基于直流虛擬同步機的直流充電樁反推電流控制
2023-07-17 02:13:02楊成順黃宵寧
濟南大學學報(自然科學版) 2023年4期
關鍵詞:系統
楊成順, 王 鵬, 張 強, 黃宵寧
(1. 南京工程學院 電力工程學院, 江蘇 南京 211167; 2. 濟南大學 自動化與電氣工程學院, 山東 濟南 250022)
在碳達峰、碳中和戰略目標推進下,電動汽車行業大規模發展。電動汽車作為高效、清潔的新型出行工具,可有效緩解化石能源消耗和環境問題[1]。
在電動汽車保有量持續上漲的同時,與之相配套的充電樁建設卻較為緩慢[2]。據統計,截至2021年12月, 我國電動汽車公共充電樁共114.7萬臺,樁車增量比為1∶3.7[3],充電樁的建設量已嚴重滯后于電動汽車的保有量,制約了電動汽車產業的進一步發展。除此以外,多數電動汽車車主對可用充電樁的充電速度非常不滿意,成為目前公共充電領域的一大問題[4],因此,加快研究可快速充電的電動汽車充電樁,對于我國電動汽車行業的發展具有重要意義。
電動汽車充電方式可分為交流充電和直流充電[5]。其中,交流充電樁充電時間通常為5~8 h,因此被稱為慢充。雖然交流充電方式在一定程度上能夠保護車輛電池的壽命,但是無法滿足用戶對快速充電的需求[6]。直流充電方式因充電速度快、實用性強而被稱為快充,原因是直流充電樁可在樁內將電網的交流電轉換為直流電,輸出電流更大,充電速度更快[7]。由于直流充電樁需要在整流的同時保障直流側電壓的穩定,因此對控制策略提出了更高的要求。除此以外,電動汽車負載的頻繁投切容易引起公共電網的電壓擾動以及充電樁輸出功率變化等問題,亟需更先進的控制策略來保障公共電網安全及充電樁的正常運行。
目前針對直流充電樁的控制研究大多集中在一些傳統的控制方法,如下垂控制、dq解耦控制和比例積分(PI)控制等,但在負載變化較復雜的情況下,傳統控制方法下的系統動態性能及抗干擾能力等存在明顯不足。文獻[8-9]中研究了在充電樁整流過程中采用下垂控制和基于傳統PI控制的電壓-電流雙環控制,可在負載端較穩定的情況下達到良好的整流效果,但該方法在面臨電動汽車負載的復雜投切情況時存在抗電壓擾動能力較弱問題。文獻[10-12]中通過建立整流器數學模型,提出了適用于直流充電樁的控制策略,取得了較好的控制效果,但平抑直流母線電壓波動效果較差。上述文獻僅僅將電動汽車看作充電樁的被動負載,負載變化引起暫態擾動時,直流母線電壓會隨之波動,此時電動汽車不具備主動參與調節充電樁直流母線電壓的能力,從而導致充電樁系統的不穩定。作為電網與電動汽車之間的橋梁,電動汽車充電樁面臨的主要問題在于系統缺乏慣性與阻尼[13],汽車負載的頻繁投切容易降低電能質量,甚至會影響配電網的穩定運行[14]。針對此問題,文獻[15]中提出一種利用儲能環節為直流系統提供慣性的控制方法;但該方法對系統元件及應用場景要求較高,因此不能廣泛應用于直流充電樁。文獻[16]中提出一種可為直流充電樁提供虛擬慣性的控制策略,可有效降低直流側電壓擾動,但輸出電壓依靠系統頻率的變化進行調節,對直流系統不具有普遍適用性。
傳統的虛擬同步機(virtual synchronous machines,VSM)技術可為交流系統增加慣量與阻尼,可有效抑制負載變化對系統頻率與功率的影響,但直流充電樁系統的控制目標為直流母線電壓,若將傳統的VSM技術改進為以直流側電壓為控制目標的直流虛擬同步機(DC virtual synchronous machines,DVSM),并將其引入直流充電樁控制中,則能進一步增強直流充電樁應對電壓擾動的能力。文獻[17]中提出在傳統電壓-電流雙閉環控制中引入一種新型電壓環控制方法,使直流系統具有類似同步機特性,可增強系統慣性,平抑直流電壓波動,但該方法使用基于傳統PI控制的電流環,存在動態性能較弱的問題[18]。反推控制作為動態性能優異的非線性控制方法,可降低負載擾動對系統的影響并縮小系統穩定所需時間,在直流虛擬同步機電壓外環控制的前提下,將反推控制應用于直流充電樁的電流環控制中,使充電樁在具有同步機特性的同時,進一步增強系統動態特性,可在更短時間內平抑電壓沖擊,大大增強直流充電樁的安全性能。
基于上述分析,針對電動汽車負載投切容易引起公共電網的電壓擾動及功率變化等問題,本文中提出一種適用于電動汽車直流充電樁的直流虛擬同步機控制方法。首先,在直流充電樁系統發生暫態擾動時,通過為系統增加一定的慣性與阻尼,使波動的直流母線電壓及輸出功率能自主參與調節至系統穩定;然后,利用反推法設計了電流環控制器,有效彌補傳統PI控制電流環在動態性能上的不足;最后,分別以直流虛擬同步機與反推電流環作為電壓外環與電流內環,將基于直流虛擬同步機的反推控制器(DVSMBS)引入直流充電樁,仿真驗證其穩定直流側電壓和調節輸出功率的能力。
1 電動汽車直流充電樁結構
電動汽車直流充電樁結構如圖1所示,主要包括公共電網、變壓器、相關電力電子元件和儲能電容等。公共電網中的電能通過變壓器調壓后,經濾波電感L、濾波電容C0濾波后向直流充電樁輸入三相交流電,整流后為汽車負載提供穩定直流電能。整流過程經直流虛擬同步機控制,并保持直流側電壓udc的穩定。
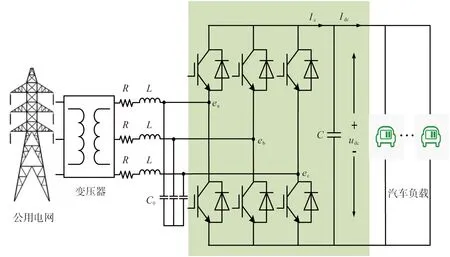
R—線路電阻; L—濾波電感; C0—濾波電容; ea、 eb、 ec—交流測三相端電壓; Ic—整流后輸入電流;Idc—充電樁輸出電流; C—直流側電容; udc—充電樁輸出電壓。圖1 電動汽車直流充電樁的結構
直流充電樁系統的慣性通常較小,當電動汽車以負載的形式并聯接入系統時將會引起母線電壓的波動,波動較大時不僅會影響汽車電池的壽命,甚至會影響公共電網的正常運行[19]。針對此問題,本文中采用直流虛擬同步機的方法為直流系統提供慣性與阻尼,從而使直流側電壓在受到擾動時能夠快速恢復穩定。
2 直流虛擬同步機數學模型
交流系統中VSM通過模擬傳統同步機數學模型,建立同步機定轉子運動方程,使變流器具有傳統同步機的慣量和阻尼特性。同步機極對數為1時,交流虛擬同步機數學模型[20]為
(1)
(2)
(3)
式中:Tm、Te分別為同步機機械轉矩和電磁轉矩;D為虛擬阻尼系數;ω為系統頻率;ωn為額定頻率;J為虛擬慣量;Pm、Pe分別為機械、 電磁功率。
VSM根據電網電壓和頻率的實時變化同步調節有功和無功功率,使被動負荷通過慣量和阻尼特性主動參與電網電壓和頻率調節[21]。同步機的慣性時間常數H表達式為
(4)
式中:W為轉子儲存的能量;Sn為同步機額定容量。
交流系統中,W可以表示為
(5)
由式(5)可知,虛擬慣量J越大,轉子儲存的動能越大,系統的慣性越大,可為受到擾動的系統提供足夠的有功支撐。類似地,直流系統中,能量通常存儲在直流側的并聯電容C中,電容存儲的能量W可以表示為
(6)
式中U為直流側電壓。
與交流系統相似,直流側的并聯電容C值越大,同步機存儲的能量越多,系統的慣性也更大,可以看出電容C與轉動慣量J起相同作用。實際上,直流系統中并聯的電容器通常容量較小,在系統受到擾動或較大負荷突然接入時,會因慣性較小而引起系統較大波動。針對此問題,本文中引入直流虛擬同步機,利用虛擬電容Cv代替直流側的并聯電容作為系統的慣性系數。虛擬電容通過充放電過程達到對系統的慣性支撐,電容兩側輸入電流與輸出電流的關系可表示為
(7)

為了使直流虛擬同步機能夠具有VSM類似的阻尼特性,增加阻尼系數D,使直流系統發生電壓變化時合理調節輸出電流,電容側輸入電流表達式為
(8)
式中:Iset為直流虛擬同步機給定輸出電流;Id為直流阻尼電流;udc為直流側電壓。
將式(8)代入式(7),可以初步得到直流虛擬同步機的表達式為
(9)
在直流配電網中引入電壓-電流下垂控制,可以利用下垂系數k依據輸出電流的幅值控制電壓的輸出[22],
Iset-Idc=k(un-udc),
(10)
式中un為直流側額定電壓。
根據式(1),并在式(9)的基礎上加入下垂控制,得到DVSM表達式為
(11)
DVSM控制結構如圖2所示。由式(11)可知,當直流側電壓udc改變并逐漸偏離額定電壓un時,直流虛擬同步機通過下垂系數k調節輸出電流。同時,由于阻尼系數D的存在,系統具備阻尼振蕩特性;虛擬電容Cv的存在彌補了直流系統小慣性的通病,為系統提供慣性支撐的同時,使母線電壓變化平緩,因此可保障直流充電樁的平穩運行[23]。
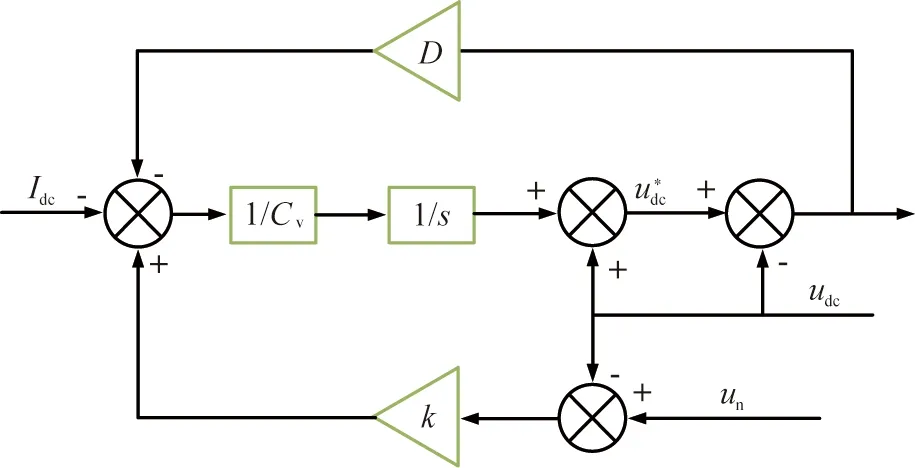
Idc—電容輸出電流; D—阻尼系數; Cv—虛擬電容;k—下垂系數; udc—直流側電壓; un—直流側額定電壓;直流虛擬同步機輸出電壓。圖2 直流虛擬同步機控制框圖
3 反推電流環控制器設計
目前,DVSM大多采用基于PI控制器的電流內環控制器,在實際仿真中發現,當系統接入或切除負荷時,PI控制可以保障系統在靜態的平穩運行,并在一定程度上減小系統擾動時的電壓波動,但是,PI控制的動態性能較差,對于直流充電樁來說,系統在負荷接入、切除時發生的短暫波動不僅會對電網產生短暫沖擊,還會使其他負載所加電壓產生短暫波動,甚至縮短電動汽車使用壽命。
針對傳統的基于PI控制的電流環在動態性能上的不足, 本文中設計了一種用于直流虛擬同步機控制的反推電流環, 用于改善電流環控制器的動態性能。
DVSM電流內環在dq坐標系下的數學模型[24]可表示為
(12)
式中:L、R分別為變流器線路電感、 電阻;ed、eq為交流測電壓的d、q軸分量;id、iq為交流測電流的d、q軸分量;ω為系統頻率;Sd、Sq為開關信號。
為了使式(12)更為簡潔,方便后續計算,提取其中變量id、iq,并定義狀態量[x1,x2]T=[id,iq]T,式(12)可改寫為
(13)
為了實現直流虛擬同步機電壓跟蹤控制,首先根據反推法經典步驟,定義誤差e1、e2為
(14)

選擇Lyapunov函數為
(15)
將式(15)求導并代入誤差x1的導數得到
(16)
式中k1為大于0的常數。
(17)
(18)

(19)
式中k2為大于0的常數。
若要使V2保持穩定,設計開關信號Sq為
(20)
(21)

利用所求Sd、Sq開關信號構造反推電流環控制器取代原來的電流環控制,改進后的反推電流環控制框圖如圖3所示。
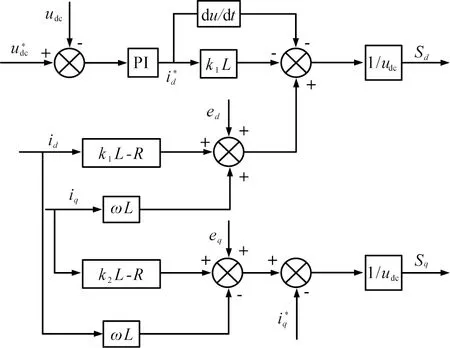
反推法d、 q軸誤差;k1、 k2—大于0的常數; ed、 eq—交流測電壓的d、 q軸分量;id、 iq—交流測電流的d、 q軸分量; Sd、 Sq—開關信號。圖3 反推電流環控制框圖
在實際運行中, 負載投切以及線路參數變化都會導致直流充電樁輸出電壓改變, 使用改進的電流環控制器可以使系統直接根據交流測電壓、 電流和直流側電壓等參數的變化及時調節輸出的脈沖寬度調制(PWM)信號, 進一步提升了系統動態性能與魯棒性, 能夠滿足直流充電樁安全、 高效的應用要求。
4 仿真驗證與結果分析
為了驗證本文中所提DVSMBS控制策略對直流充電樁控制的有效性,利用MATLAB/Simulink仿真軟件對圖4所示的控制策略進行仿真實驗,仿真實驗設置電動汽車負載簡單投切和復雜投切2種場景,在2種場景下通過對比直流側電壓變化結果對比分析本文中所提DVSM與傳統電壓電流雙環的控制效果,并通過對比充電樁直流側電壓和輸出功率的變化結果對比分析DVSMBS與使用PI電流環的DVSM控制效果。
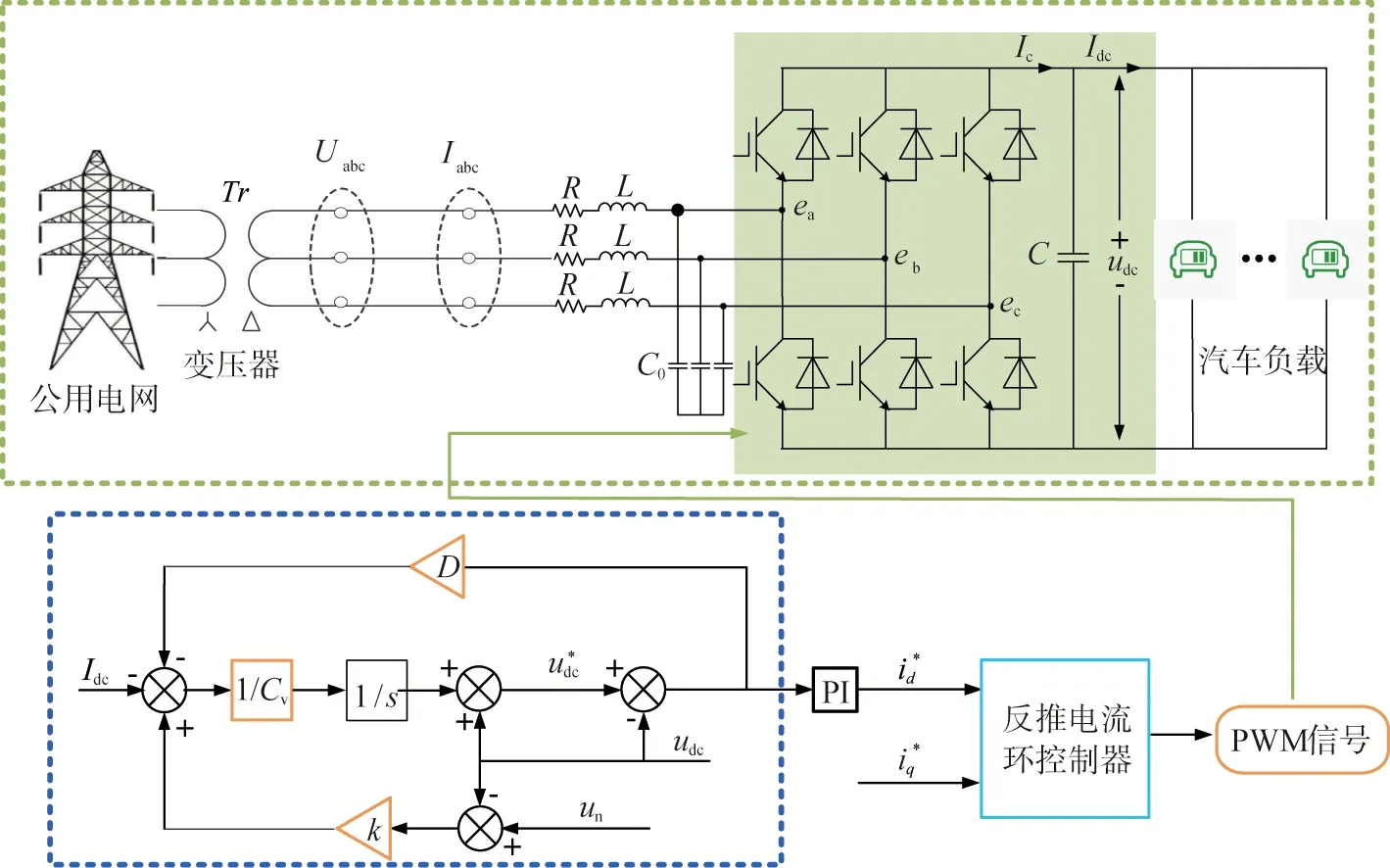
Tr—三相變壓器; PI—比例積分; PWM—脈沖寬度調制;Uabc—三相電網電壓; Iabc—三相電網電流;R—線路電阻; L—濾波電感; ea、 eb、 ec—交流測三相端電壓; Ic—整流后輸入電流;Idc—充電樁輸出電流; C—直流側電容; C0—濾波電容; Cv—虛擬電容; udc—充電樁輸出電壓;反推法d、 q軸誤差; k—下垂系數; D—阻尼系數; un—直流側額定電壓; 為直流虛擬同步機輸出電壓。圖4 直流充電樁控制策略結構圖
仿真模型中公共電網電壓值為35 kV,變壓器變壓比為35 kV/5 kV,直流虛擬同步機控制器系統參數如表1所示。

表1 直流虛擬同步機系統參數
4.1 汽車負載簡單投切場景
電動汽車負載簡單投切的場景設置如下:在直流充電樁開始運行時間t=0 s,t=4 s時,在直流充電樁已連接一輛電動汽車負載的前提下再次連接一輛電動汽車負載;當t=5 s時,充電樁切除一輛電動汽車負載。電動汽車負載阻值設為30 Ω。
電動汽車負載變化時,在直流虛擬同步機與傳統電壓-電流雙環控制下的直流側電壓變化如圖5所示。由圖可以看出,在電流內環均使用PI控制的前提下,在本文中提出的直流虛擬同步機控制策略下的系統直流母線電壓超調量更小,電壓恢復穩定時間更短,系統的魯棒性更好。
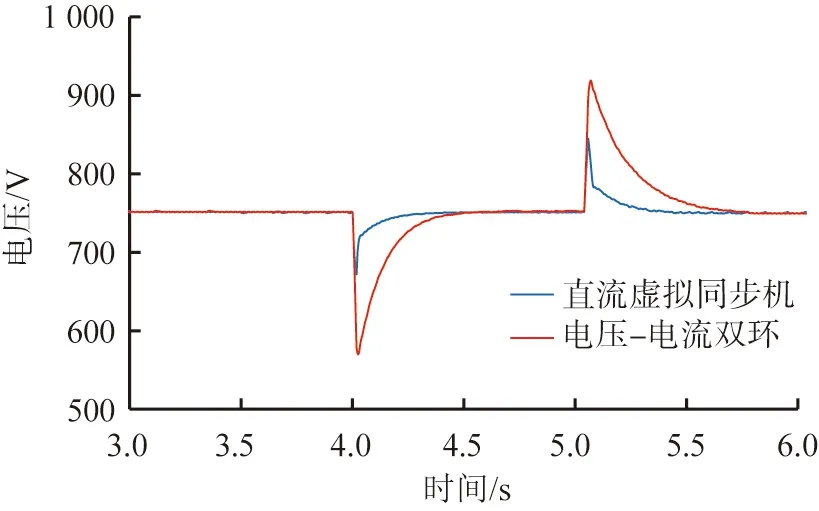
圖5 負載突變后充電樁系統直流側電壓變化
在使用直流虛擬同步機控制直流充電樁的前提下,當電動汽車負載變化時,使用傳統PI控制的電流環控制器(DVSM_PI)與反推電流環(DVSMBS)控制下的直流側電壓udc與充電樁輸出功率的變化曲線如圖6所示。
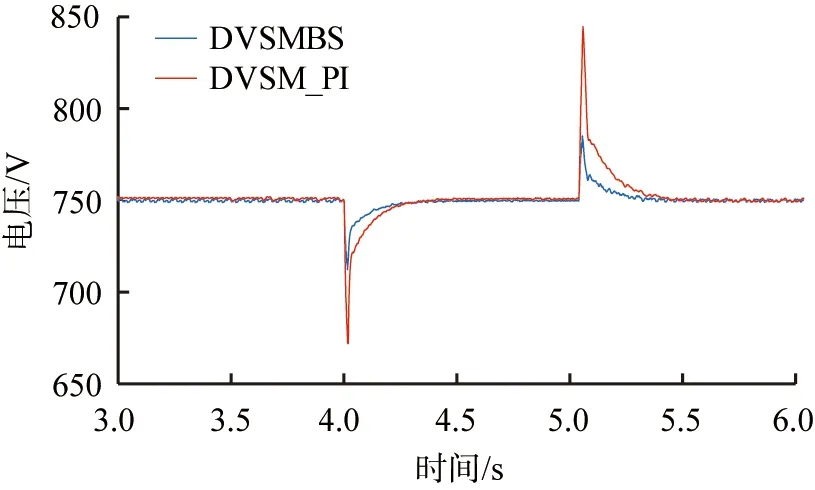
(a)直流側電壓
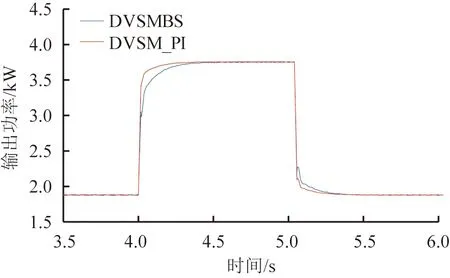
(b)輸出功率DVSMBS—直流虛擬同步機與反推電流環控制系統;DVSM_PI—直流虛擬同步機與傳統PI電流環控制系統。圖6 負載突變后充電樁系統直流側電壓與輸出功率變化
在t=4 s時,由于新接入負載,充電樁內有功功率不足,直流側電壓從穩定的750 V發生突減,隨后在虛擬慣性的控制下,直流電壓在較短的時間內重新恢復到750 V。由圖6可知,在接入負載過程中,直流虛擬同步機為系統提供的慣性支撐使電壓上升過程較為平滑且不會出現較大的超調量。由圖6(a)可知,在以直流虛擬同步機作為電壓外環的前提下,DVSM_PI系統的直流母線電壓在t=4 s時發生較大波動,波動幅值約為80 V,相同條件下DVSMBS系統直流側超調明顯減小,具有較好的魯棒性。由圖6(b)可知,DVSMBS系統輸出功率增至3.5 kW過程更平滑,系統可靠性更高。由此可以驗證,與傳統PI電流環相比,在直流母線電壓從突減到恢復穩定的過程中使用反推電流環的系統明顯超調更小,電壓沒有回落且穩定速度更快,且充電樁輸出的有功功率變化更為平緩,因此采用反推電流環的DVSMBS系統具有更好的動態性能。
在t=5 s時,充電樁切除1輛電動汽車負載,此時充電樁輸出有功功率大于負載需求,直流側電壓突增, 虛擬電容Cv的存在阻礙直流側電壓偏離額定電壓, 并使其短時間內重新穩定。 由圖6可知, DVSM_PI系統的魯棒性較差, 在切除1輛電動汽車負載后, 直流母線電壓發生了最大幅值約為100 V的電壓擾動, 且輸出功率突減至1.9 kW。 而DVSMBS系統在相同條件下, 直流母線電壓波動幅值約為30 V且輸出有功功率平緩下降, 能夠保障充電過程的安全進行。 從仿真結果可以看出, 與接入負載過程相似, 使用反推電流環的充電樁系統的魯棒性更強, 在電壓恢復穩定的過程中恢復速度快, 超調量小, 且沒有電壓回升現象, 穩定電壓效果更好。
4.2 電動汽車負載復雜投切場景
由4.1節中仿真結果可知,使用直流虛擬同步機與反推電流環控制的充電樁系統可以有效抑制負載變化引起的直流側電壓擾動。為了進一步驗證DVSMBS方法的有效性,對電動汽車負載的復雜投切場景進行仿真實驗。電動汽車負載復雜投切場景如下。
在t=3 s時,直流充電樁連接電動轎車(1號車),阻值為30 Ω;
在t=4 s時,車樁同時連接電動轎車(2號車)與中型客車(3號車),阻值分別為30、45 Ω;
在t=5 s時,連接中型客車(4號車)并切除1號車;
在t=6 s時,切除2號車;
在t=7 s時,切除3、4號車。
根據以上場景,電動汽車類型及接入、切除時間如表2所示。
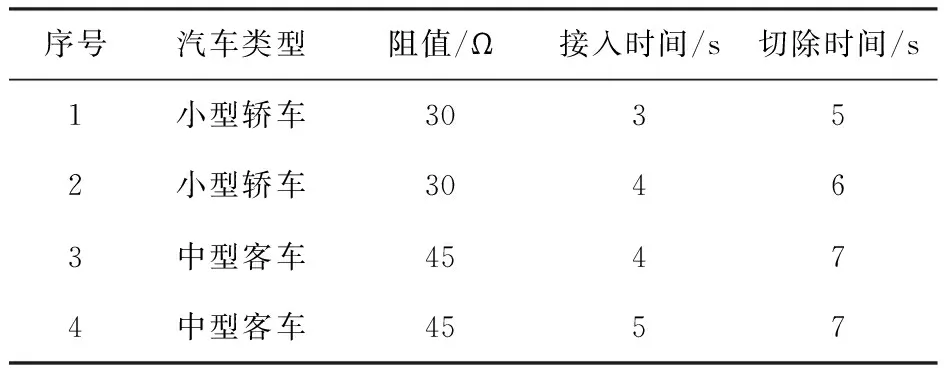
表2 電動汽車充電接入、切除設置
電動汽車負載復雜變化時, 在直流虛擬同步機與電壓-電流雙環控制下的直流側電壓變化結果如圖7所示。 由圖可知, 在均使用PI控制的電流內環時, 當充電樁受到不同情況的電動汽車負載投切時, 在直流虛擬同步機控制下的系統直流側電壓超調量更小, 電壓恢復穩定時間更短, 在負載復雜變化的情況下驗證了本文中提出的DVSM控制策略的有效性。
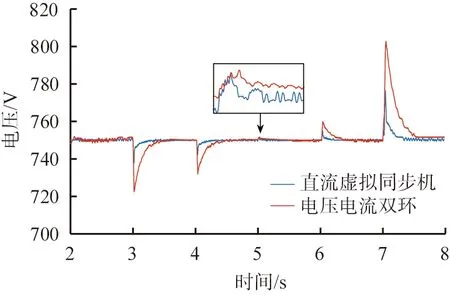
圖7 電動汽車復雜投切引起的直流側電壓變化
汽車負載的阻值以及投切情況共同決定了直流充電樁輸出的有功功率,并且兩者的變化將帶來直流側電壓擾動。面對汽車負載投切的不同情況,直流側電壓的變化以及充電樁能否及時輸出汽車負載所需功率是衡量充電樁性能的重要標準。
在使用直流虛擬同步機控制的前提下,分別使用傳統PI控制的電流環控制器(DVSM_PI)與本文中所設計的反推電流環(DVSMBS)控制下的直流側電壓udc與充電樁輸出功率的變化曲線如圖8所示。
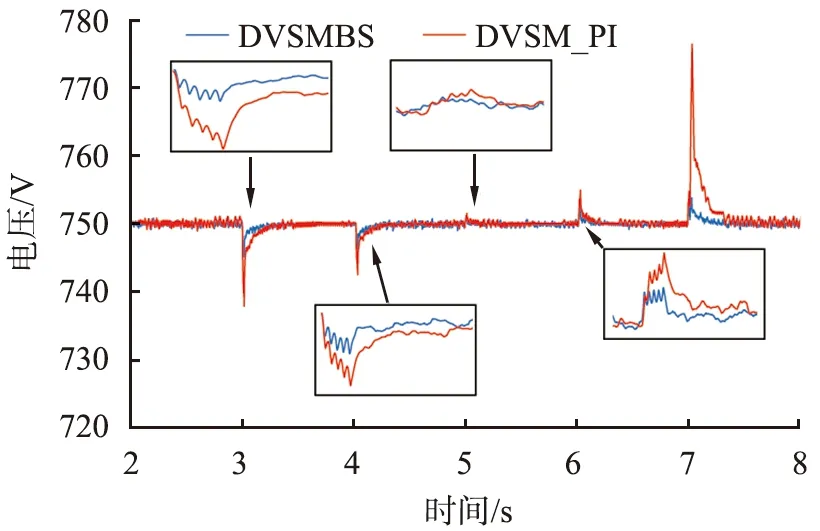
(a)直流側母線電壓
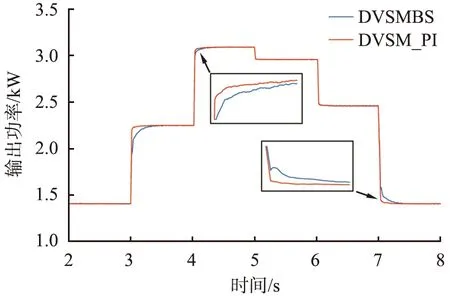
(b)輸出功率DVSM_PI—直流虛擬同步機與傳統PI電流環控制系統;DVSMBS—直流虛擬同步機與反推電流環控制系統。圖8 電動汽車投切引起的充電樁系統直流側母線電壓和輸出功率的變化
由圖可知,直流充電樁在t=3、 4 s時分別連接了不同阻值、不同數量的汽車負載,在系統慣性的支撐下,直流側電壓恢復穩定所需時間短,同時充電樁可即時調整輸出負載所需有功功率。值得注意的是,充電樁系統在接入負載后,直流側負載阻值越大,直流母線電壓的波動幅值越大,t=3、 4 s時,面對電動汽車投切引起直流側負載變化問題,相較于DVSM_PI系統,DVSMBS系統的直流母線電壓超調量明顯更小,電壓穩定時間更短,且輸出功率變化更平滑。t=5 s時,接入中型客車4號車, 切除電動轎車1號車,由于直流側負載變化較小, 因此DVSM_PI系統與DVSMBS系統的直流母線電壓均發生微小波動,充電樁輸出功率也隨之變化。t=6、 7 s時,系統分別切除了不同車型、不同數量的汽車負載。由圖8可知,t=7 s時,充電樁切除的負載較大,直流側負載隨之發生較大變化,DVSM_PI系統直流母線電壓發生劇烈波動,系統可靠性低,而采用反推電流環的DVSMBS系統的電壓超調量依舊較小且輸出功率變化緩慢,具有更好的魯棒性。
仿真結果表明,在直流虛擬同步機控制下,傳統PI電流環和反推電流環都能夠很好地平抑直流母線電壓擾動且靈敏地調整輸出功率,但采用反推電流環的充電樁輸出功率平滑,可以更好地穩定直流側電壓,具有更好的魯棒性,能夠保障充電過程安全進行,仿真結果驗證了所提DVSMBS控制策略的有效性。
5 結論
電動汽車直流充電樁的充電速度更快,能夠滿足車主短時充電的需求,然而,直流系統的慣性一般較小,汽車負載的不規律投切極易引起直流側電壓的擾動,進而影響充電過程的正常進行,甚至危害公共電網的穩定性,為此,本文中提出了一種適用于直流充電樁的直流虛擬同步機控制策略,并且利用反推法構造了動態性能更好的反推電流環控制器,得出以下結論:
1)通過分析交-直流系統運行特性,得到了適用于直流充電樁的直流虛擬同步機控制策略,可以為直流系統提供虛擬慣性,同時面對負載投切的復雜情況時可以很好地穩定直流側電壓波動。
2)針對傳統電流環PI控制的動態性能較差問題,提出了反推電流環控制器。仿真結果表明,使用反推電流環可以更好地減小電壓擾動,并且充電樁輸出功率過程更為平滑。
3)通過對汽車負載的簡單、 復雜投切情況進行應用場景進行仿真分析, 證明了將直流虛擬同步機與反推電流環用于直流充電樁具有更好的控制效果。
猜你喜歡
工業設計(2022年8期)2022-09-09 07:43:20
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
裝備制造技術(2019年12期)2019-12-25 03:06:46
制造技術與機床(2019年10期)2019-10-26 02:47:06
中國洗滌用品工業(2019年4期)2019-05-11 09:27:34
鐵道通信信號(2018年5期)2018-06-28 03:06:24
家庭影院技術(2017年9期)2017-09-26 03:41:45
知識經濟·中國直銷(2017年5期)2017-06-15 20:28:19
通信電源技術(2016年6期)2016-04-20 06:21:32