康復機器人系統數據通信技術應用現狀
2023-06-30 00:37:27吳偉銘孟巧玲倪偉喻洪流
上海理工大學學報 2023年1期
吳偉銘 孟巧玲 倪偉 喻洪流
摘要:為實現康復數據傳輸的及時性和數據使用的有效性,確保康復機器人能夠發揮智能化、個性化康復訓練功能,從康復機器人與其協同工作的人機交互系統之間采用的通信技術出發,對康復機器人數據通信技術的發展現狀在有線與無線兩個方面進行分類綜述。首先,總結了現有康復機器人通信技術的基本特點與應用方式。其次,基于準確性與實時性在通信方面的重要性,闡述并分析了案例中通信技術應用的局限,并結合現有技術提出解決方案。接著,總結了有線與無線通信技術在康復機器人應用上的適用性與優缺點。最后,基于現有技術與期望目標間的差距,提出了改善康復機器人通信技術的解決方案。
關鍵詞:通信技術;康復機器人;有線通信技術;無線通信技術
中圖分類號:R 496??????????? 文獻標志碼:A
Application status of data communication technology inrehabilitation robot systems
WU Weiming1,2,3, MENG Qiaoling1,2,3, NI Wei2,3, YU Hongliu1,2,3
(1. School of Health Science and Engineering, University of Shanghai for Science and Technology, Shanghai 200093, China;2. Shanghai Engineering Research Center of Assistive Devices, Shanghai 200093, China; 3. Key Laboratory of Neural-functionalInformation and Rehabilitation Engineering of the Ministry of Civil Affairs, Shanghai 200093, China)
Abstract: In order to realize the timeliness of rehabilitation data transmission and the effectiveness ofdata? use,? and? to? ensure? that? the? rehabilitation? robot? can? perform? intelligent? and? personalizedrehabilitation training functions, from the perspective of the communication technologies used betweenrehabilitation? robots? and? their? cooperative? human-computer? interaction? systems,? the? currentdevelopment? status? of? rehabilitation? robot? data? communication? technologies? was? categorized? andreviewed from both wired and wireless aspects. Firstly, the basic features and application methods ofexisting communication technologies for rehabilitation robots were summarized. Secondly, based on theimportance? of? accuracy? and? real-time? in? communication,? the? limitations? of? the? communicationtechnology? application ?in? the? case? were? described? and? analyzed,? and? solutions? were? proposed? inconjunction with existing technologies. Then, the applicability, advantages, and disadvantages of bothwired? and? wireless? communication? technologies? of? the? rehabilitation? robot? application? weresummarized. Finally, based on the gap between the existing technology and the desired goal, a solutionwas proposed to improve the communication technology of the rehabilitation robot.
Keywords: communication technology; rehabilitation robot; wired communication technology;wireless communication technology
康復機器人是以康復醫學理論為基礎,結合機器人技術進行康復訓練和康復輔助的設備統稱[1]。功能障礙患者可以通過康復機器人的輔助訓練與康復治療重塑神經功能,改善功能狀況,增強日常生活自理能力及社會交流能力等[2]。除此之外,康復機器人還能代替治療師工作,為患者提供重復性的康復訓練。治療師可通過上位機對康復機器人進行智能控制,并把實時記錄的康復訓練數據直觀地進行可視化呈現。智能化的康復機器人已成為康復醫院、社區、家庭等解決老年人康復醫療與助老助殘的一大助力[3]。
康復機器人數據通信一方面是下位機接收并解釋來自上位機的控制指令,然后控制系統執行指令完成康復訓練;另一方面,下位機將采集到的生物電信號、力或力矩等物理信號轉換為康復訓練數據傳輸給上位機進行記錄,并對記錄的數據進行有效處理[4],從而對康復訓練方案實施的有效性、患者訓練時的生理狀態變化等進行評估。康復機器人數據的獲取分為:數據采集、數據傳輸、數據的存儲和調用。數據傳輸作為獲取數據最為重要的步驟,對于存儲與調用采集的數據起著承上啟下的連接作用。
隨著康復機器人使用頻率和使用人數的增加,以及人機交互游戲與數據可視化呈現等功能的技術迭代加快,對康復機器人數據管理的要求也逐步提升。其中,最為關鍵的是保證數據傳輸的可靠性與實時性[5],這對于數據后續管理、康復機器人控制方式選擇等有著較為重要的影響。本文將對目前的康復機器人數據通信技術進行綜述,對不同的數據通信方式進行探討,以促進康復機器人人機交互體驗,為康復機器人提供切實有效的設計研究依據。
1康復機器人數據通信技術的分類
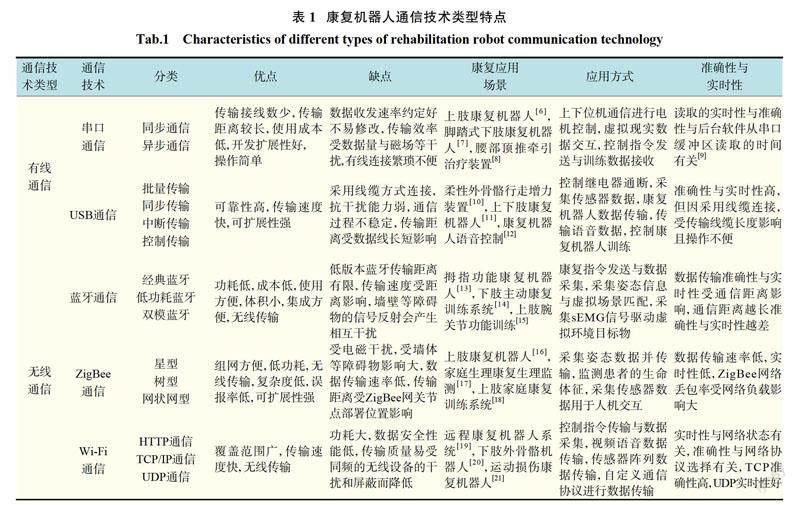
結合康復機器人人機交互系統具有的信息反饋與引導人主動參與信息交互的特點,患者或康復治療師需及時地將控制信息通過人機交互系統傳遞給康復機器人。康復機器人在接收控制信息之后將機器人信息、運動學、動力學等信號轉換為訓練信息、訓練數據等直觀內容,通過人機交互系統反饋給醫生或治療師,這些信息的反饋有助于對康復治療作出更有效的調整與規劃。這一過程中人機交互系統與康復機器人之間的信息反饋主要通過數據通信技術來實現,本文將數據通信技術分為有線通信(串口通信、 USB 通信)和無線通信(藍牙通信、 ZigBee 通信、 Wi-Fi 通信)。各通信方式的特點如表1所示。
2有線通信技術
2.1串口通信技術
串口通信(serial communication)指通過數據信號線、控制線和地線等在計算機和外設間進行按位傳輸數據的通信方式。這種通信方式傳輸接線數少,成本低,開發擴展性好,操作簡單,成為康復機器人常用的通信技術之一。串口通信在康復機器人領域的應用可分為3個部分:康復機器人電機驅動;康復機器人的虛擬現實交互;康復機器人控制指令的發送與訓練數據接收。
2.1.1康復機器人電機驅動
電機驅動是控制康復機器人機械臂進行康復訓練的核心,主要通過上位機與康復機器人控制系統之間建立串口通信,將控制指令傳輸至電機驅動器完成機械臂的控制。串口通信的實現需進行串行接口電路的設計。設計好的串行接口電路會將接收自 CPU(central processing unit)的并行數據字符轉換為連續的串行數據流進行發送,同時將接收的串行數據流轉換為并行的數據字符供給CPU 器件,通常會選擇使用 STM32單片機等進行串行接口電路的設計。劉修泉等[6]設計的上肢康復機器人采用串口通信的方式,從 PC 端將數據傳輸給 STM32控制器進行電機控制,從而帶動機械臂進行運動。但由于計算機的處理速度高于調制解調器的發送速度,這導致調制解調器的數據會被很快讀取,此時,串口電路模塊會向計算機發送中斷信息。同時, STM32串口電路緩存數據容量小的特點,會增快中斷信息的發送頻率,降低計算機的數據處理效率,導致延遲的增加,不利于數據的高速傳輸與電機驅動的控制。朱玉成等[22]、張旭等[23]、張繼國[24]都提出利用 FPGA ( field programmable gate array )功耗較低、容量較大、設計靈活性較高等特點進行串口通信電路的設計。 FPGA 在采樣速度、時序控制等性能上都優于 STM32串口電路,可以為高速信息傳輸提供較快的計算能力,實現與計算機之間的高速串口通信,也可以為高速信息傳輸提供較快的計算能力,實現與計算機之間的高速串口通信[25]。
2.1.2康復機器人的虛擬現實交互
虛擬現實交互可減少康復訓練中的枯燥乏味,提高患者康復訓練的積極性。串口通信可實現虛擬現實游戲與康復機器人之間的交互。河北工業大學設計的下肢康復機器人采用串口通信與基于 MFC(microsoft foundation classes)設計的虛擬現實康復系統進行交互,實行虛擬現實康復訓練系統與康復機器人之間的控制指令傳輸與數據交互[7]。虛擬現實交互對于數據的實時性反饋有著較高的要求,串口通信的傳輸速率主要受波特率和幀格式兩種參數的影響,常用 RS-232,RS485等串行接口傳輸,但傳輸時波特率一旦約定好就不易修改。而隨著虛擬現實交互的更新升級,版本更新前約定的波特率無法滿足更新之后虛擬現實交互數據量增大的傳輸需求。對此,孫夫文等[26]提出一種基于 FPGA 的串行通信速率自動檢測、自動設置的模塊,采用該設計,通信主機可發出重置通信速率的命令,此時,通信從機會開啟通信速率自測試與自設置功能,重新設定新的速率與主機建立通信鏈路。
2.1.3康復機器人控制指令的發送與訓練數據接收華中科技大學設計的上肢康復機器人通過RS232串口與下位機工控系統建立連接,實時將指令發送給上肢康復機器人進行反饋控制,同時將采集的訓練數據在 Windows交互界面上實現動態曲線繪制[27]。嚴澤宇等[8]通過在腰部推頂牽引治療裝置中開發基于PyQt平臺的上位機,通過 RS485串口建立上位機與主控板的通信,用于發送控制指令執行康復治療方案,同時采集數據進行康復效果分析。隨著當前無線通信技術的興起,串口有線傳輸受場地制約的缺點被放大。針對這一缺陷,楊怡婷等[28]提出 UART ( universalasynchronous receiver/transmitter)與射頻模塊( radio frequency)之間的數據通信,將 ZigBee 技術嵌入無線射頻模塊中,實現串口的無線數據傳輸,消除了串口通信有線傳輸的制約。
2.2 USB 通信技術
USB (universal serial bus)作為外部總線標準,用于規范電腦與外部設備的連接和通信。 USB 雖然也是用串行方式進行通信,但在通信時序和信號電平上和串口完全不同,在使用上相比串口傳輸速度更快,支持設備的即插即拔與熱插拔,功能應用范圍更廣。 USB 通信在康復機器人上的應用可分為:康復機器人與人機交互設備通信;數據轉換接口。
2.2.1康復機器人與人機交互設備通信
USB 接口在眾多硬件設備上都設有,因此,康復機器人在設計時也會選用 USB 接口作為數據傳輸的通用接口。山東大學設計的踝關節行走增力裝置可通過上位機與電路板中自帶的 USB 接口進行通信,實現繼電器的通斷控制,以及氣體壓力傳感器數據的采集與記錄[10]。谷士鵬等[11]設計的上下肢康復訓練機器人采用 USB 2.0接口與PC 機通信,開發時調用封裝好的函數實現傳輸數據的讀寫[29]。但直接通過 USB 將康復機器人上下位機進行連接限制了機器人的靈活性,特別是上位機采用 PC 端設計時不利于康復機器人的多場景應用。孫恒等[30]借助 USB 轉 NRF24L01模塊將上位機發送的指令通過無線傳輸至以單片機為核心單元設計的下位機系統,這樣很好地解決了 USB 有線傳輸的限制,使 USB 有線通信與無線通信有機地結合起來。
2.2.2數據轉換接口
由于串口通信使用的串行通信接口大多為 COM 口,在物理接口上多用于工控設備,對于設備接口有特殊要求,而此類接口的設備可以采用 USB 作為轉換接口的形式進行數據傳輸。大連海事大學采用 RS485-USB 轉換器實現3個編碼器與計算機的串行通信,通過 USB 轉換器連接計算機后與虛擬應用場景進行交互,實現被動式上肢康復機器人數據的接收和處理[31]。李少坤等[12]通過 RS232串口轉 USB 接入語音識別模塊作為獨立的子系統,與康復機器人控制系統軟件進行通信,通過語音識別控制系統進行數據交換,從而執行相應的康復運動。東南大學采用 USB 轉串口芯片 PL2303解決 PC 機沒有串行接口進行通信的問題,通過轉換之后的 USB 接口與 PC 端監護軟件通信進行生理數據的監測[32]。
USB 雖然可作為統一接口與康復機器人進行通信,但轉換之后還是以有線方式進行傳輸。雖然傳輸速度較快,但 USB 的抗干擾能力弱[33],通信過程不穩定,傳輸距離與穩定性受 USB 數據線長短與外界干擾影響較大,限制了其應用場合。牟奎霖[34]提出基于 NS1021延長器收發芯片的增強型 USB 傳輸方案,彌補了標準 USB 接口傳輸距離近和抗干擾性差的不足,同時也擴展了 USB 接口的使用范圍。馬萍[35]以 USB 總線接口實現 CAN總線控制的多個主節點同計算機進行通信,該設計使 USB 傳輸具有較強的穩定性、可靠性和實時性,且抗干擾能力較強。
綜上,有線通信技術更多地用于康復機器人與 PC 端進行通信的情況,一般利用 PC 端作為人機交互平臺的康復機器人都具有康復場所固定、康復機器人訓練時不可移動的特點,對于不考慮通信靈活性的設備可選擇使用有線通信。盡管有線通信在數據傳輸上較為穩定,但使得康復機器人不具備靈活性與便攜性。同時通信線纜的連接在物理空間上容易受到不確定外力的破壞導致通信中斷。為確保在康復機器人使用過程中不被破壞與干擾,設計中需要重點考慮康復機器人通信線纜位置的布置與保護。
3無線通信技術
3.1藍牙通信技術
藍牙通信技術是一種短距離無線通信技術,它可為固定的或移動的設備建立一種特殊的近距離無線通信環境[36]。藍牙通信主要利用一個藍牙設備搜索到另一個具有藍牙功能的設備,迅速建立起兩個設備之間的聯系,在控制軟件的操作下,實現數據傳輸[37]。藍牙通信在康復機器人上的應用可分為:康復機器人控制指令的發送與訓練數據接收;康復機器人的虛擬現實交互。
3.1.1康復機器人控制指令的發送與訓練數據接收
藍牙作為移動設備間的一種小范圍無線連接技術,可為康復機器人與其共同工作的人機交互設備之間進行控制指令的發送和訓練數據的接收提供方便快捷、低成本、低功耗的數據傳輸。重慶大學通過 Android 上位機與設計好的三自由度上肢康復機器人的藍牙設備連接實現康復訓練參數的發送[38]。哈爾濱工業大學采用 HC-06從機藍牙模塊將 Android 平板電腦與拇指功能康復機器人間建立通信連接,發送指令進行機器人控制與訓練參數設定,同時采集相關數據進行可視化顯示并保存[13]。胡杰[39]通過多模態下肢康復訓練輪椅上外接藍牙從機模塊與平板電腦藍牙模塊建立主從機藍牙通信,實現壓力傳輸與虛擬現實游戲交互訓練。
當前康復機器人采用的藍牙無線通信技術大多是基于藍牙4.0及以下版本進行開發的,雖然具有功耗和成本低的優點,但通信距離短的缺點,導致康復機器人與上位機通信時存在距離間隔越大數據傳輸的準確性和實時性越差的問題。而第五代藍牙的出現,將通信速度提高了一倍。通信速度的提高減少了通信所需時間與藍牙使用的功耗,同時,相較于藍牙4.2版本,數據承載量提高了8倍,通信距離也提高了4倍[40]。此外,藍牙5.0后加入了 Mesh 技術可以實現藍牙設備“多對多”的連接通信[41]。
3.1.2康復機器人的虛擬現實交互
藍牙通信用于虛擬現實交互是當前最為常見的方式,通常會使用藍牙手柄、鍵盤等設備進行虛擬現實游戲的操控,對于康復機器人中的虛擬現實交互也可以通過藍牙通信進行。李文肖等[14]設計的下肢主動康復訓練系統通過 Unity 3D 軟件平臺開發人機互動游戲[42],將采集到的傳感器姿態信息通過藍牙通信與虛擬康復場景匹配完成訓練,同時實現康復效果的評估。王洪等[15]針對上肢腕關節功能訓練,將表面肌電信號( sEMG)處理技術與虛擬現實技術結合,將采集的sEMG信號以藍牙通信的方式傳輸到上位機,用于驅動虛擬訓練環境中目標物的運動。
虛擬現實交互需保證數據傳輸的準確性與實時性,故在藍牙通信設計時應當避免使用低功耗藍牙( BLE )。低功耗藍牙雖然在使用上保證了低功耗,但是限制了數據的傳輸量,當數據量較大時就會出現數據包丟失的現象,不利于虛擬現實交互的進行。
3.2 ZigBee 通信技術
ZigBee 技術是一種近距離、低復雜度、低功耗、低速率、低成本的雙向無線通信技術,它的最大特點是可自組網[43]。一個 ZigBee 協調器可對應上萬個 ZigBee 終端,在通信范圍內, ZigBee 可通過動態路由的方式選擇數據傳輸路徑。當一條路徑因為網絡堵塞或建筑物阻擋等原因導致數據傳輸被中斷,動態路由結合 ZigBee 的網狀網拓撲結構則可以重新選擇另一條路徑直至數據傳輸完成[44]。ZigBee 通信在康復機器人的應用可分為:監測康復機器人使用狀態;家庭康復通信網絡的構建。
3.2.1監測康復機器人使用狀態
ZigBee 可在一定的監測區域內部署節點網絡通信,構成監測網絡,監測康復機器人康復訓練時人體與機器人的狀態。Braidot等[45]開發了一個名為 ZIMUED 的便攜式傳感器系統用于上肢康復機器人,通過 ZigBee 終端設備將采集的人體數據傳輸到 ZigBee 協調器上。蔣興松[16]通過 ZigBee 終端節點將肢體康復監測系統采集的病人姿態、關節活動度等數據傳輸給 ZigBee 協調器,再以串口連接 PC 將數據傳輸到 PC 端軟件上,由 PC 端軟件進行數據處理。
ZigBee 通信若用在康復機器人上會受限于 ZigBee 協調器的放置位置,且 ZigBee 數據傳輸需要以上位機作為中轉,限制了機器人使用的范圍。張毅等[46]通過設計 ZigBee-Wi-Fi 無線網關解決了不需要有專門與 ZigBee 協調器相連的上位機進行數據的中轉,這樣的設計對于協調器的放置位置不受限,在數據傳輸上更加靈活方便。另外,可忽視墻體等障礙物對于數據傳輸的干擾。
3.2.2家庭康復通信網絡的構建
數據傳輸可靠性高的特點可應用于遠程監控家庭、醫院等室內康復機器人的使用、患者康復生理狀態等情況[47]。Chen 等[17]通過 ZigBee 模塊構建家庭康復生理監測系統用于監測患者的生命體征, ZigBee 終端將監測對象的穿戴設備所采集的數據傳輸至 ZigBee 協調器上,實現對監測對象的跌倒和生理監測。李堯[18]針對中風病人設計了上肢家庭康復訓練系統,通過 ZigBee無線發送模塊將采集到的數據發送到 PC 端設備的外接ZigBee 協調器上, PC 端通過串口連接讀取 ZigBee 協調器上的數據用于人機交互和游戲驅動。
ZigBee 用于家庭康復通信網絡構建時,由于 ZigBee 通信頻段與 Wi-Fi 相同,這種情況下ZigBee 通信易受干擾。曾鵬等[48]針對無線局域網(WLAN)在同一區域共存將造成 ZigBee 網絡性能顯著下降的問題,提出了多信道干擾避免策略。通過應用多信道通信的方法提高 ZigBee 通信時信道切換的成功率,增強了 ZigBee 通信在 WLAN 干擾下的可靠傳輸。
3.3 Wi-Fi 通信技術
Internet 作為當今全球信息交互最活躍的領域,在利用計算機進行收集連接時,家居、醫療健康、教育、金融等領域的電子裝備也逐步融入互聯網技術,這有利于裝備之間經由互聯網進行資源共享[49]。基于 Wi-Fi 通信可以實現數據在局域網或者無線網之間的傳輸,最底層的 IP 協議與上一層的 TCP ( transmission control protocol)協議或 UDP ( user datagram protocol)協議的組合可實現網絡層與應用層之間通過接口進行數據流傳輸,從而進行數據交互。 TCP 是一種面向連接的、可靠的通信協議,適合通信質量要求較高的場景的應用,例如 http 傳輸、文件傳輸、 smtp 等,目前大部分的傳輸都是基于 TCP 協議進行的。 UDP 通信則提供了無連接的、實時性好的數據報服務,適合對網絡通信質量要求不高,但速度要求盡量快、更實時的情況,例如語音、視頻等。本文 Wi-Fi 通信在康復機器人上的應用介紹包括:康復訓練時視頻語音等數據交互;康復機器人控制指令傳輸與數據采集。
3.3.1康復訓練時視頻語音等數據交互
隨著遠程醫療概念的提出,遠程康復系統可為康復患者提供線上與康復醫師面對面的康復診療,成為康復機器人系統研究領域的一大熱門,通過 UDP 數據傳輸過程中延遲小、數據傳輸效率高的特點可進行遠程視頻康復診療的應用。王楠[19]設計的基于物聯網的遠程康復訓練機器人系統一方面將控制指令通過 TCP 傳輸發送至康復機器人設備,另一方面,視頻語音數據采集使用 UDP 協議進行傳輸,保證虛擬現實游戲交互的體驗。Tamez-duque等[20]設計了實時壓力皮帶傳感器系統,用于監測 Rehab Rex下肢動力外骨骼使用時的壓力,將采集的傳感器陣列數據通過 UDP 通信傳送至 GUI 軟件處理并顯示。UDP 通信雖然相較于 TCP 在傳輸數據前不需要建立連接,但是在數據傳輸上受連接的主機在線情況、網絡擁擠、阻塞等影響,數據傳輸可能會丟失,且無法監測數據傳輸的狀態,是一種可靠性不高的數據傳輸方式[50]。Google 提出的 QUIC ( quick udp internet connections)[51]協議是一種基于 UDP 并且融合了眾多其他協議優點的新型多路復用和安全傳輸協議。它具備連接建立迅速的優點,解決了隊頭阻塞、重傳模糊等問題,保證了網絡切換時業務的連續性。
3.3.2康復機器人控制指令傳輸與數據采集
TCP 通信在數據傳輸上可靠性較強,對于控制指令這類需要可靠傳輸的數據通信較為適用。賀玲玲[21]借助 TCP/IP 協議具備的跨網絡通信的特點,提出了基于運動損傷康復機器人的康復關節多數據交互協議(RJMIP),用以滿足康復機器人對運動時角度的數據傳輸誤差要求與多關節多數據交換需求。沈麗云等[52]基于 Android 平臺與 Wi-Fi 轉換器設計了上肢康復醫療機器人,通過 Wi-Fi 無線通信實現對康復醫療機器人本體肩關節、肘關節三自由度的驅動,同時將數據實時反饋至 Android 客戶端。
TCP 通信前需要建立連接,且需時時監聽連接是否正常,存在傳輸時隊頭阻塞、網絡切換導致連接中斷等問題,使得移動端的傳輸效率低、延遲高[53]。袁凱等[54]提出了一種聯合應用層糾錯、檢錯和重發機制的 UDP 傳輸方案,在提供低時延傳輸服務的同時也能保障報文的可靠性,該方案針對 TCP 不能保障實時性以及 UDP 不能保障可靠性的問題提出了解決方案。
綜上,康復機器人無線通信技術的使用根據不同的應用場景不盡相同,藍牙通信技術適用于便攜式設備與康復機器人近距離的無線數據傳輸; ZigBee 通信技術則適用于構建家庭等室內康復無線通信網絡; Wi-Fi 通信技術適用于遠程康復與數據傳輸量較大的無線通信。雖然無線通信技術的可移動性和不受傳輸線纜限制的特點,為康復機器人的使用帶來了極大的方便,但其對信號及通信雙方網絡連接狀態的要求較高,通信過程中若出現信號抖動、連接中斷等情況,均會對機器人控制、訓練數據接收、虛擬現實交互體驗等產生不同程度的影響。因此,在保證通信實時性的同時,如何確保連接的可靠性,需要進一步的研究。
4對未來康復機器人通信技術研究的幾點啟示
作為用于康復機器人控制、數據獲取、交互的通信技術,在設計時應當遵循“以人為本”的設計思想,從患者、康復治療師的角度出發,結合康復機器人使用特點,選擇適合康復機器人的通信技術,在確保數據傳輸的可靠性與實時性的前提下,提高康復機器人人機交互體驗。從現有技術與期望目標之間的差距,對康復機器人通信技術在功能實現、通信技術缺陷與改進辦法上進行了總結,在未來的康復機器人通信設計開發上可以參考以下幾個方面的策略。
a.復合通信策略。
單一的通信技術不能滿足復雜的人機交互功能的實現,通過在康復機器人設計過程中結合多種通信技術的使用,可以滿足多功能多需求的人機交互。如 ZigBee 具有的多節點接入的優勢結合 Wi-Fi 遠程通信的優點可以滿足患者居家康復與康復醫師遠程指導康復訓練的結合,實現康復方式更便捷化的目標。
b.便攜式設備無線通信。
隨著手機、平板電腦、智能手環等便攜式智能通信設備的興起,康復物聯網朝著輕型化、智能化的方向發展。基于智能手環與智能手機等小型化智能設備可結合自身功能在通信技術上選擇 NFC 無線通信、5G 通信等,NFC 近場通信具有的連接速度、傳輸速度快,功耗低等優點,可通過移動設備存儲的身份信息為康復機器人的使用提供身份確認康復訓練數據存儲,以確保康復機器人使用的安全保障與數據傳輸。5G 通信高速率、低延遲的優點可提供時時刻刻的遠程指導訓練。
c.高速安全通信。
隨著大數據、物聯網、康復醫療等行業的蓬勃發展,未來對于康復訓練數據的傳輸、讀取、上傳、下載等功能在保證準確性與可靠性的同時,對于傳輸的安全性有著更高的要求,未來在設計康復機器人人機交互系統時,對于通信數據的加密、校驗、存儲等都應按照法律法規加入相應的安全防范措施。
參考文獻:
[1]周媛, 王寧華.康復機器人概述[J].中國康復醫學雜志, 2015, 30(4):400–403.
[2]勵建安.人機共融, 天人合一——關于康復機器人應用與發展的思考[J].中國康復醫學雜志 , 2020, 35(8):897–899.
[3]喻洪流.康復機器人:未來十大遠景展望[J].中國康復醫學雜志, 2020, 35(8):900–902.
[4]李慧, 陳穎偉, 喻洪流, 等.下肢外骨骼康復機器人運動感知系統的研究進展[J].中華物理醫學與康復雜志 , 2021, 43(1):82–86.
[5]胡永利 , 孫艷豐 , 尹寶才.物聯網信息感知與交互技術[J].計算機學報, 2012, 35(06):1147–1163.
[6]劉修泉, 馬研, 宋愛國.基于物聯網遠程控制的上肢康復機器人系統研究[J].高技術通訊, 2015, 25(1):82–88.
[7]王秀丹.腳踏式下肢康復機器人虛擬場景建立與交互實現研究[D].天津:河北工業大學, 2015.
[8]嚴澤宇 , 喻洪流.腰部推頂牽引治療裝置控制系統研究[J].軟件導刊, 2021, 20(3):182–188.
[9]王衛峰, 姚正治, 劉金剛.基于定時器控制的串口通信軟件研究[J].微計算機信息, 2008, 24(1):254–255,303.
[10]谷雨橦.踝關節行走增力裝置的研制與性能研究[D].濟南:山東大學, 2019.
[11]谷士鵬 , 宋愛國.基于單片機的上下肢康復訓練機器人[J].南京信息工程大學學報, 2011, 3(5):408–413.
[12]李少坤, 江先志, 王增懷.康復機器人的語音控制及實現[J].信息通信, 2012(1):260–261.
[13]牟洋.拇指功能康復的外骨骼機器人研究[D].哈爾濱:哈爾濱工業大學, 2017.
[14]李文肖, 郭冰菁, 韓建海, 等.基于虛擬現實的下肢主動康復訓練系統[J].現代電子技術, 2019, 42(4):61–64,70.
[15]王洪, 趙翠蓮, 范志堅, 等. Android 平臺上肌電虛擬訓練系統設計與實現[J].計算機工程與設計 , 2015, 36(7):1966–1970,1980.
[16]蔣興松.基于無線傳感器網絡的肢體康復監測系統的設計與實現[D].成都:電子科技大學, 2019.
[17] CHENSK,KAOT,CHANCT,etal. Areliable transmissionprotocolforZigBee-basedwirelesspatient monitoring[J]. IEEETransactionsonInformation Technology in Biomedicine, 2012, 16(1):6–16.
[18]李堯.中風病人上肢家庭康復訓練系統設計與實現[D].青島:青島大學, 2014.
[19]王楠.基于物聯網的遠程康復訓練機器人系統[D].南京:東南大學, 2012.
[20] TAMEZ-DUQUEJ,COBIAN-UGALDER,KILICARSLAN A, et al. Real-time strap pressure sensor system for powered exoskeletons[J]. Sensors, 2015, 15(2):4550–4563.
[21]賀玲玲.基于康復機器人的多數據融合管理系統的研究[D].北京:北京石油化工學院, 2020.
[22]朱玉成, 董文學.基于 FPGA 的串口通信電路設計與實現[J].通訊世界, 2018(3):35–36.
[23]張旭, 彭月祥. FPGA 芯片的抗強電磁干擾串口控制器設計[J].單片機與嵌入式系統應用, 2021, 21(4):56–60.
[24]張繼國.一種利用 FPGA 實現串口通信的設計[J].電子世界, 2020(12):124–125.
[25] CHENZ,QINZT. Designandimplementedmotion controlsystembasedonFPGA[J]. MachineTool & Hydraulics, 2020, 48(12):42–47.
[26]孫夫文, 鄭采君, 劉昕卓, 等.基于 FPGA 串口波特率自適應功能的設計與實現[J].電子設計工程, 2019, 27(9):69–73.
[27]王硯秋.基于串口通信的人機交互系統的設計與實現[D].武漢:華中科技大學, 2011.
[28]楊怡婷, 歐陽名三.基于 ZigBee 技術的無線串口通信系統的實現[J].企業技術開發, 2018, 37(12):52–54.
[29] WANGYJ,SONGAG. Softwaredesignof aforce- feedbackvirtualdrivingtele-rehabilitationsystem[J]. JournalofClinicalRehabilitativeTissueEngineering Research, 2010, 14(35):6479–6482.
[30]孫恒 , 谷君豪 , 羅紅梅 , 等.無線遙控小車的設計與實現[J].汽車實用技術, 2020, 44(15):25–28.
[31]秦江偉.被動式上肢康復機器人虛擬現實控制系統開發[D].大連:大連海事大學, 2015.
[32]李曉鵬.面向老人康復訓練的遠程多生理參數監護系統[D].南京:東南大學, 2012.
[33]馬敬東, 陳明方.基于 USB 串口通信數據采集技術的實施[J].儀表技術與傳感器, 2007(2):68–69,75.
[34]牟奎霖.一種增強 USB 2.0延長傳輸方案和應用實例[J].電子產品世界, 2020, 27(10):63–64,69.
[35]馬萍.電力 USB 和 CAN 總線監控數據采集系統技術研究[J].電力系統裝備, 2019(4):38–39.
[36]朱昭華.淺析藍牙技術[J].電聲技術, 2018, 42(4):70–72.
[37]林滿山.淺談藍牙技術的發展現狀和前景[J].黑龍江科技信息, 2016(14):165.
[38]關鑫.三自由度上肢康復輔助訓練裝置設計[D].重慶:重慶大學, 2018.
[39]胡杰.多模態下肢康復訓練輪椅控制系統研究[D].上海:上海理工大學, 2017.
[40]倪俊杰, 劉宗凡, 邱元陽, 等.藍牙:我們可以這樣用[J].中國信息技術教育, 2021(3):68–74.
[41]黃東香 , 孫華.為物聯網而來的藍牙5.0[J].西部皮革 ,2018, 40(22):39.
[42] YANG Z, ZHU Q Q, AI Z Y, et al. Optimization design of lumpedparameterband-passfilterbasedonADS[J].Shandong Industrial Technology, 2014(14):147–149.
[43]劉震.基于 MEMS 傳感器與 ZigBee 網絡的人體手臂運動狀態測量和識別方法研究[D].成都:西南交通大學,2017.
[44]陸鵬, 葛嵩韜, 吳響, 等.基于 ZigBee 的個人健康信息管理與隱私保護系統設計[J].計算機測量與控制 , 2021,29(4):170–174.
[45] BRAIDOTAA,CIFUENTESCC, NETOAF,etal. ZigBeewearablesensordevelopmentforupperlimb roboticsrehabilitation[J]. IEEELatinAmerica Transactions, 2013, 11(1):408–413.
[46]張毅, 吳錦, 羅元, 等.新型 ZigBee-WiFi無線網關的設計及其抗干擾技術的研究[J].計算機應用與軟件 , 2014, 31(5):122–124,187.
[47] CIFUENTES C A, GENTILETTI G G, SUAREZ M J, et al. DevelopmentofaZigbeeplatformfor bioinstrumentation[C]//Proceedingsof 2010 Annual InternationalConferenceoftheIEEEEngineeringin MedicineandBiology. BuenosAires: IEEE, 2010:390–393.
[48]曾鵬, 王旭, 汪揚, 等.智能電網應用中 ZigBee 網絡多信道干擾避免策略[J].中國科學技術大學學報 , 2012,42(8):609–616.
[49]李叢巍.嵌入式 Internet 互聯網技術的研究及應用[J].中國科技投資, 2021(4):37,39.
[50]谷峰. TCP 和 UDP 協議在網絡通信中的應用[J].數字化用戶, 2019, 25(32):33–34.
[51]王俊峰, 劉婷, 高展, 等.一種基于 QUIC 協議的擁塞改進方法[P].中國, CN105827537A.2016-08-03.
[52]沈麗云, 尹孟征, 郭鳳仙, 等.基于 Android 的康復醫療機器人控制系統設計與實現[J].裝備機械, 2016(1):37–41.
[53] SCOTT J, MAPP G. Link layer-based TCP optimisation fordisconnectingnetworks[J]. ACMSIGCOMM Computer Communication Review, 2003, 33(5):31–42.
[54]袁凱, 李俊娥, 劉開培, 等.一種基于 UDP 的電力廣域保護系統可靠通信方法[J].自動化學報 , 2021, 47(7):1598–1609.
(編輯:丁紅藝)