基于矢量分解原理的三軸加速度計同步沖擊標定方法*
2023-07-27 11:07:38王清華張媛媛郭偉國
爆炸與沖擊 2023年7期
王清華,張媛媛,高 猛,徐 豐,郭偉國
(1.西北工業大學航空學院,陜西 西安 710072;2.西北工業大學航天學院,陜西 西安 710072)
三軸加速度計可實現空間三維運動狀態信息的同時測量,在運動監測與模式識別[1]、空間振動測試[2-3]、空間沖擊測試[4],以及彈載捷聯慣導[5]、侵徹彈引信[6]等特殊領域都有著重要應用。而作為一種信號轉換器件(通常由加速度信號轉換為電壓或電荷信號),三軸加速度計在投入工程應用之前需先對其靈敏度系數進行標定,以保證測量結果的可靠性和有效性。
關于三軸加速度計的標定方法,目前尚無統一標準。普遍采用的方法可歸納為兩類:單軸依次標定法和三軸同步標定法。所謂單軸依次標定法,就是采用單軸加速度計的標定方法對三軸加速度計的各敏感軸進行依次標定。例如,Ripper 等[7]和Oota 等[8]采用振動臺對加速度計的靈敏度系數進行了標定;陳德英等[9]采用馬歇特錘對一種壓阻式高g值加速度計進行了標定;李玉龍等[10]、李功等[11]、Yuan 等[12]采用Hopkinson 桿對高g值加速度計的靈敏度及動態線性度等參數進行了標定。然而,上述單軸依次標定法存在明顯的共性不足或缺陷,即無法實現三維沖擊載荷的同步激勵,進而無法模擬三軸加速度計在工程中通常需要面臨的空間三維沖擊工況。因此,容易造成三軸加速度計的靈敏度,尤其是軸間耦合靈敏度存在較大的標定誤差。三軸加速度計的三軸同步標定法是采用三軸同步加載方式對三軸加速度計進行標定。而能夠實現三軸同步加載的方法,目前主要有兩種:重力場翻滾法和三軸振動臺法。重力場翻滾法通過為三軸加速度計設置特定的靜姿態,將其自身承受的重力加速度沿各敏感軸進行分解,并以此實現對三軸加速度計的同步加載。Won 等[13]、Sipos 等[14]和Beravs 等[15]采用重力場翻滾法對三軸加速度計的靈敏度系數進行了標定。然而,由于重力場翻滾法受地球引力的限制,該方法所能實現的加載幅值有限(最大不超過1g),因此只適用于小量程三軸加速度計的同步標定。三軸振動臺法則采用3 個兩兩相互垂直、彼此獨立控制的單軸振動臺激勵三軸同步振動載荷,從而實現對三軸加速度計的同步振動加載與標定。Umeda 等[16]、張俊等[17]和曾國英等[18]采用三軸振動臺法對三軸加速度計的靈敏度系數進行了標定。但在三軸振動臺法中,除需要3 個獨立控制的單軸振動臺外,還需要額外配備復雜的耦合裝置以實現對三軸振動載荷的疊加[18-19]。而耦合裝置的有效性和可靠性成為該方法校準精度的一大考驗。此外,采用振動載荷標定的加速度計對沖擊載荷進行測量是否會產生難以接受的誤差,目前尚無明確結論。事實上,考慮到三軸加速度計在實際工程中所面臨的工況多為空間三維沖擊,因此,真正適用于對三軸加速度計進行標定的載荷應為三軸同步沖擊載荷。然而,對于幅值高、歷時短的沖擊載荷,要實現其三軸同步激勵有一定的難度,工程上尚無成熟技術方案。因此,現階段建立一種有效的三軸沖擊載荷同步激勵方法與裝置對三軸加速度計的標定具有一定的現實意義和工程實用價值。
另一方面,在加速度計的標定中,實現激勵載荷的準確追溯和計量是加速度計標定方法可行性和有效性的關鍵環節。在已經頒布的國家標準中[20-21],采用基于激光干涉的絕對光學測量法來計量標定過程中產生的加速度量。然而,激光干涉儀造價昂貴、操作復雜,使得該方法難以在工程領域得到推廣。而高速攝像與數字圖像處理技術近年來得到了長足發展,為振動與沖擊測試領域提供了新的可選方案[22-24]。相較于激光干涉儀,高速相機與數字圖像處理在測試成本、使用維護等方面均具有一定的優勢。若能夠將其應用于加速度計標定中對加速度量的計量,將是對現有測量方法的有效補充,但與之相關的研究尚未見報道。
本文中基于配備有沖擊放大器的跌落臺與矢量分解原理提出一種三軸沖擊載荷同步激勵方法,并建立相應的裝置,實現大量程(102g~104g)三軸加速度計的同步沖擊加載。利用高速相機與MATLAB圖像處理對三軸加速度計標定過程中激勵的加速度量進行了測量。建立同步標定方法和裝置對三軸加速度計進行同步沖擊標定,采用最小二乘法與矩陣微分對同步沖擊標定中三軸加速度計包含主靈敏度系數與軸間耦合靈敏度系數的靈敏度矩陣進行求解,并對三軸同步標定與單軸依次標定后三軸加速度計的測量精度進行對比,同步標定法相比單軸依次標定法可實現三軸加速度計測量精度的提升。
1 標定原理
1.1 三軸加速度計同步沖擊加載
基于跌落臺與沖擊放大器建立的三軸沖擊載荷同步激勵與三軸加速度計同步沖擊加載裝置如圖1所示。裝置主要由基座、落臺、導向柱、無桿氣缸(含滑塊)、剎車機構、波形整形器、沖擊放大器以及帶有斜端面的砧座等主要部件構成。標定時,先將無桿氣缸正向接通高壓氣源,滑塊向上運動,將剎車機構連同落臺一起提升至預定高度后剎車。然后將無桿氣缸反向接通高壓氣源,滑塊回落至下限位。此時,剎車機構松開,落臺釋放,沿導向柱做近似自由落體運動,直至與波形整形器A 發生同軸碰撞。落臺與波形整形器發生碰撞的瞬間,在落臺及其上表面激勵豎直向上的沖擊載荷。沖擊放大器與落臺固定連接,錘頭將由于慣性繼續向下沖擊,并與安裝于沖擊放大器底部的波形整形器B 發生共軸碰撞,碰撞將在錘頭及其上表面激勵豎直向上的沖擊載荷。
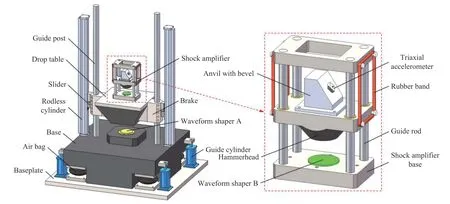
圖1 基于跌落臺與沖擊放大器的三軸加速度計同步沖擊標定裝置示意圖Fig.1 Schematic diagram of the synchronous shock calibration device for a triaxial accelerometer based on a drop table and a shock amplifier
將落臺或錘頭與波形發生器碰撞的動力學模型簡化為單自由度彈簧振子模型,則落臺或錘頭上激勵的沖擊載荷的圓頻率為[25]:
式中:ωn為激勵沖擊載荷的圓頻率,k為波形整形器A 或B 的軸向剛度,m為落臺或錘頭的質量。波形整形器B 選用較大剛度,且錘頭質量相對落臺質量小得多。因此,落錘上激勵的沖擊載荷的圓頻率較大、載荷脈寬較小。落臺釋放下落的過程中,錘頭與落臺速度近似相等。而兩者速度減小至零的過程中,錘頭歷時較短,因此其加速度脈沖必然有較大的幅值,此為沖擊放大器的工作原理。
待標定三軸加速度計安裝于砧座的斜端面上,如圖2 所示,x、y、z分別表示三軸加速計的敏感軸及方向。砧座與錘頭剛性連接,設錘頭沖擊波形整形器B 激勵的豎直向上的載荷為加速度aref,則三軸加速度計也將沿豎直方向承受加速度aref,如圖2。作為矢量,aref必遵循矢量分解原理,可分解為垂直于斜面的分量an和平行于斜面的分量at。其中,垂直于斜面的分量an即為沿加速度計z軸的分量az,而平行于斜面的分量at又可進一步分解為沿加速度計敏感軸x的分量ax和沿敏感軸y的分量ay。據此,沖擊放大器通過借助斜端面實現了三軸沖擊載荷的同步激勵與三軸加速度計的同步沖擊加載。由矢量分解原理,沿三軸加速度計各敏感軸激勵的載荷可通過下式計算:
式中:α 為砧座斜端面相對于水平面的傾斜角度;β 為三軸加速度計繞z軸旋轉的角度,即x軸相對砧座斜端面橫向軸線的夾角或y軸相對砧座斜端面縱向軸線的夾角;ax、ay、az分別為aref沿三軸加速度計敏感軸x、y、z的分量。
1.2 加速度 aref 的計量
由圖2 和式(2),要想得到標定裝置沿三軸加速度計各敏感軸激勵的同步載荷值,關鍵是實現對加速度aref的計量。采用高速攝像機與MATLAB 圖像處理結合的方法對aref進行計量,其原理見圖3。在錘頭長度方向的側面上選擇一特定像素點,記錄像素點的初始橫、縱像素值。采用高速攝像機對錘頭沖擊波形整形器B 的過程進行拍攝,基于MATLAB 圖像處理對沖擊過程中選定像素點的縱向像素值隨時間的變化進行記錄。設沖擊過程中選定像素點下落位移關于時間的函數為:
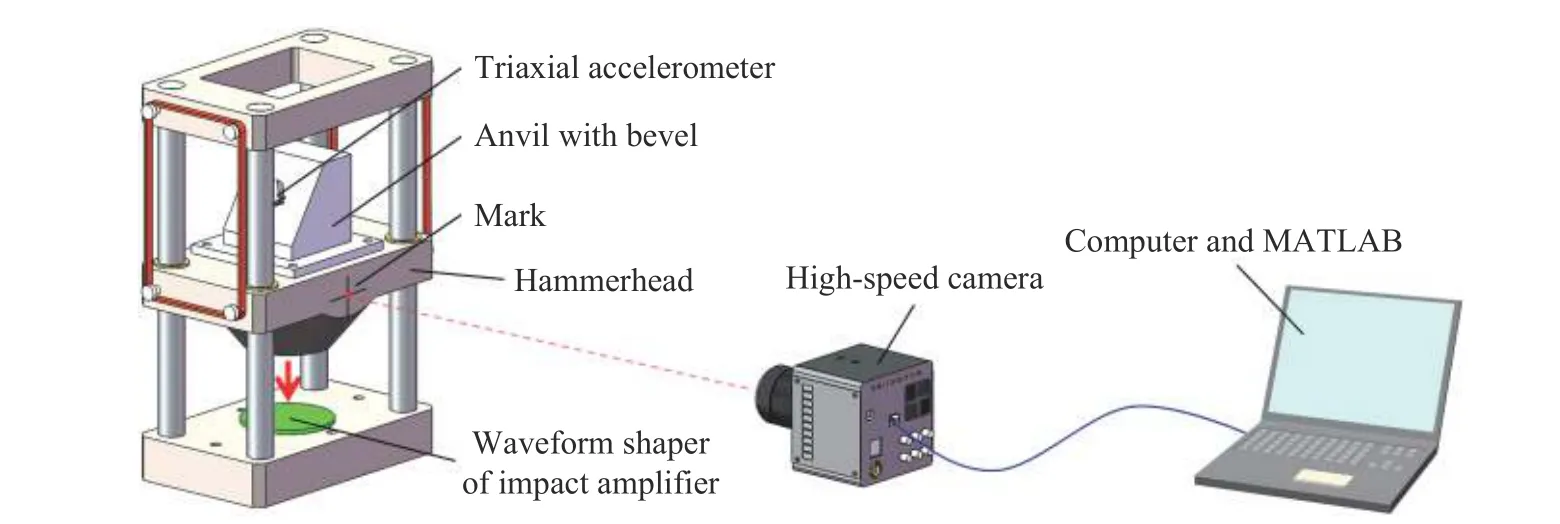
圖3 基于高速攝像機與MATLAB 圖像處理的加速度測量原理Fig.3 Schematic diagram of acceleration measurement based on a high-speed camera and MATLAB image processing
則錘頭沖擊波形整形器B 激勵的沿豎直方向的加速度aref關于時間的函數為:
1.3 基于最小二乘的線性解耦標定模型
最小二乘模型數學形式簡單、求解方便,廣泛應用于各類傳感器靈敏度系數的標定中[26-28]。以壓電式三軸加速度計為示例,采用最小二乘模型對其靈敏度系數進行標定。考慮三軸加速度計各敏感軸主靈敏度系數的同時,考慮各軸之間的耦合靈敏度系數,則三軸加速度計輸入與輸出間的關系為:
式中:Ai(i=x,y,z)表示i軸的加速度輸入;Qi(i=x,y,z)表示i軸的電荷輸出;Sij(i,j=x,y,z)表示靈敏度系數,特別地,當i=j時,Sii表示i軸的主靈敏度系數,當i≠j時,Sij表示j軸對i軸的耦合系數,j軸為輸入軸,i軸為輸出軸;εi(i=x,y,z)表示i軸線性擬合輸出與真實輸出之間的誤差。
考慮三軸加速度計的n組輸入與輸出,則式(5)可表示為:
或可表示為對應的矩陣符號形式:
式中:Q和A分別為輸出電荷矩陣和輸入加速度矩陣,S為靈敏度系數矩陣,ε為誤差矩陣。
滿足最小二乘原理的三軸加速度計靈敏度系數矩陣S*是使得誤差矩陣 ε 的2 范數最小的靈敏度系數矩陣S。而誤差矩陣 ε 的2 范數可通過矩陣的跡表示,即:
由于S*可被視為S的關于式(8)的極值,因此其可通過矩陣微分求駐點進行求解:
解得基于最小二乘的三軸加速度計線性解耦標定模型為:
2 實 驗
2.1 基于MATLAB 圖像處理的加速度測量有效性測試
在沖擊加速度計標定的相關標準中,除采用以激光干涉法為典型的絕對標定法外,文獻[29]還規范了與基準傳感器進行對比的相對標定法,即采用靈敏度系數已知且可靠的標準加速度計對標定過程中激勵的加速度量進行計量。此處即借用相對校準法思想對基于高速相機與MATLAB 圖像處理的加速度測量方法的有效性進行測試和驗證。
驗證實驗的硬件設置如圖4 所示,在沖擊放大器錘頭前端面粘貼一帶有色斑的貼紙和標尺條。選用貼紙中心處色斑用于錘頭加速度的測量,并記錄該色斑圓心處像素點的縱像素值隨拍攝時間的變化。標尺條用于標定高速攝像機視場中單位像素值的尺度。高速相機拍攝的典型圖像見圖5,分辨率為512×258。采用MATLAB 對高速相機拍攝的圖像進行處理,運行圖像處理程序,MATLAB 將以數字形式打開指定的一幀圖像,并出現隨鼠標移動的十字光標,如圖6 所示。此時,單擊鼠標即可返回十字光標交叉點處的橫向像素值Ph和縱向像素值Pv。于是,將光標縱向指示線與標尺條1 cm 刻度線對中(見圖6)并點擊,即可獲得1 cm 刻度線的橫向像素值,記為Ph1。類似地,可獲得9 cm 刻度線的橫向像素值,記為Ph9。1cm 刻度線與9cm 刻度線之間橫向跨越80mm。因此,單位像素值的尺度lp可通過下式計算:
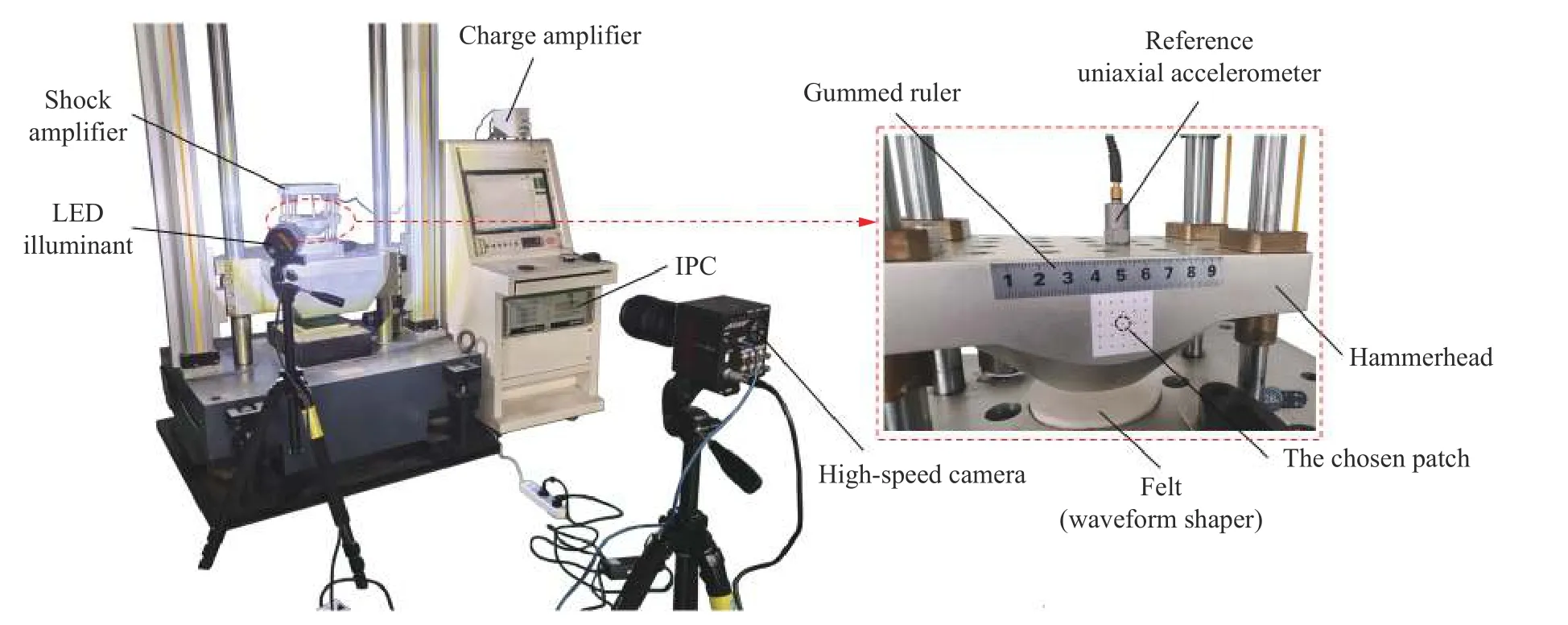
圖4 基于高速相機與MATLAB 圖像處理的加速度測量有效性測試實驗設置Fig.4 Experimental setup for validity test of acceleration measurement method based on high-speed camera and MATLAB image processing
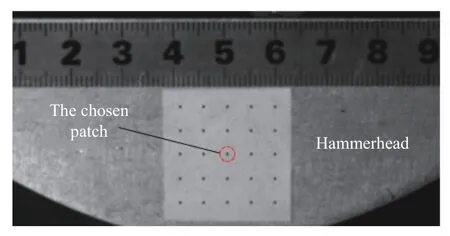
圖5 高速攝像機視場Fig.5 Field of view of high-speed camera
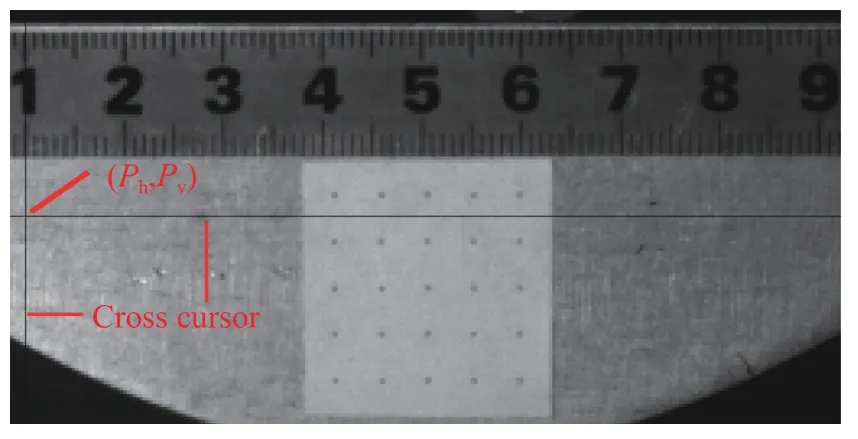
圖6 MATLAB 程序運行效果圖Fig.6 Rendering of MATLAB program running
需要說明的是,錘頭在激勵沖擊載荷的過程中,向下產生的位移會隨載荷幅值發生變化。因此,為使相機視場能夠拍攝錘頭激勵沖擊載荷的完整過程,需根據沖擊幅值在保證橫向分辨率盡量大的前提下,對視場的長寬比進行調整。但不同分辨率下,單位像素值尺度的標定原理與式(11)相同。
選取沖擊放大器錘頭撞擊波形整形器B 前后一段時間內高速相機拍攝到的一系列圖像,并對每一幀運行MATLAB 程序。每次運行程序時,將光標交叉點與貼紙中心色斑圓心處對齊后點擊,即可獲得中心色斑圓心處的像素值,如圖7 所示。以選取的第1 幀圖像為時間起點,記錄中心色斑圓心縱向像素值隨時間的變化,然后根據式(10)得到的單位像素值的尺度lp,即可得到錘頭沖擊波形整形器B 時的位移-時間曲線D(t) 。再由式(4),即可獲得錘頭沿豎直方向的加速度-時間曲線aref(t) 。所用標準加速度計粘貼于錘頭上表面中心處附近,如圖4 所示。將跌落沖擊時所獲得的錘頭加速度-時間曲線aref(t)與標準加速度計測得的加速度信號進行對比,即可對基于高速相機與MATLAB 圖像處理的加速度測量方法的有效性進行驗證。高速攝像機鏡頭沿水平方向正視于錘頭前端面,拍攝方向與錘頭前端面垂直,并采用直流強光LED 光源輔助拍攝,拍攝幀率為100 000 s?1。波形整形器A 采用硅橡膠,波形整形器B 采用毛氈。
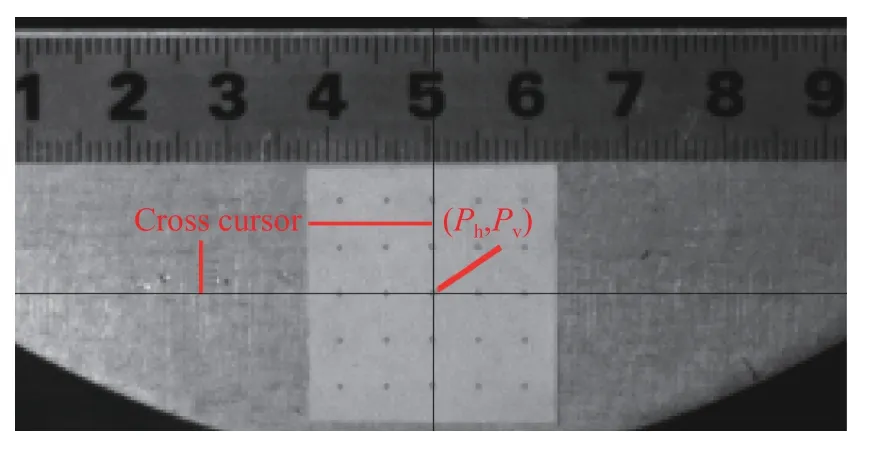
圖7 獲取標記點中心處像素值Fig.7 Obtainment of the pixel valueat the center of the marker point
2.2 單軸依次標定
實驗所采用的待標定三軸加速計見圖8。x、y、z指示加速度計的各敏感軸及方向,各敏感軸的量程均為2 000g。在對三軸加速計敏感軸x、y、z主靈敏度系數進行單軸依次標定時,加速度計的安裝姿態分別如圖9(a)~(c)所示。加速度計安裝于錘頭上表面中心處,且待標定軸的方向與錘頭上表面垂直。

圖8 待標定三軸加速度計Fig.8 Triaxial accelerometer to be calibrated

圖9 單軸依次標定中三軸加速度計的安裝姿態Fig.9 Mounting attitude of the triaxial accelerometer in sequential calibration for each sensitive axis
單軸依次標定時,對加速計敏感軸x、y、z各順序執行幅值約為200g、500g、1 000g、1 500g和2 000g的沖擊加載。然后,將各敏感軸的電荷量輸出關于輸入加速度進行線性擬合,從而得到加速度計各敏感軸的主靈敏度系數。
2.3 同步標定
同步標定中,三軸加速度計的安裝見圖10。首先,將設置有傾斜端面的砧座固定安裝于沖擊放大器錘頭的上表面,見圖10(a)。為保證加速度計旋轉角度 β (圖2)的準確性,同時使加速度計位于所述砧座斜端面的中心位置,設計了用于輔助旋轉和定位的輔助工裝,見圖10(b)。輔助工裝主體呈片狀結構,中間位置處設置有一切口,該切口的開口方向角度決定了加速度計的旋轉角度。安裝加速度計時,將其一角與輔助工裝切口精準配合,見圖10(c)。此時,輔助工裝會將加速度計定位于斜端面中心,同時保證加速計的旋轉角度精準可考。采用瞬干膠將加速度計固定后,即可去除輔助工裝,見圖10(d)。
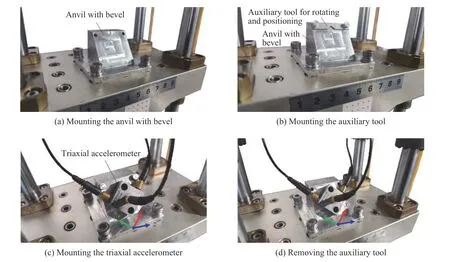
圖10 同步標定中加速度計的安裝過程Fig.10 Installation of the accelerometer in synchronous calibration
同步標定實驗中,砧座斜端面傾角 α (圖2)設置30°、55°兩種不同的角度,加速度計旋轉角度β 設置±30°、±45°、±60°等6 種不同的角度。將不同的傾角 α 、旋轉角度 β 兩兩組合,得到12 種不同的工況。在保證加速度計各個敏感軸均不超過量程的前提下,每一工況中至少對加速度計進行3 次不同幅值的沖擊加載。將所得加速度計各敏感軸的電荷輸出與相應的加速度輸入整理為矩陣形式,代入式(10),即可得到三軸加速度計包含主靈敏度系數與軸間耦合靈敏度系數的靈敏度矩陣。
為了對單軸依次標定和同步標定兩種不同的標定方法進行對比,同步標定實驗完成后,進行了3 組同步加載驗證實驗。驗證實驗不參與加速度計靈敏度系數的計算,以驗證采用不同方法標定后加速度計的泛化測量精度。
3 結果與分析
3.1 基于MATLAB 圖像處理的加速度測量有效性驗證
在圖4 所示基于高速相機與MATLAB 圖像處理的加速度測量有效性測試實驗中,依次進行了幅值分別為998g、2 134g、9 987g的測試。測試所得錘頭沖擊波形整形器B 前后的典型位移-時間曲線見圖11(a),圖中箭頭指示沖擊幅值處對應的位移和加速度。可以看出,在與波形整形器發生碰撞前和碰撞后,錘頭位移關于時間近似呈線性;而在與波形整形器發生碰撞時,錘頭位移關于時間呈現非線性。由式(4),在通過錘頭位移得到加速度的過程中,需要經過兩次微分運算。為避免因直接微分造成較大的數據震蕩而影響使用,采用圖11 所示方法對實驗數據進行處理。首先,對錘頭位移進行多項式(9 階)擬合,見圖11(b)。對擬合后的位移進行數值微分得到錘頭的速度-時間曲線。此時,再采用Boltzmann 函數對速度曲線進行擬合,見圖11(c),圖中箭頭指示速度減小至零時激勵的加速度達到幅值996g。對擬合后的速度進行微分即可得到錘頭的加速度-時間曲線。為減小擬合操作對最終數據的影響,兩次擬合的相關系數R需至少滿足R≥0.998。
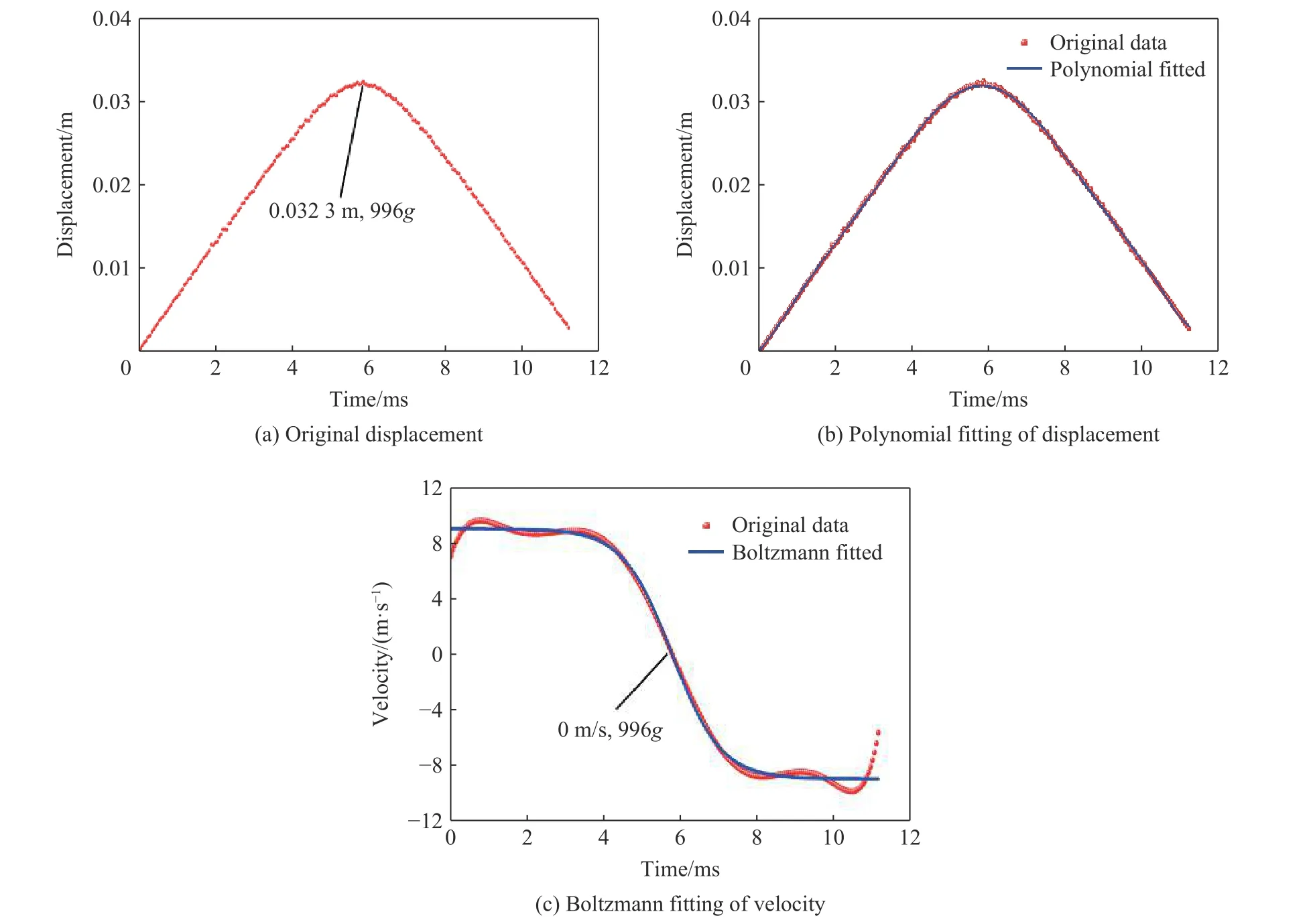
圖11 典型錘頭位移-時間曲線及數據處理方法Fig.11 Typical displacement-time curve of the hammer and the method of data processing
采用圖11 所示數據處理方法,得到3 組測試中標準加速度計輸出信號與相應MATLAB 圖像處理所得加速度信號如圖12 所示。標準加速度計與MATLAB 圖像處理所得信號的幅值對比則列于表1。3 組不同幅值的測試中,標準加速度計的輸出信號與MATLAB 圖像處理所得信號在曲線走勢與數值上均保持較高的一致性。在表1 所示的幅值對比中,3 組測試的幅值誤差最大為0.84%,最小為0.20%,均在1% 以下,說明基于高速相機與MATLAB 圖像處理的加速度測量方法具有有效性。另一方面,圖12 所示的3 種不同幅值的沖擊測試表明,圖1 所示的裝置可實現102g~104g較寬范圍內沖擊載荷的激勵。
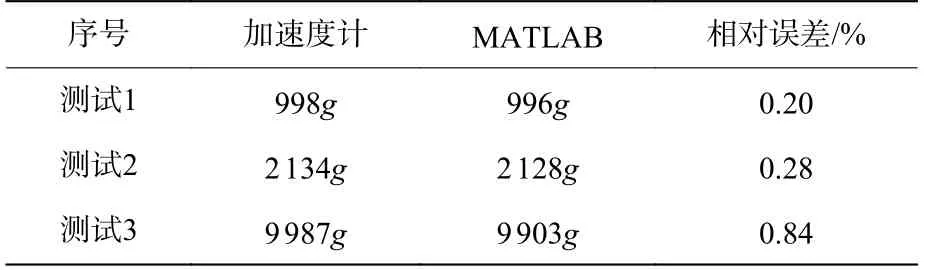
表1 加速度計輸出信號與MATLAB 圖像處理所得測量信號幅值對比Table 1 Amplitude comparison between accelerometer output and MATLAB image processing
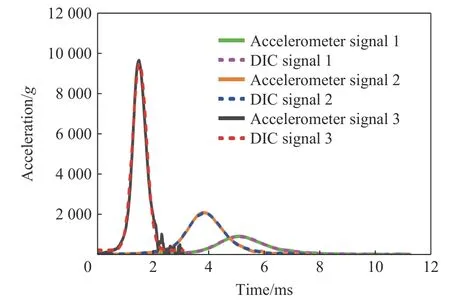
圖12 標準加速度計信號與相應MATLAB 圖像處理所得加速度信號對比Fig.12 Signal comparison between reference accelerometer and MATLAB image processing
3.2 標定結果及對比
三軸同步沖擊標定時所獲得的典型原始數據(α=55°,β=30°,aref=1281g)如圖13 所示,ax、ay、az分別為基于矢量分解原理得到的三軸加速度計敏感軸x、y、z的輸入加速度載荷,qx、qy、qz則分別表示各敏感軸的輸出電荷。由圖13,三軸加速度計各敏感軸的輸出電荷在數據趨勢上與相應加速度載荷的輸入基本保持一致,表明沖擊放大器錘頭上激勵的沿豎直方向加速度可真正被分解到空間三坐標軸方向,并被三軸加速度計的各敏感軸有效感知。這在一定程度上證明了基于矢量分解原理的三軸加速計同步沖擊標定的有效性。
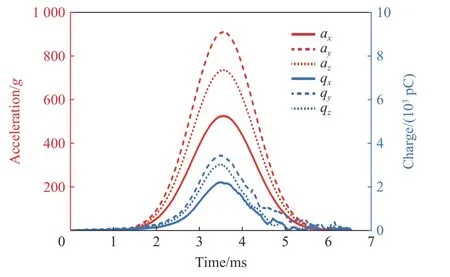
圖13 三軸同步沖擊標定的典型原始數據Fig.13 Typical original data obtained by three-axis synchronous shock calibration
單軸依次標定僅對三軸加速度計各敏感軸的主靈敏度系數進行標定,所得主靈敏度系數如表2 所示。同步標定對三軸加速度計各敏感軸的主靈敏度系數及敏感軸之間的耦合靈敏度系數進行標定,所得主靈敏度系數與軸間耦合靈敏度系數如表3所示。對比表2、表3 中的數據可得:采用同步標定法得到的三軸加速度計的主靈敏度系數不同于采用單軸依次標定法得到的主靈敏度系數,且同步標定法得到的主靈敏度系數相對較小。這意味著,采用不同方法對三軸加速度計進行標定可能會得到不同的測量結果與測量精度。

表2 單軸依次標定所得三軸加速度計主靈敏度系數Table 2 Main sensitivity coefficients of the triaxial accelerometer obtain from sequential calibration

表3 同步標定所得三軸加速度計主靈敏度系數與軸間耦合靈敏度系數Table 3 Main and coupling sensitivity coefficients of the triaxial accelerometer obtain from synchronous calibration
為了對采用不同方法標定后三軸加速度計的泛化測量精度進行對比,在同步標定實驗之后,進行了3 種不同工況下的驗證實驗。三組驗證實驗中,加速度計各敏感軸的輸入載荷見表4。同時,表4 中列出了采用單軸依次標定和同步標定后加速度計對輸入載荷的測量結果,而測量結果相對輸入值的偏差,如圖14 所示。圖14 中,橫軸坐標符號x、y、z表示加速度計敏感軸,其下標表示驗證實驗序號。由圖14,采用同步標定所得三軸加速度計的測量精度相對單軸依次標定加速度計的測量精度明顯較高。整體上,同步標定加速度計各敏感軸在不同工況下的測量誤差均處于2.0%以下。誤差對比結果表明,采用同步標定法對三軸加速度計進行標定可有效實現其測量精度的提升;因此,實際工程中三軸加速度計建議采用同步法進行標定。
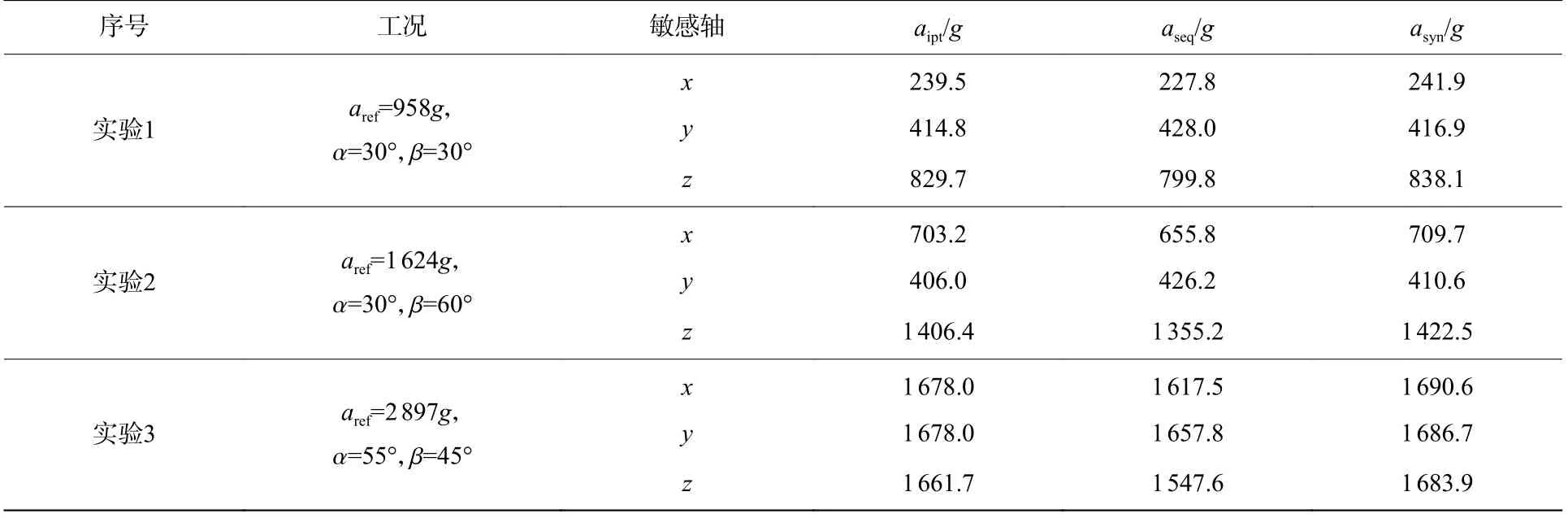
表4 驗證實驗工況及單軸依次標定與同步標定后加速度計的測量值Table 4 Conditions of the validation experiments and outputs of the accelerometer calibrated with sequential and synchronous method, respectively
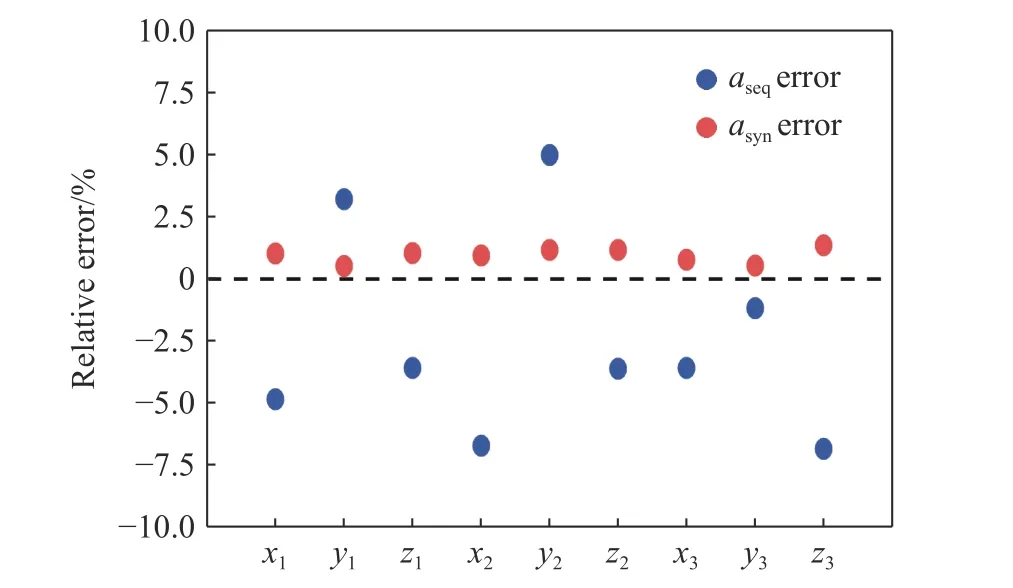
圖14 單軸依次標定加速度計測量結果 aseq 與同步標定加速度計測量結果 asyn 相對加速度輸入 aipt 的誤差及對比Fig.14 Error and its comparison of aseq which output from the accelerometer calibrated with sequential method andasyn which output from the accelerometer calibrated with synchronous method relative to acceleration inputaipt
3.3 結果分析與討論
三軸同步標定與單軸依次標定最大的不同在于,同步法能夠實現三軸加速度計的同步沖擊加載,而單軸標定只能在其余兩軸受載為零的前提下實現三軸加速度計的單軸加載。實際工程中,三軸加速度計所面臨的載荷環境通常為三軸同步沖擊載荷,而同步載荷工況下多軸傳感器各敏感軸之間的耦合關系可能與單軸載荷工況下并不相同,甚至表現出較大差異。因此,僅能實現單軸加載的單軸依次標定方法難以獲得三軸加速度計同步受載時的軸間耦合關系,甚至無法對軸間耦合進行描述。而三軸同步標定方法不僅考慮了各軸之間的耦合關系,而且能夠在同步受載的情況下對三軸加速度計各軸間的耦合系數進行標定,因此可以更為準確地表征三軸加速度計的靈敏度關系。所以,三軸同步標定可使三軸加速度計獲得更高的測量精度。
在建立的三軸加速度計同步沖擊標定方法中,對標定精度造成影響的因素主要來自以下兩方面:MATLAB 圖像處理造成的錘頭加速度測量誤差以及基于矢量分解的三軸同步加載機制中砧座斜端面傾角 α 與加速度計旋轉角度 β 測量誤差。對于MATLAB 圖像處理造成的測量誤差可通過提升高速相機的分辨率和拍攝幀率等得到改善,而斜端面傾角 α 與加速度計旋轉角度 β 的測量誤差只能通過提高加工精度和裝配精度進行改善。另一方面,本文圖像處理方法中所采用的圖像處理程序雖然簡單易用,但并無批量處理能力,可能使得該方法在時間或人力成本上有所提升。因此,在實際應用中并不限于本文所采用的方法,任何在精度和效率上被證明占優的圖像處理方法均可被優先考慮采用。
4 結 論
采用裝配有沖擊放大器的跌落臺與矢量分解原理,提出了一種三分量沖擊載荷同步激勵方法并建立了相應裝置,實現了對三軸加速度計的同步沖擊加載;采用高速相機與MATLAB 圖像處理,對沖擊標定過程中加速度計敏感軸的輸入加速度進行了計量;基于最小二乘法,對同步標定中三軸加速度計的靈敏度系數矩陣進行了求解計算;對同步標定與單軸依次標定后三軸加速度計的測量精度進行了對比。通過上述工作得到結論如下。
(1)基于矢量分解原理的同步沖擊載荷激勵方法可實現三軸沖擊載荷的同步激勵與三軸加速度計的同步沖擊加載。
(2)基于高速攝像機與MATLAB 圖像處理的運動測量方法作為一種絕對光學測量法應用于加速度計沖擊標定中對輸入加速度的追溯和計量具有可行性與有效性。
(3)配合沖擊放大器,常規跌落臺裝置可實現102g~104g寬范圍內加速度計的沖擊標定。
(4)同步標定法相比單軸依次標定法可實現三軸加速度計測量精度的提升。工程實際中,三軸加速度計建議采用同步法進行標定,以保證測量結果的準確性和可靠性。
感謝感謝揚州英邁克測控技術有限公司為本研究提供待校準三軸加速度計。