 km 這2 個典型的距離上,統計與基線夾角大于30°范圍的誤差分布(一般認為夾角小于30°范圍內為聲吶弱探測區),統計結果見表1。
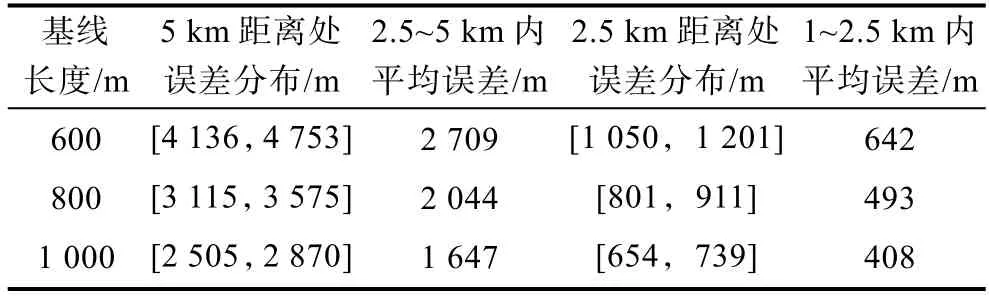
表1 單艦雙聲吶交叉定位在典型距離上的誤差分布Table 1 Error distribution of cross-location of single-vessel dual sonar at typical ranges
2.2 平臺位置誤差對定位誤差影響分析
考慮平臺自身的定位誤差,假設的x1和y1測量誤差為σx1和σy2,則式(3)改寫為
基線長度L設置為1 000 m,聲吶測量方位誤差σθ1、σθ2均為4°。分別考慮σL、σx1和σy1的影響。首先僅考慮σL的影響,假設σL=50 m,得到的仿真結果如圖5所示。
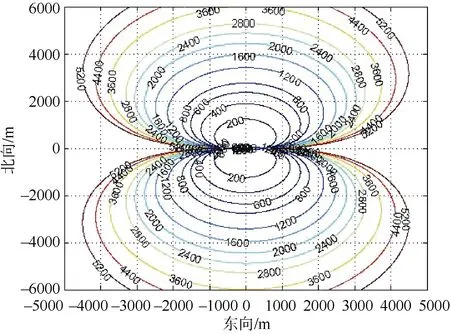
圖5 交叉定位絕對誤差(考慮基線誤差)Fig.5 Absolute error of cross-location(considering baseline error)
再考慮平臺自身定位誤差的影響,假設σx1=σy1=50 m,得到的仿真結果如圖6所示。
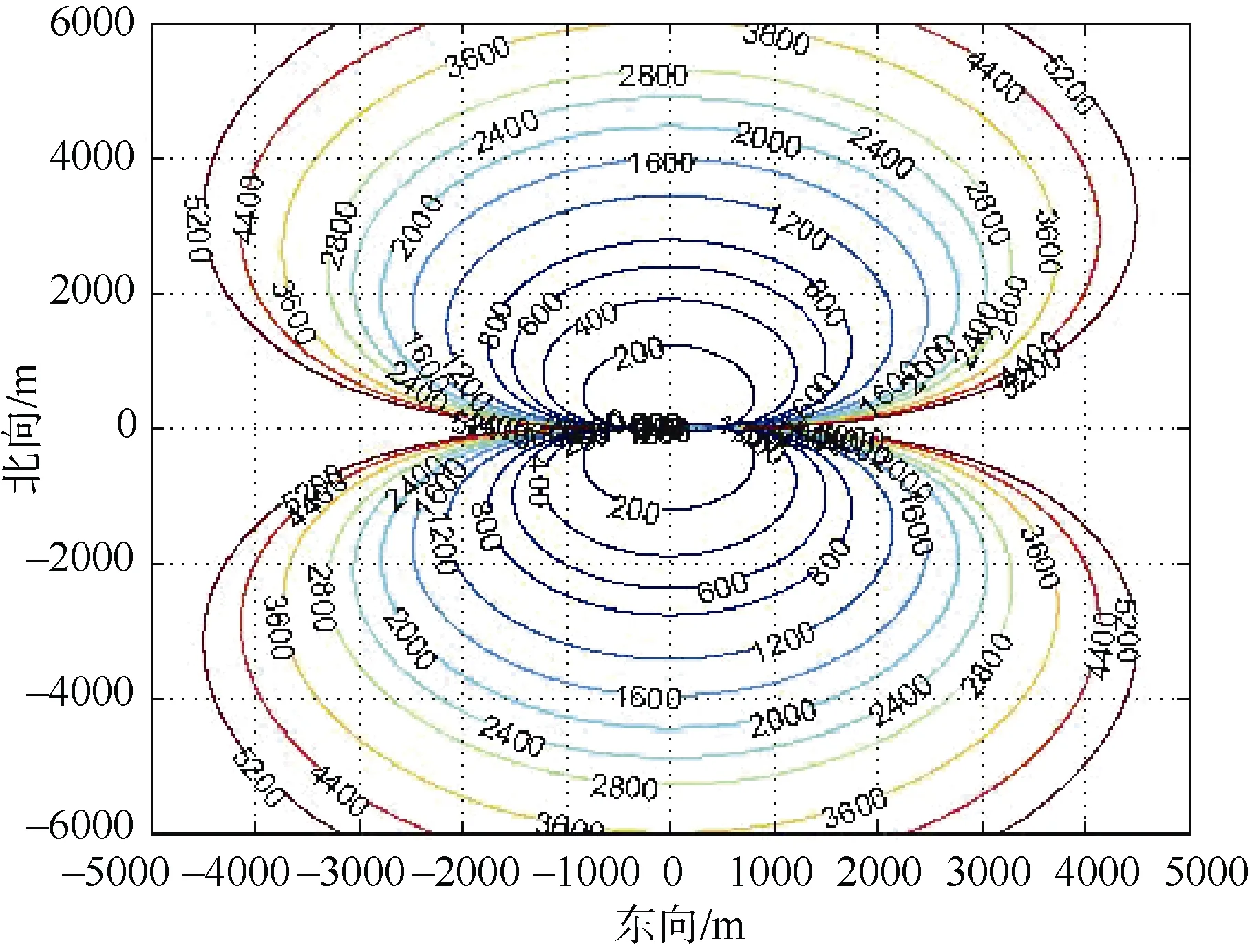
圖6 交叉定位絕對誤差(考慮平臺誤差)Fig.6 Absolute error of cross-location(considering platform error)
2.3 小結
從圖2–6 中可以看出,目標定位誤差主要來自于測量方位誤差,而基線誤差和平臺位置誤差對定位誤差的影響相對較小,基本不影響定位誤差數值和定位誤差分布規律。另外,基線長度越長,定位誤差越小。因此,在固定基線長度的條件下,應重點優化測量方位誤差,以提高定位精度。
聲吶方位測量值的誤差是隨時間平穩變化的,雖然測角誤差較大,但方位測量值隨時間的變化趨勢以及方位測量誤差隨時間變化的統計平穩性都是有規律可循的,因此對其數據處理時會更為有效;而如果考慮直接優化交叉定位解算之后的定位結果,則會面臨定位誤差隨距離變化導致定位誤差非高斯平穩的問題(定位誤差大小正相關于距離值);而使用非線性濾波算法直接通過角度信息解算位置信息,不僅存在定位誤差非平穩的問題,還存在非線性解算引入的誤差,即使耗費較大的計算量,也難以取得良好的效果。
3 遞推平均濾波
遞推平均濾波也被稱為移動平均濾波或線性平滑濾波,其原理是通過設定一個固定窗長(通常為奇數)的移動濾波窗口,計算該窗口內的數據均值。由于交叉定位誤差主要來自于測量方位誤差,而測量方位信息是一個相對緩慢變化的量,且不存在較多或連續的突變或野值,因此該方法能有效地消除測量方位信息中的隨機波動,具有較高的適用性。遞推平均濾波算法計算量小,只需要根據設定的窗長將歷史觀測數據逐項移動,便可依次計算序列均值,從而用來反映數據長期的變化趨勢,同時也具有很好的實時性。
假設輸入序列為s(t),t=1,2,…,N,濾波窗長為M,則濾波后輸出序列為
由式(5)可知,遞推平均濾波器的窗長越長,則選取的數據越多,數據平滑的效果越好。但是,窗長的選擇不宜過長,加大窗長會使估計值過多依賴于歷史數據,導致其對實時觀測數據的變化更不敏感。為解決此問題,改進選用加權遞推濾波算法,即對M個觀測數據分別設定權值求得輸出,即越靠近當前觀測數據設定的權值越高:
將測量方位進行濾波后,再進行交叉定位即可得到目標位置信息。
4 典型動態場景仿真及誤差分析
為了進一步分析定位精度的影響規律,同時考察基于測量方位濾波的交叉定位算法的收斂概率,建立動態仿真場景。一般情況下,為保持拖曳式聲吶在水中良好姿態同時減小噪聲干擾以達到良好探測效果,水面艦保持航行速度為8~12 kn。本文重點研究魚雷直航段,假設魚雷來襲為勻速直線運動模型,建立以下2 種動態仿真場景。
場景1:設2 個聲吶初始位置為S1(–300,0)和S2(300,0),水面艦以10 kn 的速度自西向東航行,聲吶測量方位誤差均為4°;魚雷設定9 種典型航跡,航跡的起點距離原點5.5 km,終點距離原點1 km,航速50 kn,方位(魚雷與基線法線順時針方向的夾角)分別為300°、315°、330°、345°、0°、15°、30°、45°、60°,如圖7所示。
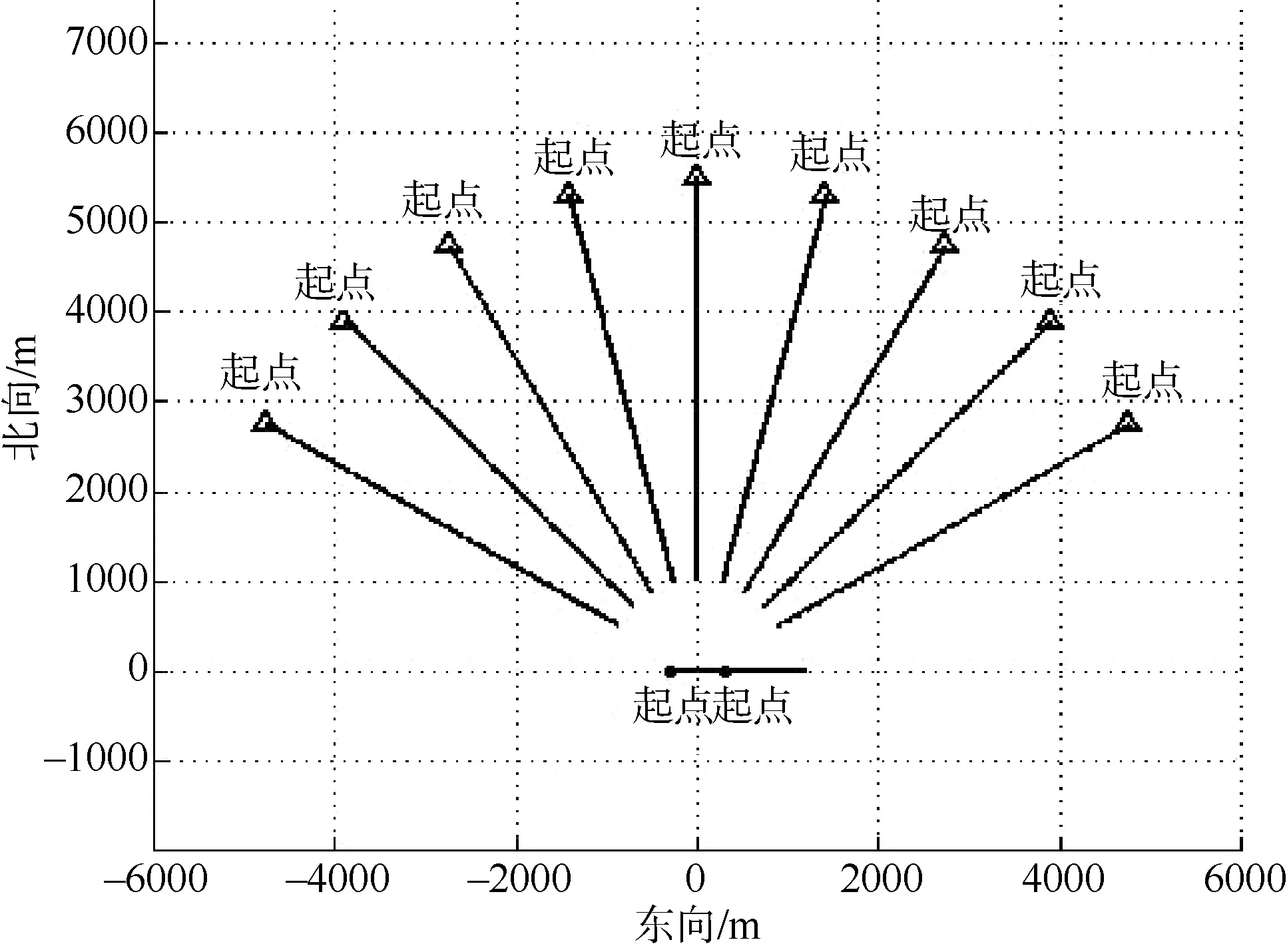
圖7 動態場景下的典型航跡設置Fig.7 Typical track settings in dynamic scenes
場景2:2 個聲吶初始位置坐標設定為S1(–400,0)和S2(400,0),其它參數均相同。
為了分析隨機誤差對定位精度的影響,對聲吶測得的魚雷方位信息添加噪聲(高斯白噪聲),以表示系統觀測時具有的隨機誤差。由于噪聲的隨機性,單次仿真的結果不足以證明算法的真實性能。在同樣的條件下,本文進行1 000 次蒙特卡洛仿真試驗,統計2 種場景下算法的誤差分布情況得到圖8和圖9。
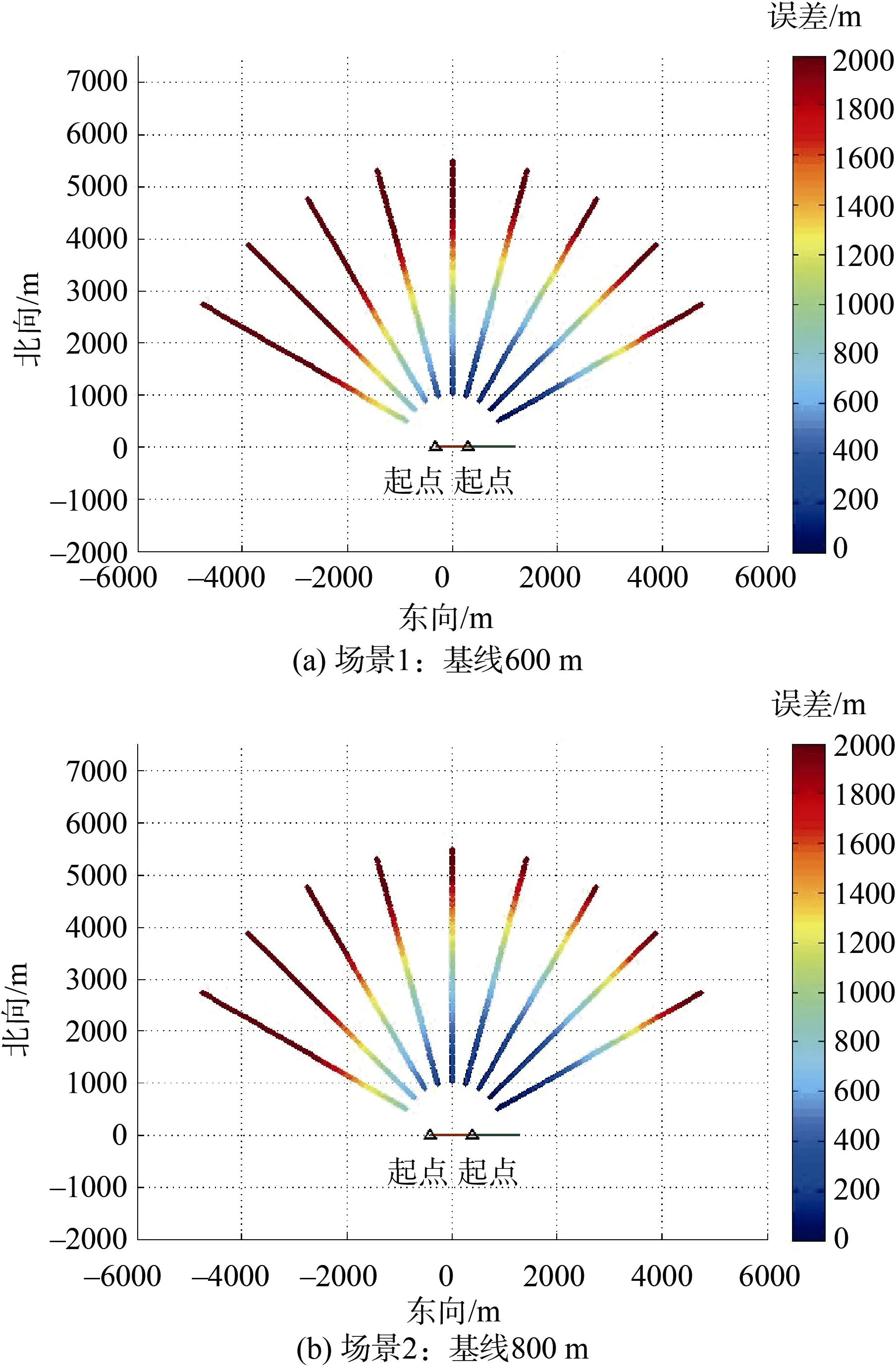
圖8 常規交叉定位算法定位誤差Fig.8 Positioning error of conventional cross-location algorithm
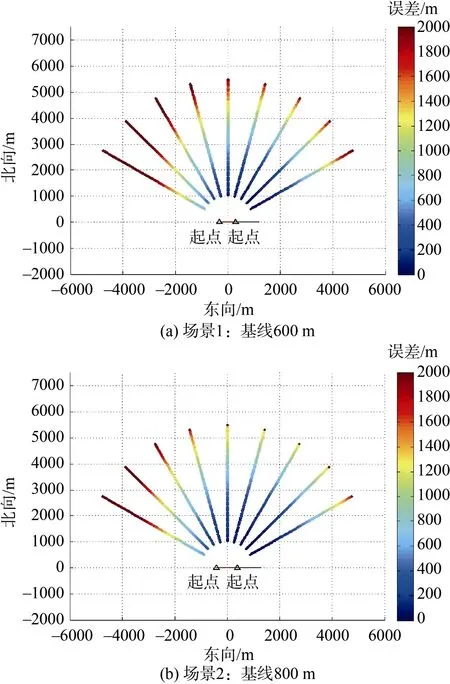
圖9 測量方位濾波的交叉定位算法定位誤差Fig.9 Positioning error of cross-location algorithm for measuring azimuth filtering
使用圓概率誤差描述定位算法在各點的定位精度,即取N次蒙特卡洛試驗中定位誤差的中位數,用于評價在該點的定位精度[11]。本文在上述仿真場景的基礎上,將目標的來襲方向設置為每間隔1°變化1 次,對與基線法線夾角–60°~60°范圍內的所有角度都進行1 000 次蒙特卡洛試驗,統計算法在不同距離區域內不同定位誤差下的收斂概率,統計如表2–3 所示。
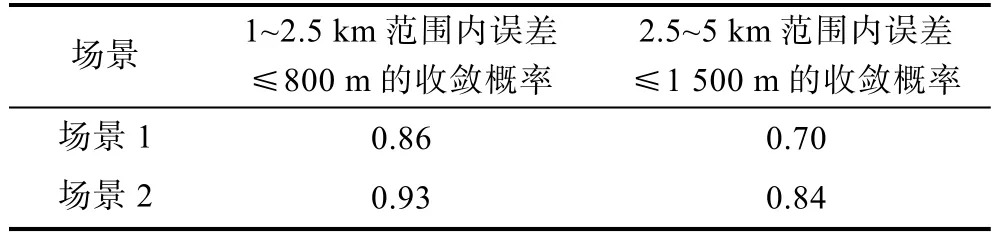
表3 測量方位濾波的交叉定位算法誤差收斂概率Table 3 Error convergence probability of cross-location algorithm for measuring azimuth filtering
從上述仿真結果中可以看出,測量方位濾波的交叉定位算法明顯優于常規交叉定位算法。
5 結束語
本文以雙聲吶站交叉測向定位原理為基礎,仿真分析在典型測量誤差下,魚雷目標定位誤差空間分布情況,結果表明:交叉定位算法的定位誤差在固定基線條件下主要受測量方位誤差影響。基于此,提出了對測量方位濾波的交叉定位算法,建立了動態仿真模型考察算法性能,結果表明:該算法具有更高的定位精度和收斂概率。該研究結論可為利用單艦雙聲吶系統進行魚雷目標交叉定位提供依據。
猜你喜歡
小學科學(學生版)(2021年5期)2021-07-22 02:40:06
中學生數理化·八年級物理人教版(2019年9期)2019-11-25 07:33:02
中學生數理化·八年級物理人教版(2019年3期)2019-04-25 06:20:54
中學生數理化·八年級物理人教版(2018年3期)2018-05-31 08:52:45
數學小靈通(1-2年級)(2017年10期)2017-11-08 08:39:45
軍事文摘·科學少年(2017年4期)2017-06-20 23:25:16
軍事文摘·科學少年(2017年2期)2017-04-26 21:58:43
中學生數理化·八年級物理人教版(2016年3期)2016-04-07 04:49:32
少兒科學周刊·兒童版(2016年1期)2016-03-14 03:52:21
閱讀與作文(小學低年級版)(2015年4期)2015-04-29 00:00:00
