基于LDV的超高速循環水槽流場流速測量
2023-07-14 06:02:32耿浩涵王宗龍朱健申朱華倫
船舶與海洋工程 2023年3期
耿浩涵,王宗龍,2,朱健申,鄒 旭,朱華倫
(1.中國船舶及海洋工程設計研究院,上海 200011;2.噴水推進技術重點實驗室,上海 200011)
0 引 言
循環水槽是開展船舶水動力學試驗所需的重要設備。在循環水槽中,待測船體被固定在試驗段,通過水泵推動水流在循環水槽中循環流動,由此形成船體與水流間的相對運動,從而測定船舶的水動力性能[1]。由于水流能通過水泵的推動在循環水槽中循環流動,因此可打破試驗時間的限制。通過試驗段上的透明觀察窗,結合流場測量設備,可方便地對水動力性能進行測定。可在水槽中布置流量計、流速計和水聽器等多種測量儀器實現對水動力性能的多目標、自動化綜合測量。由于循環水槽具有諸多不可替代的優點,國內外相關高校和科研機構紛紛建立了各自的循環水槽[2],國內外相關學者針對循環水槽及相關試驗開展了豐富的研究[3]。在國內的研究中:湯忠谷等[4]對1/10 臥式模型水槽試驗段的水流情況進行了詳細的觀察和測試,在距離試驗段前端1/3 處的斷截面中心線位置測得了垂直方向的速度分布;ZHU等[5]采用數值方法和試驗驗證方法對循環水槽的水動力性能進行了深入研究,為水槽后續優化奠定了基礎;夏君培等[6]在立式循環水槽試驗段分別對有抑波板和無抑波板下3 種流速的分布情況進行了測試,證明了有抑波板時的速度分布比無抑波板時的速度分布均勻;于昌利[7]采用計算流體動力學(Computational Fluid Dynamics,CFD)方法研究了導流片和彎管對水槽流場均勻性的影響;陳建平等[8]對CWC(Circulating Water Channel)高速自由液面循環水槽試驗段流場品質進行了測量評估。在國外的研究中:VARGHESE 等[9]利用PIV(Particle Image Velocimetry)評估了循環水道的適用范圍;FELICE等[10]基于INSEAN循環水槽,利用PIV對螺旋槳旋轉角度下縱向平面內的尾流進行了測量分析。目前國內外有關超高速閉式循環水槽試驗段流場品質的研究較少,缺乏相關試驗數據。
本文基于噴水推進技術重點實驗室的超高速閉式循環水槽,利用激光多普勒測速儀(Laser Doppler Velocimeter,LDV)對試驗段的流場流速進行測量,為水槽流場品質評估和試驗研究提供測試數據支撐。
1 超高速循環水槽的構成及試驗能力
噴水推進技術重點實驗室采用的超高速循環水槽本體主要由試驗段、擴散段、收縮段、拐角段、輔助泵和軸流泵動力系統組構成(見圖1),在試驗段可形成0 ~10 m/s的常用試驗流速,試驗段流速最高可達12 m/s。超高速循環水槽部分設計參數及技術指標見表1。圖2 為超高速循環水槽試驗段示意圖,其兩側分別安裝8 塊有機玻璃觀測窗,便于進行流場測量,在試驗段可開展噴水推進裝置試驗、螺旋槳水動力試驗和水下航行體流場測試等試驗。

表1 超高速循環水槽部分設計參數及技術指標

圖1 超高速循環水槽示意圖

圖2 超高速循環水槽試驗段示意圖
2 超高速循環水槽試驗段軸向流速測量
2.1 試驗測量原理及測量系統
本文采用LDV對超高速循環水槽試驗段的軸向流場流速進行測量,LDV測量系統主要由數據處理系統、信號處理器、激光器、發射/接收探頭和分光器構成,見圖3。當流體中的運動粒子的尺寸足夠小且跟隨性良好時,運動粒子的速度可代表流體的速度。在對流場流速進行測量時,LDV發射出2 支光學性質完全一致的激光束并相交形成測量體;當運動微粒以速度Uy穿過控制體中的干涉條紋區時,會向空間任意方向散射明暗相間的光信號,這樣就會得到與運動微粒的速度呈正比的多普勒信號。根據采集到的多普勒頻移頻率與速度的關系式[11]便可求得運動粒子的速度,由此即可得到流場的流速。多普勒頻移頻率與速度的關系式為式(1)中:fD為多普勒頻移頻率;λ為激光波長;κ為光束的1/2 交角度;Uy為光束平面內垂直于交角平分線方向的速度。

圖3 LDV測量系統及測量原理示意圖
2.2 試驗測量方案
在循環水槽試驗段建立直角坐標系uOv,選取3 個流速測量截面(測量截面Ⅰ、測量截面Ⅱ和測量截面Ⅲ),其軸向(u向)距離分別為2 100 mm、5 300 mm和8 500 mm,見圖4。根據標準[12]在測量截面上選取測量區域,由于循環水槽試驗段具有對稱性,實際選取的測量區域為矩形ABCD,在x方向上均勻選取8 個流速測量點,在z方向上均勻選取7 個流速測量點,在測量區域上形成8 ×7 的測量點陣列(點間距為100 mm)。通過三維坐標架移動LDV激光測量體對測量點陣列的軸向流速進行測量,每個流速測量點的測量時間為2 min,采集頻率為667 Hz。采用不均勻度Cv評估流場流速分布的均勻性,Cv的表達式[13]為

圖4 試驗段測量截面流速測量點陣列示意圖
式(2)中:S為測量點陣列流速的標準偏差;v 為測量點陣列流速的平均值;Cv表征流速相對變異的度量,其值越小,流場的均勻度越高。
試驗段來流的紊流度ε等于流速測量值標準差與平均值的比值,其表達式[14]為
式(3)中:Ui為單點軸向流速單次測量值,m/s;U為單點軸向流速測量平均值,m/s;m為測量次數。
在流速測量中,通過控制循環水槽軸流泵動力系統的轉速獲取試驗段中的8 種來流速度(3 m/s、4 m/s、5 m/s、6 m/s、7 m/s、8 m/s、9 m/s和10 m/s),來流速度與軸流泵轉速的標定關系式為
式(4)中:U為循環水槽試驗段來流速度,m/s;n為軸流泵轉速,r/min。
2.3 試驗測量裝置
測量試驗是在噴水推進技術重點實驗室超高速循環水槽中進行的,通過LDV對試驗段流場流速進行測量,測量裝置見圖5。在流場流速測量中,LDV的激光器發出具有高亮度、高方向性和波長單純的激光束,分光器將激光束分成1 對單色光束,利用激光探頭將成對的單色光束相交到流場的測量區域內形成測量體。當流場中的粒子經過控制體時,產生散射光,并被接收光路接收。光電轉換模塊將接收的光信號轉換成電信號,數字信號處理器對電信號進行處理,并將多普勒信號從噪聲中分離出來進行測量。FlowSizer分析處理軟件通過火線與數字信號處理器相連,通過軟件對數字信號進行處理之后得到流場的流速值。為確保流場流速的測量精度滿足要求,根據循環水槽的實際運行工況對LDV 軟件采樣參數進行設置,具體參數設置見表2。

表2 LDV參數設置
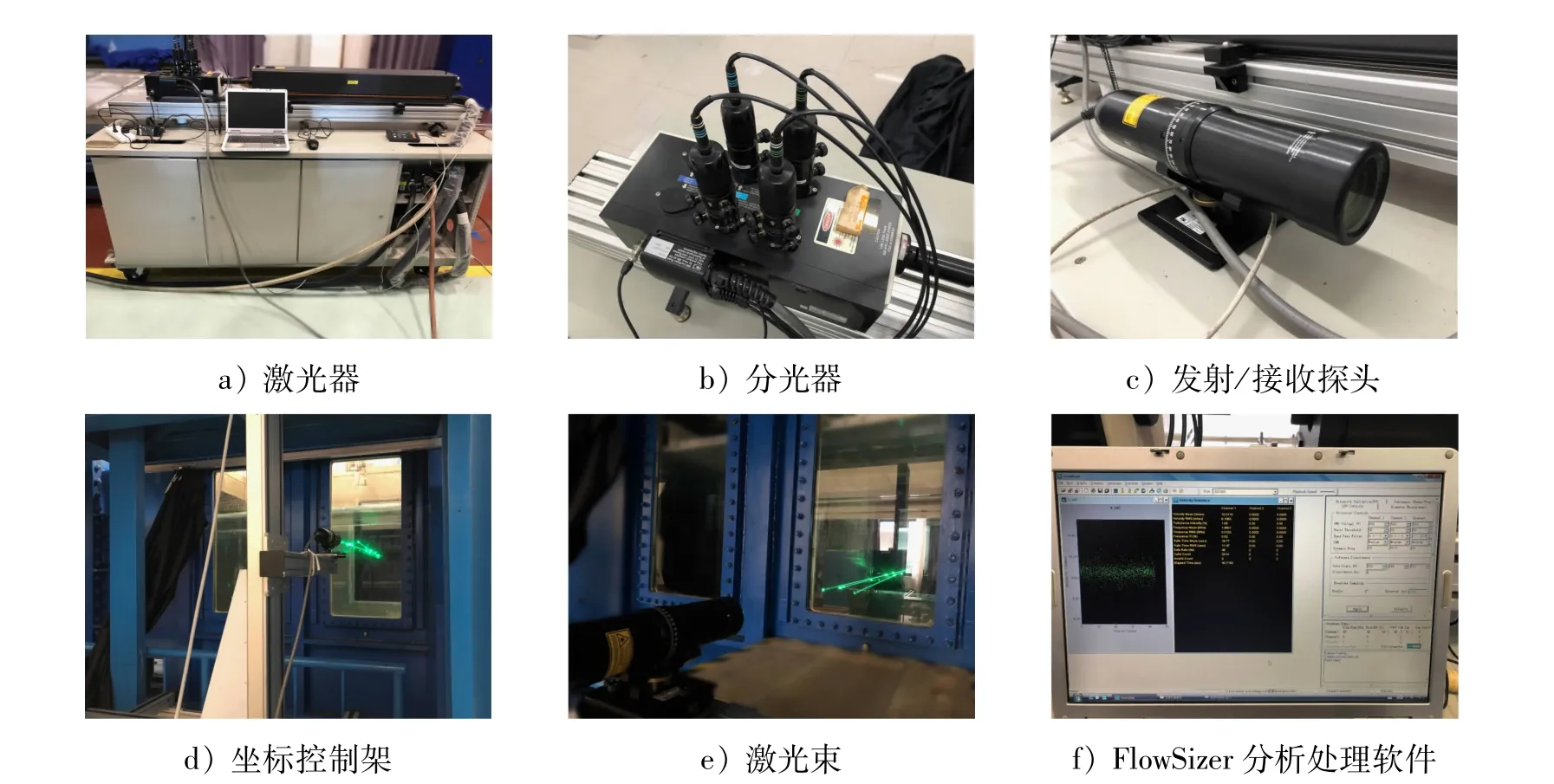
圖5 試驗段流速試驗測量裝置圖
3 試驗測量結果及分析
在8 種來流速度下,根據試驗測量方案,通過LDV測得截面Ⅰ、截面Ⅱ和截面Ⅲ上測量區域的軸向流速分布,并計算出這3 個截面上測量區域軸向流速的均值、平均偏差、不均勻度Cv和測量點最大紊流度εmax,計算結果見表3。為便于分析,將表3 中的平均偏差和不均勻度Cv繪制成折線圖,結果見圖6 ~圖8。
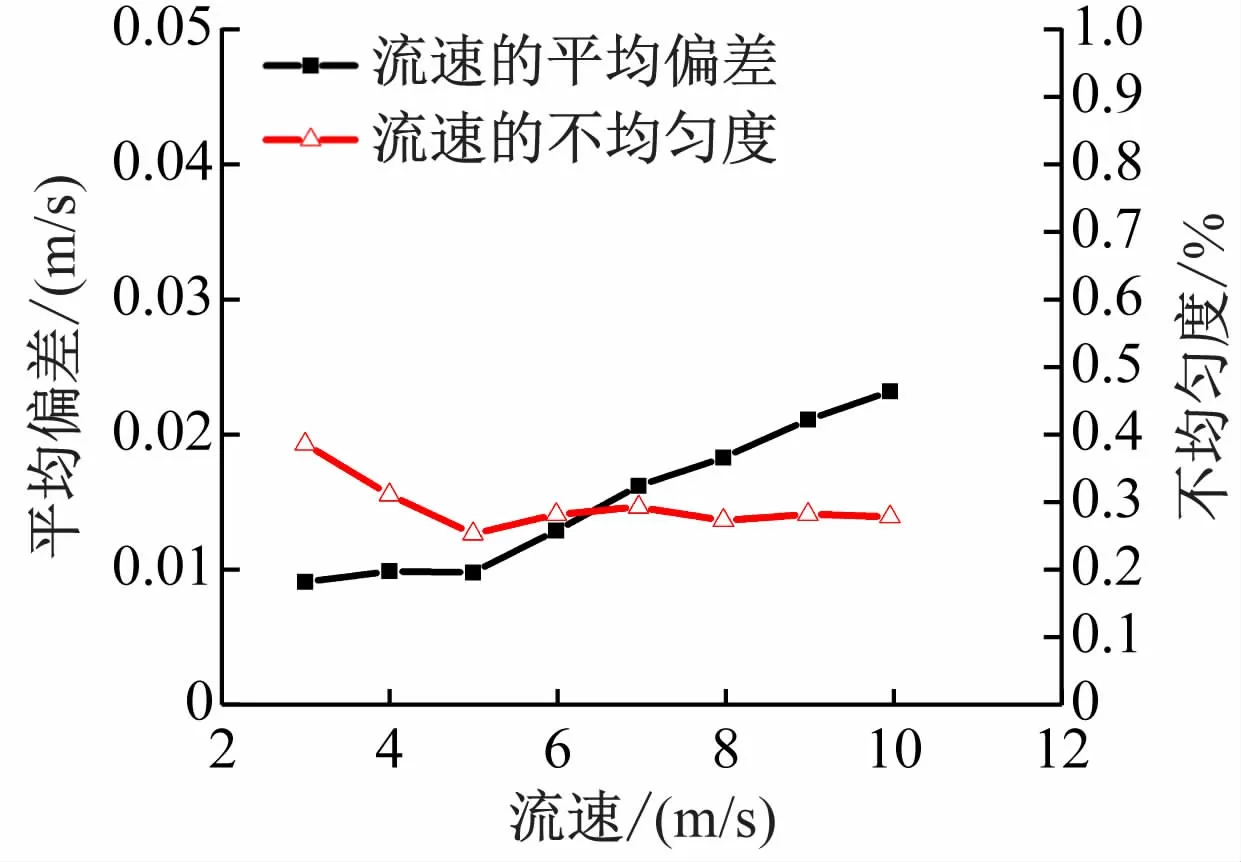
圖6 截面Ⅰ上測量區域流速的不均勻度與平均偏差折線圖
1)從圖6 ~圖8 中可看出,3 個截面上測量區域軸向流速的平均偏差均呈現出隨著流速的增大而增大的趨勢;由表3 可知,截面Ⅰ、截面Ⅱ和截面Ⅲ上測量區域流速的平均偏差的最大值分別為0.023 2 m/s、0.023 8 m/s和0.029 8 m/s。
2)從圖6 中可看出,截面Ⅰ測量區域流速的不均勻度在低速區(3 ~4 m/s)較大,在高速區(8 ~10 m/s)較小,在中速區(5 ~7 m/s)呈現出略有上升的趨勢。
3)從圖7 中可看出,截面Ⅱ測量區域流速的不均勻度在低速區(3 ~4 m/s)較大,在高速區(8 ~10 m/s)較小,在中速區(5 ~7 m/s)呈現出下降的趨勢。

圖7 截面Ⅱ上測量區域流速的不均勻度與平均偏差折線圖
4)從圖8 中可看出,截面Ⅲ測量區域流速的不均勻度在流速為4 m/s和7 m/s時較大,均勻度整體波動相對明顯。

圖8 截面Ⅲ上測量區域流速的不均勻度與平均偏差折線圖
5)由表3 可知:截面Ⅰ、截面Ⅱ和截面Ⅲ上測量區域流速的不均勻度Cv的最大值分別為0.385 8%、0.621 3%和0.843 1%,均小于1.000 0%,符合水槽流場品質對均勻度的要求;3 個測量截面的紊流度最大值均小于0.500 00%,測量結果符合設計指標的要求。
4 結 語
本文利用LDV,通過構建流場測量點陣列對超高速閉式循環水槽試驗段流場品質進行測量評估。通過試驗測得試驗段3 個截面上的測量區域在8 種來流速度下的軸向流速分布,并計算分析流場流速的不均勻度和紊流度,主要得到以下結論:
1)截面Ⅰ和截面Ⅱ上測量區域流速的不均勻度在低速區(3 ~4 m/s)較大,在高速區(8 ~10 m/s)較小;截面Ⅰ上測量區域流速的不均勻度在中速區(5 ~7 m/s)呈現出上升的趨勢,截面Ⅱ上測量區域流速的不均勻度在中速區(5 ~7 m/s)呈現出下降的趨勢;相對于截面Ⅰ和截面Ⅱ上測量區域流速的不均勻度,截面Ⅲ上測量區域流速的不均勻度整體較大,且呈現出明顯的波動。
2)在試驗段8 m/s來流速度下,3 個流場截面測量區域的紊流度均小于0.5%,滿足技術指標的要求。在8 種來流速度下,截面Ⅰ、截面Ⅱ和截面Ⅲ測量區域流場流速的不均勻度最大值分別為0.385 8%、0.621 3%和0.843 1%,均小于1.000 0%,符合循環水槽流場品質設計要求。
猜你喜歡
今日農業(2021年9期)2021-11-26 07:41:24
發明與創新·小學生(2021年3期)2021-03-25 11:48:49
中學生數理化·八年級物理人教版(2019年9期)2019-11-25 07:33:02
中學生數理化·八年級物理人教版(2019年3期)2019-04-25 06:20:54
中學生數理化·八年級物理人教版(2018年3期)2018-05-31 08:52:45
數學小靈通(1-2年級)(2017年10期)2017-11-08 08:39:45
中國科技博覽(2016年2期)2016-04-25 20:32:39
小學生導刊(2016年34期)2016-04-11 00:49:44
少兒科學周刊·兒童版(2016年1期)2016-03-14 03:52:21
電測與儀表(2015年5期)2015-04-09 11:30:52