太陽能無人機線性自抗擾多環路能源控制
2023-06-27 11:35:36邵嘉琪張曉輝席涵宇劉子榮
航空學報 2023年10期
關鍵詞:方法
邵嘉琪,張曉輝,席涵宇,劉子榮
北京理工大學 宇航學院,北京 100081
太陽能電動力是航空領域實現“雙碳”戰略的重要技術途徑之一,太陽能無人機具有零排放、低噪聲等特點,是電動無人機長時滯空的有效方案,也是當前國內外的研究熱點[1-4]。由于太陽能本身的不連續性,通常采用鋰電池作為輔助能源以滿足儲能和補能需求[5-7]。鋰電池的引入,不可避免地帶來2個問題:① 太陽能電池與鋰電池2種電源如何合理地實現電力匹配;② 受鋰電池電壓鉗位,如何讓太陽能電池充分發揮最佳能效。因此,太陽能/鋰電池混合系統需要高效可靠的能源管理與控制[8],以確保太陽能無人機能源系統高效穩定運行。
太陽能無人機能源系統管理的目標是提升能源系統利用效率,同時保證能源系統安全性和穩定性,為太陽能無人機高能效長航時飛行提供必要支撐。為使太陽能電池以最大可用功率輸出,最大功率點跟蹤(Maximum Power Point Tracking, MPPT)技術是能源管理系統的核心關鍵技術之一。傳統最大功率點跟蹤方法有擾動觀測法、增量電導法和爬坡法等[9-11],近年興起了一些智能優化的方法,如模糊邏輯控制方法、神經網絡方法、以及粒子群優化方法等[12-15]。然而,以上方法僅以開環形式獲得太陽能電池最大功率點的參考電壓,要實現該參考電壓的實際調整,還需要反饋補償控制,從而構成最大功率點跟蹤的閉環控制,其典型控制架構如圖1所示[16]。傳統補償器控制方法有PID方法,它是一種基于實驗抑制擾動的控制方法,在不掌握系統模型條件下,對比例、積分、微分這3個參數進行調整,就可以使被控系統獲得較為滿意的控制性能,但PID方法只能被動地基于誤差反饋消除誤差,滯后于擾動的影響,易引起超調[17-19]。因此,有學者開始研究更穩定的補償器,Islam等[20]設計了一種雙環路3p3z型補償器,該補償器較PID更適合跟蹤參考電流和控制諧振,但該方法需要調整的參數較多,難以判定不同參數對系統性能的影響趨勢,參數調節困難。Avila等[21]采用滑模控制(SMC)方法對補償器進行控制,SMC具有較強的抗擾動能力且易于硬件實現,但SMC中出現的高頻抖振易導致開關元件出現較大損耗。
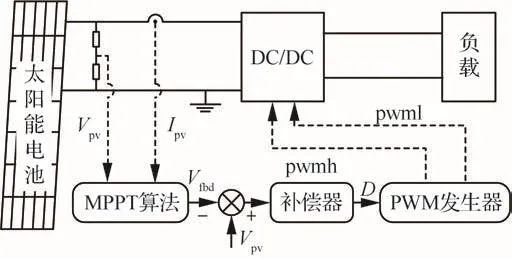
圖1 典型太陽能發電控制系統拓撲[16]Fig.1 Topology of solar power generation control system[16]
此外,為了匹配鋰電池的電壓和電流,能源管理控制器除了進行最大功率點跟蹤(MPPT模式),還要具備一定穩壓和限流功能(DC/DC模式),而單個穩壓或限流控制回路均無法滿足對鋰電池的管理需求。因此,邵陽等[22]在進行空間太陽能發電站能源管理時,采用了輸出電壓/電流串級雙閉環控制方法對母線進行穩壓和限流控制,并通過仿真驗證了方法的可行性,但其對MPPT模式與DC/DC模式如何平穩切換未給出具體方案,動態條件下該方法的實際應用效果也有待進一步驗證。由于最大功率點跟蹤控制易受傳感器采樣誤差及輻照動態改變等外部擾動影響,控制器會在不同工作模式之間頻繁跳變。為了避免工作模式在分界點反復切換振蕩,通常采用狀態回滯控制方法進行區間慣性控制[23-24],然而該方法難以適應輻照擾動較大的太陽能無人機。
作為一種抗擾動能力較強的方法,線性自抗擾控制(Linear Active Disturbance Rejection Control,LADRC)能夠在系統被明顯擾動之前提取擾動信息,并主動消除擾動,從而降低擾動對被控量的影響[25],在控制系統的適應性和魯棒性方面優勢突出。此外,LADRC僅有4個主要控制參數,各參數之間具有一定耦合關系,實際需要調節的參數僅有一個,調參方便,適合工程應用[26],為太陽能無人機能源管理的抗擾動控制提供了一種解決思路。
本文針對太陽能/鋰電池混合動力無人機能源系統的高能效控制問題,開展線性自抗擾多環路能源控制方法研究。考慮補償控制的抗擾動性,采用LADRC方法替代傳統PID方法,以提升系統的穩定性和快速響應能力。針對最大功率點跟蹤、太陽能/鋰電池電力匹配及鋰電池管理問題,提出MPPT環路、穩壓環路和限流環路聯合控制方法,實現多狀態量控制。針對工作模式頻繁跳變問題,引入競爭機制,實現工作模式平滑切換。最后,搭建了太陽能機翼所受輻照與飛行姿態耦合的太陽能/鋰電池混合能源試驗平臺,基于自主研發的能源管理控制器,驗證了所提控制方法的可行性和有效性。
1 自抗擾控制器模型建立
1.1 等效二階線性自抗擾控制器
太陽能電池配置的能源管理控制器采用降壓型DC/DC拓撲,如圖2所示,該拓撲具有2個工作狀態,功率開關S在脈寬調制(PWM)信號控制下交替導通和關斷。當開關S導通時,如圖2(a)所示,電源的輸出電流經過電感后,一部分為電容充電,另一部分為負載供電,此時電感的電動勢方向為左“+”右“-”。當開關S斷開時,如圖2(b)所示,由于電感電流不能發生突變,電感上的感應電壓方向為左“-”右“+”,以抑制其原狀態的改變。續流二極管此時產生正向偏置,為電感的續流提供了返回路徑,此時電感和電容同時為負載供電。降壓型控制器可實現輸入電壓到輸出電壓的線性變換,通過閉環調節功率開關的占空比維持恒定的輸出電壓。
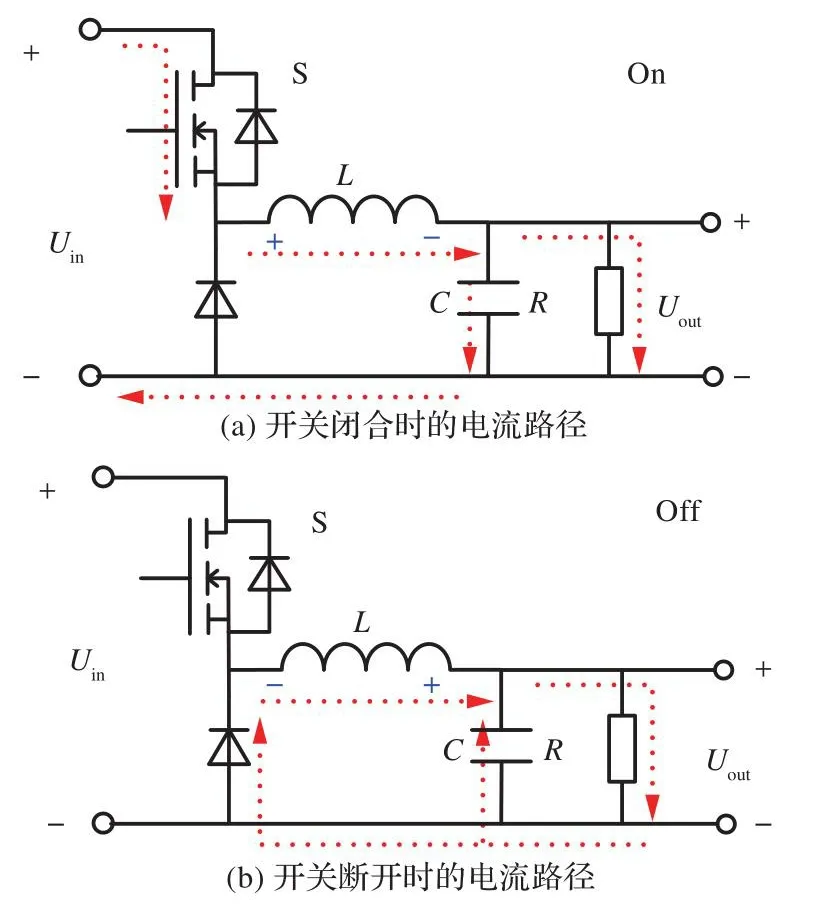
圖2 降壓型DC/DC變換器Fig.2 Topology of buck DC/DC converter
降壓型拓撲從控制到輸出的傳遞函數[27]如式(1)所示:
式中:Vi是輸入電壓;Vr是載波信號的幅值;R是負載電阻;C是輸出電容;L是濾波電感。
以降壓型拓撲作為被控對象,建立控制器模型,LADRC的控制回路如圖3所示,包括線性狀態誤差反饋控制率(Linear State Error Feedback,LSEF)、線性擴張狀態觀測器(Linear Extended State Observer,LESO)和被控對象Gp(s)。
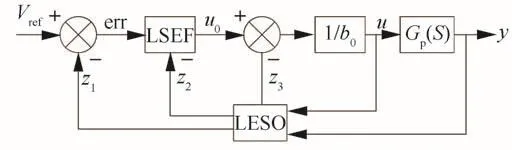
圖3 LADRC控制回路Fig.3 Control structure of LADRC
被控對象的微分方程可表示為
式中:y是輸出;u是控制量;b是增益,b的線性部分是b0;ω為擾動,是未知量;f是包含了外擾和內擾的總擾動。
選取狀態向量x=[?f]T,式(2)可轉換為連續的擴張狀態空間方程,即:
式中:
為提高系統的抗干擾性能,采用閉環控制實現狀態估計,根據輸出誤差控制狀態誤差,使得估計狀態和真實狀態之間的誤差逐步減小,對應連續線性擴張狀態觀測器為
式中:z→x,z是觀測器的狀態向量;L是觀測器誤差反饋增益矩陣。由于?可通過校正項可以估計出來,因而式(3)忽略求得L為
式中:ωo是狀態觀測器的帶寬。
由于,z1→y,z2→?,z3→f,那么由圖3可得:
聯立式(2)和式(6)可得:
二階LADRC本質上是雙積分器構成的串聯系統,采用全階LESO的LSEF控制器形式為
式中:r是給定值;z1和z2取自LESO的觀測器狀態;kp0、kd分別為比例與微分的放大系數。
因此可使得閉環傳遞函數成為一個無零點的二階系統,即:
經過參數化[27],取kp0=ωc2,kd=2ωc,ωc是控制器的帶寬。因此,LSEF控制器只與唯一參數帶寬相聯系,簡化了控制器設計。
1.2 LADRC離散化與參數設計
為了實現LADRC的數字化控制,需要將LESO離散化,采用歐拉法,即:
將式(10)代入式(3),有
式中:
為離散時間。
構造離散擴張狀態觀測器方程如下:
式中:Lc為離散擴張狀態觀測器的增益矩陣。離散觀測器極點與連續觀測器極點之間滿足:
b0由模型進行估計,由式(1)可得:
由式(2)和式(18)可得:
從圖3可知,LSEO可由式(12)實現,存在β、h、b0這3個參數,β可由式(17)計算,b0可由式(19)計算,h是離散時間。LSEF可由式(9)實現,僅存在未知量ωc,對于大部分工程對象,ωo約為ωc的3~5倍[28],故需要調節的參數只有控制器的帶寬ωc。
2 基于LADRC的多環路控制方法
太陽能無人機能源管理系統設計目標是既要實現太陽能電池高效發電,又要滿足鋰電池健康管理需求,為此本文設計了一種基于LADRC的多環路控制方法,其控制架構如圖4所示。該方法包括3個控制環路,即MPPT環路、穩壓環路和限流環路。MPPT環路用于實現太陽能電池的最大功率點跟蹤;穩壓環路實現輸出電壓的恒壓控制,防止無人機輕載時鋰電池過度充電;限流環路實現輸出電流的恒流控制,防止控制器過載及鋰電池充電倍率過大,3個環路可根據當前系統狀態協同工作。本文所采用的MPPT算法是增量電導法(Incremental Conductivity,INC),INC算法復雜度低、精度較高、穩定性好,是當前工程化常用方法[29]。
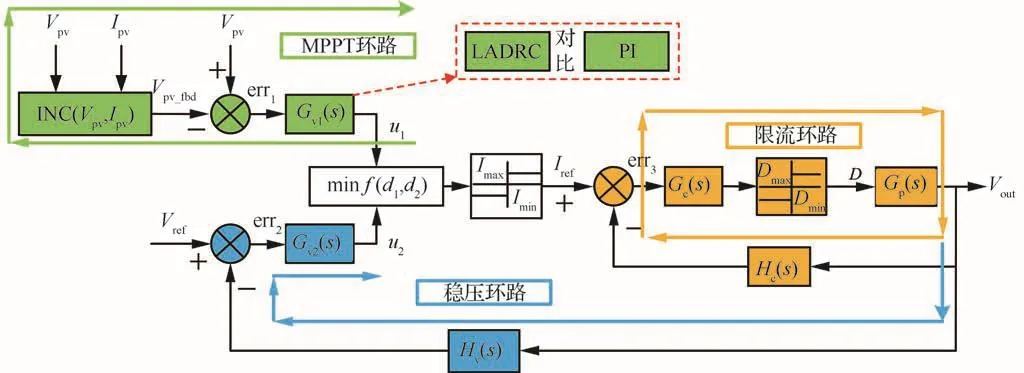
圖4 多環路控制結構Fig.4 Multi-loop control structure
2.1 多環路及運行機制
本文所提多環路控制方法如圖4所示,具體描述如下:
1) 在MPPT環路中,INC算法根據太陽能電池的電壓和電流給出光伏陣列目標工作點的電壓Vpv_fbd,作為該環路的參考量。Vpv和Vpv_fbd的誤差信號err1作為環路補償器Gv1(s)的輸入,產生MPPT環路控制量u1。
2) 在穩壓環路中,參考電壓Vref與反饋環節Hv(s)產生的誤差信號err2輸入補償器Gv2(s)后,產生穩壓環路控制量u2。
3)u1、u2經比較函數minf(u1,u2)得輸入量的最小值u,經限幅后產生電流環參考信號Iref。在限流電路中,參考電流Iref與輸出電流的反饋環節Hc(s)產生誤差信號err3,輸入電流環補償器Gc(s)后,產生占空比D,經限幅后的PWM信號作用于控制對象。
多環路運行機制如下:
1) 上電啟動及空載時,Vpv_fbd的初值取為0.98Vpv,MPPT環路的誤差err1為正值,控制信號u1將正向飽和,穩壓環路取得控制權限,控制器工作在DC/DC模式。
2) 小于光伏最大功率加載時,環路運行機制將保持上一個狀態,仍然處于DC/DC模式。
3) 大于等于光伏最大功率加載時,輸出電壓被拉低,誤差變大,u2飽和,MPPT環路取得控制權限,控制器工作在MPPT模式。
4) 只要MPPT環路有一次競爭優勢,輸出電壓和電流將發生明顯變化,使得u2上限飽和,Vpv_fbd與Vpv幾乎完全一致,MPPT環路依然具備競爭優勢。當輸出電流達到上限值Imax時,整個環路將變為單個電流環路,控制器為恒流輸出模式。
多環路控制方法實現既定目標的前提是電壓電流采樣頻率、INC調用頻率、各補償器調用頻率的合理匹配,本文設計采樣頻率為50 kHz;電流環作為整個環路的內環,運行頻率設計為20 kHz;MPPT環路和穩壓環路作為外環,運行頻率設計為10 kHz。
2.2 單環路動態響應測試
為了測試LADRC方法和PI方法在不同工作模式下的控制效果,分別對LADRC方法和PI方法的單環路進行動態響應測試,所獲得的測試結果和控制參數可為多環路測試方案設計和調參提供參考。
MPPT環路測試時,控制器實現最大功率點跟蹤。測試工況如表1所示,表中Voc為太陽能電池開路電壓;Isc為短路電流;Vm為最大功率點電壓;Im為最大功率點電流。按照LADRC控制器的參數整定方案,確定ωo=5ωc,由式(19)可確定b0=0.8×1010/3.3;ωc為唯一需要調整的參數,經調試選取最優的ωc=1.5×103。穩壓環路測試時,控制器工作在DC/DC模式,實現穩壓,測試工況如表1所示,經調試選取最優的ωc=1.5×103。
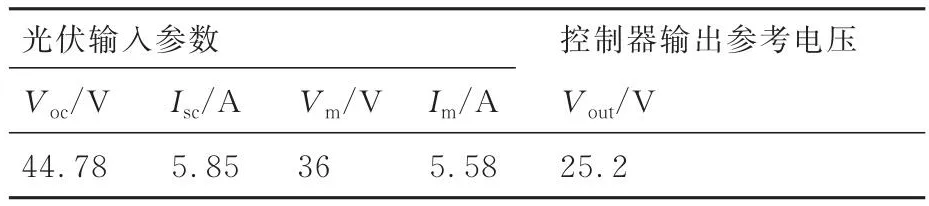
表1 動態響應測試工況參數Table 1 Parameters of dynamic response test
采用表2所示的控制參數,對不同方法控制的單環路進行動態響應測試,結果如圖5所示。其中,單個MPPT環路測試結果如圖5(a)所示,LADRC方法和PI方法控制的最大功率點跟蹤時間分別為1.6 s和2.8 s, 相比PI方法,LADRC方法使最大功率點跟蹤速度提升了約43%。在上電的瞬間,PI方法控制的輸出電壓略有震蕩,且響應速度較慢,而LADRC方法控制的輸出電壓無震蕩,且響應速度較快。單個穩壓環路測試結果如圖5(b)所示,LADRC方法和PI方法的動態響應效果無明顯差別。
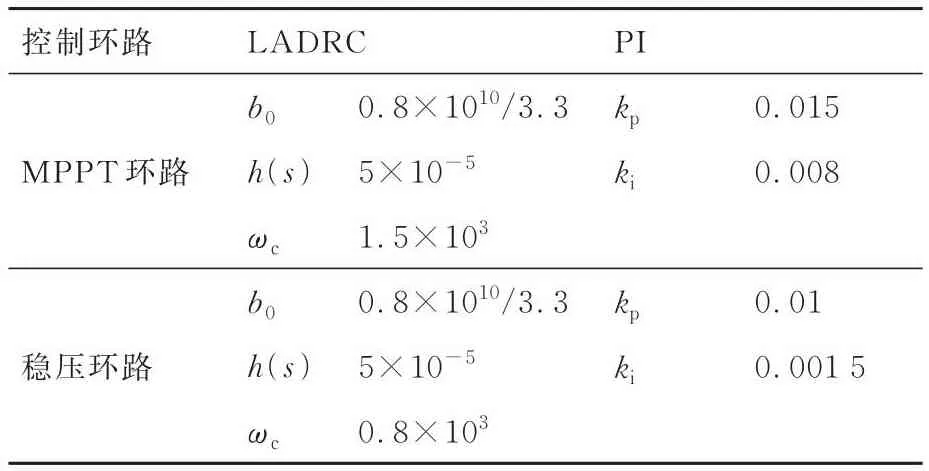
表2 單控制環路參數Table 2 Parameters of single-control loop
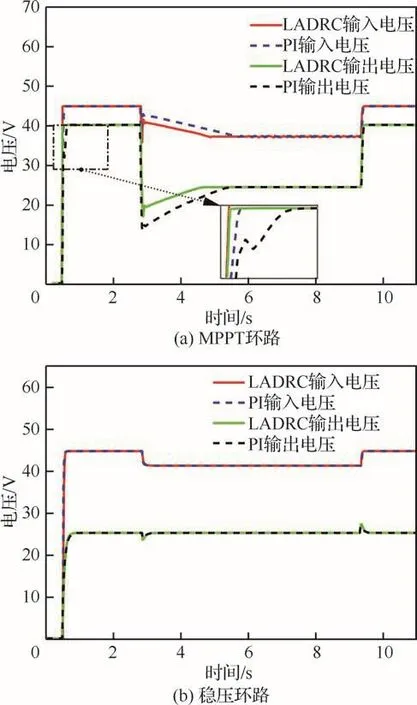
圖5 單環路動態響應測試Fig.5 Dynamic response test of single-control loop
2.3 多環路動態響應測試
在太陽能無人機實際飛行中,能源管理控制器既要實現最大功率點跟蹤,又要實現穩壓功能以匹配儲能鋰電池,避免其過度充電。因此,要同時運行MPPT環路和穩壓環路,為了測試所提LADRC多環路控制方法的有效性,以及相對于PI方法的優勢,本節對不同方法的多環路進行動態響應測試。
由單環路測試結果可知,LADRC方法在最大功率點跟蹤時有顯著優勢,輸出穩壓控制效果與PI方法無明顯差異,因此設計2種控制方案,方案1用LADRC方法控制MPPT環路,用 PI方法控制穩壓環路;方案2MPPT環路和穩壓環路均用PI方法控制。對兩種方案進行對比測試,同樣采用表1所示測試工況。
控制器的工作模式標志通過CAN通信傳輸到上位機,工作模式為1時,控制器工作在DC/DC模式,工作模式為2時,控制器工作在MPPT模式。加載時,控制器輸出電壓低于參考電壓,控制器進行最大功率點跟蹤,在降載瞬間,輸出電壓高于參考電壓,控制器執行降壓功能,將輸出電壓穩定在參考電壓。采用表3的控制參數,對兩種控制方案進行測試,所得測試結果如圖6所示。
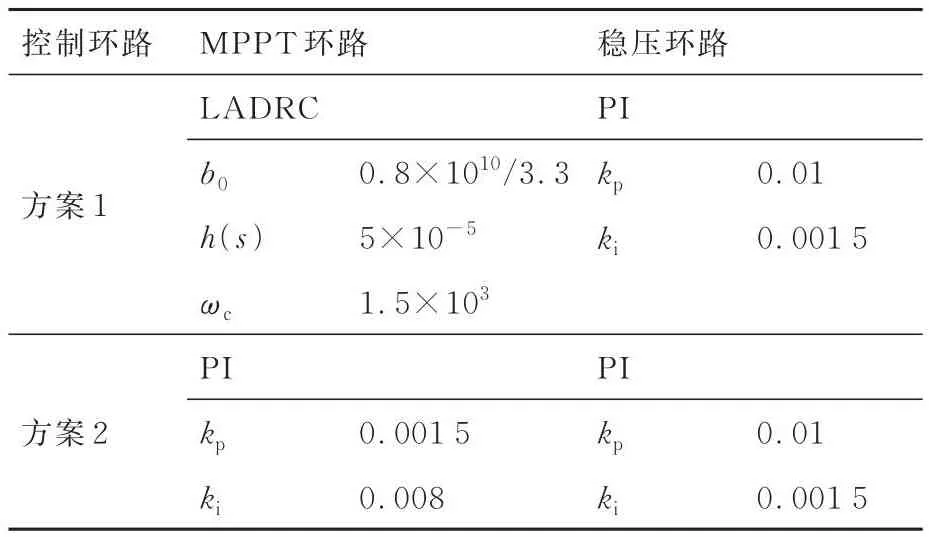
表3 雙控制環路參數Table 3 Parameters of dual-control loop

圖6 雙環路動態響應測試Fig.6 Dynamic response test of dual-control loop
如圖6(a)所示,方案1和方案2的最大功率點跟蹤時間分別為0.5 s和1.7 s, 相比方案2,方案1的最大功率點跟蹤速度提升了70%。由此可見LADRC方法明顯地提升了MPPT環路的最大功率點跟蹤效果。如圖6(b)所示,在加載瞬間,方案2的輸出電壓超調量較大,而方案1的輸出電壓波動幅度明顯減小。在降載瞬間,2種方案均出現較大的超調量,因此在下文中引入限流環路進行改善。
引入限流環路后,對于不同控制方法的三環路進行測試。同樣設計2種控制方案,方案1用LADRC方法控制MPPT環路,用PI方法控制穩壓環路和限流環路;方案2中MPPT環路,穩壓環路和限流環路均采用PI方法。
由于系統的傳遞函數改變,重新計算b0=0.006×1010/3.3,經調試LADRC控制參數選取最優的ωc=1.35×103,穩壓環路采用PI方法,主要控制參數如表4所示,測試結果如圖7所示。
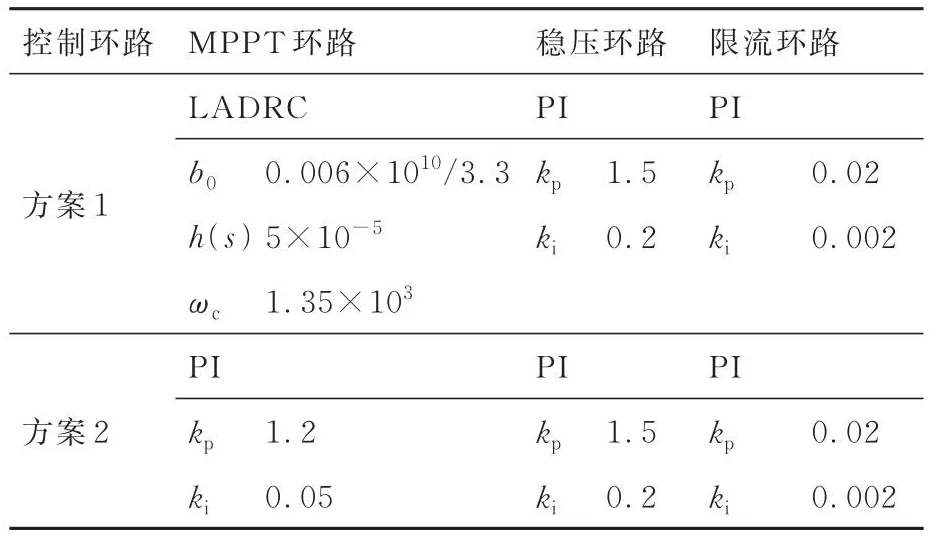
表4 三控制環路參數Table 4 Parameters of three-control loop
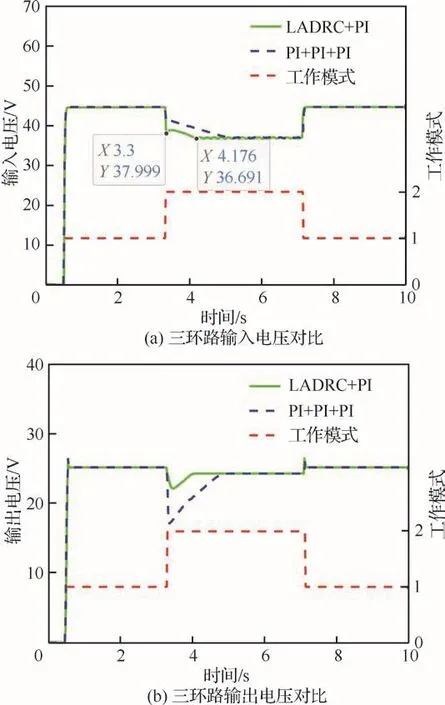
圖7 三環路動態響應測試Fig.7 Dynamic response test of three-control loop
由圖7(a)可見,方案1和方案2的最大功率點跟蹤時間分別為0.7 s和1.9 s,相比方案2,方案1的最大功率點跟蹤速度提升了60%,最大功率點跟蹤能力依舊較強。由圖7(b)可見,在加載瞬間,方案1輸出電壓的超調量遠小于方案2,在降載瞬間,方案1輸出電壓的超調量遠小于雙環路。因此,限流環路的引入不僅可以對輸出的電流進行限制,防止充放電倍率過大對鋰電池造成損傷,從動態響應測試結果來看,還能夠改善控制器動態響應特性,提高控制系統的穩定性和魯棒性,保證快速的最大功率點跟蹤。
3 太陽能無人機八邊形航線飛行模擬試驗
為了驗證所提LADRC多環路控制方法在飛行過程中的適應性、穩定性和有效性,本文搭建了太陽能/鋰電池混合能源試驗平臺模擬太陽能無人機八邊形航線飛行過程的動態輻照和載荷變化,開展能源管理控制效果試驗。
本文設計了如圖8所示的試驗平臺方案,基于該方案搭建了如圖9所示的試驗平臺,主要包括:太陽能模擬器,鋰電池,能源管理控制器、數據采集器(STM32)、動態載荷模擬器、電流傳感器以及上位機等。基于對華東電子測量儀器研究所的DC176301型號太陽能電池陣列模擬器進行二次開發,將太陽能無人姿態變化導致的機翼所受輻照變化引入到光伏發電控制之中,上位機2與模擬器采用TCP/IP通信協議進行通信,動態在線設定不同飛行方位機翼所受輻照度對應的太陽能電池工程參數,實現八邊形航線中8個方向上的太陽能機翼發電狀態模擬。鋰電池采用ACE Lipo電池,滿電電壓為25.2 V。能源管理控制器為實驗室自主研制的200 W級控制器,其性能參數如表5所示。數據采集采用STM32F7 67控制器,用于記錄電流電壓數據以及能源管理控制器的工作狀態,并傳輸到上位機2。動態載荷模擬器采用中鷹可編程電子負載ZY8715,通過上位機1模擬飛行過程載荷需求,將電力載荷信息發送至電子負載,生成實際電力載荷。光伏模擬器通過能源管理控制器與鋰電池并聯為負載提供能量,能源管理控制器采用LADRC方法控制MPPT環路,PI方法控制穩壓環路和限流環路。
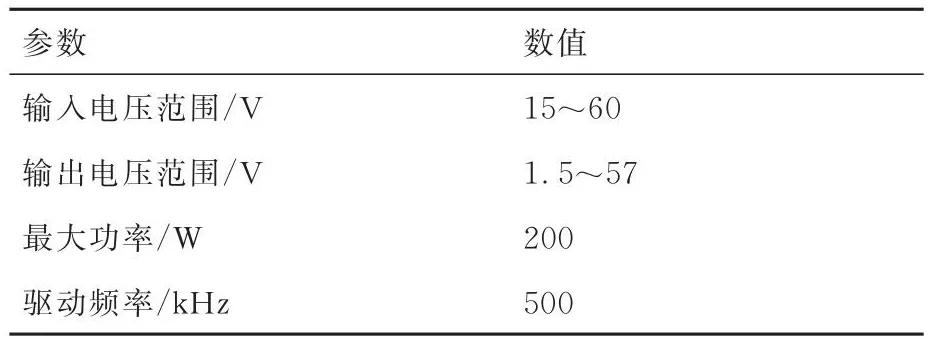
表5 能源管理控制器性能參數Table 5 Parameters of energy management controller
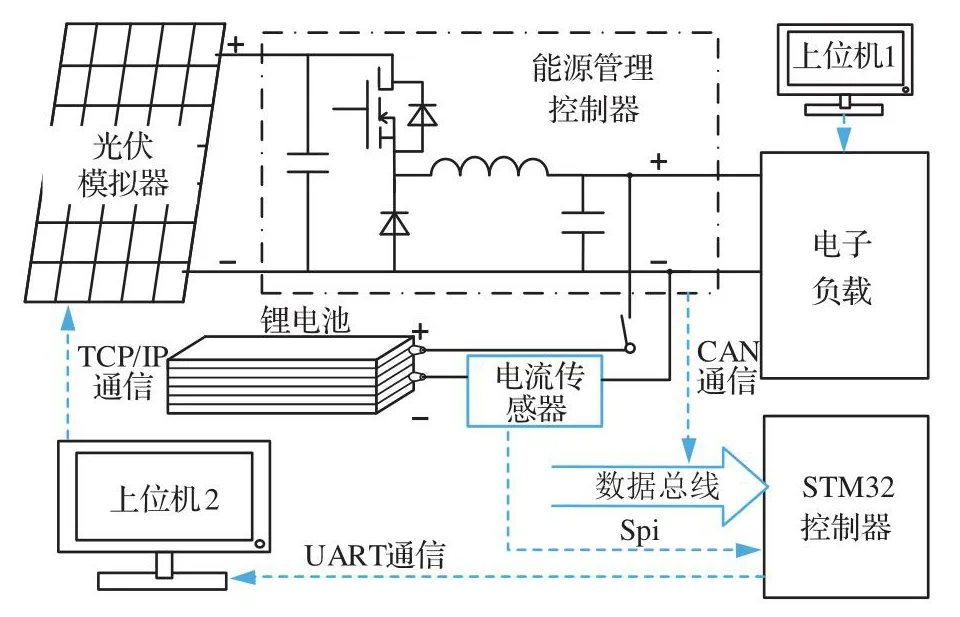
圖8 試驗平臺框圖Fig.8 Block diagram of test platform
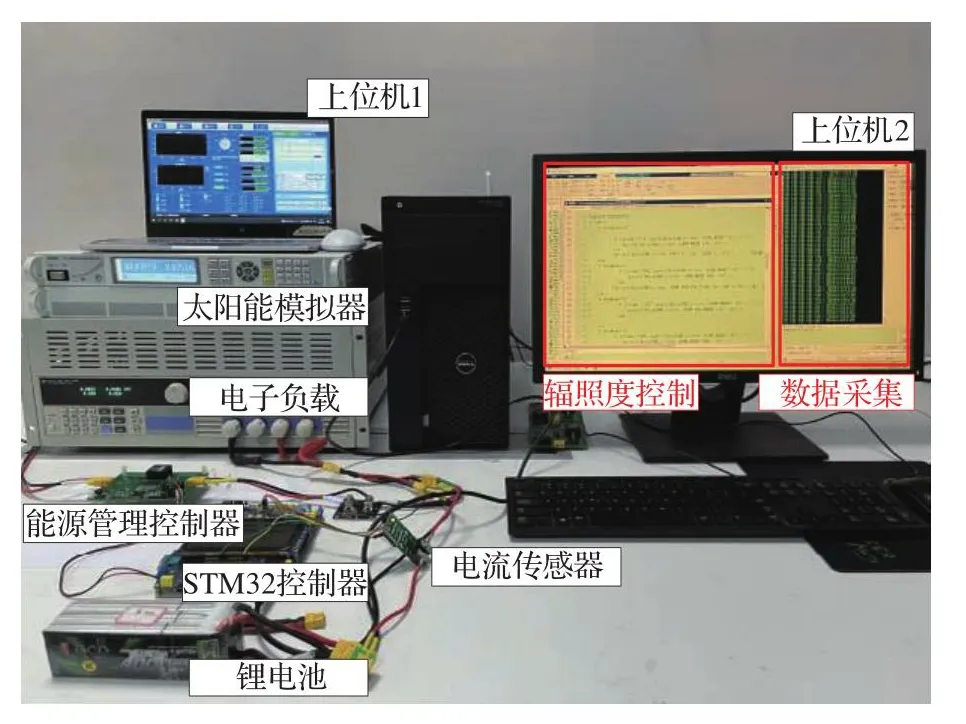
圖9 太陽能/鋰電池混合能源試驗平臺Fig.9 Solar cell/lithium battery hybrid energy test platform
本文設計了一種太陽能無人機典型任務剖面,如圖10所示,主要包括:爬升、巡航及下降階段,其中巡航段為等邊八邊形航線,以體現不同航向姿態下的輻照變化。整個飛行剖面分為10個狀態,其中0狀態表示爬升階段,俯仰角為15°,1~8狀態分別對應平飛階段八邊形航線的不同方位,俯仰角為5°,平飛高度為500 m,9狀態表示無動力滑翔下降階段,假定此時俯仰角不發生變化。
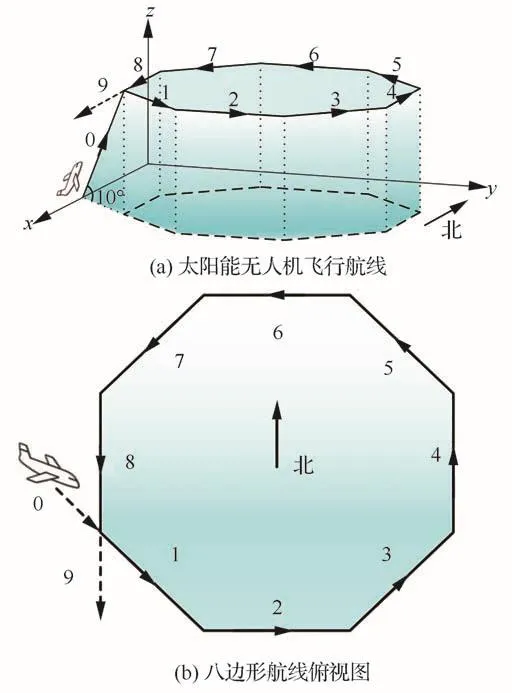
圖10 太陽能無人機八邊形飛行航線方案Fig.10 Flight route scheme of solar-powered UAV
上位機通過設定機翼所受輻照對應的太陽能電池的工程參數來控制太陽能模擬器,任意輻照和環境溫度下太陽能電池4個工程參數可由式(20)~式(23)計算得到[30]。
式中:補償系數取典型推薦值a=0.002 5(℃)-1,m=0.000 5(W/m2)-1,c=0.002 88(℃)-1,參考輻照強度取Sref=1 000 W/m2,參考溫度Tref=25 ℃,標準工況下光伏系統4個工程參數Isc、Im、Voc、Vm取值見表1。
參考北京緯度39.9°,選取一年中第172天上午10:00的日照情況,計算出無人機在不同方位的輻照度,如表6所示,表中Pm為不同輻照度下太陽能機翼的理論最大功率,即Im′與Vm′的乘積;Pmout為能源管理控制器最大功率點跟蹤后的實際輸出功率,跟蹤效率為Pmout與Pm的比值。
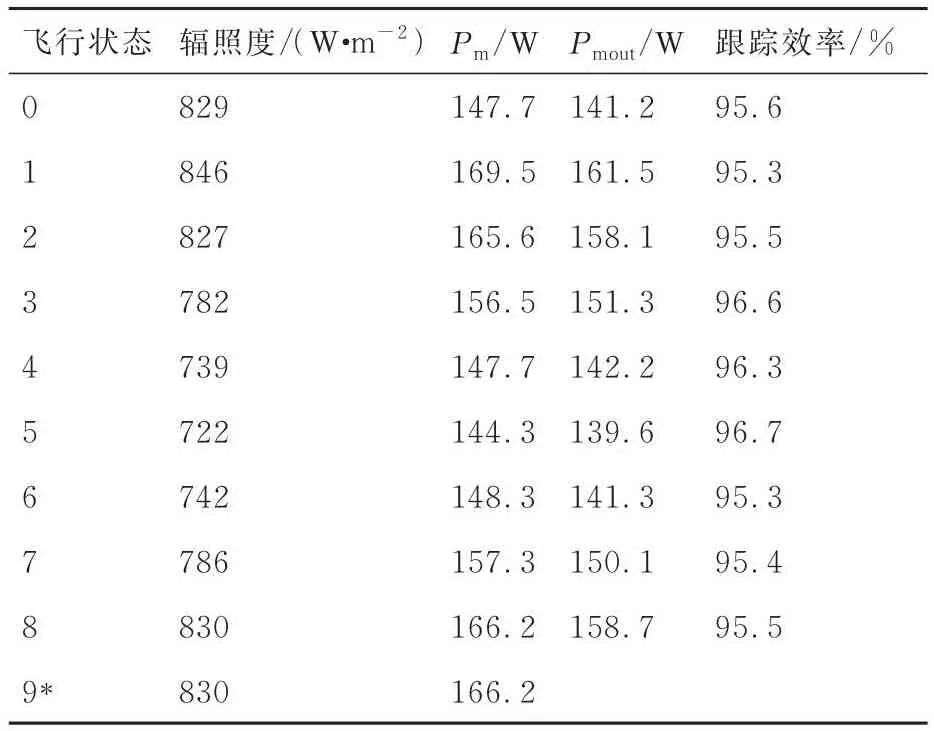
表6 不同飛行狀態輻照度及功率Table 6 Irradiance and power in different flight states
飛行過程的需求功率剖面如圖11所示,每個飛行階段的描述如下:①爬升階段:需求功率最大為557 W,光照充足;②巡航階段:飛行航線為正八邊形,平飛時需求功率為100 W,飛行方向改變需求功率增大為150 W;③降落階段:此時需求功率為0 W,無人機勢能轉化為動能,進行無動力滑翔。

圖11 負載功率剖面Fig.11 Power profile of load
太陽能無人機八邊形航線飛行模擬試驗結果如圖12~圖14所示。其中,圖12為飛行過程太陽能/鋰電池混合功率分配曲線,在大功率爬升階段,太陽能電池通過能源管理控制器以最大功率144.3 W輸出,鋰電池補充剩余需求功率;在小功率巡航階段,太陽能電池提供主要能量,平飛時負載功率小于Pmout,太陽能電池剩余功率為鋰電池充電。轉向時負載功率增大,當Pmout<150 W時,鋰電池為補充負載需求,會有短暫放電,巡航階段結束后鋰電池電壓接近滿電截止電壓25.2 V,幾乎充滿。在降落階段,飛行需求功率降為0 W,太陽能電池可用充電功率進一步增大,而為了防止鋰電池過充,能源管理控制器通過預設模式競爭機制,及時將工作模式調整為DC/DC穩壓模式,將輸出電壓穩定在鋰電池滿電截止電壓。整個工況優先使用太陽能電池,鋰電池起到能量補充和應對短時大功率波動的作用,實現了兩種電源優勢互補和能量高效利用的目標。
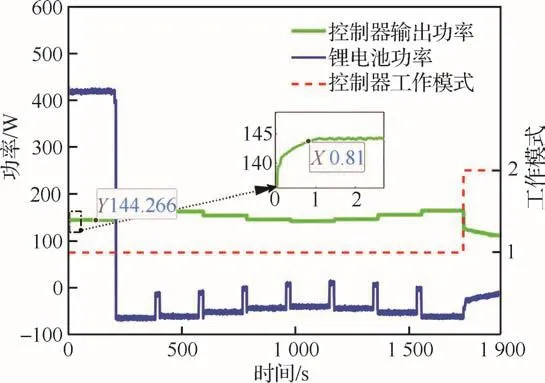
圖12 控制器及鋰電池功率Fig.12 Power of controller and lithium battery
圖13為鋰電池在整個過程中的電壓變化曲線,起飛時鋰電池初始電壓為25.2 V,處于滿電狀態,爬升階段鋰電池大功率輸出后電壓降到22.8 V,在巡航階段鋰電池充電完成,電壓回到25.2 V。當負載功率為0 W時,鋰電池接近滿電,達到輸出限制電壓,能源管理控制器切換至DC/DC模式,以鋰電池的滿電截止電壓輸出,防止鋰電池過充。
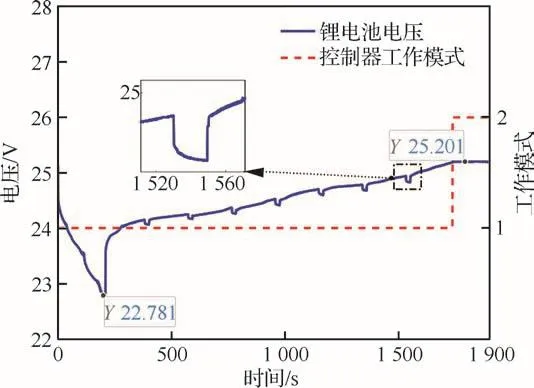
圖13 鋰電池電壓Fig.13 Voltage of lithium battery
圖14為整個過程中的電流曲線,也可以看出鋰電池的充放電情況,放電時電流為正,充電時電流為負,當鋰電池充滿后電流逐漸減小到0 A,從而有效地避免了鋰電池過充。
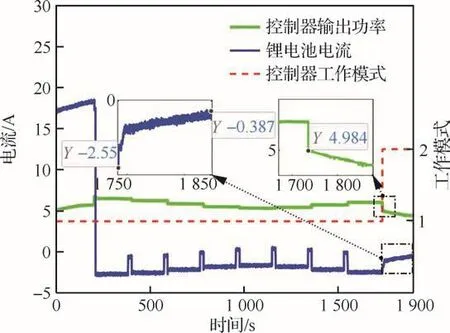
圖14 控制器及鋰電池電流Fig.14 Current of controller and lithium battery
整個動態飛行模擬過程中,跟蹤最大功率點的時間為0.8 s,控制器最大功率點跟蹤效率超過95%,控制器能迅速響應輻照度變化,能源管理過程無明顯震蕩,控制器工作模式切換平滑,由此可見,所提出的控制方法有效且實用。
4 結 論
本文提出了一種基于LADRC方法的太陽能無人機多環路能源控制方法,并開展了理論和實驗研究,所得結論如下:
1) 與傳統PI方法相比,LADRC方法調節參數只有一個,簡化了控制器的調試過程,與傳統PI方法相比,采用LADRC方法的控制器瞬態響應超調量較小且響應迅速。
2) 在引入LADRC方法控制MPPT環路后,單環路、雙環路和三環路控制的最大功率點跟蹤速度分別提升了43%、70%和60%。另外,三環路控制中,增加限流環路可明顯提升控制器的魯棒性和穩定性。
3) 在飛行模擬測試過程中,能源管理控制器采用三環路控制,其中,MPPT環路采用LADRC方法,在所設計的飛行功率剖面下,太陽能始終以最佳能效輸出,鋰電池可進行合理充電并動態補償需求功率,實現了太陽能/鋰電池混合能源的高效利用,保證了整個能源系統的穩定性和安全性。試驗過程中,能源管理控制器動態響應效果良好,最大功率點跟蹤效率達95%以上,并且能夠根據飛行載荷和電池電量狀態平滑切換工作模式。
猜你喜歡
中老年保健(2021年9期)2021-08-24 03:52:04
河北畫報(2021年2期)2021-05-25 02:07:46
中學生數理化(高中版.高考理化)(2020年2期)2020-04-21 05:33:04
兒童繪本(2020年5期)2020-04-07 17:46:30
兒童故事畫報(2019年5期)2019-05-26 14:26:14
Coco薇(2016年2期)2016-03-22 02:42:52
山東青年(2016年1期)2016-02-28 14:25:23
Coco薇(2015年1期)2015-08-13 02:47:34
小雪花·成長指南(2015年7期)2015-08-11 15:03:12
小雪花·成長指南(2015年4期)2015-05-19 14:47:56
