基于時空軌跡信息的目標行為模式在線分類方法
2023-06-27 04:58:12姜喬文劉瑜丁自然孫順簡濤
航空學報 2023年8期
關鍵詞:一致性
姜喬文,劉瑜,丁自然,孫順,簡濤
海軍航空大學 信息融合研究所,煙臺 264001
在預警監視領域,隨著衛星、雷達、ADS-B(Automatic Dependent Surveillance-Broadcast)、AIS(Automatic Identification System)、聲吶以及高清攝像機等目標探測技術的快速發展,覆蓋天基、空基、岸基、海上甚至水下的多層次預警監測體系已經基本形成[1-3]。監視場景下的運動目標得到了清晰準確的檢測、跟蹤和關聯,形成不斷更新的目標時空信息,最終以時空軌跡的形式記錄下來。海量的時空軌跡數據在航空電子系統等目標信息處理中心不斷存儲和積累,其中隱含著大量規律性的信息和知識。基于數據挖掘中的聚類技術可以從海量的歷史數據中挖掘出目標的頻繁行為模式[4-6],但離線的數據分析不具備時效性,難以適用于態勢實時更新的預警監視場景。在預警監視系統中,實時地對未知身份目標的時空軌跡行為進行預測和判定是實現態勢感知的有效途徑。當前,行為判定多以人工處理方式為主,這不僅要求情報處理人員具備大量的先驗知識,同時消耗大量的時間和精力,效率低且準確性差。因此,如何實現系統智能化在線分析目標行為是當下預警監視領域亟待解決的問題,這對于提升信息處理效率、及時分析和預測目標行為意圖、輔助指揮員決策部署以及實現智能化態勢感知具有重要的現實意義。
近年來,國內外科研人員在目標行為模式分類方面開展了大量的研究工作[7-11]。趙竹珺和吉根林[12]對時空軌跡分類研究進展進行了詳細的總結,針對現有的軌跡分類算法的特點,從數據來源、分類器、特征提取方式等方面進行了對比分析,并對設計增量式學習算法建立軌跡分類器提出了展望。潘新龍等[13]針對預警監視和指揮決策需求,對現有的目標行為模式在線分類技術進行了總結與展望。曹衛權等[14]基于運動目標的區域分布,采用核密度估計和最大似然判決的方法對軌跡段進行分類。崔彤彤等[15]結合卷積神經網絡和長短期記憶網絡優勢學習船舶AIS軌跡特征,實現了船舶軌跡和類型的分類。Owens 和Hunter[16]針對視頻監控系統中檢測到的目標行為自動分類問題,采用自組織映射神經網絡對正常的軌跡特征進行學習,實現無模型軌跡分類和異常檢測。Bolbol 等[17]基于支持向量機構建分類推理框架,來解決GPS 數據在不同交通方式(汽車、步行、自行車、地鐵、火車和公共汽車)中的分類問題。Saini 等[18]采用粒子群算法融合軌跡的全局和局部特征,并基于圖方法對軌跡進行分類。Pan 等[19]采用多因素Hausdorff 作為軌跡相似性度量,通過構造一致性多類分類器對預警監視區域的頻繁行為模式進行在線分類。
雖然目前軌跡分類領域已有大量的研究,但現有方法依然存在以下幾點局限性:場景設置理想化,沒有考慮到離群軌跡對在線分類器的影響;分類模型復雜,導致時間消耗大,實時性有待提升;僅從空間位置信息度量軌跡相似性,忽略了航向和速度等特征。
本文針對上述軌跡分類方法的幾點局限性展開,主要貢獻如下:① 提出了歸納式一致性多類預測器(Inductive Conformal Multi-class Predictor, ICMP),兼顧分類和離群樣本檢測功能,并提高了訓練和在線檢測的效率;② 提出了時空Hausdorff 距離(Spatio-Temporal Hausdorff Distance, STHD)和定向時空Hausdorff 最近鄰不一致性度量函數(Directed Spatiotemporal Hausdorff Nearest Neighbor Nonconformity Measure, DSHNN-NCM),可以有效區分空間位置相似但運動速度和方向不同的軌跡;③ 提出了序貫時空Hausdorff 最近鄰歸納式一致性多類預測器(Sequential Spatiotemporal Hausdorff Nearest Neighbor Inductive Conformal Multi-class Predictor, SSHNN-ICMP),對預警監視場景下目標頻繁出現的行為進行在線學習和預測;④ 通過仿真和實測數據實驗證明了算法在目標行為在線分類準確性和實時性上的優勢。
1 一致性預測
1.1 一致性多分類器
一致性預測[20-21](Conformal Predictor,CP)(算法1)是一種基于Kolmogorov 隨機性理論轉導推理的域預測機器學習算法,該算法的前提是假設樣本是獨立和同分布的。首先在對測試樣本進行預測之前設定一個置信水平,然后對訓練樣本集和待測樣本序列進行隨機性檢驗,通過不一致性度量函數(Nonconformity Measure,NCM)計算待測樣本序列與訓練樣本集不一致程度的定量估計,最后將所有隨機性檢驗值超過置信水平的所有類別標簽作為域預測的結果。一致性預測算法的預測風險可控,但是預測結果可能不唯一。為了保證預測過程對每個測試樣本的獨立性,一致性預測過程采用在線學習方法,對于不同的測試樣本,訓練樣本集不斷更新。對于第k+1 個測試數據,前k個測試樣本已經被添加到訓練樣本集中,以此來在線擴展訓練樣本集。
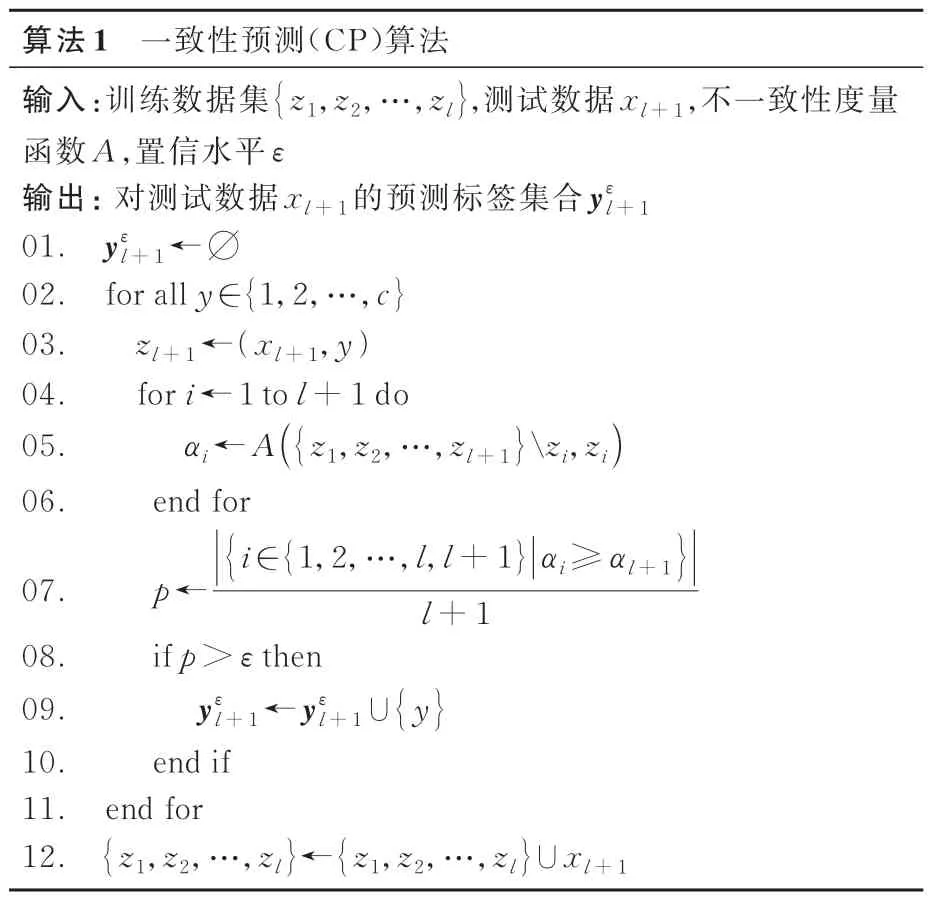
算法1 一致性預測(CP)算法輸入:訓練數據集{z1,z2,…,zl},測試數據xl+1,不一致性度量函數A,置信水平ε輸出: 對測試數據xl+1 的預測標簽集合yεl+1 01.yεl+1 ←?02.for all y ∈{1,2,…,c}03.zl+1 ←(xl+1,y)04.for i ←1 to l+1 do 05. αi ←A({z1,z2,…,zl+1}zi,zi)06. end for 07. p ←|{i ∈{1,2,…,l l,+l+1 1 }|αi ≥αl+1}|08. if p >ε then 09. yεl+1 ←yεl+1 ∪{y}10. end if 11.end for 12.{z1,z2,…,zl}←{z1,z2,…,zl}∪xl+1
在給定的置信水平ε的前提下,一致性預測器能夠預測可控風險下的類別。然而,對于同一個測試樣本,一致性多分類器可能得到幾個不同的類別標簽;除此之外,ε的取值對一致性預測結果至關重要,在很多應用中選擇合適的ε值是非常困難的,需要通過專家經驗來嘗試,不具有魯棒性,這在預警監視應用中是不能接受的。為了解決上述問題,Pan 等[19]提出了一致性多類分類器(Conformal Multi-class Classifier, CMC)(算法2)。該分類器可以保證預測的唯一性,而且在分類時不需要ε,解決了ε取值困難的問題,具有較強的魯棒性。
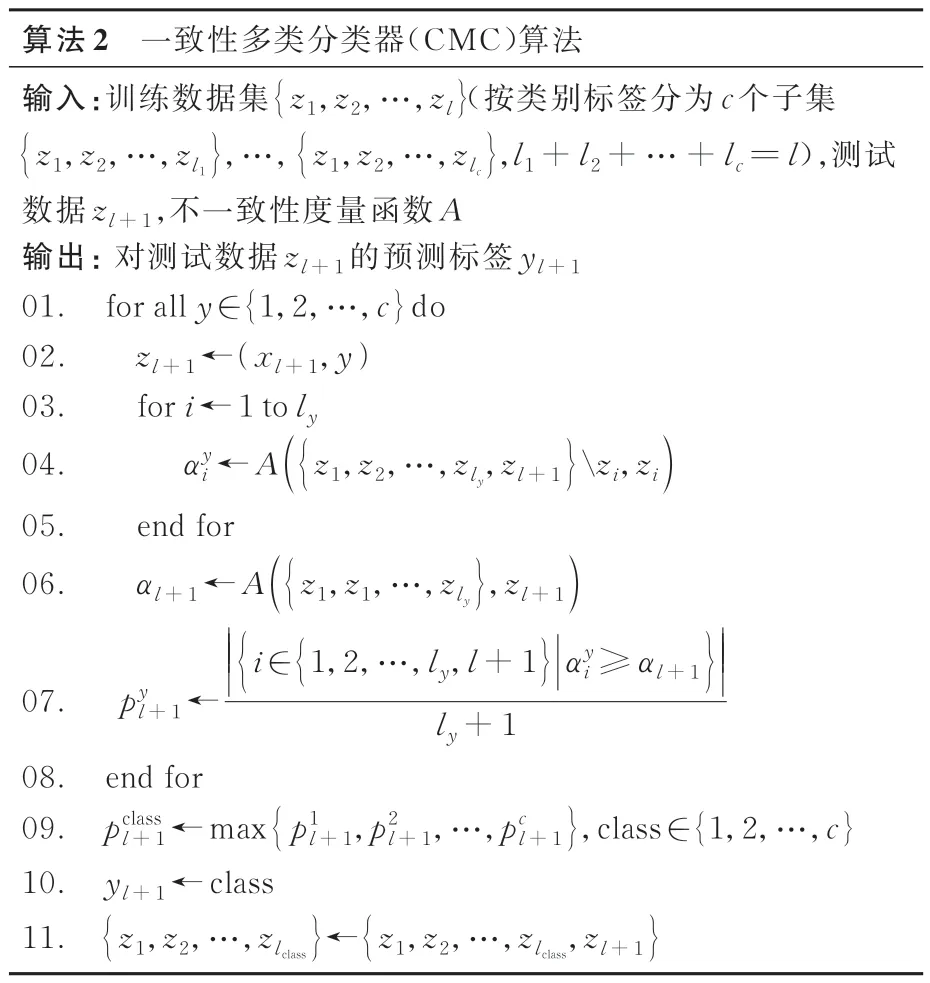
算法2 一致性多類分類器(CMC)算法輸入:訓練數據集{z1,z2,…,zl(}按類別標簽分為c 個子集{z1,z2,…,zl1},…,{z1,z2,…,zlc},l1+l2+…+lc=l),測試數據zl+1,不一致性度量函數A輸出: 對測試數據zl+1 的預測標簽yl+1 01.for all y ∈{1,2,…,c} do 02.zl+1 ←(xl+1,y)03.for i ←1 to ly 04. αyi ←A({z1,z2,…,zly,zl+1}zi,zi)05.end for 06.αl+1 ←A({z1,z1,…,zly},zl+1)|||||{i ∈{1,2,…,ly,l+1 }|αyi ≥αl+1}|||||07.pyl+1 ←ly+1 08.end for 09.pcl l+ass1 ←max{p1l+1,p2l+1,…,pcl+1},class ∈{1,2,…,c}10.yl+1 ←class 11.{z1,z2,…,zlclass}←{z1,z2,…,zlclass,zl+1}
1.2 帶有離群檢測的歸納式一致性多分類預測器
CMC 作為一種在線預測器,最突出的問題是在線計算的效率。在計算測試樣本集中每個樣本的不一致性度量值時,CMC 需要反復訪問和存儲樣本的相似度度量矩陣,耗時較長,因此僅適用于數據規模較小和低實時性要求的應用。除此之外,在實際預警監視場景中,目標的行為并不是都遵循已知的行為模式,會不斷出現無規則的離群軌跡。當采用CMC 對目標行為進行預測時,不論在哪一類型為模式中,離群軌跡經過不一致性度量會得到一個很小的p值,由于算法未對p值進行有效限制,從而導致將離群軌跡強行預測為某一種行為模式,這在預警監視應用中是不能接受的。針對上述問題,結合歸納式一致性 預 測[22](Inductive Conformal Predictor,ICP) 和一致性異常檢測[23](Conformal Anomaly Detector, CAD)的思想,提出了帶有離群檢測的歸納式一致性多分類預測器(Inductive Conformal Multi-class Predictor with outlier detector, ICMP)( 算法3)。

算法3 ICMP 算法輸入:訓練數據集{z1,z2,…,zl(}按類別標簽分為c 個子集{z1,z2,…,zl1},…,{z1,z2,…,zlc},l1+l2+…+lc=l,每個子集分為壓縮樣本集{z1,z2,…,zu1},…,{z1,z2,…,zuc}和檢驗樣本集{zu1+1,zu1+2,…,zl1},…,{zuc+1,zuc+2,…,zlc}),不一致性度量函數A,風險水平ε 訓練集{z1,z2,…,zl(}分為壓縮樣本集{z1,z2,…,zu}和檢驗樣本集{zu+1,zu+2,…,zl}),測試數據zl+1,不一致性度量函數A,風險水平ε輸出: 對測試數據zl+1 的預測標簽yl+1 01.for all y ∈{1,2,…,c} do 02.for i ←uy+1 to ly 03. αyi ←A({z1,z2,…,zuy},zi)04. end for 05.end for 06.for all y ∈{1,2,…,c} do 07.zl+1 ←(xl+1,y)09. αl+1 ←A({z1,z2,…,zuy},zl+1)|||||{i ∈{uy+1,uy+2,…,ly,l+1 }|αyi ≥αl+1}|||||10.pyl+1 ←ly-uy+1 11.end for 12.pcll+ass1 ←max{p1l+1,p2l+1,…,pcl+1},class ∈{1,2,…,c}13. if pcl l+ass1 <ε then 14. yl+1 ←0(Outlier)15.else 16. yl+1 ←class 17.{z1,z2,…,zlclass}←{z1,z2,…,zlclass,zl+1}
第一,針對在線計算效率的問題,基于歸納式一致性預測的思想來改善一致性多分類器的在線學習的實時性。將每一類訓練樣本集{z1,z2,…,zl1},…,{z1,z2,…,zlq},…,{z1,z2,…,zlc}劃 分 為 壓 縮 樣 本 集{z1,z2,…,zu1},… ,{z1,z2,…,zuq},…,{z1,z2,…,zuc}和檢驗樣本集{zu1+1,zu1+2,…,zl1},…,{zuq+1,zuq+2,…,zlq},…,{zuc+1,zuc+2,…,zlc}。壓縮樣本集是一個固定的集合,用來學習構建一個規則模型,不隨檢測樣本的更新而改變;只有檢驗樣本集隨檢測樣本的更新而改變,這樣既可以實時更新測試數據,又保證了計算效率。檢驗樣本集中樣本的不一致性度量值通過壓縮樣本集計算,對于第q類檢驗樣本集{zuq+1,zuq+2,…,zlq}中的樣本,其不一致性度量值
對于測試樣本zl+1,其不一致性度量值
每一類樣本中隨機性檢驗值的估計為
為了證明ICMP 在計算效率上的優勢,分析ICMP 和CMC 對其不一致性度量算法A的復雜度。當A應用于一個包含l個訓練數據和s個測試數據的數據集時,算法的整體復雜度可以表示為
式中:Atrain(l)表示A生成其通用規則所需的時間;Aapply表示將該通用規則應用到一個新測試數據所需的時間[22]。CMC 每完成一個測試樣本后都需要更新訓練樣本集,且不一致性度量值在每次測試時也需要不斷更新,其復雜度表示為
式中:c表示類別數;lq表示第q類訓練樣本集的樣本個數。而ICMP 通過固定的壓縮樣本集歸納得到檢驗樣本集和測試樣本的不一致性度量值,而且只需要訓練一次,不需要隨著測試樣本的更新而改變,其復雜度為
因此,當測試樣本規模很大時,ICMP 計算效率要遠優于CMC。
第二,針對一致性多分類器對離群樣本不敏感的問題,基于一致性異常檢測的思想,對算法增加了風險評估。首先設定一個風險水平ε,當最終的隨機性檢驗值確定后,將其與風險水平ε比較。當<ε時,則把測試樣本zl+1判定為離群樣本;當時,則對測試樣本zl+1進行正常的分類預測。這樣就很好地避免了離群軌跡對目標行為分類準確性的影響。
2 不一致性度量函數
2.1 時空Hausdorff 距離
時空軌跡數據是由若干個目標位置信息按時間順序構成的序列。在一段時間內預警監視系統中積累目標的所有時空軌跡集合表示為
式中:TR 表示時空軌跡數據集合;i為軌跡編號;n為軌跡總數;tri表示數據集中的第i條時空軌跡,即
其中:pi,k表示第i條軌跡中的第k個時空信息數據點;m表示軌跡tri中時空信息點總數,通常情況下,不同軌跡的時空信息點總數m不盡相同。
pi,k是一個包含目標時間和空間位置信息的向量,pi,k=[ti,k,li,k]。其中時間信息用ti,k表示,滿足ti,k<ti,k+1;空間位置信息用li,k表示,li,k既可以是二維空間中的位置點(xi,k,yi,k),也可以是三維空間中的位置點(xi,k,yi,k,zi,k)。
Hausdorff 距離[24-25](Hausdorff Distance,HD)是一種廣泛應用的軌跡相似性度量方法,它的優點在于可以度量整條軌跡的全局特征,當軌跡不完整時依然可以很好地進行相似性度量。傳統的軌跡Hausdorff 距離度量基于軌跡的空間位置信息,對于2 條軌跡tri和trj,定向Hausdorff距離的意義為軌跡tri中的位置信息點到trj中的位置信息點的最近距離中的最大值,表示為
式中:dist(li,k,lj,k)表示兩點之間的歐氏距離。在二維空間中,
在三維空間中,
傳統的軌跡相似性度量方法,如歐氏距離[26]、DTW[27]、Hausdorff 距離等,都是基于目標運動空間中的位置信息,未能有效地將目標的位置、速度、航向等多維特征信息進行融合,因此很難區分位置相近而運動特征存在較大差異的目標軌跡。而事實上,目標在運動過程中的位置信息是目標的速度、航向等特征在時間上積累的結果,盡管在空間維度中位置相近,但在時間維度上,運動特征不同的軌跡卻有著很高的區分度。因此,我們在目標運動空間的基礎上引入時間維度,在時空域中基于Hausdorff 距離度量軌跡的相似性,提出了時空Hausdorff 距離(Spatio-Temporal Hausdorff Distance, STHD) 。
在時空域中,空間維中的量綱是距離單位,時間維中的量綱是時間單位,兩者量綱的不同導致無法直接利用歐氏距離進行度量。考慮到距離的量綱與時間的量綱之間相差一個速度量綱,因此只需要在時間維度上乘上一個具有速度量綱的參量即可。設定該參量為整個數據集中目標運動的平均速度
式中:count(pi,k)表示軌跡tri中信息點的總數。
于是tri中每個軌跡信息點在時空域中的坐標就可以表示為
其中,式(13)用來表示二維空間中的運動目標,式(14)用來表示三維空間中的運動目標。
然后,在時空域中定義軌跡tri和trj之間的定向時空Hausdorff 距離為
定向時空Hausdorff 距離也不具備對稱性,因此定義兩者的較大值為時空Hausdorff 距離
如圖1 所示,盡管在空間維度上3 個運動速度和航向相異的目標軌跡Hausdorff 距離相近,但是在時空域中,可以準確地將運動特征不同的目標軌跡區分開。
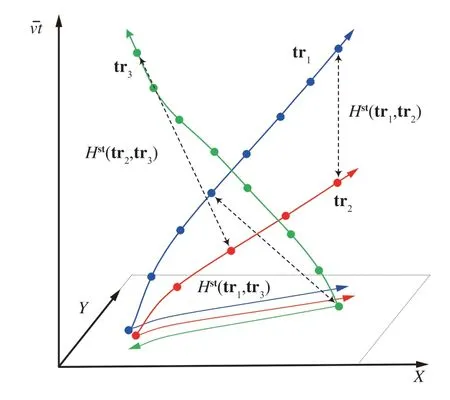
圖1 STHD 示意圖Fig.1 Schematic diagram of STHD
2.2 時空Hausdorff 最近鄰不一致性度量函數
不一致性度量函數(Nonconformity Measure, NCM)是一致性預測算法的一個重要組成部分,用來計算待測樣本序列與訓練樣本集不一致程度的定量估計。不一致性度量函數的構造通常基于機器學習的分類算法,其中應用最廣泛的是K 近鄰算法[24]
式中:表示測試樣本zi到與它同類別訓練樣本中第j近的距離;表示測試樣本zi到與它不同類別訓練樣本中第j近的距離。該定義假設具有相同標簽的樣本彼此很接近,而具有不同標簽的樣本彼此距離較遠。
由于ICMP 本質上還是一種多類分類器,因此并不需要考慮到其他類的距離。為了描述時空維度中目標軌跡的不一致性,我們結合STHD和K 最近鄰(K Nearest Neighbor, KNN)的思想,提出了定向時空Hausdorff 最近鄰不一致性度量函數(Directed Spatiotemporal Hausdorff Nearest Neighbor Nonconformity Measure,DSHNN-NCM)
式中:{tri,tri+1,…,trn}表示目標時空軌跡組成的壓縮樣本集;N (tri,{tri,tri+1,…,trn} ri,K)表示時空軌跡tri到與它同類別訓練樣本中定向時空Hausdorff 距離第K近的時空軌跡。在預警監視場景的應用中,K的值通常可以取2、3、4 或5。
3 目標行為模式在線預測方法
基于1.2 節提出的ICMP 和2.2 節提出的DSHNN-NCM,提出了帶有離群檢測的序貫時空Hausdorff 最近鄰歸納式一致性多類預測器(Sequential Spatiotemporal Hausdorff Nearest Neighbor Inductive Conformal Multi-class Predictor with outlier detector, SSHNN-ICMP),用于對預警監視場景下目標頻繁出現的行為模式進行在線學習和預測,主要流程如圖2 所示,具體實現步驟(算法4)如下:
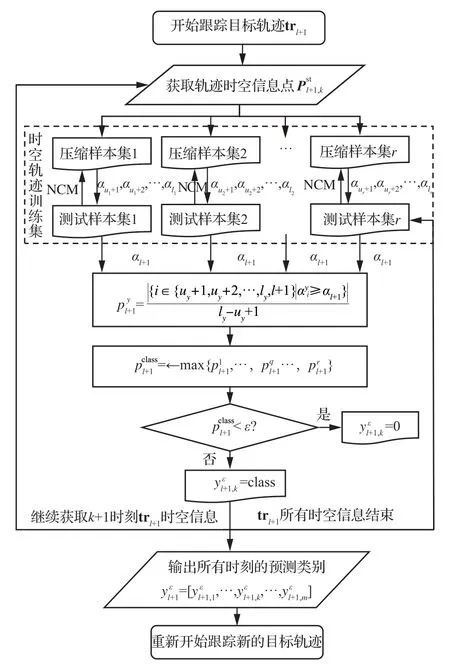
圖2 SSHNN-ICMP 流程圖Fig.2 Flow chart of SSHNN-ICMP
輸入
2) 測試軌跡trl+1,以按時間順序輸入的時空信息點更新trl+1,m為時空軌跡長度。
3) 最近鄰參數K。
4) 風險水平ε。

算法4 SSHNN-ICMP輸入 訓練集C1,C2,…,C(r分為壓縮樣本集C1c,C2c,…,Crc 和檢驗樣本集C1t,C2t,…,Crt),測試軌跡trl+1,最近鄰參數K,時空Hausdorff 距離向量μ1,μ2,…,μr,零向量h1,h2,…,hr,Q 風險水平ε輸出 更新所有pslt+1,k 后軌跡trl+1 的預測行為標簽集yεl+1 01.for k ←1 to m do 02.for all y ∈{1,2,…,r} do 03. for i ←uy+1 to ly do 04. αyi ←μiy-uy 05. end for 06. for g ←1 to uy do 07. hqg ←max{hst( pslt+1,k,trg),hqg}08. if g ≤K then 09. Q.insertElement(hqg)10. else if Q.maxElement()>hqg then 11. Q.removeMaxElement()12. Q.insertElement(hqg)13. end if 14. end if 15. end for 16. αl+1 ←Q.maxElement()17. Q.removeAllElements()|||||{i ∈{uy+1,uy+2,…,ly,l+1 }|αyi ≥αl+1}|||||18.pyl+1 ←ly-uy+1 19.end for 20.pcll+ass1 ←max{p1l+1,…,pql+1,…,prl+1}21.if pcl l+ass1 <ε then 22. ylε+1,k ←0 23.else 24. yl ε+1,k ←class 25.end for 26.yεl+1 ←{ylε+1,1,…,ylε+1,k,…,ylε+1,m}27.Cy tl ε+1,m ←Cy tl ε+1,m ∪trl+1 28.Update μ1,…,μq,…,μr
5) 時空Hausdorff 距離向量μ1,…,μq…,μr,其中μq是一個維度為(lq-uq)×1 的列向量,μiq表示第q類行為模式檢驗樣本集中第i條軌跡到壓縮樣本集軌跡中第K近的時空Hausdorff距離。
6) 零向量h1,…,hq,…,hr,其中hq是一個維度為uq×1 的列向量。
7) 空排序集Q。
輸出
每更新一個時空信息點pl+1,k后軌跡trl+1的預測行為標簽集其中表示離群軌跡。
1.2.2 各間隙調整正確。如秧針與導軌插口側面的標準間隙為1.3~1.7 mm,秧針和苗箱側面的標準間隙為1.5~2.5 mm。
步驟1對于軌跡trl+1在tk時刻更新的時空信息點,首先在第1 類行為模式的訓練集C1重復如下操作:
1) 通過時空Hausdorff 距離向量μ1計算檢驗樣本集中所有軌跡相對于壓縮樣本集的不一致性度量值
2) 計算更新的時空信息點相對于壓縮樣本集中所有軌跡的有向Hausdorff 距離并與前一個時刻進行比較,取兩者中的較大值作為該時刻軌跡trl+1子軌跡相對于壓縮樣本集中所有軌跡的有向時空Hausdorff距離
3) 更新空集Q,當Q中的元素個數超過K時,將所有的存入Q中;當g>K時,將當前的與Q中的最大值相比,若小于Q中的最大值,則將Q中最大的元素剔除,并將插入到Q中。
4)Q中最大的元素即為該時刻trl+1子軌跡相對于壓縮樣本集中所有軌跡的K 最近鄰時空Hausdorff 距離,由此計算軌跡trl+1子軌跡的不一致性度量值
之后清空Q中所有元素。
5) 計算的值
步驟2在剩余r-1 類的訓練集Cq中重復步驟1)~4)操作,計算得到
步驟3取中的最大值作為trl+1子軌跡在該時刻的一致性檢驗值
步驟4判斷trl+1子軌跡在該時刻的一致性檢驗值pl+1與風險水平ε的大小關系。若pl+1<ε,則判定軌跡trl+1為離群軌跡;若pl+1≥ε,則將trl+1子軌跡在該時刻的行為分類為中最大值所對應的行為模式。
步驟5持續對更新后的trl+1子軌跡進行行為判定,直到時空信息點不再更新。獲取trl+1整條軌跡在跟蹤過程中的行為模式標簽集
步驟6將存入相應類別的行為模式訓練集的檢驗樣本集中,并更新相應的時空Hausdorff距離向量。
4 仿真數據驗證分析
本實驗模擬了某預警監視區域中未知飛行器的10 種飛行行為,生成了含有10 種類別標簽的時空軌跡,我們在該數據集上實現了SSHNNICMP 算法,研究了算法的性能,并對實驗結果進行詳細的分析和討論。
4.1 仿真軌跡數據集
本節的時空軌跡數據集由Piciarelli 等[28]公開發表的軌跡模擬程序生成,可以模擬產生帶有類別標簽的規律性軌跡以及隨機的異常航跡。
用該程序產生二維空間中的目標軌跡數據,并人為添加信息數據點中目標的時間信息。該數據集共包含1 600 條時空軌跡,其中包括1 500 條規律性軌跡和100 條無規律軌跡,所有軌跡如圖3所示。規律性軌跡包含10 種行為模式,標簽1~3的行為模式在同一位置生成,以行為1 為參照,行為2 速度是行為1 的2 倍,行為3 與行為1 運動方向相反,每種行為有150 條軌跡;標簽4 和5 的行為模式在同一位置生成,行為5 速度是行為4 的2倍,行為4 有200 條軌跡,行為5 有100 條軌跡;標簽6 和7 的行為模式在同一位置生成,兩者運動方向相反,行為6 有200 條軌跡,行為7 有100 條軌跡;標簽8~10 的行為同理標簽1~3 生成。如圖4所示,其中箭頭表示目標的運動方向,相鄰軌跡點間隔的長短表示目標的速度大小。
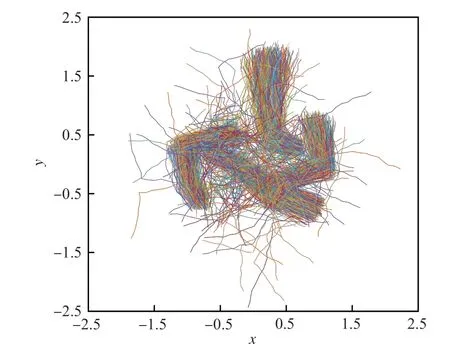
圖3 仿真軌跡數據集Fig.3 Plot of simulation trajectory dataset
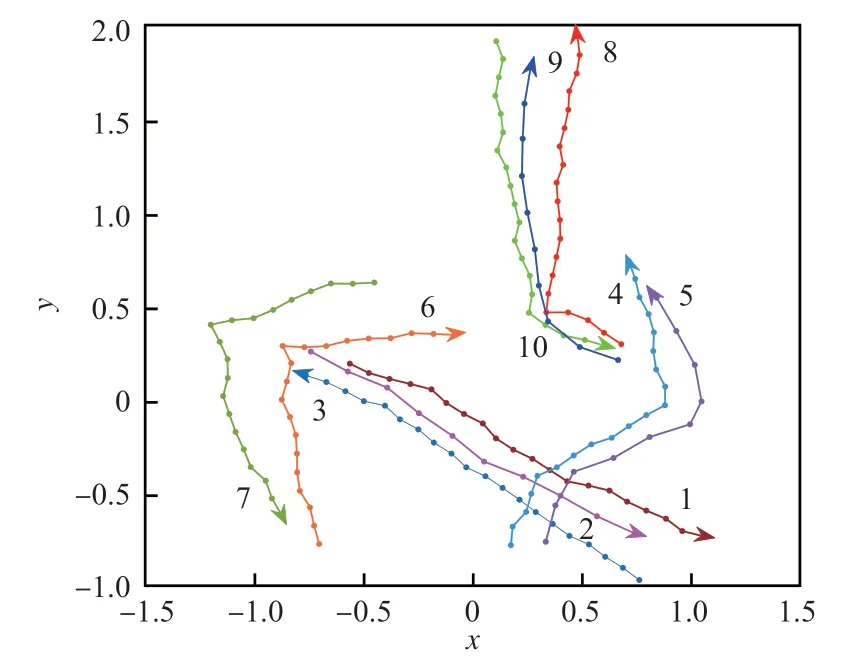
圖4 10 種行為模式Fig.4 Plot of 10 beheavior patterns
4.2 評價指標
本文采用精確率(Precision)、召回率(Recall)、F1-score、分類準確率(Accuracy)以及虛警概率(False Alarm, FA)對算法的性能進行評估。Precision、Recall 以及Fl-score 用來衡量一致性預測器在每一類行為模式上的在線分類性能。其中Precision 表示測試集中某種行為模式正確預測的軌跡個數占所有預測為該種行為模式軌跡總數的比例;Recall 表示測試集中某種行為模式預測正確的軌跡個數占該種行為模式的軌跡總數的比例;Fl-score 是Precision 和Recall的調和平均值。False Alarm 表示判定為離群軌跡的時空軌跡中具有正常行為模式標簽的時空軌跡的比例。Accuracy 表示所有行為預測正確的軌跡占測試集所有軌跡總數的比例,用來衡量在線分類和異常檢測在整個數據集上的整體性能。這些性能指標的計算方法如下:
4.3 驗證與分析
本實驗在仿真數據集上實現SSHNN-ICMP算法,并分別與一致性多分類器CMC 與不一致性度量函數HD-KNN、STHD-KNN 的組合進行對比分析。將整個仿真數據集隨機分成訓練集和測試集,每一種行為模式的時空軌跡中75%作為測試集,25% 作為訓練集,對于SSHNNICMP 而言,20%作為壓縮樣本集,5%作為檢驗樣本集。設置風險水平ε=0.01,K 近鄰參數K=2,3,4,5,按照上述比例隨機選取訓練集和測試集進行20 次重復實驗。采用Precision、Recall、F1-score、Accuracy、FA 以及訓練和測試消耗的總時間對算法的性能進行評估,如表1 所示,其中的Precision、Recall 和F1-score 為每次實驗所有行為模式類別間的平均值,表中的所有數據均為20 次重復試驗的平均值,表中每項評估值的最優結果用加粗表示。
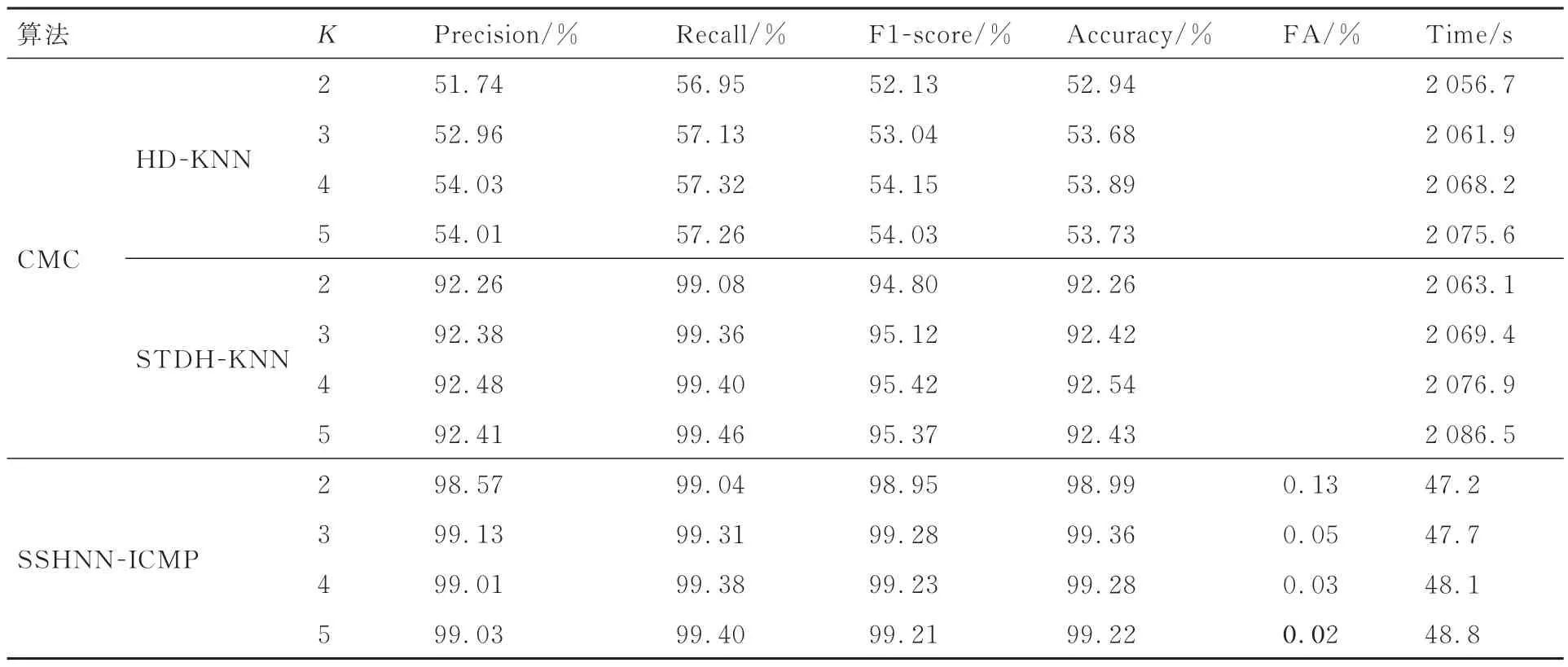
表1 仿真場景中算法性能比較Table 1 Comparison of algorithm performance in simulation scenario
從表1 中結果可以看出,SSHNN-ICMP 與CMC 的組合算法相比在Precision、F1-score 以及Accuracy 等評價指標上具有明顯的優勢,且預警率保持在較低的水平。STHD 與KNN 的NCM組合整體性能要優于HD 與KNN 的NCM 組合,因為前者具備分辨空間位置相似而速度和航向不同的行為的能力。在訓練和測試消耗的總時間上SSHNN-ICMP 要遠小于CMC 的組合算法。
為了進一步對比兩者在測試軌跡運行時間上的差異,將K=3 時SSHNN-ICMP 與STHDKNN-CMC 在每一條測試軌跡上的耗時變化繪制在圖5 中。從圖5 中可以看出,隨著測試軌跡數目的增加,SSHNN-ICMP 的運行時間幾乎保持在一個很低的值不變,而STHD-KNN-CMC隨著測試軌跡數目的增加運行時間幾乎呈線性增長。因此SSHNN-ICMP 的實時性更強,將更適用于數據集規模大的場景。
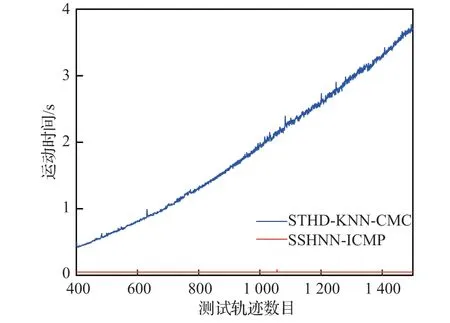
圖5 運行時間測試軌跡規模變化對比Fig.5 Comparation of running times dependent on size of test trajectory dataset
由于歸納式一致性預測的訓練集不隨在線檢測更新,因此壓縮樣本集的規模將決定著預測性能。為了研究SSHNN-ICMP 分類的整體性能與壓縮樣本集的關系,保持5%的數據集作為檢驗樣本集不變,將壓縮樣本集按照每一種行為模式從5%開始等比例增加,采用Accuracy 評估性能,通過多項式擬合的方法繪制曲線,如圖6 所示。
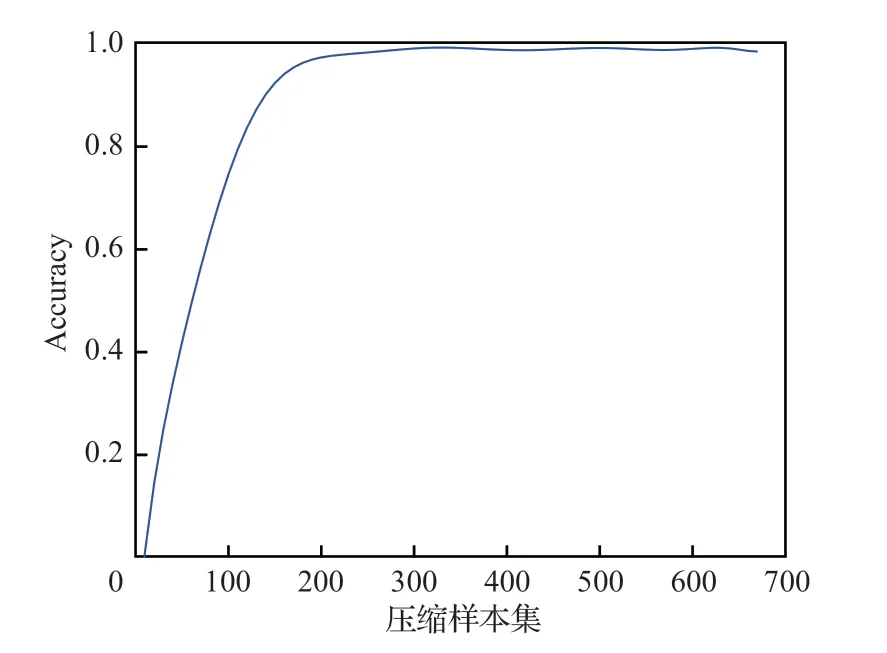
圖6 仿真場景中壓縮樣本集規模對算法分類準確率的影響Fig.6 Influence of compressed dataset size on Accuracy of algorithm classification in simulation scenario
從圖6 可以看出,當壓縮樣本集軌跡數據量較小的時候,Accuracy 隨著壓縮樣本集規模的增加而逐漸升高;當壓縮樣本集軌跡數量達到一定規模時,Accuracy 總是保持在一個較高的水平。因此,獲得足夠的壓縮樣本集是保證軌跡行為規律預測的準確性的前提。
5 實測數據實驗分析
5.1 實測軌跡數據集
本實驗選取了2006 年2 月某段時間美國舊金山機場雷達檢測出的部分航班飛行軌跡,該實測數據集總計有1 128 條時空軌跡。根據之前的研究工作[29]對該軌跡數據集進行規律挖掘并標記標簽,其中包括14 種行為模式和57 條離群軌跡。所有軌跡如圖7 所示,不同行為模式的軌跡用不同的顏色表示,離群軌跡用黑色表示。圖8展示了該場景下目標的14 種不同的行為模式。
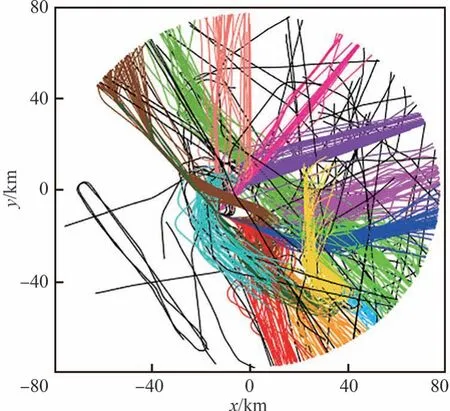
圖7 真實軌跡數據集Fig.7 Plot of real trajectory dataset
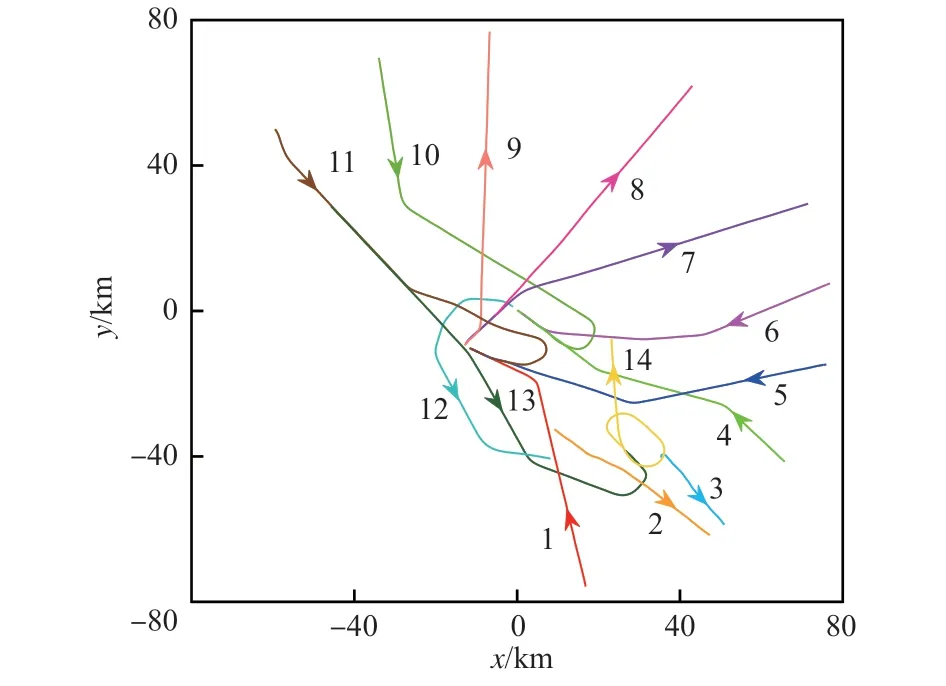
圖8 14 種行為模式Fig.8 Plot of 14 beheavior patterns
5.2 實驗與分析
本實驗在實測數據集上實現了SSHNNICMP 算法,并分別與一致性多分類器CMC 與不一致性度量函數HD-KNN、STHD-KNN 的組合進行對比分析。將整個仿真數據集隨機分成訓練集和測試集,每一種行為模式的時空軌跡中25%作為測試集,75%作為訓練集,對于ICP 而言,20%作為壓縮樣本集,5%作為檢驗樣本集。設置風險水平ε=0.01,K 近鄰參數K=3,按照上述比例隨機選取訓練集和測試集進行20 次重復實驗。采用Precision、Recall、F1-score、Accuracy、FA 以及訓練和測試消耗的總時間對算法的性能進行評估,如表2 所示,其中的Precision、Recall 和F1-score 為每次實驗所有行為模式類別間的平均值,表中的所有數據均為20 次重復試驗的平均值,表中每項評估值的最優結果用加粗表示。

表2 真實場景中算法性能比較Table 2 Comparison of algorithm performance in measured scene
圖9 展示了隨著壓縮樣本集規模增大Accuracy 的變化,通過多項式擬合的方法繪制曲線。從圖中可以看出,當壓縮樣本集軌跡數據量較小時,Accuracy 隨著壓縮樣本集規模的增加而逐漸升高;當壓縮樣本集軌跡數量接近一定數量時,Accuracy 總是保持在一個較高的水平。因此,在實際應用場景中,當壓縮樣本集軌跡數量足夠且適量時,即可保證算法具備良好的準確性和實時性。
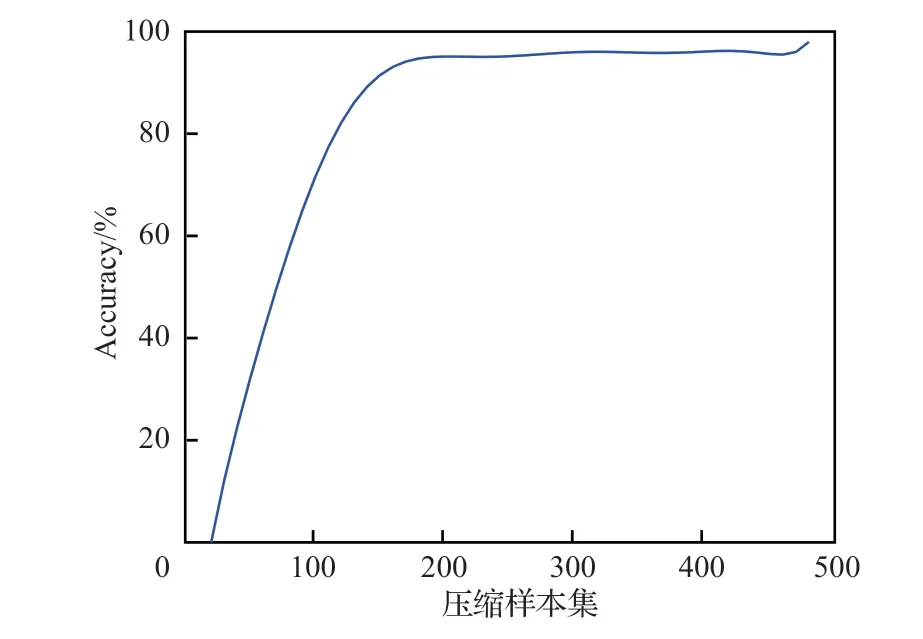
圖9 真實場景中壓縮樣本集規模對算法分類準確率的影響Fig.9 Influence of compressed dataset size on Accuracy of algorithm classification in measured scenario
6 結 論
本文針對實時預警監視需求,提出了基于時空軌跡信息的目標行為模式在線分析方法,進行了實驗分析和驗證,創新性工作包括幾個方面:
1) 提出了ICMP,解決了CMC 實時性不強、對離群軌跡不敏感等問題。
2) 提出了時空Hausdorff 距離概念,并結合KNN 構造了DSHNN-NCM,可以有效區分位置、航向以及速度特征不同的目標行為。
3) 提出了SSHNN-ICMP,可以在預警監視場景下對目標頻繁出現的行為進行在線學習和預測。
4) 分別在仿真飛行器軌跡和實測雷達軌跡數據中實現了SSHNN-ICMP,結果表明本文算法與CMC 的組合算法相比在Precision、F1-score 以及Accuracy 等評價指標上具有明顯的優勢,且實時性顯著提高。
基于上述創新工作,下一步將重點研究無監督條件下的目標行為模式在線分析方法。
猜你喜歡
遼寧教育(2022年19期)2022-11-18 07:20:42
公民與法治(2022年5期)2022-07-29 00:47:28
汽車實用技術(2022年9期)2022-05-20 05:51:26
教學考試(高考物理)(2021年5期)2021-11-08 10:31:22
歷史教學問題(2021年4期)2021-11-05 07:02:34
中醫眼耳鼻喉雜志(2021年1期)2021-07-22 07:38:14
裝備制造技術(2020年11期)2021-01-26 00:39:12
中國公共安全(2017年11期)2017-02-06 05:28:08
電測與儀表(2016年7期)2016-04-12 00:22:18
燕山大學學報(2015年4期)2015-12-25 02:19:49
