反魚雷魚雷武器發展現狀及作戰使用研究
2023-06-26 11:29:12程文鑫張華纓
數字海洋與水下攻防 2023年3期
關鍵詞:系統
程文鑫,任 斌,柳 海,張華纓
(1.海裝裝備項目管理中心,北京 100036;2.中國船舶集團有限公司系統工程研究院,北京 100094)
0 引言
魚雷自誕生以來就是水面艦艇的主要威脅之一[1]。據統計,第一次世界大戰中,共發射了約1 500條魚雷;所有受到攻擊而沉沒的軍艦中,約有1/3是被魚雷擊沉的。到了第二次世界大戰,發射的魚雷猛增到30 000 條以上,被魚雷擊沉的軍艦約占總數的1/2[2]。受水文環境等多種因素的影響,艦艇對水下威脅目標的探測存在諸多不確定性,同時由于現代魚雷具有毀傷威力大、攻擊距離遠、對抗識別能力強、攻擊隱蔽性好等特點,水面艦艇的生存能力受到了極大的挑戰[3],這就迫使水面艦艇建立魚雷防御體系,形成有效的魚雷防御能力[4]。
反魚雷魚雷(ATT)作為一種可對來襲魚雷進行精確攔截的硬毀傷的防御手段,具有自主作戰能力強、作戰效能高等特點[5],成為世界主要軍事強國重點研發的新型魚雷防御武器[6]。文章在綜述ATT 武器發展歷史和研究現狀的基礎上,開展ATT武器使用研究,為我國發展ATT 武器提供一定技術支撐。
1 魚雷導引方式及特點
從導引方式方面看,魚雷一般可分為直航魚雷、聲自導魚雷、尾流自導魚雷。線導方式是發射平臺火控系統對魚雷進行控制的一種途徑,通常它與魚雷的一種或幾種自導方式聯合使用[7]。
1.1 直航
早期的魚雷是無自導的近程直航魚雷,單雷命中概率較低。直航魚雷具有成本低、航速不受限制、抗干擾能力強等優點。雖然直航雷的使用越來越少,但配備了先進火控系統的發射平臺,直航雷仍在使用。在英阿馬島戰爭中,雙方共動用了6 型魚雷,進行了11 次魚雷攻擊,線導、聲自導魚雷均未奏效,唯一建功的是英國在二戰中剩余的MK-8型直航魚雷。
1.2 聲自導
聲自導即利用水聲信號進行目標檢測、識別、定位,是當前最為常見的魚雷自導方式,分為主動聲自導和被動聲自導2 種方式。主動聲自導由魚雷發射聲脈沖信號,自導系統接收目標回波,計算目標方位距離。被動聲自導系統接收目標的輻射噪聲,由此測算目標方位,其優點是信號連續性強,缺點是無法獲得目標距離信息,而且容易被寬帶噪聲干擾器干擾。
海洋環境噪聲、人工干擾噪聲、魚雷自噪聲以及混響等因素是影響聲自導魚雷對目標檢測和識別能力的重要因素。另外,對于種類繁多的水聲對抗器材,如何采取有效的反對抗措施,也是聲自導魚雷必須解決的關鍵問題。
1.3 尾流自導
尾流自導魚雷一般只用于攻擊水面艦船。艦船航行中會在尾部形成含有氣泡和渦的尾流,其溫度、電導率、磁場等參數都與其他區域海水不同[8]。利用這種差異形成多種尾流自導方式,如磁尾流自導魚雷、聲尾流自導魚雷等。目前,尾流自導魚雷主要采用聲尾流自導方式。
尾流自導有抗干擾能力強的特點。利用向上觀察的換能器,可在很大程度上克服魚雷的自噪聲影響,并且尾流難以偽造產生,使得現有的軟對抗手段對尾流自導魚雷幾乎無能為力。而尾流自導魚雷又是從艦船尾部進行跟蹤,處于聲吶盲區之內,并且尾流消失需要較長一段時間,因此水面艦船對尾流自導魚雷實施對抗和規避難度較大。
當前各國的尾流自導魚雷有如德國DM2A4、法國的Fl7-MK2 型、意大利的A184、俄羅斯的53-65K 等[9]。
1.4 線導
絕大多數國家的重型魚雷都裝備了線導系統。線導系統由收發電子裝置、雷上線團、發射艇上放線機構等組成。國外先進魚雷已采用光纖導線,如瑞典的TP2000 魚雷和意大利“黑鯊”魚雷[10]。
線導裝置的使用提高了搜索概率和導引精度,魚雷的運動信息可以通過線導系統回傳到發射平臺以實現對魚雷的監視,當出現導引失誤時,可通過線導進行糾正,提高攻擊的準確性。
2 魚雷防御手段
水面艦艇主動對抗魚雷攻擊存在軟硬2 種手段。軟對抗并不直接摧毀來襲魚雷,而是使用氣幕彈、干擾器等器材干擾自導系統,使其無法檢測到真實目標;或者施放各種假目標來誘騙魚雷,使魚雷錯誤地跟蹤假目標而耗盡能源。軟對抗的優點是防御快速、成本較低。目前各國海軍依然把軟對抗器材作為反魚雷系統中的主要對抗手段[11]。
隨著多目標處理等聲自導對抗識別技術的發展,魚雷的反對抗能力不斷提高,軟對抗器材對抗現代智能魚雷的效果越來越差[12]。對抗器材雖然在一定距離和時間上可以誘騙來襲魚雷,但不能徹底消除威脅,存在被來襲魚雷二次攻擊的可能。與此同時,軟對抗措施并不能對抗一些類型的魚雷,如直航雷,而聲干擾器和聲誘餌等軟對抗器材雖然能對抗聲自導魚雷,卻無法對抗尾流自導魚雷。在無法確定來襲魚雷制導方式的情況下,為了提高魚雷防御成功率,硬殺傷手段成為重要選擇[13]。
硬殺傷對抗手段旨在直接摧毀來襲魚雷[14],主要包括火箭深彈、爆炸式聲誘餌、ATT 等。典型的硬殺傷性武器及其特點如表1所示。需要指出的是,來襲魚雷攻擊方式較多,水面艦艇不能采用單一方式對抗措施防御魚雷攻擊。另外,如艦艇被多枚魚雷同時攻擊,艦艇的防御難度將大大提高[15]。
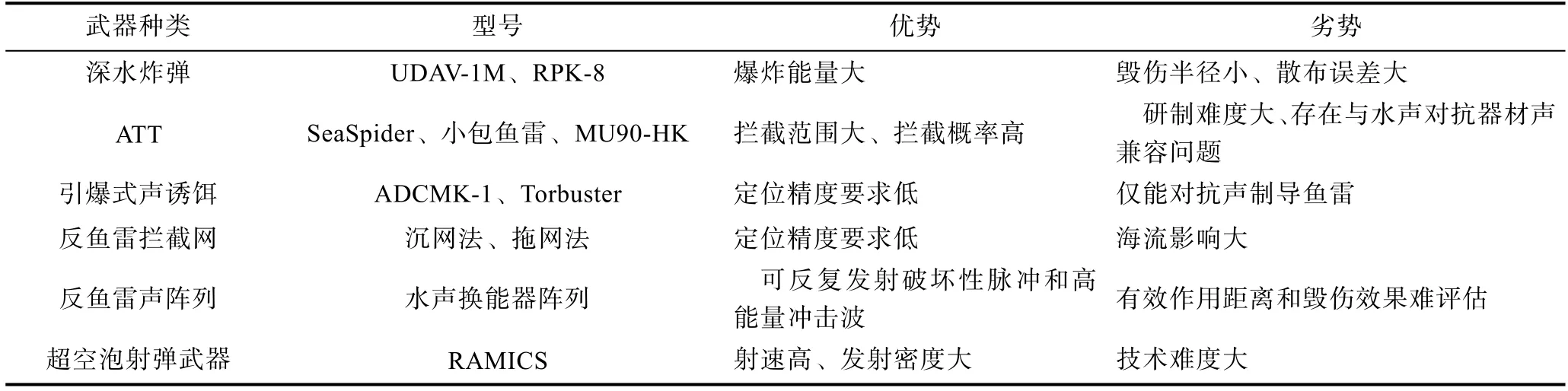
表1 典型硬殺傷性武器Table 1 Typical hard-kill weapons
在硬殺傷武器中,ATT 具有主動搜索和精確制導的特點,能夠攔截多類型來襲魚雷。同時相比于攔截網、深彈等“硬殺傷”武器,高毀傷概率使其成為各軍事強國研究的重點[16]。
3 各國ATT 發展現狀
國外發展ATT 有3 個主要的時間點[17],第1個時間點是1980年代,美國首先提出了ATT 的研制和探索,在MK46 型魚雷的基礎上進行了改進,但由于未能通過海軍試驗,于1995年結束。第2個時間點為2000年前后,以MU90-HK 項目為代表[18],該項目由法國和意大利聯合完成,是對MU90 輕型魚雷的一種改進,并進行了初步的數字模擬論證,但由于技術風險較大,該方案未被接受。在這一時期,開始了智能反魚雷的發展,美國在賓夕法尼亞大學應用物理實驗室進行了試驗,但其進展并未公開。第3 個時間點始于2019年,以德國研制的“海蜘蛛”和俄羅斯的E/NK 系統為代表。“海蜘蛛”ATT 目前處于樣雷研制階段,完成了湖上動態航行報警和試驗系統對照實驗。E/NK 系統的“小包”ATT 經過試驗階段,已裝備部隊。
1)美國。
美國是最早提出ATT 研發概念的國家[19],最初的ATT 項目基于MK-27 輕型魚雷進行改造。
1987年研制出了第1 枚ATT,其射程1 km、直徑203 mm,可裝藥7 kg,速度40 kn,采用組合制導模式。同一時期,美國相關研究人員將MK-46輕型反潛魚雷改裝為ATT,但速度較慢、攔截時間短,最終以失敗告終。
20世紀90年代初,研制出了一種新型的ATT,主要部件為MK-54 魚雷,其動力裝置為化學儲能推進系統。
2013年5月,美海軍“布什”號航空母艦進行了第1 次試驗,受試對象包括魚雷警報系統以及以ATT 為中心的反魚雷對抗單元,試驗中7 個魚雷水下靶子均被擊毀。
2019年8月,美國“艾森豪威爾”號驅逐艦在大西洋試驗發射了1 枚ATT,主要對抗尾流自導魚雷以及導線自導魚雷。經過多次演習,ATT 始終達不到實際環境下作戰要求,被暫停使用。美國海軍表示,ATT 系統研制和使用仍處于起步階段[20]。

圖1 “艾森豪威爾”航母試射ATTFig.1 ATT launched from Eisenhower aircraft carrier
2)法國與意大利。
法國與意大利歐洲魚雷公司合作共同研發MU90HK,該型ATT 基于MU90 輕型反潛魚雷進行研制,其最小發射深度25 m、長3 m、直徑324 mm、重300 kg,戰斗部由50 kg 的半聚能炸藥組成,速度可達到50 kn 以上,具備100°/s 的大角度機動能力。MU90 型的特點是精度高、速度快、射程遠,具有高精度的聲探測系統[21]。此外,MU90HK 可同時發射,在遠離本艦60~100 m 后開啟保險,以保證發射船的安全,并具備識別友軍的能力。
歐洲魚雷公司在2年中進行了超過百萬次的仿真實驗,結果表明:MU90HK 能夠有效地攔截重型魚雷,其中尾流和直射魚雷的攔截概率則分別為77%和85%。
3)德國。
德國研制的ATT 名為“海蜘蛛”[22],如圖2所示。“海蜘蛛”體積小巧、裝載量大,對抗效果好,可以替代輕型魚雷攻擊潛艇,其劣勢是航程短,定位準確度不高。
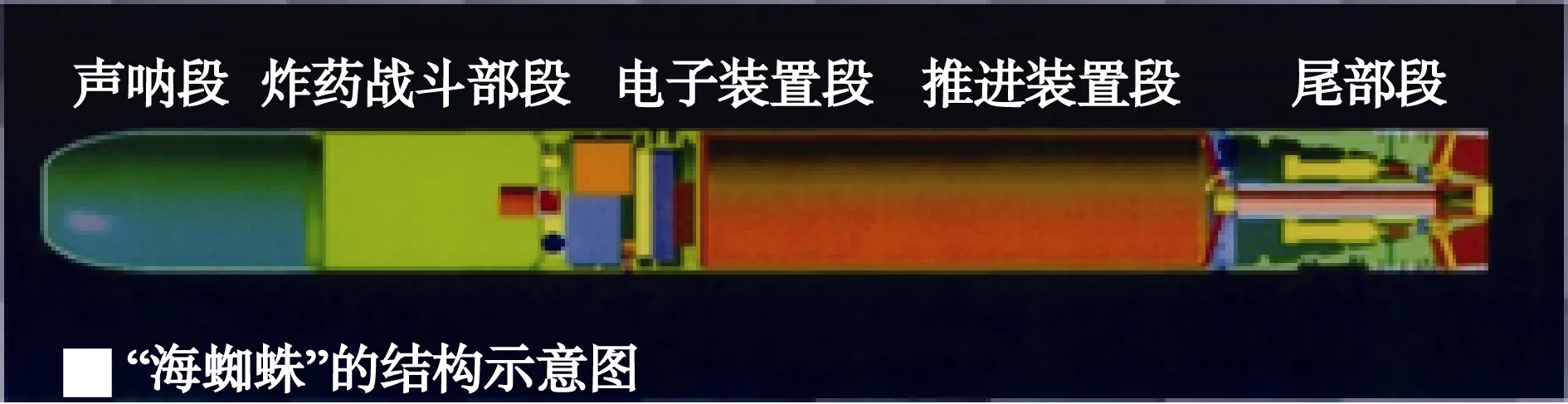
圖2 “海蜘蛛”結構示意圖Fig.2 Schematic diagram of structure of SeaSpider
“海蜘蛛”是為德國212A 設計的,其用途不僅僅是潛艇,也可用于水面艦艇。“海蜘蛛”的發射分為2 種,即魚雷管和專用的外置式發射箱。
圖3所示為水面艦發射“海蜘蛛”的示意圖。利用火箭推進器將魚雷推送到目的地,推進器在空中脫離,脫離時降落傘打開以降低下落速度。入水后脫離降落傘,隨后起動發動機,采用聲吶來搜尋并襲擊來襲魚雷。

圖3 水面艦發射“海蜘蛛”Fig.3 Surface ship launches SeaSpider
4)俄羅斯。
俄羅斯E/NK 系統是俄國海軍裝備的一種反魚雷武器系統,系統由特殊目標識別聲吶、自動火控系統、ATT、儲存和運輸發射裝置組成。其目標識別聲吶可對目標進行自動識別、解算出目標運動要素后自動傳輸至火控系統中進行射擊諸元解算,實現自動發射功能。同時,該系統還具有對全系統技術狀態的實時監測、顯示、記錄等功能。俄羅斯稱“小包”ATT 系統能將戰艦的生存能力提升至3~3.5倍[23]。“小包”ATT 系統如圖4所示。

圖4 俄羅斯E/NK 系統Fig.4 Russian E/NK system
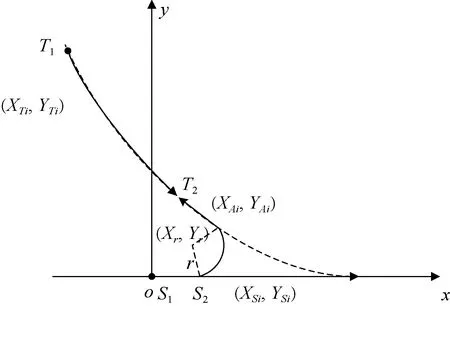
圖5 逆彈道攔截示意圖Fig.5 Schematic diagram of reverse ballistic interception
4 ATT 的作戰使用
來襲魚雷攻擊艦船有多種彈道,ATT 的彈道選擇會直接影響對來襲魚雷的攔截效果[24]。例如,聲自導魚雷在捕獲目標后的尾追彈道、固定提前角彈道、自動調整提前角彈道等。在使用ATT 攔截來襲魚雷時,將來襲魚雷看成目標,ATT 在捕獲來襲魚雷后同樣按照既定的特定彈道追蹤來襲魚雷。本節將在建立攔截彈道模型的基礎上,通過仿真分析采用不同攔截彈道方式和不同ATT 性能參數條件下的攔截概率。
4.1 逆彈道攔截模型
以發現來襲魚雷時的本艦位置為原點,真北線為y軸建立坐標系。在整個過程中,設模擬來襲魚雷彈道的坐標為(XTi,YTi),本艦的坐標為(XSi,YSi),ATT 的坐標為(XAi,YAi)[25]。
本艦在位置S1時探測到位置T1有來襲魚雷,前進至位置S2時解算出來襲魚雷此時的速度VT與航向HT及初始坐標(XT1,YT1),并模擬出來襲魚雷彈道坐標(XTi,YTi)。對于直航階段:
對于追蹤階段:
此時發射ATT,以半徑r回旋至來襲魚雷的彈道,并逆著彈道前進,最終在位置T2攔截到來襲魚雷[26]。設ATT 的初始坐標為(XA1,YA1),回旋圓心坐標為(Xr,Yr),回旋圓弧與來襲魚雷彈道的切點坐標為(XTm,YTm)。
由幾何關系可建立如下方程:
解算出回旋半徑r便可確定ATT 的彈道,從而對來襲魚雷進行攔截。
4.2 解相遇攔截模型
對于來襲魚雷的模擬彈道計算同式(1)和式(2),可模擬出來襲魚雷的坐標(XTi,YTi),并發射ATT。
與逆彈道攔截方式不同,ATT 發射后以最大回旋角速度進行回旋,在航向對準來襲魚雷后直接射向來襲魚雷進行攔截。設ATT 的最大回旋角速度為ω,航向為HAi,速度為VA。來襲魚雷相對于ATT 的方位角與ATT 的航向夾角為[27]
其中,(XTi,YTi)為發射ATT 時來襲魚雷的模擬坐標。
ATT 的航向為
從而確定ATT 的彈道:
4.3 ATT 攔截來襲魚雷的數值仿真
在數值仿真中,本艦、來襲魚雷和ATT 的參數:①本艦。速度20 kn,航向90°,拖曳聲吶電纜長度1 000 m;拖曳聲吶方位估計的系統誤差均值為3°,估計方位的方差在目標方位角為–60°~60°為1°,其它角度為2°;距離探測誤差為真實距離的2.5%。②來襲魚雷。速度30 kn,相對拖曳聲吶初始距離5 000 m,相對拖曳聲吶的初始方位角為90°,導引方式為尾追、線導及提前角。③ATT 參數。最大速度50 kn,最大轉彎角速度20°/s,殺傷半徑為10 m,主動系統的探測距離為1 000 m。在每組仿真條件下各進行100 次試驗,統計成功攔截的次數。
1)不同攔截方式的概率對比。
仿真中來襲魚雷導引方式分別尾追、線導和自動調整提前角導引,限于篇幅文章中僅給出自動調整提前角導引仿真結果,如圖7所示。
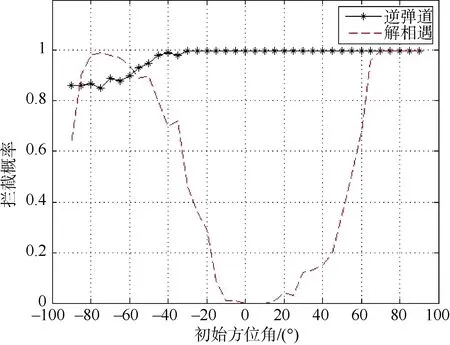
圖7 2 種攔截彈道的攔截概率Fig.7 Interception probabilities of 2 interceptor trajectories
可以看出,在來襲魚雷的初始方位角范圍為–60°~60°的情況下,采用解相遇攔截方式時由于ATT 發現目標時弦角過大,受機動性影響不能有效地攔截來襲魚雷;而采用逆彈道攔截方式時,ATT通過回旋至來襲魚雷的逆彈道,發現目標時弦角較小,可有效地進行攔截。
2)ATT 探測距離對攔截概率的影響。
考慮2 種ATT 探測距離條件,即1 000 m 和2 000 m,來襲魚雷在自動調整提前角方式導引下的攔截概率如圖8所示。
圖8 ATT 探測距離對攔截概率的影響Fig.8 Effect of ATT detection range on interception probability
可以看到,在來襲魚雷的初始方位角范圍為–90°~–40°時,探測距離的增加可提高攔截概率。這是由于來襲魚雷速度矢量橫向分量與本艦相同,在ATT 回旋至來襲魚雷的逆彈道時,若探測距離大,可提前發現來襲魚雷并做有效機動,彌補了在這個方位角范圍內聲吶探測誤差的影響。
在來襲魚雷的初始方位角范圍為20°~60°時,由于來襲魚雷速度矢量橫向分量與本艦相反,來襲魚雷與本艦距離較近,探測距離的增加將會導致ATT 未回旋至來襲魚雷逆彈道時便發現目標,此時ATT 與來襲魚雷的弦角過大,未能做有效機動,從而導致攔截概率降低。
3)ATT 速度對攔截概率的影響。
考慮3 種ATT 速度條件:①與來襲魚雷速度比為1.0;②與來襲魚雷速度比為0.8;③與來襲魚雷速度比為1.2。來襲魚雷在自動調整提前角方式導引下的攔截概率如圖9所示。
圖9 ATT 速度對攔截概率的影響Fig.9 Effect of ATT speed on interception probability
在來襲魚雷的初始方位角范圍為–90°~–40°時,ATT 相對于來襲魚雷的速度比越大,攔截概率越高。因為這種情況下來襲魚雷相對ATT 的弦角略大,ATT 在高速條件下更易形成對于來襲魚雷的迎面攔截態勢,從而獲得更好的攔截效果。類似的,在來襲魚雷的初始方位角范圍為40°~70°時,ATT速度越大將更有利于提高其攔截效能。
5 結束語
由于水下高速目標探測困難、魚雷水中高速機動困難、反魚雷軟硬手段相互干擾等原因,ATT 研制技術難度較大,許多關鍵技術尚待突破。目前各國ATT 武器仍處于研制的初級階段。但在魚雷防御體系中,ATT 仍是最有前景的發展方向之一。
猜你喜歡
工業設計(2022年8期)2022-09-09 07:43:20
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
裝備制造技術(2019年12期)2019-12-25 03:06:46
制造技術與機床(2019年10期)2019-10-26 02:47:06
中國洗滌用品工業(2019年4期)2019-05-11 09:27:34
鐵道通信信號(2018年5期)2018-06-28 03:06:24
家庭影院技術(2017年9期)2017-09-26 03:41:45
知識經濟·中國直銷(2017年5期)2017-06-15 20:28:19
通信電源技術(2016年6期)2016-04-20 06:21:32
