播種機監控系統技術研究現狀與展望*
2023-07-11 01:30:14陳錦劉云強王威王璐劉立晶
中國農機化學報 2023年6期
陳錦,劉云強,王威,王璐,劉立晶
(1.中國農業機械化科學研究院集團有限公司,北京市,100083;2.農業裝備技術全國重點實驗室,北京市,100083)
0 引言
播種是糧食生產中的重要環節,播種質量的好壞,直接影響種子生長發育的土壤環境,進而影響作物產量。由于播種機在作業時,播種過程具有全封閉的特點,若播種過程中出現意外情況而未及時消除,就會影響播種質量,甚至造成農作物大幅減產。為確保播種機的播種質量,可利用現代測控技術對播種機各部件的工作狀況進行監控。
隨著智能化控制技術的不斷發展,國內外學者對其在播種機上的應用做了大量研究,并取得了很大進步。比如,現階段播種機排種系統的驅動主要為機械傳動,通過地輪傳遞動力至排種軸,繼而驅動排種器進行播種。這種傳動方式缺點為地輪容易打滑,導致漏排種,進而影響播種機的播種質量。隨著電驅技術的發展,采用電機驅動排種軸轉動即可避免這種現象的發生[1]。由此可見,應用現代農業智能化和信息化技術,可提高播種質量,帶來良好的經濟效益和社會效益[2]。
目前我國大多數播種機上的監控系統主要由控制器、人機交互界面以及各種傳感器組成。控制器是整個控制系統的核心部件,主要實現數據的收發和處理。人機交互界面是駕駛員操作控制系統的媒介,主要進行系統的監控和數據的輸入。傳感器可對機具的工作狀況進行檢測,并將數據傳輸給控制器。控制系統的工作流程為:駕駛員在駕駛室內的人機界面上輸入播種機的各項作業參數,然后主控制器傳輸信號控制工作部件開始工作,安裝在機體上的傳感器對工作部件進行實時監測,并將所得數據顯示在駕駛室顯示屏上。
國內播種機在機械結構與設計等方面與國外的差距已明顯縮小,然而,在智能化程度上還遠遠落后[3]。本文歸納總結了國內外播種機監控系統技術研究應用與現狀,對現有的研究進行總結,以期為該領域工作者提供參考。
1 國外播種機監控系統技術研究現狀
20世紀80年代初,西方國家就已開始將電子技術用于播種機的流量檢測、水分檢測以及位置獲取等方面[4]。
在種肥流量的檢測方面,國外學者做了很多相關研究,如Karimi等[5]利用聲卡系統進行種子下落的計數和檢測,在種子前方放置鋼板,種子每次撞擊到鋼板時,麥克風便會感測到撞擊發出的聲音進而引起電壓上升,通過采集上升的電壓值實現對種子的計數,然后用MatLab對采集到的數據進行處理。這種聲學采集方式相比于帶狀采集可以獲得近乎無限量的數據,消除了種子滑動或彈跳的風險,且更能節省工作時間,提升工作效率。Karimi等[6]還通過設計實驗裝置,對比研究了激光二極管、紅外傳感器和光敏電阻傳感單元三者對種子流量監測的效果,結果表明,紅外傳感器的效果相對其他兩種來說是最優的,更適合用于種子流量的檢測。在傳感器的選擇方面,Taghinezhad[7]采用平行板電容式傳感器進行播種機均勻性的測量,并將測量結果顯示在顯示屏上。在土壤水分監測以及播深控制方面,Mander等[8]通過使用電容式土壤水分傳感器,將含水量轉化為電壓量進行獲取,繼而可對土壤中水分的入滲速率,排水以及使用情況進行監測。Nielsen等[9]通過傳感與控制系統來保持播種機恒定的播種深度,并對整個系統進行了測試。在播種機的位置獲取方面,GPS衛星定位技術以及各種輔助導航系統也得到了應用。Leemans等[10]通過利用機器視覺,設計了一種精密播種機的輔助導航系統,分析了該機構與控制算法的性能,并進行了田間試驗。
綜上所述,國外對播種機監控技術的研究起步較早,技術已發展較為成熟,多種不同類型的監控系統在播種機上得到廣泛應用。
2 國內播種機監控系統技術研究現狀
我國自20世紀末才開始將監控系統應用到播種機上,落后于西方國家,且監控系統只用于精密播種上。條播的種子流量監測,種子下落時間等還處于試驗室研究階段。近年來我國在精密播種監控方面研究進展很快,符合我們國情的各種監控系統相繼出現[4,11-13]。目前各項組成部分的技術與應用情況如下。
2.1 控制器
由于農業機械工作環境復雜多樣,因此根據不同的需求選擇合適的控制器變得尤為關鍵。許多控制器都可實現所需的功能,我國現有的播種機控制系統中控制器分為以下幾類(表1)。
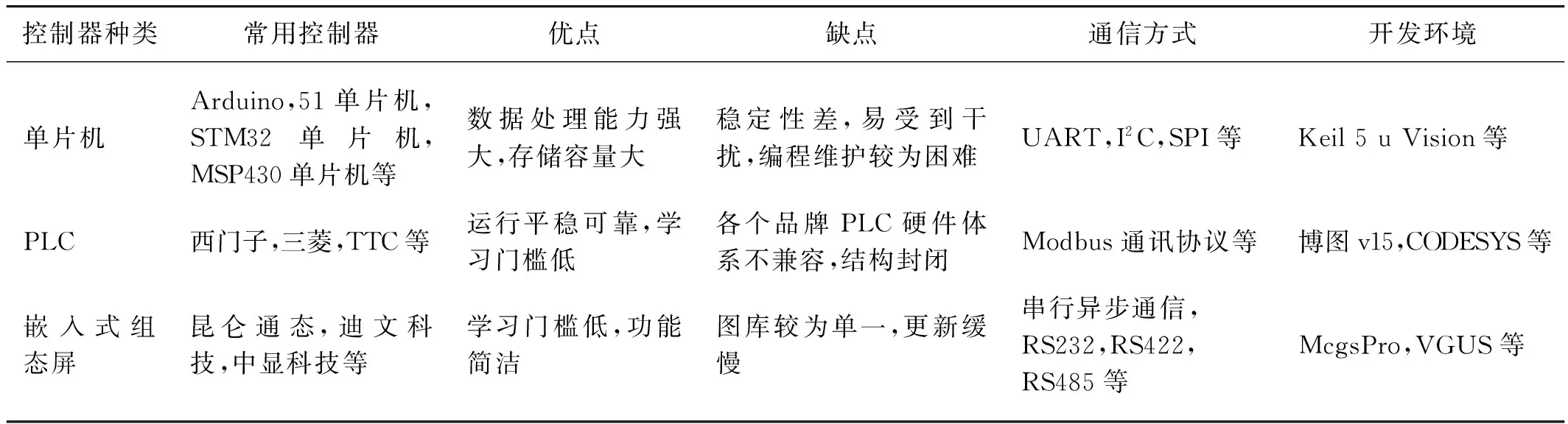
表1 播種監控系統控制器比較分析Tab.1 Comparison and analysis of the controller of sowing monitoring system
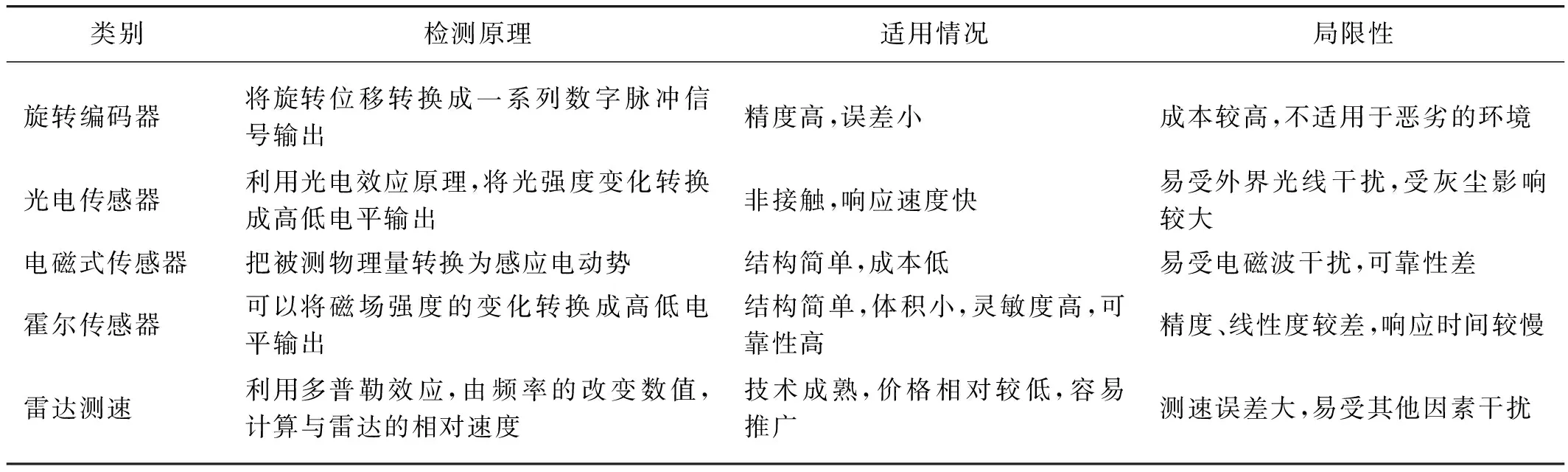
表2 常用測速傳感器性能對比Tab.2 Performance comparison of commonly used speed sensors
單片機由于其數據處理能力強,學習門檻低,在農業機械控制中應用十分廣泛。雷小龍等[14]利用Arduino單片機作為主控制器,利用HC-06藍牙模塊和串口通信作為數據傳輸方式,將信息數據傳輸到控制處理器,利用Android終端進行播種作業參數的設置。楊碩等[15]利用STM32F105RBT6為核心,利用Keil5軟件進行編程,實現播種環境的氣壓讀取、落種檢測等功能。
可編程控制器PLC(Programmable Logic Controller)由于其穩定的性能,入門較為容易,在工業控制中得到了廣泛的應用,在農業機械的控制領域也受到了眾多學者的青睞。楊碩等[15]利用集成控制器TTC580通過頻率采集端口對車速和電動機轉子的位置進行采集,通過電壓輸出端口控制電機驅動器,進而控制排種軸電機的轉速。
此外,嵌入式Linux控制系統也在農機控制領域得到了應用。王麗娟等采用ZigBee進行無線通信,將傳感器采集到的信息傳送到嵌入式Linux系統中進行數據分析,可以滿足高精度播種的需求。
2.2 人機交互界面
在機手進行田間作業時,通過在駕駛室安裝人機交互界面,可以使駕駛員實時了解機器的作業情況,方便應對各種突發情況。人機交互界面是操作者與控制系統交換信息的橋梁,在該領域已經有諸多方式可以實現人機交互。
由于移動端的發展,手機功能變得越來越強大,因此,很多學者在手機上開發App進行農機具的遠程監測,方便進行實時控制。丁友強等[16]采用Android studio進行軟件系統的開發,播種機作業時,可通過手機或平板實時觀測作業參數,并可通過移動端進行作業參數的調整和控制。
由于單片機用戶基礎良好,而串口屏可直接與單片機等控制器實現串口通信,易于進行人機交互,開發簡單,設計上較為靈活,因此也得到了廣泛應用。但是其總體售價較高,繼而制約了它的推廣。劉婉茹等采用mini dgus系列的Amt48320m035-06wt型串口觸摸屏,存儲模塊采用i2c協議,可以在界面內觀測調整小麥播種的各種作業參數,從而對播種機進行實時的調整。
組態屏主要應用于工業控制領域,由于其使用靈活,反應速度快,因此在農機領域也得到了應用。陳進等[17]利用三菱GT12型觸摸屏作為上位機,與三菱FX2N型PLC進行通信,采用Kingview6.5進行軟件開發,控制機械手進行循環吸、排種,提高了育秧播種機的工作效率。張伏等[18]利用MCGS觸摸屏對PID控制器進行控制,并通過傳感器對播種機進行檢測,對播種機進行實時的檢測與調整。
由于計算機的發展以及應用場合的不同,很多學者直接在計算機終端進行上位機界面的開發。高原源等[19]開發了基于LabVIEW的上位機畫面,通過電子控制單元采集傳感器的信號并上傳到上位機,并通過所建模型實時顯示播種深度。白慧娟等[20]采用IEI Ikarp型車載計算機,采用Lab Windows CVI2012軟件進行軟件界面的開發和設計,通過計算機終端顯示當前下壓力和鎮壓力的具體數值,并可對該數值進行實時修改和調整。高原源等[21]采用CODESYS作為PLC的編程工具,使用其自帶的CODESYS Visualization功能進行顯示器的開發,實現了對播種機作業參數的檢測和控制。
采用與單片機配套使用的LCD液晶屏也可進行簡單信息的顯示,功耗低,體積較小,顯示信息量大,但電路較為復雜。靳曉波[22]結合工作環境的實際狀況,采用LCD12864液晶顯示屏和矩陣按鍵進行控制和檢測,該液晶屏為串口工作方式,系統正常工作時液晶屏上顯示正常的工作參數,當系統出現異常時,對應的LED等閃爍,還可通過矩陣按鍵對工作部件進行快捷設置。
2.3 傳感檢測裝置
在播種機作業的過程中,需要通過傳感檢測裝置對播種機的各項參數進行實時監測,并將檢測到的數據顯示在人機交互界面上。現有播種機主要通過各種傳感器對排種軸轉速、作業速度、種子單粒下落數目、種肥箱的料位、播種機定位等進行監測。
排種器是播種機的核心部件,眾多學者將各種傳感器應用在了排種軸的速度監測上。各種傳感器由于其原理與性能的不同被應用在不同的場合。蔣春燕[23]在拖拉機前輪上貼上磁鋼,利用霍爾傳感器檢測探頭周圍的磁場強度變化,通過計算傳感器發出的脈沖數便可以得出播種機的前進速度。張春嶺等[24]采用雷達測速儀,通過采集發射與接收的頻率差來檢測播種作業速度。楊程等[25]利用干簧管傳感器進行行進速度的采集,提高了速度采集的精度。使用編碼器等可以準確獲得電機的轉速,但由于地面崎嶇不平等因素,會對播種機實際速度的測量造成影響。因此,有學者利用衛星定位系統直接進行機具的測速,可有效避免這一現象的發生。
衛星定位系統能夠為農業機械設備提供了精確的導航[26],并能及時矯正存在的偏差[27]。操作員可以通過它進行播種機路徑的規劃,并實時獲取播種機的位置。目前,美國的GPS衛星定位系統由于起步早,發展時間長,系統穩定性好,因此應用較為廣泛。丁友強等[11]通過NMEA-0183協議,利用GPS進行定位,利用GPS接收機接收信號,得到機具的工作速度。苑嚴偉等[28]通過GPS系統獲得播種機所在的實時坐標,將采集到的工作速度及坐標與作業處方圖進行比較,并根據理論數據調整電機轉速,進而實現變量播種和變量施肥。近年來,我國自主研發的北斗衛星定位系統也不斷發展,逐漸得到了應用。丁幼春等[29]采用高精度北斗定位模塊和電子羅盤進行組合導航,得到了履帶式播種機的位置和航向信息。
由于田間作業地面崎嶇不平,播種機的上下震動較大,這會對排種器的排種性能產生影響,因此有學者通過加速度傳感器對機具的震動狀態進行監測。黃小珊[30]采用加速度傳感器對排種器的振動進行監測,并對數據進行分析,得到了影響播種合格指數較大的因素。
種子從排種器中排出后,需要經過導種管才能下落到土壤中,因此學者們通過在導種管中安裝傳感器來監測種子的下落情況。雷聲媛等利用電容檢測法對種子進行檢測,由于小麥種子的介電常數與空氣不同,故當有種子從電容極板間下落時,會引起電容的變化進而產生電信號,以此來對下落的種子進行檢測。
種子落入土壤后,需要通過鎮壓輪對種子周圍的土壤進行鎮壓。在試驗階段,學者們利用傳感器采集鎮壓力的大小,進而確定最佳鎮壓力度的大小。在正常工作條件下,通過對鎮壓力大小進行監測,對鎮壓力的大小進行調整。白慧娟等[20]利用銷軸傳感器對播深和壓實度進行檢測,進而實時調節仿形機構的液壓力,實現對播深和壓實力的間接控制。高原源等[31]通過銷軸傳感器進行下壓力的測量,并進行了傳感器的力學分析,建立了融合播種深度因素的播種下壓力測量修正模型。
在種箱肥箱的監測上,通過在種箱肥箱內放置傳感器,可使駕駛員實時觀測到種肥箱中的情況,進而快速做出反應。苑嚴偉等[28]通過使用電容傳感器和壓力傳感器對種箱肥箱中的種肥進行監測,可判斷種肥箱中種肥剩余量的多少以及是否需要添加種子。
2.4 信號傳輸
傳感器與控制器之間的通信十分重要,各種通信方式因為不同的特點被應用在了不同場合。
CAN總線由于其高性能和可靠性,在汽車產業,工業自動化,醫療設備等方面得到了廣泛的應用。很多學者也將其應用在了農業機械的通信上。丁友強等[32]通過CAN總線實現播種單體驅動器與主控制器之間的通信,實現了變量播種控制數據的分散化處理,降低了主控制器數據處理的壓力,提高了數據處理的速度。紀朝鳳等[12]運用CAN總線作為通信網絡,實現了智能控制終端,轉向控制單元和傳感器信號采集模塊之間的數據通信。農業裝備的CAN總線通信模式成為目前農業裝備的主要現場通信模式[33],但國內精密播種裝備的CAN總線通信發展仍相對滯后[34]。
由于田間環境復雜,有線傳輸易與田間雜草等發生纏繞,影響機具作業,因此,WIFI,藍牙等無線通信技術在播種機上得到了廣泛的應用(表3)。劉志欣等[35]采用CC2530芯片,利用ZigBee的應用層,將標準ModBus協議的數據通過透傳方式進行傳輸。閆海敬[36]采用HC-06藍牙模塊進行單片機與Android之間的無線通信,通過移動端控制電機的驅動模塊,從而控制種植機的運行。王影等[37]采用WIFI模塊進行單片機與上位機之間的數據傳輸,以實現通過手機進行遠程控制和訪問的目的。

表3 常用無線通信方式對比Tab.3 Comparison of common wireless communication methods
2.5 其他技術及應用
隨著科技革命的興起,計算機視覺等技術得到了快速發展,眾多學者也將該項技術應用到播種機上,對提高播種機的性能有很大的輔助作用。由于田間影響因素較多,且大部分種子與土壤顏色相差較小,干擾因素較多,故該項技術目前主要應用于試驗臺上排種器的粒距檢測以及輔助導航方面。孫乃旭等通過DSP處理器和計算機輔助系統,實現了對田間圖像的處理,可以有效地提高播種機的導航效率。李朋飛等利用MatLab通過小波變換以及閾值收縮法對線陣CCD掃描或取得圖像進行處理,得到了種子之間準確的間距。王平崗等利用計算機視覺技術對播種的質量進行實時監測,并用過顯示電路顯示播種的質量,并在質量出現問題時發出報警。趙鄭斌等利用AVT1394相機進行圖像的獲取,采用VC++以及HALCON算法進行了機器視覺系統的開發,在針式精量播種機上進行了穴盤的精密播種性能測試。蔡曉華等通過在工業相機上安裝采集卡,以及自行研制的C++圖像處理軟件,對試驗臺上種子的粒距進行了處理和檢測。
PID算法是工業應用中最廣泛的算法之一,在農業機械領域也得到了應用。趙曉順等[38]通過Z-N法和模糊控制對PID參數進行了整定,利用MatLab完成了模糊PID控制設計,并使用其中的Simulink完成了仿真,縮短了系統響應時間,提高了控制精度。電機采用PWM調速方式,并使用PID智能控制策略。
播種機在田間作業時,有時會發生故障,而故障的排查費時費力,會極大地影響作業效率,耽誤播種時間,有學者將智能診斷技術運用到播種機的故障診斷中。宣峰等將智能診斷技術與PLC控制系統相結合,通過BP神經網絡對播種機的故障進行判斷,并利用MatLab軟件建立了仿真模型,提高了故障判斷的準確性。
3 我國播種機監控系統技術存在問題
目前,我國播種機監控系統自動化、智能化水平還處在一個較低發展階段,雖然已經出現很多新技術并進行了一定的試驗研究,但大多數還處在實驗室階段,并未得到實際的推廣和應用。我國應緊跟時代的潮流,加速自動導航、變量播種、云服務平臺、智能傳感等新技術的研究。雖然目前各種傳感檢測技術在播種機上已經得到了較為廣泛的應用,但是仍存在以下問題需要解決。
1) 排種器驅動方式滯后。在國外農機裝備中,地輪驅動、液壓馬達驅動、電機驅動等多種驅動方式均有應用,而我國排種器驅動方式主要為地輪驅動,只能通過改變更換鏈輪改變傳動比,進而改變株距,且易受打滑等因素影響,進而影響播種精度。
2) 信號傳輸方式落后,抗干擾能力較弱。現在播種機上的信號傳輸主要使用有線傳輸,布線復雜,易受震動、灰塵等田間環境因素影響,若播種機上的線纜與田間雜草、樹枝等發生纏繞,則會影響作業效率,甚至發生故障,無線傳輸安裝簡單,但穩定性較差,故障率高,田間作業環境相對復雜,易對信號傳輸造成影響。
3) 農用傳感器自主研發能力較弱,精度較低,與現有機型不配套。我國傳感器生產研發水平與國外有較大差距,一方面,國外傳感器起步較早,種類齊全,國產的農業類傳感器應用種類相對較少,且國內農機具種類繁雜,傳感器配套程度較低。如在流量監測方面,國外農機企業的高端機型上大都配備有流量傳感器,而國內的一般不具備此類傳感器[39]。另一方面,國外傳感器監測精度較高,性能穩定,可在高速工況下作業,國外播種機作業速度可達18 km/h,而國內播種機一般為6~10 km/h,由此可見,國內傳感器自主研發能力有待提高。
4) 播種機智能化程度較低。國外已經開始將處方圖、GPS定位、變量播種等新技術應用到播種機監控領域,可根據土壤水分、肥料等物理化學指標進行變量播種,將土壤肥力進行最大化利用。我國目前智能化水平較低,僅可根據傳統方法進行均勻播種。
5) 應用推廣成本較高。使用電子監控系統時,雖然極大地提高了作業質量,但成本增加,一套完善的播種機監控設備要花費數萬元之多,制約了它的推廣與應用。另外,由于我國播種機監控系統質量體系和服務體系發展不夠完善,作業性能不夠穩定,故障率較高,需要經常校正和維護,成本也隨之提高。
4 我國播種機監控系統技術發展趨勢
在保證作業質量的前提下,高速、智能、精密播種是播種機的發展方向。隨著國家政策的指引以及農民意識的提高,我國播種技術取得了很大的進步,針對上述存在問題,本文提出未來監控技術在播種機上的研究方向。
1) 在排種器驅動方面,未來應逐步由地輪傳動提供動力轉向電機驅動、液壓馬達驅動等多種驅動方式,滿足用戶的不同需求,提高播種的速度和精度。
2) 在信號傳輸方面,應采用5G等先進傳輸技術,加強對高速無線傳輸技術方面的研究,實現信號無線傳輸,提高指令的傳輸效率,通過加裝保護外殼等各項措施,降低作業過程中灰塵、雨水等其他因素的影響。
3) 在傳感器研制方面,我國應提高自主創新能力,適應現代農機裝備的發展方向,對于不同種類的農機具制定統一標準,進而對相應傳感器進行配套設計,針對我國農機具上不同的監控需求設計土壤養分、播深監測、種子位置監測等各類傳感器,研發精度高、抗干擾性能好、適應性強的傳感器。
4) 在播種機智能化方面,我國應增強變量播種、無人駕駛、處方圖等新技術在播種機上的研究與應用,提高播種機具的智能化水平。
5) 在應用推廣方面,我國一方面應提高自身技術水平,加大研發力度,降低系統故障率;另一方面,應出臺相關政策,加大對本土智能農機裝備的補貼力度,促進監控設備的推廣及應用。
5 結語
隨著播種技術不斷發展,我國播種機監控系統技術取了一定成績,但與國外技術發展水平相比,仍存在一定差距。為解決實際生產中種子漏播、重播以及播種均勻性差等問題,結合現階段農用傳感器精度較低、與現有機型不配套、抗干擾能力較弱、智能化水平較低的現狀,本文介紹了國內外播種機監控系統技術研究現狀,對控制器、人機交互界面、傳感檢測裝置、信號傳輸等組成部分的工作原理和應用情況進行了闡述,認為我國播種機監控系統存在排種器驅動方式滯后、信號傳輸方式落后、農用傳感器自主研發能力較弱、智能化水平較低、應用推廣成本較高的問題,結合我國現狀提出了未來播種機監控系統技術的發展趨勢。
猜你喜歡
工業設計(2022年8期)2022-09-09 07:43:20
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
少年博覽·初中版(2020年6期)2020-06-12 11:42:23
家庭影院技術(2017年9期)2017-09-26 03:41:45
故事大王(2016年7期)2016-09-22 17:30:08
海峽科技與產業(2016年3期)2016-05-17 04:32:12
