智能平流層浮空器Loon 關鍵技術分析與仿真
2023-06-27 04:56:32鄧小龍楊希祥朱炳杰麻震宇侯中喜
航空學報 2023年8期
鄧小龍,楊希祥,朱炳杰,麻震宇,侯中喜
國防科技大學 空天科學學院,長沙 410073
臨近空間介于傳統航空空間和航天空間之間,是人類活動的新空間和國家安全的新疆域[1]。臨近空間蘊藏著高高空長航時信息服務、遠程機動快速投送以及上可制天、下可制空/制地/制海/制信息等巨大軍事、民用戰略價值,已成為國際戰略競爭前沿[2]。
平流層浮空器是目前開展臨近空間研究與應用的重要平臺載體,具有駐空時間長、載荷能力強、飛行高度高、使用效費比高等顯著優點,相較于航空平臺和航天平臺,在時間分辨率和空間分辨率上具有顯著優勢,在網絡通信、遙感遙測、科學研究、態勢感知等領域有巨大的應用能力[3-4]。平流層浮空器主要包括平流層飛艇和高空氣球。平流層飛艇通常采用流線型外形設計,依靠太陽電池和儲能電池構成的循環能源驅動推進系統,在設計高度上進行定點飛行、區域駐留,平流層飛艇系統龐大復雜、設計難度高,面臨囊體、能源、控制等關鍵技術與核心問題,目前仍有待進一步的技術攻關驗證。法國Thales 公司的Stratobus 平流層巴士和美國Sceye 公司的HAPS 平流層飛艇是國外公開在研的典型長航時飛艇項目[5-7]。高空氣球是一類無動力平流層浮空器,其運動取決于所處的風場環境,根據內外壓差大小可分為零壓氣球和超壓氣球2 大類[8]。作為開展臨近空間科學研究與技術驗證的最主要平臺,高空氣球的主要研究機構有美國NASA、日本JAXA、法國CNES、瑞典SSC 等,其最大搭載能力超過3 t,最大飛行高度超過50 km,最長飛行時長超過300 天[9-11]。
研究發現,平流層風速和風向隨著海拔變化而變化,且存在較規律性的準零風層[12]。針對此規律,人們在高空氣球技術方案基礎上,創新性地提出了基于風場環境利用的平流層浮空器系統,其基本思想是通過氣球對不同高度風層中的風速和風向進行合理利用,實現氣球平臺的區域駐留或飛行軌跡規劃[13]。這種通過簡單系統組成、小型平臺規模、低制造和使用成本的技術途徑,顛覆傳統高空氣球在應用能力方面的不足和平流層飛艇對共性技術的嚴苛要求,已成為近年來航空航天的前沿研究領域[14-16]。事實上,由于基于風場利用的浮空器具有的持久駐空能力、飛行軌跡可控能力和高可靠性,其在行星探測方面也表現出巨大的應用前景。例如,美國JPL 實驗室的Hall 等通過分析金星和泰坦星球的環境特點,對比研究了多種高度調控機制的浮空探測器方案,并結合動力學仿真分析了浮空器的動態部署過程[17]。
相較于高空氣球和平流層飛艇,基于風場環境利用的平流層浮空器也需要克服與其工作原理相關的特有的關鍵技術[18]。例如,在風場利用方面,人們提出了多種途徑來開展平流層浮空器對不同風層的利用,如調節囊體中壓艙空氣量[19]、壓縮調節浮力體的體積[20-21]、內置超壓儲氣調節[22-23]、氣動舵面牽引[24-25]、串聯多氣球系統[26-27]等。這些創新性研究使得此類新型平流層浮空器成為前沿研究領域,催生了World View、STRATACUS、Space Perspective、Loon 等創新項目的實施[3,28]。其中,Loon 氣球項目通過調節囊體中壓艙空氣量進行平臺高度調控,在技術創新和應用探索方面取得大量前瞻性和突破性進展,對于新型平流層浮空器技術研究具有重要參考價值[29-31]。
事實上,Loon 氣球作為基于風場利用的平流層浮空器典型項目,其在系統設計、控制方法、風場利用等方面進行了大量的創新性、系統性、深入性的研究,并開展了充分的實踐探索,在技術上證實了基于風場利用的平流層浮空器的可行性和先進性。因此,對Loon 氣球技術方案進行研究和分析,將為此類飛行器的設計和應用提供重要的支撐。
本文首先對Loon 氣球的項目概況及實踐探索進行總結分析,然后對囊體材料與結構、高度調控、能源與推進、安控回收、風場建模、自主控制等核心關鍵技術進行了深入的討論分析,在此基礎上,對事關總體方案可行性的總體參數、超熱超壓、氣體泄漏、能源平衡、軌跡規劃等進行仿真分析,提出發展啟示與建議,為基于風場利用的新型平流層浮空器發展、論證、設計、試驗、應用等研究提供參考借鑒。
1 Loon 氣球項目概況
Loon 氣球項目于2013 年正式提出,由谷歌X 實驗室負責,致力于通過高空氣球設計、研制、試驗技術及其控制方法,開拓高空通信技術,在世界范圍內提供穩定可靠的平流層網絡信息服務[32]。Loon 氣球的研究工作主要涉及航空、通信和人工智能等領域。
Loon 氣球通常以多個氣球編隊的方式實現對地面區域持續網絡覆蓋。圖1(a)所示為Loon氣球的網絡架構,其包括多個Loon 氣球,通過氣球搭載載荷之間的相互通訊組建平流層網絡,通過載荷與地面裝置之間進行網絡互通,實現地面用戶的網絡接入。這種基于平流層飛行平臺的網絡一方面可與現有的地面網絡系統共存,拓展傳統地面網絡覆蓋范圍;另一方面可極大地增強通信網絡在自然災害和應急事件中的彈性應對能力。圖1(b)所示為Loon 氣球的工作原理。由圖可知,有別于常規超壓氣球的定高飛行和零壓氣球的高度波動飛行,Loon 氣球基于對風場環境的分析,主動調節飛行高度,通過利用不同高度風速風向的差異,實現其飛行軌跡的規劃和控制。
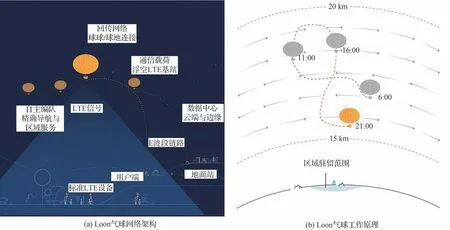
圖1 Loon 氣球網絡與工作原理Fig.1 Network and principal of Loon balloons
2014 年,Loon 氣球成功實現了平流層與地面之間的LTE 互通驗證;2015 年,研制了氣球的自動發放系統,可自動實現30 min 內完成充氣、提升、放飛等流程;2017 年,正式開始商業應用探索,與Telefonica 公司和秘魯政府合作,采用Nokia 的LTE 技術為該國受洪災地區提供網絡服務,隨后為波多黎各受颶風災害地區提供通信服務;2019 年,谷歌與軟銀的HAPSMobile 公司合作研制通用的平流層通信載荷,以探索其在平流層飛艇和高空太陽能飛機上的使用,此時Loon氣球累計完成平流層飛行100×104h,累計飛行距離7 000×104km;2020 年,Loon 氣球開始為肯尼亞提供大范圍覆蓋的商用網絡服務,同年與HAPSMobil 發起共建高空平臺通信聯盟(High Altitude Platform Station Alliance,HAPS Alliance),其涵蓋了世界上的電信、航天、教育及政府機構,目的是促進平流層飛行器的使用與應用,建立HAPS 生態,制定HAPS 網絡互操作性的標準化[33];2021 年,由于商業利潤受限原因,暫停了Loon 項目;隨后,持續參與該項目的美國Raven Aerostar 公司收購了Loon 項目的知識產權,并專注于平流層浮空器平臺的軍事應用能力驗證。
表1 為Loon 氣球項目啟動以來主要型號的部分參數。可以看出,其系統組成、技術體制、設計參數等被多次修改調整,同時飛行性能也大幅提升。具體表現為,氣體體積逐漸增大,系統總質量逐漸增大,平均駐空能力大幅增加,氣球的副氣囊構型多次調整。例如,項目初期Lark 系列氣球體積約為750 m3,采用隔膜式副氣囊設計,高度調控范圍約為2 km,平均駐空時長為13 天。隨著項目推進,谷歌在材料、工藝、系統組成等方面進行了大量改進,并且不斷改進副氣囊方案,對于最新研制的Quail 系列,氣球體積增加至2 760 m3,高度調控范圍約4 km,平均駐空時長大于240 天。
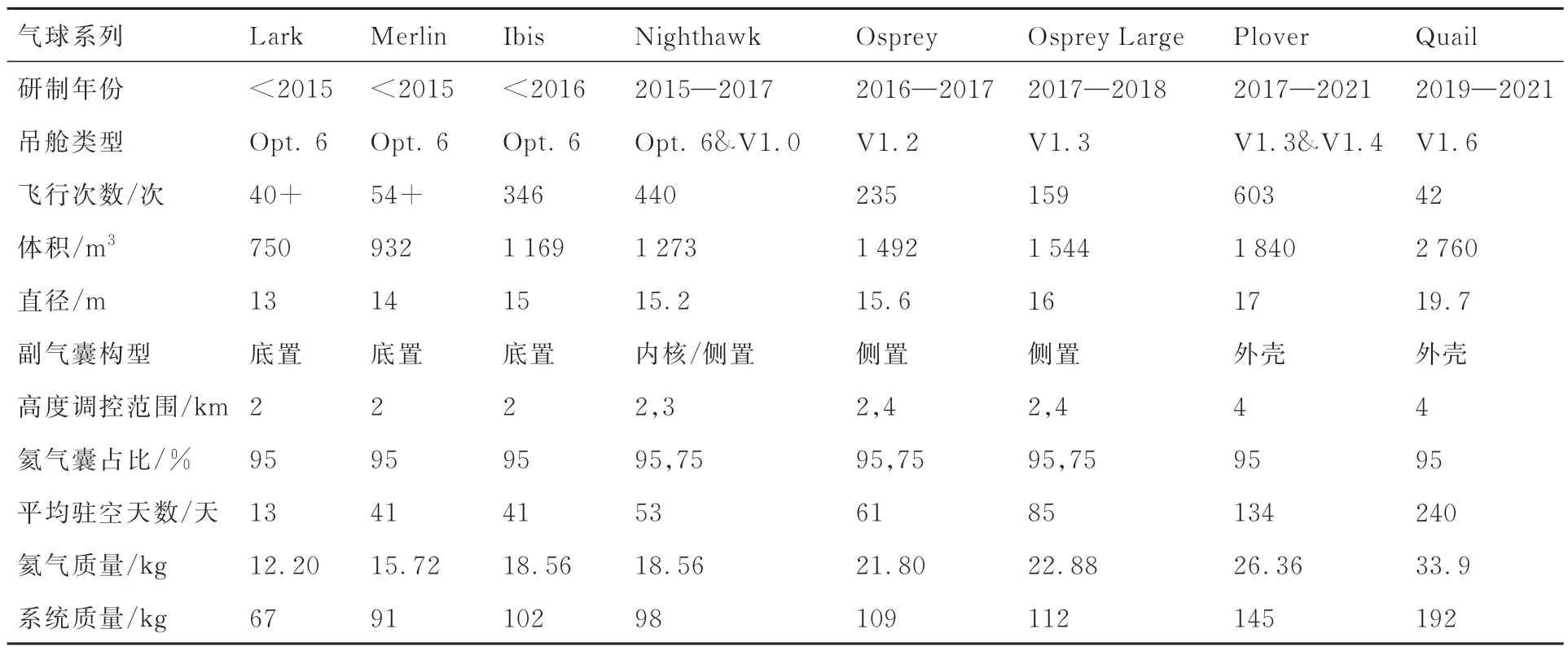
表1 Loon 氣球各系列的主要參數Table 1 Main parameters of series of Loon balloons
Loon 氣球的Quail 系列平臺組成如圖2 所示,其主要包括球體、吊艙和載荷3 部分。球體部分主要包括主氣囊、副氣囊以及高度調節系統(Altitude Control System, ACS)。其中,主氣囊采用超壓體制,副氣囊采用零壓體制,高度調節系統位于底部,采用氣泵和閥門組合。球體部分主要作用是為平臺提供駐空所需要的浮力,并根據任務要求壓入或排入空氣,進而實現對氣球平臺駐空高度的調控。吊艙部分主要包括吊艙結構、航電、能源、回收及推進等分系統。載荷部分主要包括用于氣球與地面的LTE 設備和氣球與氣球的通信設備。

圖2 Loon 氣球系統組成Fig.2 Components of a Loon balloon
2 關鍵技術分析
對于在環境惡劣的平流層進行持久飛行的Loon 氣球,具備如百天量級的長航時駐空、快速抵達服務區域的導航、持久區域駐留和氣球平臺編隊組網等應用能力,其在總體設計、共性技術和試驗保障等方面均面臨諸多技術挑戰。為此,針對Loon 氣球在材料、結構、高度調控、能源、推進、回收、風場、導航等諸多方面開展了大量研究。
2.1 材料與結構
2.1.1 球體結構
在駐空飛行階段,Loon 氣球的主囊體始終與外界大氣之間維持一定的壓力差,即超壓。這使得氣球在平飛時能維持總體積和外形,進而保持其飛行高度。Loon 氣球的主囊體采用南瓜形超壓充氣結構,這也是高空氣球性能得以突破的新技術。Loon 主要與Raven Aerostar 公司進行超壓氣球的生產合作,該公司是美國主要的浮空器研制生產單位,長期為美國軍方提供浮空器裝備。
如圖2 所示,南瓜型超壓充氣結構的基本思路是采用3D 囊瓣,相鄰2 根加強筋通過小曲率半徑的薄膜球膜連接,球膜環向應力僅與局部曲率半徑相關,經向張力傳遞給加強筋,因此薄膜張力與囊體整體尺寸無關,從而大大降低對薄膜材料力學性能的要求,保證了囊體的耐壓性能;同時,對囊瓣采用恒定環向曲率半徑設計,使得沿經向的環向應力處處相等,充分利用薄膜的力學性能。在指定超壓量的氣球結構設計中,主要設計變量有囊瓣數量、囊瓣幾何外形、囊瓣與加強筋的長度差、囊瓣與加強筋的粘著點數量等。
超壓氣球結構中,在超壓作用下球體的經向力由加強筋承擔。超壓氣球的壓差和溫度在晝夜發生變化,由于加強筋與球膜的材料力學參數不同,受力不同,二者變形將不同,進而在加強筋和球膜之間產生復雜的非線性接觸力學問題。事實上,如何通過球體設計、加強筋和球膜力學參數的匹配、加工工藝設計來降低加強筋和球膜之間的應力集中是超壓控制的難點。對于Loon氣球,加強筋的長度變化量遠大于球膜材料,二者之間的長度差控制在3%~7%。
為了調節駐空高度,Loon 采用二元氣球體制,即用2 個氣室分別裝空氣和氦氣,氦氣用于提供浮升力,空氣作為壓艙物。如圖3 所示,針對囊體的質量效率比、高度調控范圍、成本和防泄漏需求,根據空氣囊位置及布局特點,谷歌先后設計了4 種不同的氣球構型,分別為底置式、側置式、內核式、外殼式。其中,底置式是最常用的布局,通過赤道附近的橫向隔膜將空氣和氦氣分開為上下2 個氣室;側置式通過縱向隔膜將空氣和氦氣分開為左右2 個氣室;內核式采用內置的球狀空氣囊;外殼式采用內置的球狀氦氣囊。外殼式設計的質量利用率較低,但是由于氦氣填充在零壓內置氣囊中,使得囊體及焊接帶的氦氣泄漏率極低,有助于進一步提升氣球的駐空時間,成為Loon 氣球實現百天以上長航時的關鍵。
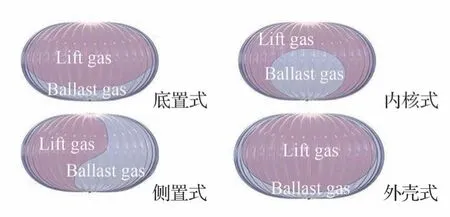
圖3 Loon 氣球結構構型Fig.3 Structure architecture of Loon balloons
2.1.2 材料與工藝
囊體材料性質是氣球持久駐空性能的決定性因素。一方面,材料應具有較好的抗拉伸性能,承受囊體超壓帶來的應力,該應力的大小由于晝夜交替和高度調控而呈現出交替變化;另一方面,材料應能較好地抵抗循環的熱、紫外等應力帶來的性能退化。
Loon 氣球囊體采用聚乙烯(PE)薄膜材料制作,通過對不同PE 材料進行大量測試,最終選定厚度為38.1 μm 的定制吹制PE 材料,其內部命名為PE01 材料。相較于常規PE 材料,這種交聯、取向的PE01 聚乙烯材料具備更高強度和抗老化能力。同時,PE01 材料還提升了光學透明度,進而降低工作溫度和材料性能退化。此外,Quail系列單個氣球的焊接帶總長度達到3.5 km,維持氣球焊接加工的高質量和一致性十分關鍵。
加強筋是超壓球體耐受大超壓量的主要承力部件,沿主囊體外表面經線方向均勻分布,通過法蘭盤在氣球頂部和底部匯集,用于維持主氣囊曲線外形并承受主要的經向載荷,可顯著降低主囊體經向應力,提高主囊體耐差壓能力。Loon氣球的加強筋采用編織超高分子聚乙烯(UHMWPE),每根加強筋可承受1 000 kg 以上的拉力。
為了提高囊體制造的容錯能力和可靠性,針對氣球囊體及其材料的測試項目包括掃描厚度、拉伸測試、鼓泡試驗、耐揉搓測試、低溫測試、囊體耐壓測試等。同時,還開展Loon 氣球的副氣囊循環充放氣試驗。
針對加工過程的材料優選和失效試驗后的材料分析,谷歌研制了2.4 m×24 m 的大型平板掃描儀,其通過采用極化玻璃背透的方式對單個幅瓣進行自動的高分辨率掃描、查看、標記、測量和數據處理,可辨識應力、失效點等重要特征。該設備還用于長時飛行試驗后的材料失效與性能退化的檢測分析。
2.2 高度調控系統
Loon 氣球的高度調控系統位于主氣囊的底部,主要包括壓縮機和閥門,用于將空氣壓入氣球或排出氣球,是氣球進行風場利用的關鍵設備。為了將空氣壓入超壓氣球,使用電動渦輪機來進行壓縮,如圖4 所示。
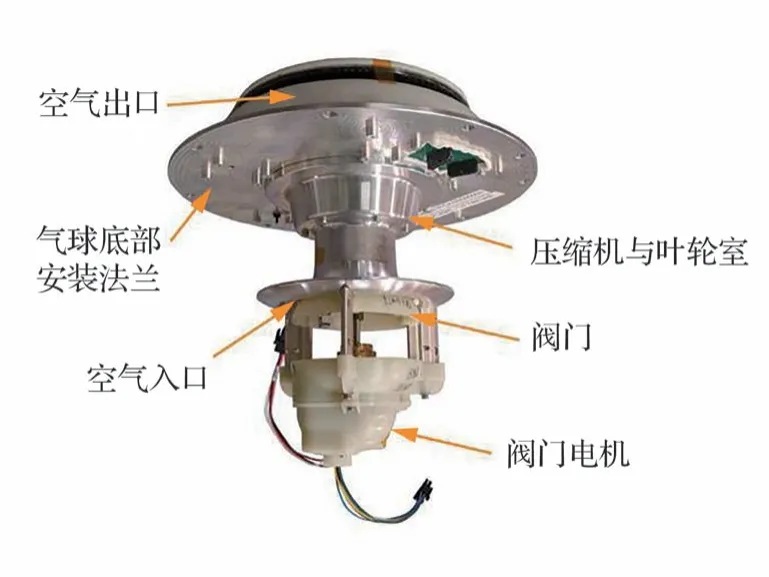
圖4 壓縮機組成示意圖Fig.4 Schematic of compressor components
高頻次、長壽命、高可靠是高度調控系統面臨的主要挑戰,通常Loon 氣球的壓縮機運行次數>6 000 次,閥門工作次數>12 000 次,壓縮機工作時長>1 000 h。在設計時,應充分權衡效率、質量流量、可靠性的要求。Loon 氣球的高度調控系統是基于輪子動力學開展渦輪葉輪進行設計,采用高質量有限元網格和準確定邊界層條件,并在模型中考慮流動分離。針對其不同工作條件,渦輪的運行速度范圍較寬,因此還應分析多工況下的效率。
電動渦輪機中部件材料的熱膨脹特性存在差異,由此產生的不匹配將導致軸承系統的過載和欠載,進而影響高速旋轉部件的壽命。為此,谷歌提出了被動熱補償軸承預緊方案,對軸承沿熱變化方向進行預加載。在壓縮機部件制造后,還針對性地開展部件的加速計振動分析,用于缺陷篩選。
高度調控系統作為Loon 氣球正常工作的核心部件,對其工作狀態監測十分重要。為此,谷歌提出了基于機器學習的無傳感器在線壽命預測方法,建立了3 節點k折機器學習模型,具有多傳感器輸入,針對性能良好的渦輪機和后期故障進行訓練。該預測模型在氣球平臺上本地運行,通過監測系統與模型輸出的偏差,判斷是否將出現故障。
2.3 能源與推進
2.3.1 能源系統
Loon 氣球的能源系統主要包括太陽電池、儲能電池、能源管理與配電等,用于為各用電設備供能,其中,高度調控系統和載荷系統是用電最多的設備。對能源系統設計有重要影響的參數包括儲能電池的能量密度、太陽電池的功率密度、自主導航系統效率等。表2 為在不同類型吊艙中采用發電與儲能設備的主要參數。
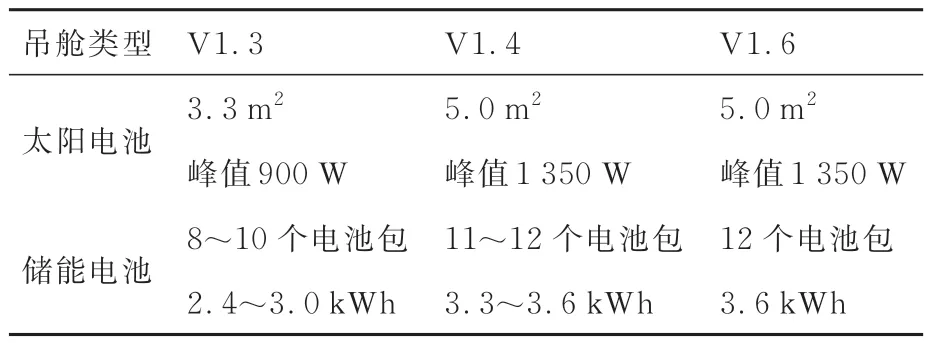
表2 發電與儲能設備參數Table 2 Parameters of power generation and storage devices
儲能電池采用18650 型號的鋰離子電池,后計劃改用21700 型電池以提高能量密度。電池包采用12 串2 并的連接方式,多個電池包采用并聯方式供電,供電電壓為36~50.4 V。同時,Loon氣球采用工作在常規溫度范圍的鋰電池,實時監控其溫度,并控制其環境溫度在15 ℃附近。
Loon 氣球采用單晶硅太陽電池,后期型號太陽電池陣面積為5.0 m2,采用6 塊太陽電池組件,各組件由49 個單體連接,優化封閉工藝降低面密度,同時研制了X 型結構加強設計以確保在轉運和飛行中不會彎曲或破損。太陽電池陣通過MPPT 與儲能電池組連接,使得太陽電池始終工作在最大功率點處。
高空氣球在飛行時受外界環境和內部對流影響一般會持續旋轉,并帶動吊艙隨之單方向較穩定的旋轉[34]。安裝在吊艙上的太陽電池將同吊艙轉動,進而縮短太陽電池的光照時長,降低發電性能。為此,谷歌研究了方位角測定與控制方法,通過2 個太陽輻照傳感器和雙天線GPS 接收機測定太陽位置,通過步進電機與諧波減速器對氣球和吊艙旋轉進行解耦,并對吊艙設備的方位進行調整,同時使用滑環進行電信號和功率傳輸。
2.3.2 推進系統
為了進一步提升操縱性能,Loon 氣球研究了電機螺旋槳的側推方案,提供1~3 m/s 的推進能力,用于減小不利風場的影響或提高其到達有利風場的能力,同時還能增加氣球的對流換熱。圖5為Loon 氣球推進系統設計圖。
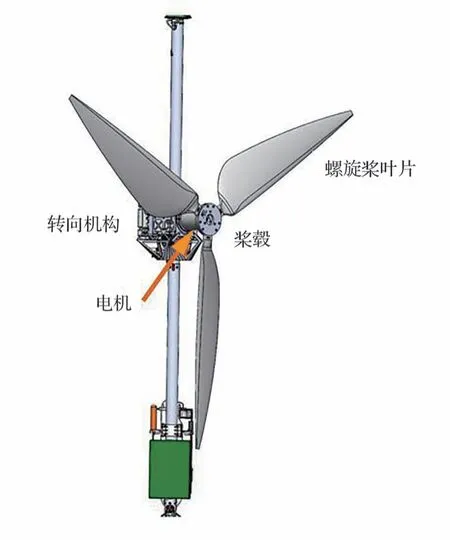
圖5 Loon 氣球推進系統Fig.5 Propulsion system of Loon balloons
推進系統安裝在氣球和吊艙之間的硬制連接桿上,主要包括動力電機、螺旋槳、轉向機構、制動機構等。為提高驅動效率和扭矩,推進系統采用直驅方案。動力電機為無刷直流電機,可在一定的高度和功率區間高效運行,其工作點效率約為90%。螺旋槳為2 m 直徑的3 葉槳,包含3 個槳葉和1 個槳轂,并對螺旋槳的振動、強度和老化特性進行了相應的優化。轉向機構采用步進電機驅動蝸輪傳動,用于使螺旋槳產生指定方向的推力。制動機構采用契形剎車片設計,用于阻止氣球系統快速下降時螺旋槳的自旋轉,消除動力電機可能產生的過電壓和動力系統故障。
2.4 安控回收
安控回收是平流層浮空器的一項關鍵技術,Loon 氣球的回收方式與常規高空氣球不同。Loon 氣球終止任務后的系統安全、下降和回收主要通過飛行終止系統和傘降系統共同完成。
飛行終止系統安裝在氣球頂部,其根據飛行終止指令要求,通過旋轉切割器產生放氣窗口排放氦氣。該系統可產生3 種大小的放氣窗口,對應快速、慢速和極慢速下降。傘降系統包括球艙分離設備、氣球降落傘、吊艙降落傘等,用于對氣球和吊艙分別進行回收。
Loon 氣球對計劃著陸、意外終止和快速失壓3 種場景分別設置了對應的安控回收方案,主要差異在于安控流程、分離高度設置等。以計劃著陸為例,其工作流程如圖6 所示:①確定落區,設置分離高度;②啟動飛行終止系統,氣球開始下降;③在低空分離高度(一般約3 000 m)觸發球艙分離設備,氣球與吊艙分離;④吊艙下降穩定后,依次打開引導傘和吊艙主傘;⑤氣球內氣體排放充分后,從氣球底部依次打開引導傘和氣球主傘;⑥吊艙和氣球落地后,均與降落傘分離。
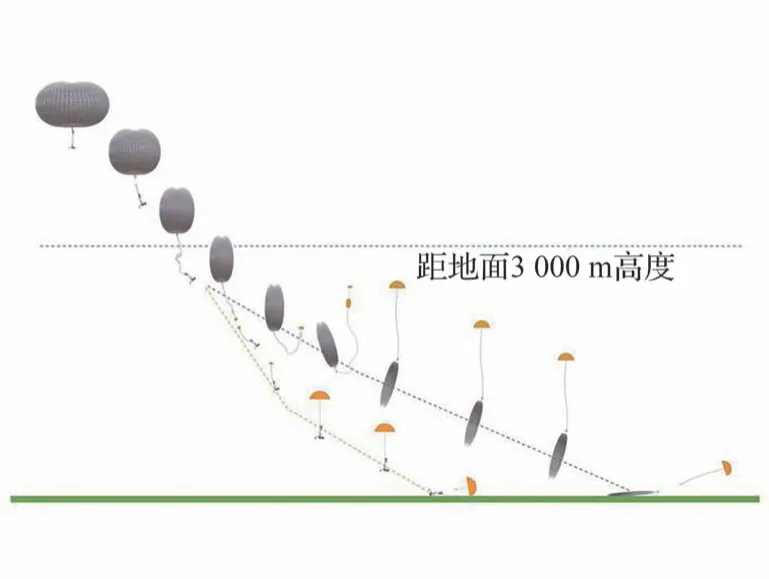
圖6 Loon 氣球的計劃著陸下降流程Fig.6 Descent stages of Loon planned landing
2.5 風場建模
風場預報與建模數據的準確性是Loon 氣球開展自主飛行決策和仿真分析的重要前提,其應用了直接觀測數據、中長期預報數據、歷史再分析數據和臨近預報數據等多源氣象數據。表3 為Loon 氣球飛行中使用的實時數據,主要包括預報數據和觀測數據,具體包括高分辨率歐洲中長期天氣預報(ECMWF HRES)、美國海洋和大氣管理局全球預報(NOAA GFS)、美國國家大氣研究中心災害天氣預報(NCAR/BCI)、Loon 觀測數據等,各預報數據及觀測數據的要素、分辨率、更新頻次均不一樣。在歷史再分析數據方面,谷歌主要使用了上述氣象預報部門對1980—2021 年仿真與再分析的全球環境數據集。

表3 Loon 氣球自主飛行所用的實時數據源Table 3 Real-time data sources for autonomous navigation of Loon balloons
在Loon 氣球的實際飛行時,需要融合網格化的預報數據和稀疏的觀測數據,類似于數值天氣預報中的數據同化方法。其中,氣球觀測數據權值的大小與其距離采樣點和采樣時間成反比。同時,風場建模軟件還估算風場的置信度,從距離觀測點更近的高置信度降低至距離觀測點更遠的低置信度,得到的置信值可用于高度調控算法的探索任務。為提高中長期預報精度,研究了基于歷史數據的相似集合預報方法。該方法可通過基于歷史數據對集合預報進行訂正,有效降低預報誤差[35]。結果發現,針對ECMWF 預報數據,其風速和風向的預報誤差分別降低了12%和20%,可通過分布式計算和深度神經網絡提高相似集合預報的運行速度。
對Loon 氣球及其編隊飛行的仿真分析主要基于ECMWF ERA5 等大氣再分析數據集。需要注意,再分析數據集是指利用數據同化系統將各種觀測資料和數值天氣預報產品進行融合并得到的最優集成,獲得穩定、無一且精確的長序列歷史分析產品。但是,生成再分析數據時可使用的平流層觀測數據非常有限,導致該高度范圍的再分析數據準確性欠佳。因此,在開展Loon氣球全球范圍可達性時,再分析數據并不能較準確地提供各地平流層風場結構特征。此外,由于再分析數據相對較平滑,在仿真分析中,Loon 氣球通過添加風場噪聲的方式來增加風速和風向的高頻特征,分析其對調控算法的影響。
2.6 自主導航與控制
Loon 氣球通過編隊導航系統實現自主利用風場抵達指定區域、與編隊中其他氣球協同工作等目標,該系統從底部到頂部的3 層功能架構為:區域操縱控制系統Steering Controller、長程導航系統 Cartographer 和編隊規劃系統 Dispatch。
2.6.1 區域操縱控制系統
區域操縱控制系統根據區域風場模型,決策單個氣球實現區域駐留(位置目標)或100 km左右近距離軌跡規劃(方向目標)時的風層利用方案或推進系統工作方案。系統的輸入包括遙測數據、區域風場和目標(位置目標或方向目標),輸出為氣球高度調控的指令。該系統面臨的主要挑戰和解決思路:①平流層預報誤差大,嚴重影響控制規劃的確定性,需利用機器學習中探索和利用策略對氣球可達范圍的風層進行研究并更新數據庫;②高度調控速度有限,影響其敏捷性和風場利用能力,可在總體設計中提升高度調控系統能力;③升降過程的耗時和耗能差異大,控制器設計時應分別考慮;④氣球下方的強對流天氣可能對氣球系統帶來擾動或放電過程,或者一些區域禁止穿行,應在規劃中設置禁飛區;⑤區域控制最優方案隨著Loon 氣球與目標距離的變化而改變,當距離較遠時應傾向于朝向目標的更快風場,而較近時則傾向于較慢風場。
Loon 氣球的區域操縱控制系統先后經歷了樹搜索算法和深度強化學習算法。樹搜索是一種近鄰搜索算法,通過探索氣球所有可行的運動序列,并對各序列仿真和打分。早期,Loon 氣球使用樹搜索算法發現,由于該算法的最優性和確定性特征,使得其難以考慮風場環境的不確定因素影響,存在控制健壯性不足。而且,隨著搜索域的增加,樹搜索算法的計算量將指數增加,難以面向更長的時間和更大的區域范圍。隨后,對樹搜索算法進行改進,考慮期望風向誤差、期望風向置信值、期望風速誤差和期望風速置信度,構建搜索期望函數對氣球可達高度進行排序。當氣球離目標區域較遠時,以風向為主導,靠近后以風速為主導。
各高度的期望值由式(1)期望函數確定:
式中:C(x)為風場的置信度,取值0~1;G(x)為優度,代表風場對于導向目標的可用性,取值0~1;x為高度;ε與k為常數。
在式(1)中,等號右側第1 項用于鼓勵探索,當某些高度處風場置信度低時,將鼓勵氣球訪問k期望的高度層;第2 項用于鼓勵利用,當置信度高時,將對風場賦予更大的優度。參數ε與k用于平衡探索與應用。
為了避免過多、過大的高度調節指令,對期望函數改為
式中:等號第3 項為高度調節懲罰項;x0為當前高度;a1和a2為常數。
之后,谷歌開始使用深度強化學習算法訓練各種場景條件下的操縱控制器[29]。對于區域駐留問題,針對優化目標,引入獎勵值r,當球在駐留點50 km 以內時取r=1。獎勵值與在t時刻的氣球狀態st相關,并由對動作at(上升、下降或停留)的響應來提供。最優控制器是對未來獎勵的期望折扣總和的最大化,或者稱之為“回報”:
式中:Rs表征飛行控制器從初始狀態開始的長期值;Ε為期望值;γ為折扣因子。
通過引入機器學習,Loon 氣球不僅優化了其飛行軌跡和能源消耗,還大幅提升應對復雜環境、復雜應用場景的能力。
2.6.2 長程導航系統
長程導航系統用于Loon 氣球的遠距離飛行航跡規劃,其根據全球中長期風場環境,生成全球范圍內面向特定目標的導航圖,為區域操縱控制系統提供指令輸入。
根據任務類型,長程導航系統可生成2 種類型的導航圖:快速抵達導航圖(ASAP)和指定時間抵達圖(AT)。快速抵達導航圖中每個位置點的數值對應于從該點到達目標區域所需的時間。區域操縱控制系統在此基礎上,判斷當前點及周邊區域各點的差異,選擇最快可達目標的周邊點,然后通過區域操縱控制系統調節氣球的工作高度,進而飛行至指令的周邊點。指定時間抵達圖上每個位置點的值對應于該點在規定時間窗口內到達目標區域的概率。長程導航系統在工作中加入禁飛區的設置,確保在遠距離規劃方面的安全性。Loon 氣球實際飛行時,在獲得風場預報數據更新后,長程導航系統將重新計算生成新的快速抵達導航圖和指定時間抵達圖。
快速抵達導航圖主要通過2 步來生成:一是產生地圖各位置點處Loon 氣球從某個時間t到下一時間t+1 的飛行軌跡的鏈圖,時間步長為預報系統提供新預報產品的間隔(一般為6 h)。也就是說,鏈圖是通過對氣球在各高度層飄飛6 h的系列化仿真計算得到。二是通過反推迭代的方法計算每個點的到達時間,即基于長期預報數據(10 或15 天),從目標區域周邊開始,計算出可在一個時間步長內到達目標的位置點,然后反復迭代計算直至當前時間。當Loon 氣球無法在長期預報時效(10 或15 天)到達目標區域,則需要利用每6 h 的全球再分析數據進行計算。
指定時間抵達圖的生成僅利用預報數據,其結果表征為特定時間窗口內到達目標的概率,用氣球在未來10 天內在特定時間到達目的地,這也是氣球編隊進行任務分配的重要基礎。
2.6.3 編隊規劃系統
編隊規劃系統針對任務區域持續覆蓋的要求,根據氣球編隊中各單元的位置及風場情況,確定各Loon 氣球的任務目標及時間窗口。同時,其負責的任務還包括:①當任務區域的風向單一,氣球難以維持區域駐留時,為了實現目標區域的持續覆蓋,則規劃Loon 氣球以一定的間隔依次飛抵目標點;②當Loon 氣球存在載荷類型差異、任務目標差異、服務類型差異時,則應根據各氣球平臺特點進行分別規劃;③針對短期情況進行規劃,如臨時增加的禁飛區、科學或工程測試等。
編隊規劃系統根據不同的載荷配置和商業目的對Loon 氣球進行分組。當一些氣球可滿足多類目標時,基于任務優選級、時間與區域要求等,通過編隊規劃系統內的拍賣方式進行任務分配。對于接近飛行壽命的氣球,編隊規劃系統設置了管理流程,通過設置等待區、著陸區和回收任務等進行氣球的終止規劃。
3 方案仿真分析
3.1 總體參數
基于Loon 氣球公開的基本參數和系統構成,對其總體設計參數進行分析。對于Quail 系列的氣球,其基本參數包括:氣球總體積為2 760 m3,最大直徑為19.7 m,高度調控能力為4 km,高度調控范圍為16~20 km,平臺重量為192 kg,單晶硅太陽電池陣面積為5.0 m2,鋰離子儲能電池能量為3.6 kWh。
本文應用的環境參數為美國標準大氣模式(US standard atmosphere 1976,USSA-1976)[36],高度20 km 和16 km 對應的主要參數如表4 所示。Loon 氣球在20 km 駐空高度處,所受總浮力為
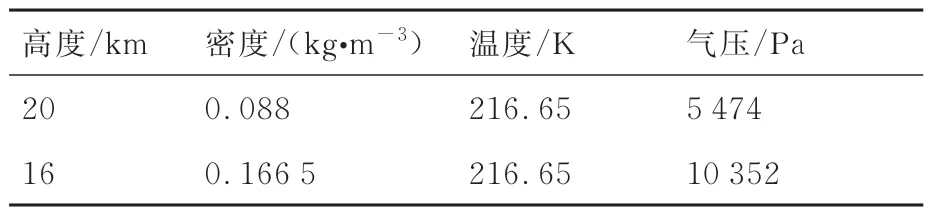
表4 Loon 氣球設計工作高度大氣參數Table 4 Atmospheric parameters at design altitudes of Loon balloons
式中:ρenv為駐空高度處大氣密度;Vhull為駐空時浮空器的總體積。
在正常平飛狀態下,主囊體會維持一定的內外壓差,參考超壓氣球的分析結論將夜間基礎超壓取值150 Pa,夜間基礎超熱取值5 K[37]。20 km高度時氦氣的體積占比為95%,根據理想氣體狀態方程,可分別計算20 km 駐空高度處氣球內氦氣與空氣的重量:
式中:ΔP為駐空時球體的超壓量;VHe為氣體內氦氣體積;RHe為氦氣常數;THe為氣體內氦氣溫度;Vair為空氣體積;Rair為氣體內空氣氣體常數;Tair為氣體內空氣溫度。
系統總重為平臺重量、氦氣重量和空氣重量之和,為236.2 kg。由此,Loon 氣球的浮力余量約為6.7 kg,滿足浮重平衡要求。平流層浮空器中浮升氣體的泄漏是不可避免的,為增加駐空時長,通常填充或攜帶額外的氦氣作為氦氣泄漏的補充[23]。因此,Loon 氣球可將部分浮力余量作為額外的氦氣填充在球體中。
如2.3 節所述,Loon 氣球為了提高其可達性能力,在改進方案中引入了螺旋槳電推進系統。由于不同高度處大氣密度差異以及不同高度處氣球內空氣質量的差異,導致推進系統工作時會使氣球出現不同程度的傾斜,改變阻力特性,進而影響推進功率需求。氣球的推進功率可由式(7)進行分析:
式中:CD為阻力系數,在分析中將推進導致的氣球傾斜等效為阻力系數改變;v為空速。
圖7 所示為Quail 系列氣球在16、18、20 km高度處推進速度-功率曲線。由圖可知,高海拔工作時的推進性能要顯著優于低海拔情況。以3 m/s 的推進空速為例,在16、20 km 上所需的推進系統輸出功率分別為140、430 W;當系統以5 m/s 的推進空速工作時,在16、20 km 上所需的推進系統輸出功率分別為650、2 000 W。工作高度差異對于推進功率的影響主要是由于較低高度工作時球內空氣更多,推進導致的氣球傾斜角更大,對應的阻力系數更大。
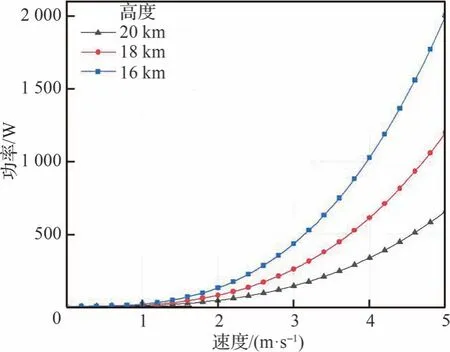
圖7 Loon 氣球推進空速與功率曲線Fig.7 Speed and power curves of Loon balloons
由此可知,當Loon 氣球在不同高度剖面上工作時,在推進和能源方面的約束存在較大差異,進而將對飛行軌跡可達性有不同的影響。例如,同等推進功率情況下,高海拔工作時的可達性將提升,這也為長程導航提供了更大的搜索域。
3.2 超熱超壓
超熱超壓是包括高空氣球和平流層飛艇在內的所有平流層浮空器持久駐空時面臨的一個重要挑戰。囊體材料及其內部氣體的溫度和壓力受到太陽輻照、大氣環境、地表等因素的影響產生晝夜交替變化的溫度與壓力,由此形成的應力將對結構安全和氣體泄漏產生綜合的不利影響[38]。例如,球體內部氣體超熱會導致超壓,可能對充氣結構的安全帶來風險;囊體材料上溫度不均勻分布可產生熱疲勞和局部熱應力,影響囊體壽命;超熱增加浮升氣體泄漏速率,影響高度保持能力[39]。
Loon 氣球平均駐空時長大于240 天,飛行路徑覆蓋不同緯度的海洋和陸地環境,必然經歷復雜的熱環境。本文基于多節點模型開展Loon 氣球的駐空熱特性分析,對比分析中低緯度的熱特性。由于囊體材料的熱物性參數并未公開,選取高空氣球常用PE 材料的參數值。圖8 為氣球的熱特性分析結果,由圖可知,低緯度地區氣球的冬至與夏至最大超熱量基本接近,晝夜溫差約為30 K;高緯度地區氣球的冬至與夏至超熱特性差異大,夏至時最大晝夜溫差約為30 K,冬至時最大晝夜溫差約為22 K。對于駐空期間的平流層浮空器,由于內部氣體晝夜溫度的變化,囊體內的超壓量也將隨之變化。基于超熱分析,可得Loon 氣球的最大超壓量將大于750 Pa,超壓量隨著基礎壓差的增加而增加。
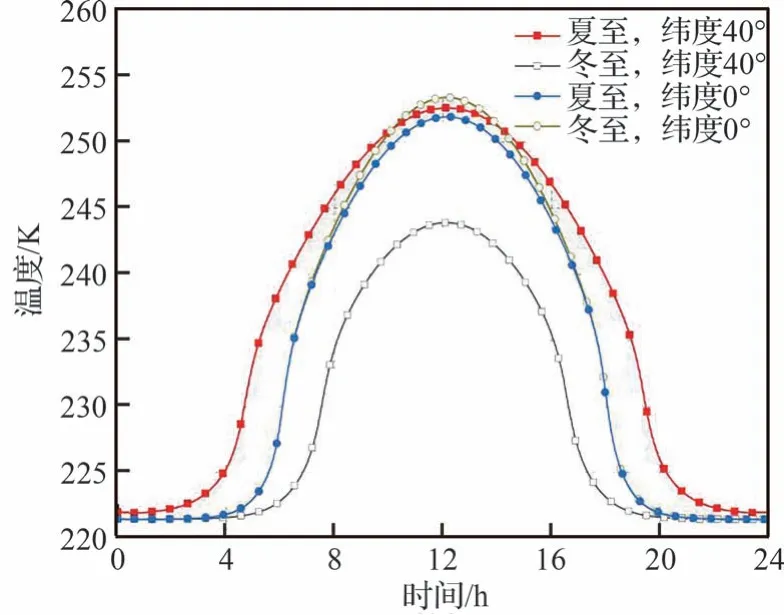
圖8 Loon 氣球熱特性Fig.8 Thermal property of Loon balloons
3.3 氣體泄漏
由于材料特性、制作工藝、結構密封等因素影響,浮空器都不可避免地存在氦氣泄漏,將直接影響其駐空時長[40]。平流層浮空器一般選用柔性層膜囊體材料,選用分子半徑小的氦氣作為浮升氣體,相比其他氣體更容易擴散、滲透。同時,囊體上眾多的設備安裝開口以及氣囊成形過程的熱合縫也可能存在滲氦問題。此外,采用超壓囊體結構抵抗超熱,日間駐空期間的差壓較大,也會加劇氦氣泄漏。
浮空器的氣體泄漏主要包括:材料本體的氣體滲透、囊體結構微孔的氣體泄漏、囊體破裂情況下發生明顯孔洞的氣體泄漏。Loon 氣球在項目初期重點關注制造工藝與材料本體的改進,在2017 年平均駐空時長突破100 天。為了進一步提升其駐空能力,對球結構上進行了創新,其外殼式構型的平均駐空時長突破了200 天。可以看出,Loon 氣球在材料和工藝上取得了長足進展,基本解決了孔洞氣體泄漏,并緩解了微孔氣體泄漏,駐空能力主要取決于本體的氣體滲透特性。
囊體材料本體的氣體滲透主要由材料性能和制造工藝決定。氣體在致密聚合物膜中的傳遞過程滿足溶解-擴散模型[41]。表示恒定溫度下、單位時間內單位面積材料的氣體泄漏體積的氣體滲透體積流量為
式中:κ為材料本體的氣體滲透系數;ΔP為囊體材料內外壓差;hm為囊體材料厚度。
下面對比分析內核式、外殼式2 種構型的氣體泄漏特性及其駐空影響。圖9(a)所示為2 種構型中浮空氣體泄漏途徑示意,圖中粗箭頭與細箭頭分別表示氦氣的主要與次要泄漏途徑。左圖為內核式構型的Loon 氣球,其主氣囊填充氦氣,氦氣主要通過主氣囊表面向環境大氣滲透,同時由于氦氣濃度差向內置副氣囊滲透并通過空氣閥門排出。需要注意的是,前一途徑是由于壓差導致,氣體泄漏量占主導,而后一途徑為零壓狀態,氣體泄漏量占比極小。右圖為外殼式構型的Loon 氣球,其副氣囊填充氦氣,與主氣囊保持零壓,氦氣主要通過副氣囊的部分上表面滲透,且等效材料厚度為副氣囊材料與主氣囊材料厚度之和,同時由于氦氣濃度差通過副氣囊向主氣囊滲透,并通過主氣囊或空氣閥門排出。
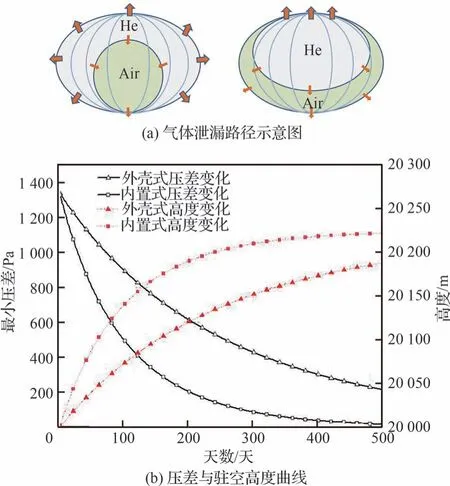
圖9 氦氣泄漏特性分析Fig.9 Analysis of helium leaking property
圖9(b)中對比分析了2 種構型氣球中因氦氣泄漏導致的壓差變化和駐空高度變化的情況。由圖可知,在駐空階段,外殼式構型氣球的壓差變化較小,從初始壓差值1 300 Pa 下降到200 Pa需要約500 天,而內置式構型氣球的壓差下降上述范圍需要約200 天。這說明在同等材料與工藝的情況下,外殼式構型可大幅降低氣體泄漏,提高駐空能力。同時,由于氦氣泄漏,氣球駐空高度將有所提升,這是由于氣體泄漏導致其系統總質量降低。因此,氣球平臺的上升量與氣體的泄漏量相關。
3.4 能源平衡
改善太陽光線與電池陣的入射夾角,優化太陽電池陣發電特性,是平流層飛艇、太陽能無人機等臨近空間低速飛行器提升其能源循環性能的重要方式[42-44]。Loon 氣球通過2 種方法對太陽電池發電性能進行優化,一是太陽電池陣采用斜面安裝方式,減小太陽高度角導致的入射角過低問題;二是對太陽電池引入了指向機構,使得其與太陽方位保持一致。這種方式類似于地面光伏發電系統的太陽跟蹤系統,也在高空氣球太陽電池標定中用于太陽跟蹤控制[45-46]。
下面,對太陽電池陣發電特性進行分析,取太陽電池面積為5.0 m2,光電轉換效率為20%,MPPT 效率為97%。對比分析太陽電池陣采用不同斜面安裝角度的發電差異,結果如圖10 所示。圖10(a)給出了夏至日與冬至日在北緯40°的20 km 高空中太陽電池陣采用不同斜面安裝傾角α時的發電曲線。由圖可知,當太陽電池陣采用水平安裝方式時(斜面安裝角度為0°),當太陽高度角大于0°時電池陣開始發電,但是此時入射角接近于0°,因此發電量從0 開始逐漸增加。而當太陽電池陣具有一定的斜面安裝角度時,入射角具有一定的初值,此時發電量將直接從某個初始值開始,該值與斜面安裝角度和日期有關。例如,對于夏至日安裝角為15°和30°的情況,太陽電池陣初始輸出功率分別為340 W 和630 W。顯然,雖然光照時長并未增加,但是太陽電池陣總輸出能量將提升。

圖10 太陽電池陣發電特性分析Fig.10 Power generation properties of solar array
圖10(b)對比分析了北緯0°和40°位置處具有不同斜面安裝角度的太陽電池陣逐日發電量曲線。顯然,太陽電池陣的傾斜安裝與指向調整可顯著改善其輸出特性。以北緯40°的情況為例,當安裝角為0°時,其全年最低與最高輸出功率分別為3.4 kWh 和11.1 kWh;當安裝角為15°時,上述值分別為6.2 kWh 和14.2 kWh。這將明顯改善氣球平臺的發電性能,拓展平臺運行過程中的能量約束。
Loon 氣球鋰離子儲能電池能量為3.6 kWh,這里設定其充放電效率為95%,鋰離子儲能電池可供夜間10 h 用電需求,取用電器總功率為360 W。當氣球上的設備在恒定工況工作時,對冬至、北緯40°的具有不同太陽電池陣斜面安裝角度(α=0°,15°)的循環能源特性進行分析。
由圖11 可以看出,當太陽電池陣采用平面布局(α=0°)時,白天太陽電池最多僅將鋰電池充至1 100 Wh,無法將鋰電池完全充滿,導致儲能電池在夜間19:30 左右耗盡,無法實現晝夜閉環。因此,考慮到Loon 氣球廣泛的應用范圍和持續的工作時間,為確保其能源閉環,采用太陽電池陣平面鋪裝時無法滿足全年的能源循環要求。當太陽電池陣采用傾面安裝(α=15°)時,日間可實現儲能電池的完全充電,且最深放電情況下仍有770 Wh 的電量。
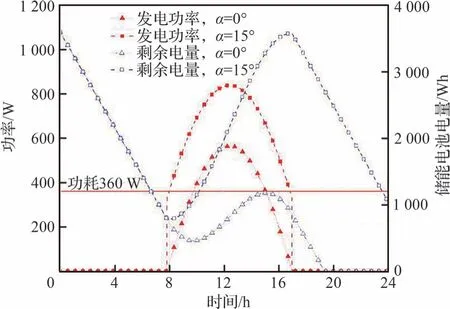
圖11 能源晝夜運行仿真結果Fig.11 Simulation results for operation of energy system during day and night
3.5 軌跡規劃
如2.6 節所述,根據任務類型,Loon 氣球通過3 個功能層的協同工作完成自主導航全流程的控制。其中,長程導航系統根據大尺度中長期天氣預報數據開展Loon 氣球在長距離上的路徑規劃,是評估氣球在大距離尺度上可達能力的重要依據。本節針對長程路徑規劃中的風場不確定性因素及推進能力因素對路徑可達能力進行分析。
基于馬爾可夫決策過程模型,通過值迭代方法對具有不同推進能力的氣球在某個風層中的區域可達性進行分析。圖12 為可達性分析結果,分別對應于具有0 m/s 和5 m/s 推進能力的氣球在飛行區域中到達目標點的期望時間,圖中的白色單元格為目標區域,其他各單元格的顏色代表其到目標點的時間。基于仿真的風層數據可知,當氣球無動力時只能通過風場的作用到達目標點,只有在較小范圍內可以快速部署到目標區域,大部分區域難以在該風層中直接到達目標點;當提供最大速度為5 m/s 時,氣球在當前風層中可實現較大的可達性,大部分區域均能在10 h內到達目標點,說明適當增加氣球的推進能力可有助于其軌跡規劃能力。
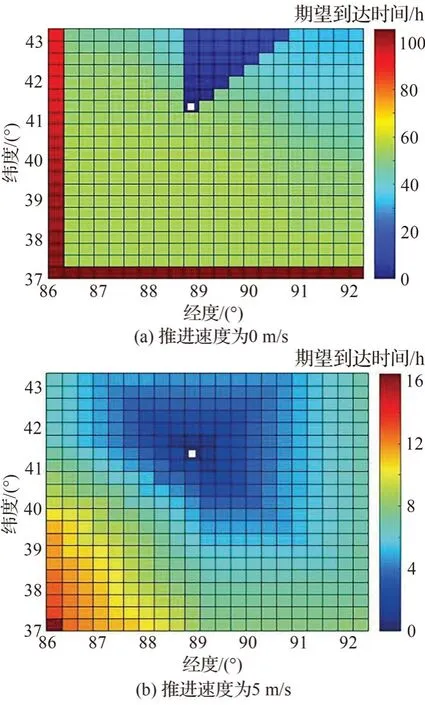
圖12 具備不同推進能力氣球的期望目標到達時間Fig.12 Expected target arrival time for balloons with different propulsion speeds
4 結 論
平流層浮空器基于高空氣球技術體制,通過結合對臨近空間風場的智能利用,可實現極強的駐空時長和自主飛行能力,在實現臨近空間應用方面有巨大潛力,是具有廣闊應用前景的新平臺。Loon 氣球經過近10 年的創新研究和實踐探索,在材料與結構、高度控制、能源推進、安控回收、風場建模和自主控制等平臺技術方面不斷開展創新設計和技術攻關。本文通過對項目概況及實踐探索總結分析,對平臺和自主控制相關的核心關鍵技術進行了深入的討論分析,并通過建模方法,重點圍繞其總體參數、超熱超壓、氣體泄漏、能源平衡、軌跡規劃等方面進行仿真分析,研究了以上關鍵技術的性能改進情況。Loon 氣球的技術探索與試驗驗證對基于風場環境利用的平流層浮空器的發展具有重要參考價值,結合本文研究分析,其啟示主要體現在以下4 個方面:
1) 持久駐空能力方面。駐空時長是衡量平流層浮空器綜合性能最重要的指標之一,也是其開展各類應用的前提。借鑒Loon 氣球平均駐空時長突破240 天的技術實現方式,為提升浮空器持久駐空能力,應關注浮空器材料、結構、工藝等方面的綜合優化。在材料性能方面,隨著駐空時長的提升,對材料在強紫外、高臭氧環境中的耐老化能力要求將大幅提升,應針對性研制輕質、高強、耐候、低吸收率的高分子材料;在結構設計方面,應開展基于非線性黏彈性模型的球體全飛行過程分析,同時針對薄膜材料與加強筋材料差異[47],優化球體與加強筋的匹配設計;在工藝方面,應選擇合適的加工工藝,加強對加工產品的檢測手段,嚴格控制工藝流程,防止微孔損傷的出現[48]。
2) 循環能源優化方面。太陽電池是平流層浮空器系統獲取能源的唯一途徑,提高太陽電池的輸出性能將有助于提升平臺的操縱能力和載荷能力。結合Loon 氣球技術方案,主要應從太陽電池的應用技術開展創新研究和設計。具體來說,一方面應采取太陽電池的定向與實時布局調整能力,通過準確定位太陽相對位置,調整太陽電池的角度,充分利用太陽輻射的能量,提高太陽電池的能量輸出特性[49];另一方面,應改善太陽電池封裝工藝和安裝方式,提高太陽電池的駐空安全性能和耐老化能力,降低太陽電池的面密度。
3) 目標可達能力方面。目標可達能力是指平流層浮空器能夠到達任務區域的能力,包括可達幾率及抵達時長等參數。在Loon 氣球的研制過程中發現,目標可達性是制約其應用的重要因素。當可達能力弱時,只能通過多平臺協同工作來進行,這將加劇任務復雜度和任務成本。為此,Loon 氣球在項目后期提出了弱動力控制方法。結合Loon 氣球在可達性能力設計和分析方面的工作,應重點關注2 個方面:一是兼顧總體性能的電推進系統設計,包括設備選型、安裝方式、轉向設計、推進能力需求等[50],應特別注意如果浮空器未采用流線性氣動外形,推進系統安裝位置會影響推進過程中的球體姿態,進而影響其推進能力;二是推進系統工作策略,應降低推進系統對儲能電池的能量需求,否則將使得智能平流層浮空器走向平流層飛艇技術途徑。
4) 自主飛行能力方面。自主飛行是智能平流層浮空器最主要的特征,是其有別于傳統高空氣球的根本。鑒于Loon 氣球在自主飛行方面的創新研究,應關注平流層浮空器在不確定風場環境中的自主導航與控制方法。可借鑒Loon 導航控制系統設置,根據任務類型進行功能的解耦與匹配。例如,對于單浮空器平臺,應根據其遠距離的快速抵達或近距離的區域駐留與航路規劃進行分別研究。同時,應結合大氣科學和人工智能的進展,利用再分析數據對智能控制算法進行充分的訓練和調優,構建適應于一定目標任務的控制器。
