便攜式水下機器人系統(tǒng)設計與實現(xiàn)
2023-07-29 11:00:20湯奇榮崔國華
自動化與儀表 2023年7期
關鍵詞:設計
孫 棟,湯奇榮,李 江,崔國華
(1.上海工程技術大學 機械與汽車工程學院 智能協(xié)作機器人研究所,上海 201620;2.同濟大學 機械與能源工程學院 機器人技術與多體系統(tǒng)實驗室,上海 201804)
全球范圍內(nèi),糧食消費需求的快速增長和陸地生態(tài)環(huán)境承載力不匹配的矛盾日益突出[1],急需全方位、多用途開發(fā)食物資源,以滿足現(xiàn)在和未來的嚴峻挑戰(zhàn)[2]。地球表面71%的面積都被水所覆蓋,為人類的食物供給提供了巨大前景。《2022 世界漁業(yè)和水產(chǎn)養(yǎng)殖狀況》報告指出,隨著水產(chǎn)養(yǎng)殖業(yè)的顯著增長,全球漁業(yè)和水產(chǎn)養(yǎng)殖產(chǎn)量創(chuàng)下歷史新高,水產(chǎn)食品對保障21 世紀的糧食安全和營養(yǎng)做出了重要貢獻[3]。但依靠人力的傳統(tǒng)粗放式生產(chǎn)方式存在危險性高、代價昂貴、效率低下等問題,特別是在漁業(yè)環(huán)境檢測和生物行為監(jiān)視領域,需要大力推進漁業(yè)智能裝備的科技創(chuàng)新,發(fā)展水下機器人技術[4]。
水下機器人是一種要求學科交叉性強、技術先進性高的綜合系統(tǒng),可以在部分漁業(yè)模式中發(fā)揮出很大優(yōu)勢。對此,大量國內(nèi)外專家學者和機構對此做了深入研究。文獻[5]為支持因東日本大地震而受損的漁業(yè),開發(fā)了一臺應用于清潔沉積物的水下機器人原型;文獻[6]針對廢棄漁具在無人控制的情況下,繼續(xù)工作導致水生生物死亡的問題,提出了一種綜合解決方案,并開發(fā)了一個帶光學收發(fā)器的便攜式AUV(autonomous underwater vehicle)。GLIDER項目通過使用3 臺帶有高性能傳感器的水下機器人,對高產(chǎn)大陸架區(qū)的浮游動物進行持續(xù)聲學監(jiān)測,以便充分了解海洋中浮游生物和漁業(yè)產(chǎn)量的相關性[7]。國內(nèi)在該領域起步較晚,但是經(jīng)過科研人員的努力也取得了一定成果。中國水產(chǎn)科學研究院于2018 年對多個水下機器人系統(tǒng)進行研究和優(yōu)化,并模擬水下環(huán)境對樣機完成了耐壓、運動等試驗[8]。文獻[9]設計了一款漁業(yè)養(yǎng)殖水下機器人,可以完成多項水質(zhì)參數(shù)的檢測任務。雖然現(xiàn)在已經(jīng)出現(xiàn)了一些性能卓越的水下機器人,但是因為其高額的制造和使用成本無法廣泛應用,而很難產(chǎn)生較高的經(jīng)濟價值。
本文結合近淺海水產(chǎn)養(yǎng)殖業(yè)中檢測、預警等任務,設計開發(fā)了成本低廉、操作簡單的便攜式水下機器人。利用模塊化可重構的設計思想,搭載不同的功能模塊,可以使水下機器人具備實時監(jiān)測水體環(huán)境質(zhì)量、跟蹤監(jiān)視水生動物等多種不同的功能。該水下機器人的設計不僅為水產(chǎn)養(yǎng)殖業(yè)的自動化進程提供了新思路,且將會很大程度提高水產(chǎn)食品的產(chǎn)量和質(zhì)量。
1 整體設計方案
考慮到應用場景和任務需求,將以模塊化、可重構的思想來設計整體結構和布局,如圖1 所示。
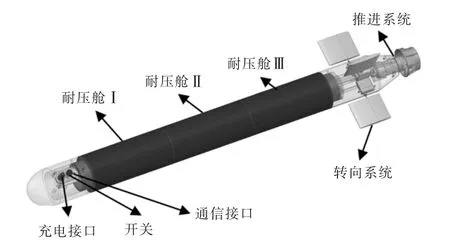
圖1 便攜式水下機器人系統(tǒng)構成Fig.1 System composition of portable underwater vehicle system
所設計便攜式水下機器人應滿足以下要求:①最大下潛深度大于50 m,支持深水域水產(chǎn)養(yǎng)殖;②整體質(zhì)量小于25 kg,便于運輸和布放,回收簡單;③最大航速大于2 kn,操作靈活,保證工作效率;④產(chǎn)生的最大噪聲小于60 dB,以免對水生生物造成驚擾,不便于近距離觀察。
2 艇體外形與結構優(yōu)化
2.1 機器人基本外形
本文選擇Nystrom 型作為便攜式水下機器人基本外形,從水動力分析結果可得,Nystrom 型包絡體積大,且在水中航行時受到的阻力較小。進一步,利用基于擁擠距離的多目標粒子群優(yōu)化算法進行優(yōu)化設計[10]。具體地,在艇體外形優(yōu)化模型中,水阻力和包絡體積的倒數(shù)被定義為優(yōu)化變量,艏艉段長度與水下機器人總長之比和艏艉部形狀系數(shù)為設計變量。艇體外形優(yōu)化結果如圖2 所示。
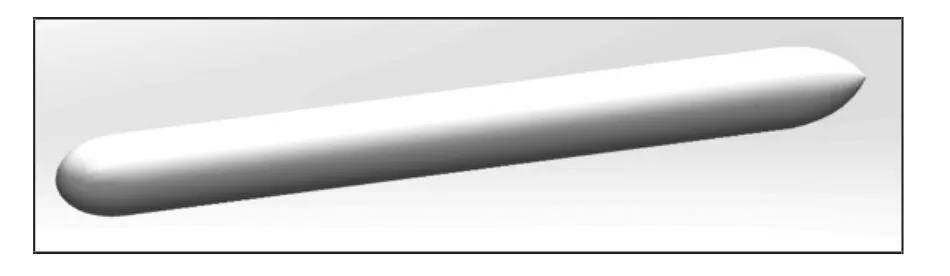
圖2 水下機器人艇體外形優(yōu)化結果Fig.2 Optimization results of hull shape of underwater vehicle
2.2 艙體設計與校核
考慮到便攜式水下機器人的尺寸和結構特性,將艇體耐壓艙直接作為控制艙殼體。如圖3 所示,為方便實現(xiàn)重構,對耐壓艙進行分段式設計,同時也將大大降低其加工難度。特別的,該方法可以搭載不等數(shù)量的艙段,并通過接入不同功能的傳感器和負載設備,以滿足不同環(huán)境下的多種任務需求。該機器人尺寸和結構簡單,可通過單人單艇實現(xiàn)布防和回收。

圖3 耐壓艙體結構和組成Fig.3 Structure and composition of pressure tank
在選擇耐壓艙外殼材料時,不僅要計算水下靜壓力和隨機浪流的不確定載荷,還要考慮加工工藝和成本。通過對常用材料的比強度、比剛度、彈性模量、屈服極限等數(shù)值的對比,決定采用鋁合金6061作為耐壓艙殼體材料。
為保證所設計便攜式水下機器人可在水下正常工作,不發(fā)生強度破壞或屈曲失穩(wěn)問題,對耐壓艙體進行強度校核計算,可靠性計算公式為
式中:Ri為便攜式水下機器人耐壓艙殼體的外半徑;Ro為內(nèi)半徑;P 為機器人在水下所受最大壓力;σ 為鋁合金6061 的屈服極限。
計算可得,所設計便攜式水下機器人在最大潛深下,至少可承受1.1 倍靜水壓力。
為進一步保證其耐壓性能,在理論計算的基礎上,進行仿真驗證。仿真結果如圖4 所示,耐壓艙殼體最大變形僅為0.0362 mm,位于中間部分,不會造成漏水或者內(nèi)部元器件被擠壓導致?lián)p壞;最大壓強為47.4 MPa,遠小于鋁合金6061 的屈服極限,滿足強度要求。

圖4 耐壓艙體結構和組成Fig.4 Structure and composition of pressure tank
2.3 動力執(zhí)行機構布局與選擇
為降低制造成本,減少航行過程中對水生生物的負面影響,整體采用對稱結構,在艉部設置單推進器和4 個舵機作為動力執(zhí)行機構,如圖5 所示,以實現(xiàn)機器人進退、俯仰及偏航等位置和姿態(tài)調(diào)整。

圖5 推進器與舵機分布Fig.5 Distribution of thrusters and steering gear
推進系統(tǒng)是水下機器人的主要動力來源,由電機、螺旋槳、導流罩等組成。電控部分安裝在耐壓艙內(nèi),電機通過橡膠墊片與艉部浮力材固定。另外,導流罩可使尾流最大程度地匯聚,屏蔽一定噪聲和增強有效推力。
水下機器人在航行過程中通過調(diào)節(jié)水平舵和垂直舵的角度來實現(xiàn)俯仰和偏航控制,具體由同一平面的舵機經(jīng)連接桿帶動舵板同步轉動實現(xiàn)。與推進系統(tǒng)類似,電控部分安裝在耐壓艙內(nèi),電機通過環(huán)氧樹脂膠與艉部浮力材固定。
3 電控系統(tǒng)設計
3.1 功能架構
如圖6 所示,機器人的電控系統(tǒng)按功能劃分,可分為感知層、通信層、決策層、控制層和執(zhí)行層。

圖6 電控系統(tǒng)的功能劃分Fig.6 Function division of electric control system
3.2 硬件設計
電控系統(tǒng)核心為STM32 系統(tǒng),主要負責規(guī)劃、計算、信息處理與存儲等,其通過LoRa 無線模塊,將從水下雙目相機或側掃聲吶采集到的目標和環(huán)境信息傳遞給其它機器人系統(tǒng)或相應水下設備。IMU 和數(shù)字磁羅盤分別用以獲取艇體3 個自由度方向的位移值和角度值。浸水傳感器用以檢測控制艙內(nèi)是否發(fā)生漏水,一旦發(fā)生漏水,立即通過通信系統(tǒng)向上位機發(fā)出警報,防止造成損失。機器人在執(zhí)行水質(zhì)檢測任務時,利用攜帶的溫度傳感器、pH傳感器、溶解氧傳感器等對水質(zhì)信息進行采集,相關信息可暫時被存放在信息存儲系統(tǒng)。
該控制系統(tǒng)框架簡單,不需要搭載復雜、昂貴的電子元器件,通過與整艇結構相互配合,成本較于市面上已經(jīng)量化生產(chǎn)的水下機器人約降低30%。
4 樣機驗證實驗
完成便攜式水下機器人設計、加工及裝配后,對樣機進行性能測試。
4.1 密封性測試
目前一般密封技術已經(jīng)比較成熟,但由于材料選型、加工和裝配誤差、磨損腐蝕等多種情況的影響,水下機器人達到完全可靠的密封存在一定困難。
利用正壓測試方法,通過水密接插件預留接口,向耐壓艙內(nèi)注入一定壓力的氣體,保持艙內(nèi)氣壓為0.86 N/m2。50 min 后,艙內(nèi)氣壓沒有發(fā)生明顯下降現(xiàn)象,可證明該耐壓艙密封性能完好。
4.2 耐壓性測試
為進一步驗證耐壓艙可靠性和靜力分析的正確性,按照《超高壓容器安全技術監(jiān)察規(guī)程TSGR0002-2005》,模擬水下高壓環(huán)境進行分段式實體測試。
便攜式水下機器人艙體耐壓性能的測試過程,如圖7 所示。在保壓階段,壓力表數(shù)值未有驟降的情況;測試結束后,耐壓艙殼體未有變形或配合問題出現(xiàn);將耐壓艙體完全打開后,觀察殼體內(nèi)部和密封圈周圍,未發(fā)現(xiàn)水漬;最后重復進行氣密性測試實驗,艙內(nèi)氣壓未有發(fā)生明顯下降現(xiàn)象。根據(jù)以上結果,可證明實驗有效,耐壓艙的耐壓性能符合設計要求。

圖7 艙體耐壓性能測試過程Fig.7 Test process of pressure resistance of cabin
4.3 平衡性測試
為確保便攜式水下機器人在靜水中處于中心軸線平衡狀態(tài),要求其艙體和控制艙內(nèi)各設備的重力與艙體所受浮力能夠抵消,且對中心點力矩之和為0。由于設備總重量過大,出現(xiàn)浮力不足的情況,通過設置艏艉部浮力材結構進行補償。
平衡性測試實驗如圖8 所示,通過靜水測試情況可進一步完善浮力材的設計與布局方案,使控制艙在滿負載的情況下能夠保持平衡。
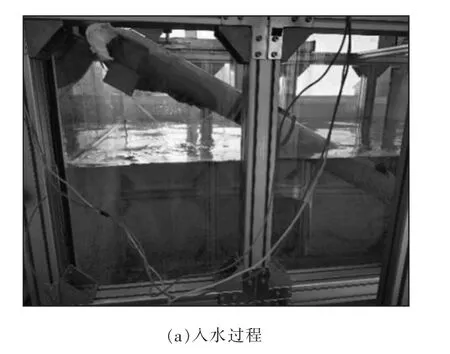
圖8 便攜式水下機器人平衡性測試實驗Fig.8 Balance test experiment of portable underwater vehicle
5 魚群監(jiān)測視景展示
根據(jù)設計開發(fā)的水下機器人,通過半物理仿真與視景平臺的二次集成,可以實時顯示水產(chǎn)養(yǎng)殖場中魚群的健康與成長狀況。
本文基于Webots 仿真軟件,自主搭建模擬魚塘的虛擬世界,利用所設計水下機器人進行漁情觀測、巡邏及監(jiān)視作業(yè)仿真。具體地,等比例縮小20 m×20 m 的正方形魚塘,水深為5 m,在魚塘中對典型淡水魚進行適當密度混養(yǎng),列出了其中的部分魚種,如圖9 所示。

圖9 魚塘中的部分魚種Fig.9 Some fish species in fish pond
在仿真平臺中,通過完善物理引擎,搭建關于流體力學、渦輪噪聲、動態(tài)碰撞等的物理模型。在仿魚塘的虛擬世界中,置入多條不同種類的淡水魚,并不間斷隨機游動。然后布置一臺便攜式水下機器人,通過設計基于指數(shù)趨近律的滑模變結構控制器,以解決該機器人非線性特點和水下不確定干擾的影響,提高作業(yè)的精度和效率。如圖10 所示,該水下機器人通過攜帶的視覺系統(tǒng)獲取魚群狀態(tài),對養(yǎng)殖魚進行實時監(jiān)視。

圖10 魚塘虛擬環(huán)境Fig.10 Virtual environment of fish pond
通過仿真結果可得,所設計便攜式水下機器人可較好地完成對魚群的巡邏及監(jiān)視任務,且容易融入水生物環(huán)境。該水下機器人可廣泛應用于水產(chǎn)養(yǎng)殖業(yè),對于推進漁業(yè)智能裝備的科技創(chuàng)新有一定積極作用。
6 結語
本文針對當前水產(chǎn)養(yǎng)殖業(yè)中水質(zhì)檢測和水生物監(jiān)視任務需要耗費大量人力物力的問題,設計了便攜式水下機器人。基于模塊化設計的思想,對于基本外形、耐壓艙體、動力執(zhí)行機構進行了一系列的設計與優(yōu)化;同時完成了以STM32 為核心的電控系統(tǒng)設計,包括控制邏輯框架及具體硬件選擇。相比較現(xiàn)有的水下機器人,所設計便攜式水下機器人具有制造和使用成本低、方便維修、操作簡單和機動性強等優(yōu)勢,可滿足現(xiàn)代化漁業(yè)的全水域實時信息采集需求。最終在完成所研制水下機器人的安全性和運動性能驗證的基礎上,基于Webots 搭建了仿魚塘的虛擬世界,對魚群巡邏、監(jiān)視任務過程進行了視景展示。
猜你喜歡
河北畫報(2020年8期)2020-10-27 02:54:06
現(xiàn)代裝飾(2020年7期)2020-07-27 01:27:42
流行色(2020年1期)2020-04-28 11:16:38
電子制作(2019年19期)2019-11-23 08:41:36
電子制作(2019年15期)2019-08-27 01:11:50
電子制作(2019年7期)2019-04-25 13:18:16
藝術啟蒙(2018年7期)2018-08-23 09:14:18
海峽姐妹(2017年7期)2017-07-31 19:08:17
Coco薇(2017年5期)2017-06-05 08:53:16
商周刊(2017年26期)2017-04-25 08:13:04
