
基于激光雷達下無人駕駛汽車的環境感知系統的研究
2023-07-10 09:10:30張旭燕郭建宏
汽車電器 2023年6期
關鍵詞:云計算
張旭燕 郭建宏

【摘? 要】隨著人工智能技術和互聯網技術的逐漸發展,人們生活水平不斷提升,人們出行方式也得到了轉變,傳統汽車駕駛方式正在向智能化、電子化和自動化方向發展,無人駕駛汽車是目前汽車發展的熱門領域。環境感知技術是無人駕駛汽車的重要控制技術之一,其工作性能直接影響無人駕駛汽車的行為決策準確度,關系著汽車行駛的安全性與可靠性。本研究以激光雷達為環境感知系統的設計基礎,并基于云計算方法提高環境數據處理效率,構建一種基于激光雷達下無人駕駛汽車環境感知系統,并通過試驗表明,該系統可以實現多維度環境信息感知,可以為無人駕駛汽車的智能化發展提供技術參考,對于保證無人駕駛技術推廣的安全性與可靠性具有一定的參考價值。
【關鍵詞】激光雷達;環境感知;云計算;無人駕駛;試驗
中圖分類號:U463.675? ? 文獻標志碼:A? ? 文章編號:1003-8639( 2023 )06-0003-03
Research on Environment Sensing System for Driverless Cars Based on LIDAR*
ZHANG Xu-yan,GUO Jian-hong
(Lanzhou Petrochemical Vocational and Technical University,Lanzhou 730060,China)
【Abstract】With the gradual development of artificial intelligence technology and Internet technology,people's living standards are constantly improving,among which the way people travel has also been transformed,and the traditional way of driving cars is developing in the direction of intelligence,electronics and automation,and driverless cars are currently a popular field of automotive development. Environment sensing technology is one of the important control technologies for driverless cars,and its working performance directly affects the behavioral decision accuracy of driverless car decision-making,and is related to the safety and reliability of car driving. This study takes LIDAR as the design basis of environment perception system and improves the efficiency of environment data processing based on cloud computing method to build a driverless car environment perception system based on LIDAR,and shows through experiments that the system can realize multi-dimensional environment information perception,which can provide technical reference for the intelligent development of driverless cars and is of reference value for ensuring the safety and reliability of the promotion of driverless technology. The system can provide a technical reference for the intelligent development of unmanned vehicles,and has certain reference value for ensuring the safety and reliability of unmanned technology promotion.
【Key words】LIDAR;environmental awareness;cloud computing;driverless;experiments
隨著互聯網技術的提升及中國綜合國力的快速發展,人民的生活水平也得到了很大的提高,生活方式逐漸發生改變[1-2]。其中,人們的出行方式逐漸由傳統的汽車駕駛正在向自動駕駛、智能駕駛和無人駕駛方向發展,因此,中國汽車產業發展迅速,汽車保有量的不斷提升也隨之帶來了一系列安全問題。
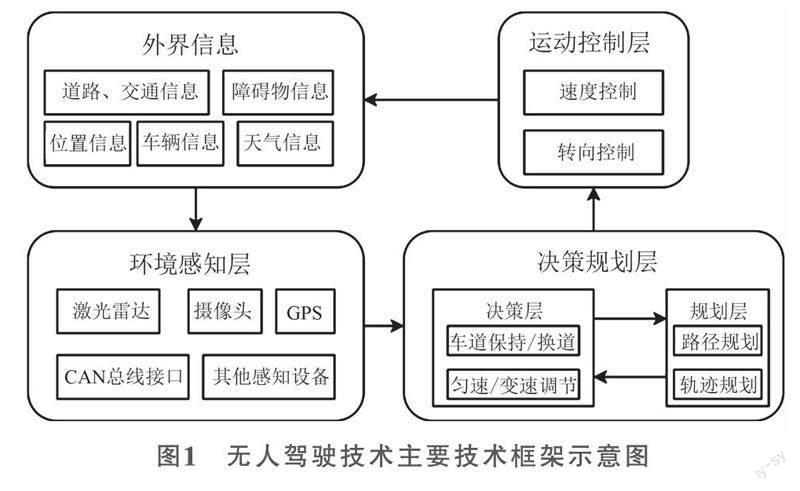
由于中國人口眾多,道路環境較為復雜,各種因素融合造成了中國交通事故高發,交通事故同時也帶來了一系列人員傷亡和經濟損失。無人駕駛汽車技術主要包括環境感知技術、決策控制技術和運動控制技術等(圖1),其中,環境感知技術是無人駕駛汽車的基礎,主要是通過各種傳感器獲取車輛及周圍駕駛環境信息,及時對車輛路徑規劃、運行速度和轉向等方面做出決策與控制。目前,美國Google公司推出的第5代無人駕駛系統融合了車載傳感器和新型激光雷達,可以提高道路故障發生的準確率與靈敏度,另外包括百度公司開發的無人駕駛Apollo、小馬智行和華為等也在無人駕駛技術中取得了一系列研究成果[3-6]。
為了提高無人駕駛汽車環境感知信息獲取的準確率,本研究提出一種基于激光雷達下無人駕駛汽車的環境感知系統,解決傳統由于單傳感器帶來外界信息的單一性,提高信息獲取的全面性與準確性。研究結果對于提高無人駕駛汽車的安全性與穩定性具有一定的參考價值。
1? 國內外研究進展
1.1? 基于視覺識別技術下目標檢測技術
車載視覺傳感器具有價格低廉、數據傳輸便捷等優點,在無人駕駛環境感知系統中得到了廣泛應用與發展,是目前技術相對成熟的環境感知技術之一。早期無人駕駛視覺識別技術主要是通過預先設定提取器,確定感知區域,對環境目標的明暗、腳點等局部特征進行分析,然后通過深度學習和人工智能算法等實現數據分析,但是對于未知數據預測性能較差,在復雜的道路環境應用較為困難。后期,隨著深度學習和人工智能算法的不斷發展,為數據處理提供一種新的解決方案,可以顯著改善傳統數據處理算法的精確度和抗干擾性,如兩步式算法、YOLO系列算法和SSD算法等,可以在改善數據處理速度的同時提高數據預測性能。
1.2? 基于激光雷達下目標檢測技術
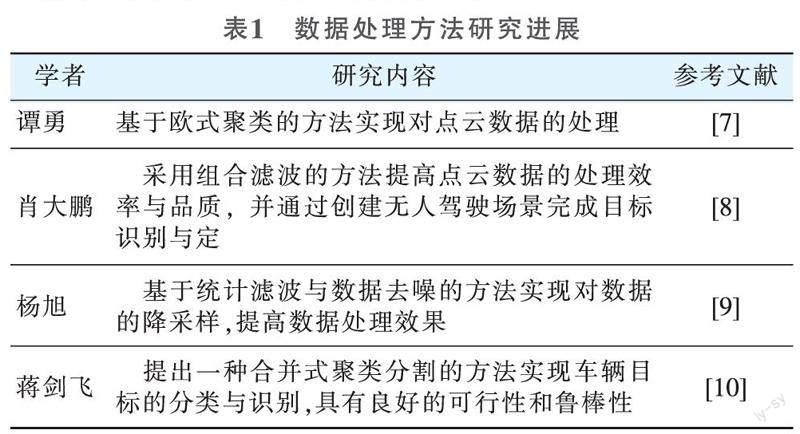
激光雷達是通過連續不斷的激光獲取目標物體的參數,通過三維點實現環境的感知。由于數據點具有不均勻性,因此需要對數據進行預處理,實現數據的除噪和降采樣。目前常見的數據處理方法如表1所示。
2? 基于激光雷達下無人駕駛汽車的環境感知系統的設計
激光雷達是無人駕駛汽車中常用的傳感器,是獲取汽車行駛位置及周圍道路信息的重要媒介。激光雷達主要是使用激光照明目標物體,通過主動照明有助于傳感器接收器在一切測量環境中對準發射源。傳感器不受外部光源影響,可在夜間、地下、隧道等環境中使用。本研究基于激光雷達實現信息采集與目標檢測,并將多傳感器采集的環境數據上傳至云計算平臺,實現無人駕駛汽車關鍵信息的獲取與道路目標檢測。
2.1? 數據采集平臺
數據采集平臺主要包括車載傳感器、攝像頭、激光雷達和汽車導航定位系統等,要求數據采集平臺可以實現環境數據采集,根據用戶需求定制數據采集與訪問方案。
2.2? 關鍵部件的設計與選型
1)激光雷達。本系統激光雷達選擇RoboSense生產的RS-Lidar-16,可以滿足系統對數據傳輸精度、響應靈敏度的要求,安裝在車輛頂端,其基本技術參數見表2。
2)攝像頭。無人駕駛車輛攝像頭選取LI-USB30-AR023ZWDRB,具有體積小、安裝便捷、分辨率較高及數據傳輸穩定等應用優勢,其主要技術參數見表3。
2.3? 數據處理算法設計
1)構建點云快速搜索。無人駕駛汽車激光雷達對目標物體掃描產生的原始點云數據不存在一定的拓撲關系,屬于無序狀態,因此,首先需要對激光雷達采集的點云數據進行處理,通過構建合理的數據拓撲結構實現數據的快速查詢,目前常見的點云數據處理方法主要包括半徑鄰域搜索和K鄰域搜索。
半徑內近鄰搜索(Neighbors within Radius Search),是指搜索點云中一點在球體半徑R內的所有近鄰點,程序如圖2所示。K鄰域搜索算法主要是通過數據所有的特征計算新數據與已知類別數據集中的數據點的距離,按照距離遞增次序進行排序,選取與當前距離最小的K個點,對于離散分類,返回K個點出現頻率最多的類別作預測分類;對于回歸,則返回K個點的加權值作為預測值[如將這些鄰居屬性的平均值賦給該樣本,就可以得到該樣本的屬性。更有用的方法是將不同距離的鄰居對該樣本產生的影響給予不同的權值(weight),如權值與距離成正比]。在本研究中選擇K鄰域搜索算法。
2)點云數據的精簡。使用激光雷達對無人駕駛環境信息進行采集時,初始數據過于冗余會造成計算負擔大,因此,應該對激光雷達采集數據進行精簡與劃分,為后續數據處理提供基礎條件。首先對有效區域面積進行劃分,具體范圍如表4所示,通過劃分有效數據檢測區域減少目標數據采集量;然后對數據進行降采樣,提高數據后續處理效率,減少數據的點云疏密程度,在此主要采用體素濾波法;最后排除噪聲對數據的影響,需要對采集的數據點進行噪聲濾除處理,常見的數據降噪方法主要包括半徑濾波、雙邊濾波等方法。
2.4? 數據處理算法測試結果
對提出的數據處理算法進行試驗與分析,采集點云數量見表5。由表5可知,在數據處理方法下,點云的數量逐漸下降,濾除了無效數據。選取點云數據真實障礙物1015個、檢測總數量1001個、漏檢數量127個、誤檢數量130個為評價指標對數據檢測結果進行分析。
3? 結論與展望
本研究針對目前無人駕駛車輛環境信息監測效率低等問題,提出了一種基于激光雷達的點云數據處理算法,構建無人駕駛車輛環境感知系統,并對采集數據處理方法與步驟進行論述,通過實驗驗證其方法可行性與穩定性。
本研究道路檢測障礙物主要為車輛行人和騎行者,未來應該豐富檢測數據種類,增加交通燈、信號牌等其它障礙物,提高環境感知系統和數據處理的通用性。
參考文獻:
[1] 劉奔. 基于改進環境感知技術的無人車路徑規劃和軌跡跟蹤控制方法研究[D]. 北京:北京林業大學,2021.
[2] 高揚,曹王欣,夏洪垚,等. 低可見度環境下基于同步定位與構圖的無人駕駛汽車定位算法[J]. 交通運輸工程學報,2022,22(3):251-262.
[3] 連天宇. 城市環境下的無人駕駛汽車換道決策研究[D]. 沈陽:沈陽工業大學,2021.
[4] 呂品,李凱,許嘉,等. 無人駕駛汽車協同感知信息傳輸負載優化技術[J]. 計算機學報,2021,44(10):1984-1997.
[5] 王媛媛. 考慮不確定性的無人駕駛汽車軌跡規劃算法研究[D]. 長春:吉林大學,2021.
[6] 李旭川. 多車環境下的無人駕駛汽車換道軌跡規劃方法研究[D]. 西安:長安大學,2021.
[7] 譚勇. 基于激光雷達的無人駕駛障礙物檢測與辨識[D]. 長春:吉林大學,2020.
[8] 肖大鵬. 典型場景下無人駕駛三維目標識別算法研究[D]. 哈爾濱:哈爾濱工業大學,2018.
[9] 楊旭. 激光雷達點云數據的濾波和分割處理[D]. 哈爾濱:哈爾濱工業大學,2020.
[10] 蔣劍飛. 基于激光雷達的智能汽車可通行區域及障礙物檢測方法研究[D]. 武漢:武漢理工大學,2020.
(編輯? 楊? 景)
猜你喜歡
數字技術與應用(2016年9期)2016-11-09 22:56:18
數字技術與應用(2016年9期)2016-11-09 00:07:05
知音勵志·社科版(2016年8期)2016-11-05 04:28:47
電腦知識與技術(2016年21期)2016-10-18 23:34:52
電腦知識與技術(2016年21期)2016-10-18 23:24:44
電腦知識與技術(2016年21期)2016-10-18 22:11:15
科技視界(2016年22期)2016-10-18 14:33:46
中國新通信(2016年16期)2016-10-18 10:49:17
大學教育(2016年9期)2016-10-09 08:54:03
科技視界(2016年20期)2016-09-29 13:34:06
