仿生輪腿式爬梯底盤結構設計分析與應用
2023-07-29 11:00:32馮長龍行志剛李樹平
自動化與儀表 2023年7期
馮長龍,行志剛,程 軍,李樹平
(1.河南理工大學 機械與動力工程學院,焦作 454000;2.河南理工大學 創新創業學院,焦作 454000)
國內對智能爬樓裝置的研究起步較晚,經過多年來不斷地研究探索,雖然也取得了一些理論研究成果,但距離轉換為成熟商品還有很大的距離[1]。文獻[2]提出的升降式爬梯機構能夠適應較為常見的樓梯結構,動作簡單,但是體積龐大,動作幅度大,且工程實踐能力弱,缺乏一定的穩定性;文獻[3]提出的行星輪式結構通過對爬樓輪的改裝,使其形狀發生變化。但是在行進過程中裝置缺乏制動功能,車輪易打滑,安全性大大降低;文獻[4]提出的連桿式結構采用了較為穩定的連接桿式的結構設計,但在爬梯行進過程中其動力需求較高并且消耗較高。對于以上分析,可知對于新型爬梯裝置其安全性、重心的偏移問題、靈活性、動力供給等問題都是該類裝置的研發要點。文章以上述問題為切入點,研發了一款集爬臺階、越寬壕、克垂壁的仿生輪腿式爬梯底盤。
1 機械結構方案設計
1.1 裝置整體方案設計
裝置總體三維結構圖如圖1 所示,仿生輪腿式爬梯底盤結構由機架、連桿展翼機構、轉動臂機構、后置升降機構4 大部分組成。爬梯第1 階段:采用連桿展翼機構,模擬人體上樓梯時需提升腿部至空中的動作,其包含水平線位移、角位移;爬梯第2 階段:利用轉動機構,模擬提升腿部后進行腿部搖擺(角位移)至臺階上空的運動;爬梯第3 階段:通過后置升降機構,模擬人體完成腳掌踏步(垂直線位移)至臺階面的過程。同時,運用機架為三項運動機構等提供徑向和軸向載荷,使仿生輪腿式爬梯底盤更加穩定。
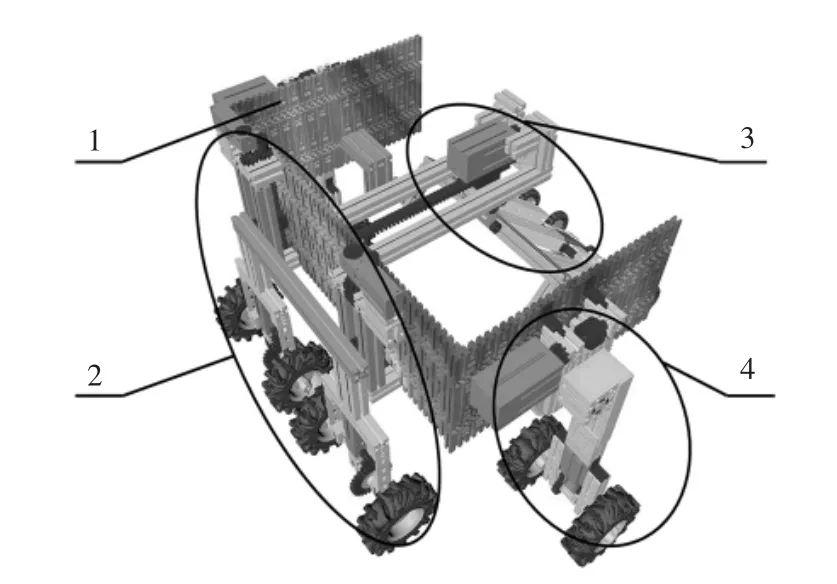
圖1 裝置總體三維結構圖Fig.1 Overall three-dimensional structure of the device
1.2 連桿展翼機構
連桿展翼機構由絲杠滑塊結構、限位轉動軸、雙連桿結構、展翼結構、電機和行走輪組成。爬梯第1 步驟時,連桿展翼機構利用電機驅動的絲杠滑塊機構,實現雙連桿結構通過線位移帶繞限位轉動軸完成角位移。前排2 組行走輪借助電機通過齒輪傳動完成運動,其在保證抓地力的同時又能為底盤結構提供動力,有效防止了空轉。限位轉動軸限制了動翼展結構的圓周運動,保證了連桿展翼機構的平穩運動狀態。
1.3 轉動臂機構
轉動臂機構由機架、蝸輪蝸桿結構、電機、擺臂和行走輪組成。整個機構可為仿生輪腿式爬梯底盤提供力學支撐和動力支持。爬梯第2 步驟時,轉動臂機構等利用電機驅動的蝸輪蝸桿結構,實現與蝸輪相對固連的擺臂和行走輪提在豎直平面內完成轉動,進而使仿生輪腿式爬梯底盤的重心前移,由連桿展翼機構和后置升降機構為底盤提供穩定性支持。同時,采用蝸輪蝸桿的傳動結構,優點在于其自鎖功能,保證機構運動的安全性[5]。電機借助齒輪傳動,使兩行走輪接觸臺階面后達到同步即停、即轉的效果。
1.4 后置升降機構
后置升降機構由機架、絲杠滑塊結構、電機和行走輪等組成。爬梯第3 步驟時,升降機構借助電機提供的動力驅動絲杠旋轉,使絲杠上的滑塊上下運動,進而實現固連在滑塊上的2 組并聯后置行走結構在垂直方向完成線位移。在運動過程中,后置升降機構與連桿展翼機構和轉動臂機構相互配合,實現在爬梯等越障過程中自適應調節底盤面保持恒水平穩定狀態,為工程實踐應用提供強有力技術保障。
2 靜力學仿真
將已完成建模的仿生輪腿式爬梯底盤結構各局部裝置三維建模導入Altair Inspire 仿真軟件中,對每一部分進行有限元劃分,并添加合適的載荷工況[6]。
2.1 二連桿裝置力學仿真
通過與實際分析對比,對二連桿裝置施加約束和扭矩。如圖2 所示,通過在二連桿裝置上部連接孔a 處施加大小為700 N·m 的扭矩,模擬裝置受到旋轉支架所作用的扭矩。在裝置下部b、c、d、e 4 個等效孔洞中,對其添加約束,其具體施加情況如圖2(a)所示。
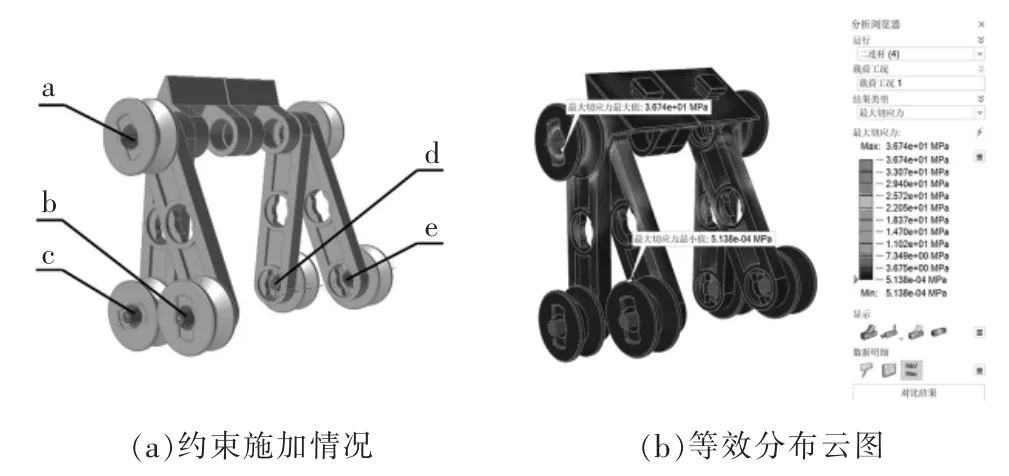
圖2 二連桿裝置力學仿真結果Fig.2 Mechanical simulation results of two-rod connecting device
二連桿裝置的等效分布云圖如圖2(b)所示,其最大應力為36.7 MPa,應力遠遠小于其屈服極限,則不需對其進行額外強化處理。在上部連接孔a 處,其應力相較其它位置更大。
2.2 升降軸裝置力學仿真
通過與實際分析對比,對升降裝置進行簡化處理,提取其中心兩裝配齒輪軸來替代完整升降軸工作效應。如圖3 所示,在兩齒輪軸光滑圓柱表面a施加大小為700 N·m 大小的扭矩,以來模擬電機轉動時帶來的扭矩。由于兩齒輪表面所在平面在齒輪軸工作時保持不變,故在兩齒輪正面b 施加固定約束,其具體的施加情況如圖3(a)所示。
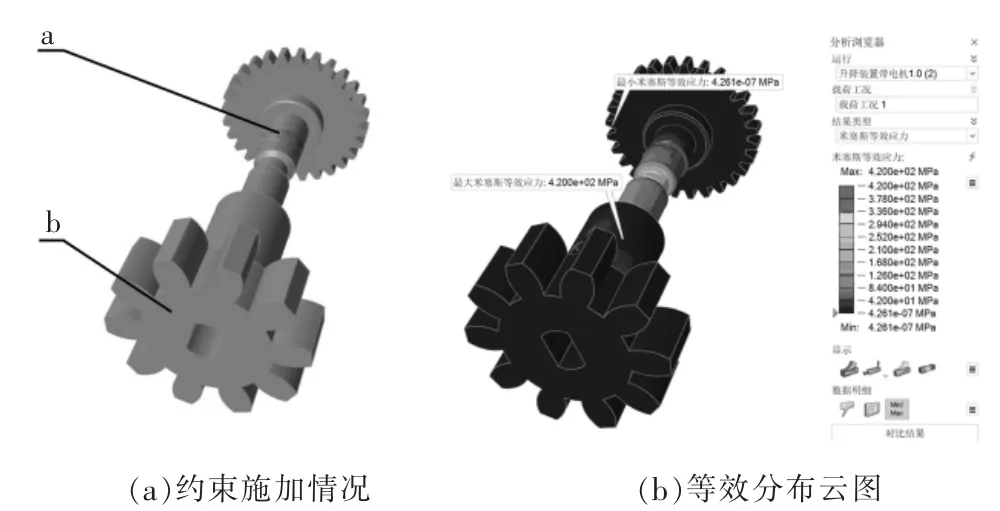
圖3 升降軸裝置力學仿真結果Fig.3 Mechanical simulation results of lifting shaft device
升降軸裝置的等效分布云圖如圖3(b)所示,其最大應力為42 MPa,應力小于其屈服極限。在兩齒輪軸與細桿交界處,其應力相較其它位置更大。
2.3 中轉臂裝置仿真
通過與實際分析對比,對中轉臂裝置進行簡化處理,提取其中心兩裝配蝸輪蝸桿和相連齒輪軸來替代完整中轉臂裝置工作效應。如圖4 所示,在蝸輪中心孔a 處施加大小為700 N·m、方向為順時針的扭矩。對蝸輪光滑表面b 施加固定約束,其具體的施加情況如圖4(a)所示。
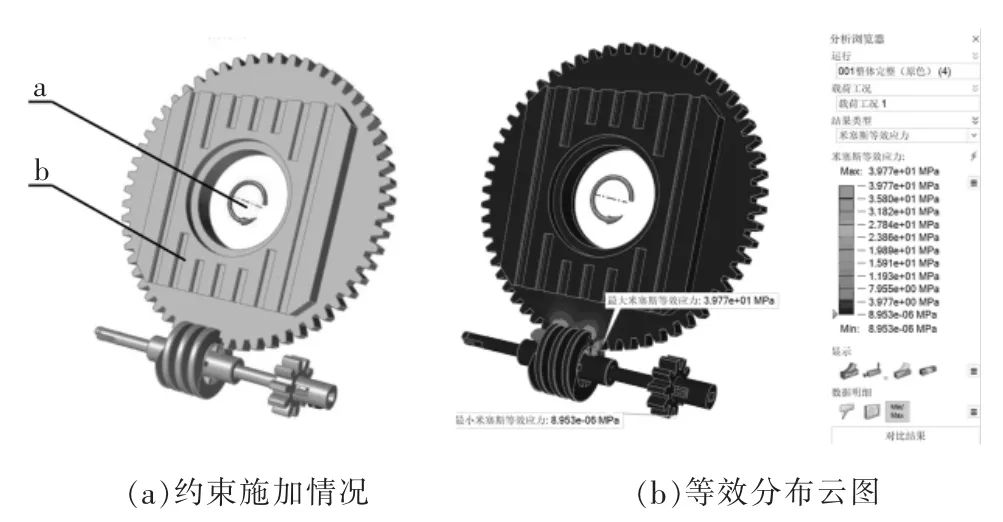
圖4 中轉臂裝置力學仿真結果Fig.4 Mechanical simulation results of the rotating arm device
中轉臂裝置的等效分布云圖如圖4(b)所示,其最大應力為39.8 MPa,應力小于其屈服極限。在蝸輪蝸桿嚙合處,其應力相較其它位置更大。
3 運動學仿真
將建立好的爬梯底盤模型導入到ADAMS 中并添加約束以及驅動。在蝸桿、蝸輪之間添加齒輪副,滑塊絲杠之間添加螺旋副,輪子和光軸之間添加轉動副,連桿之間添加轉動副,電機軸添加驅動,仿真步長設置為0.05。通過對底盤各個部位的運動學仿真,驗證運動的可行性[7]。
3.1 連桿展翼機構運動仿真分析
展翼角度-滑塊線位移仿真結果如圖5 所示。實線為滑塊隨絲桿運動在x 軸方向上的線位移曲線,其近似為一條對折直線,說明滑塊隨絲桿的轉動保持勻速直線運動、運動平穩且無卡結現象;虛線為展翼機構轉動的角度變化曲線,角度變化范圍為0°~40°,曲線光滑可導,說明展翼機構轉動過程平滑且無明顯速度突變。
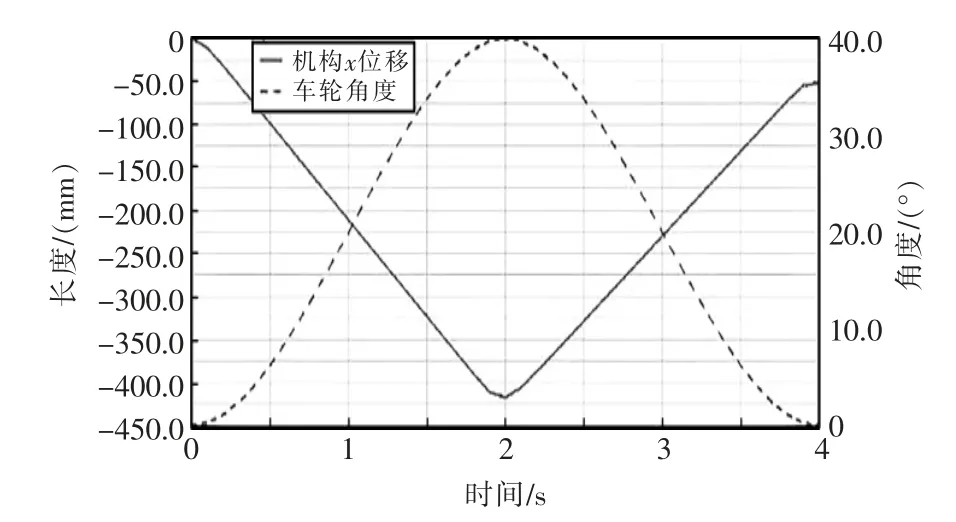
圖5 展翼角度-滑塊線位移仿真結果Fig.5 Simulation results of spread wing angle-slider line displacement
3.2 行進輪攀越臺階運動仿真分析
行進輪攀越臺階運動仿真結果如圖6 所示。曲線1 為前輪中心運動曲線、曲線2 為中輪中心運動曲線、曲線3 為后輪中心運動曲線。行進輪0~0.5 s在臺階水平面做直線運動;0.5~0.7 s 時,通過連桿帶動展翼機構繞限位轉動軸轉動使前輪抬升,底盤整體前移至前輪位于第1 階樓梯踏步面上;1.2~1.3 s時,通過轉動臂轉動使中輪抬升,中輪位于臺階上;1.6~1.7 s 時,通過絲桿傳動使升降機構上升,后輪位于臺階上,3 組輪交替攀越臺階。其中,行進輪未抬升的時間段內各條曲線的波動值近似為0,說明爬梯過程中底盤運動平穩。
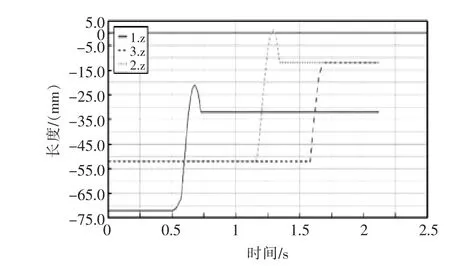
圖6 行進輪攀越臺階運動仿真結果Fig.6 Simulation results of climbing steps of traveling wheel
3.3 底盤結構負載運動質心仿真分析
如圖7 所示,文章為研究仿生輪腿式爬梯底盤負載狀態下的越障性能,故向底盤中心施加除重力外大小為700 N 的載荷進行仿真分析,得到底盤結構爬樓梯時質心在Z 方向位移-速度分量隨時間變化關系。圖7 中實線為質心變化曲線,虛線為速度變化曲線,底盤在0~0.5 s 和1.4~2.5 s 內進行勻速運動。結合圖7 可知,0.5~0.7 s 前輪抬升,后方行進輪動力不變時,整體速度降低,此與圖7 中0.5~1.0 s速度變化相對應,進一步驗證了運動的可靠性。底盤運動速度的變化由行進輪的交替抬升造成,圖7中各時間段虛線近似直線,說明攀越臺階時行進輪規律性控制速度。實線在各時間內近似直線,說明底盤在質心抬升階段時平緩抬升的性質。
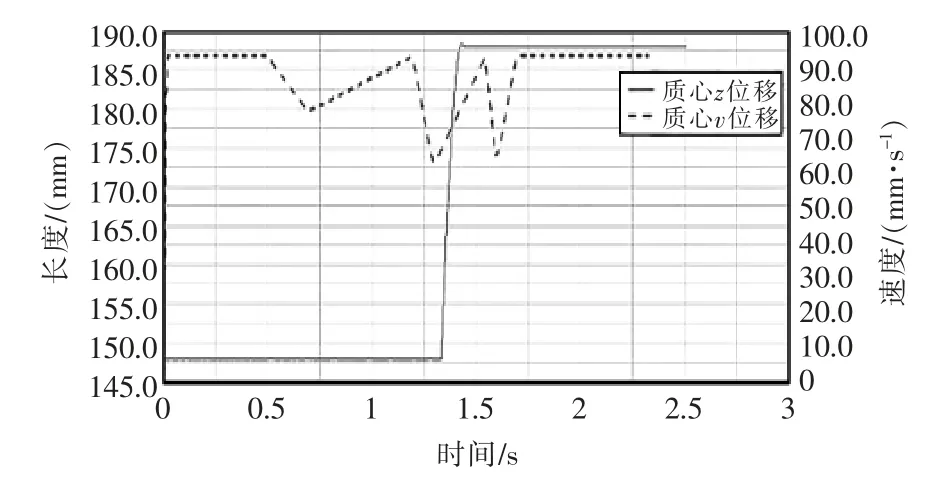
圖7 爬梯過程底盤結構質心位移-速度仿真結果Fig.7 Simulation results of center of mass displacementvelocity of chassis structure during ladder climbing
4 控制邏輯方案設計
4.1 控制邏輯圖的設計
仿生輪腿式爬梯底盤控制邏輯如圖8 所示。
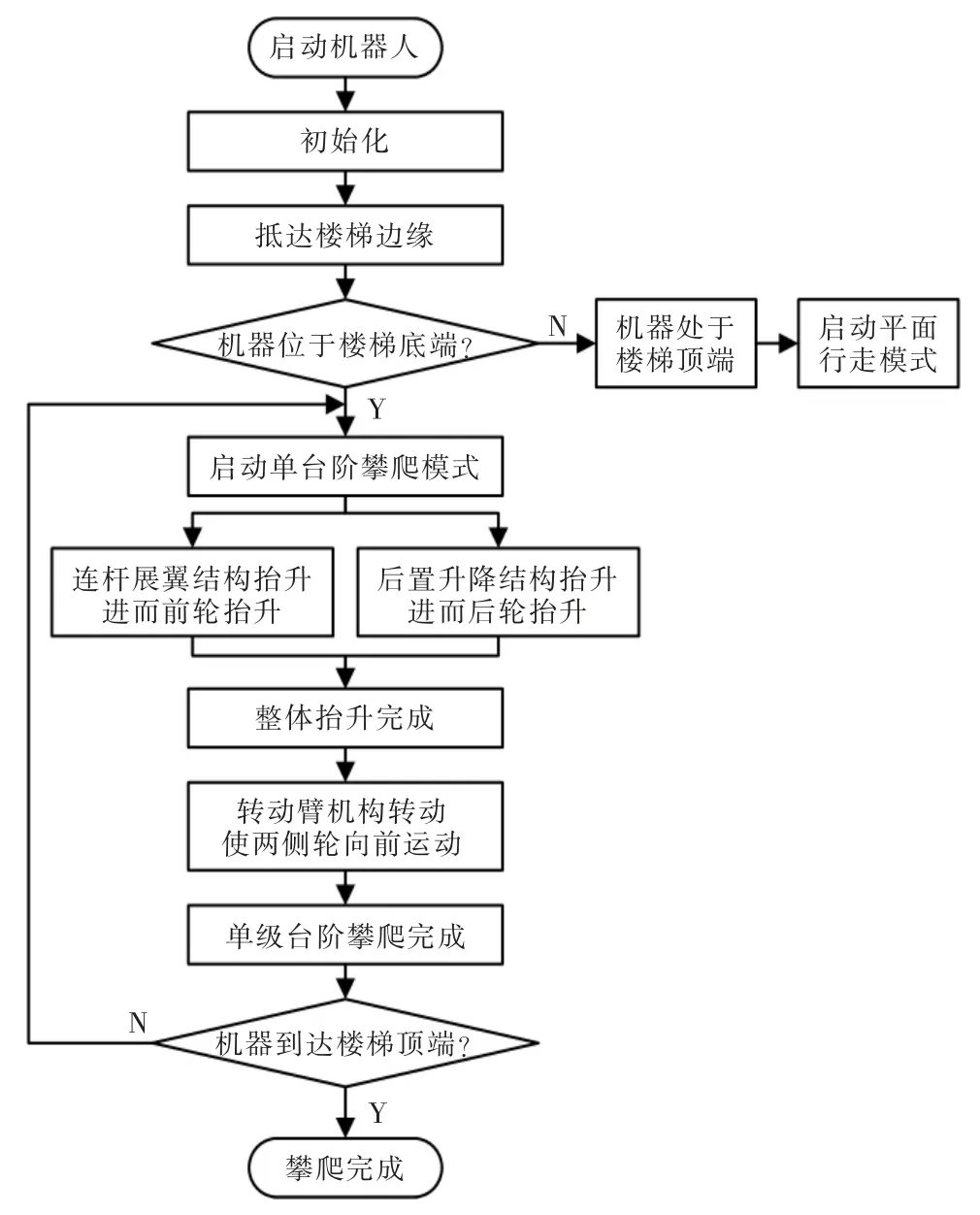
圖8 仿生輪腿式爬梯底盤控制邏輯Fig.8 Bionic wheel leg ladder chassis control logic diagram
4.2 上樓梯流程仿真
底盤上、下樓梯狀態仿真如圖9 所示,圖9(a)~(d)表示上樓狀態,圖9(e)~(g)表示下樓狀態。
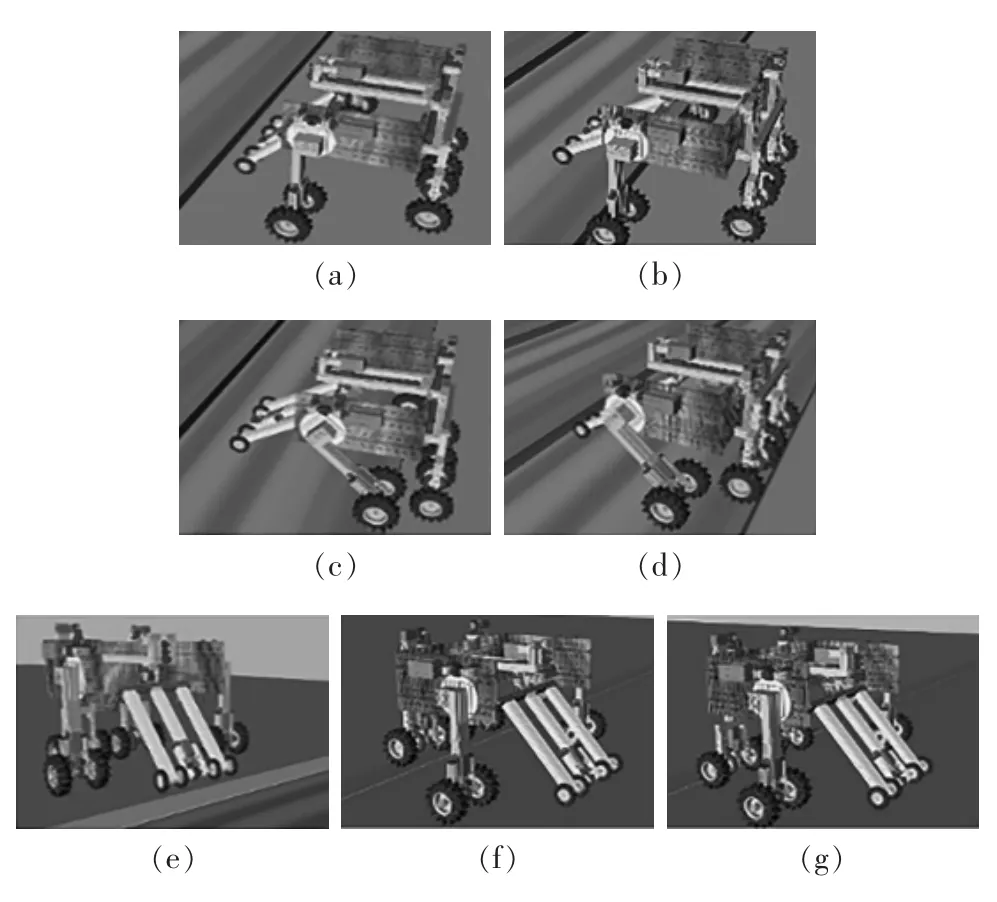
圖9 底盤上樓梯狀態仿真Fig.9 Simulation diagram of the state of stairs on the chassis
步驟1 機器抵達樓梯邊緣時,通過讀取位置傳感器反饋當前機器所處位置。當判斷位于樓梯底端時,如圖9(a)所示,機器人啟動單臺階爬梯模式。連桿展翼機構抬升,使前輪(前排行走輪)接觸第1個樓梯臺階面上,如圖9(b)所示,然后機器整體向前移動一段距離;
步驟2 轉動臂機構即將到達第1 個樓梯臺階面前沿時,轉動臂機構向后方轉動,機器整體向前移動一段距離,此時機器前輪和中輪(轉動臂行走輪)都接觸臺階面,如圖9(c)所示;
步驟3 升降機構向上運動,機器整體前移,使后輪(后排行走輪)接觸第1 個樓梯臺階面,轉動臂機構復位,后置升降機構向下運動使后輪接觸臺階面,如圖9(d)所示。
4.3 下樓梯流程仿真
步驟1 機器人位于樓梯頂端連桿展翼機構下降,使前輪接觸第1 個樓梯臺階面。如圖9(e)所示,機器整體向前移動;
步驟2 當轉動臂機構剛越過樓梯沿時,后置升降機構向上運動,使中輪接觸第1 個臺階面,如圖9(f)所示,整體機構再次向前移動;
步驟3 當后置升降機構越過樓梯沿時,后置升降機構向下運動,使后輪接觸第1 個臺階面,即完成了一階臺階下降,如圖9(g)所示。
5 試驗與分析
爬樓梯輪椅樣機[8]如圖10 所示,基于實驗的易操作性,文章搭建出放縮版物理樣機,該樣機質量為9.2 kg,外形尺寸為600 mm×500 mm×480 mm。
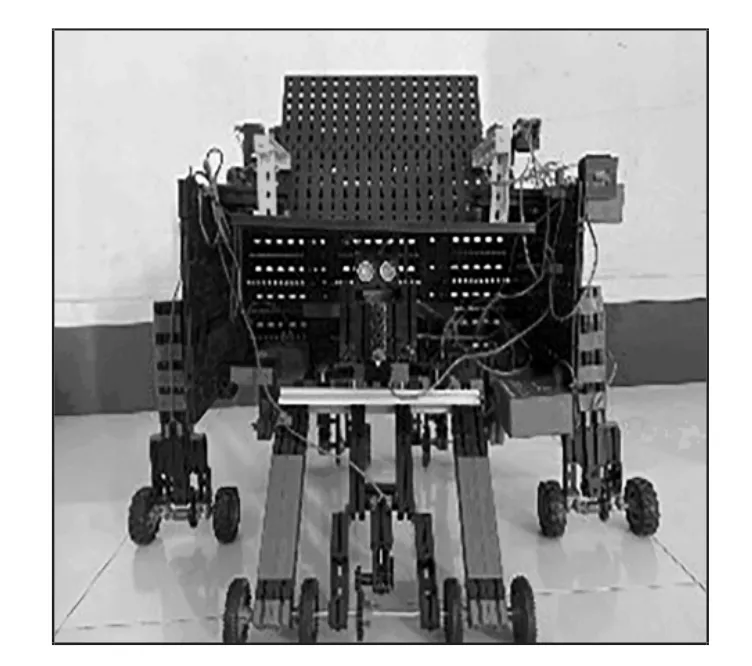
圖10 爬樓梯輪椅物理樣機Fig.10 Physical prototype of a staircase wheelchair
本研究選取高度較低,臺階面較大的樓梯進行了樣機空載上、下臺階試驗測試,記錄試驗數據并剔除粗大誤差等,最終得到數據如表1 所示。試驗結果表明,攀爬一級臺階平均總時長為11.8 s,下降一級臺階平均總時長為12.47 s。該物理樣機距離實際工程樣機有一定差距,但其在某方面驗證仿生輪腿式爬梯底盤結構的穩定性和高效性。
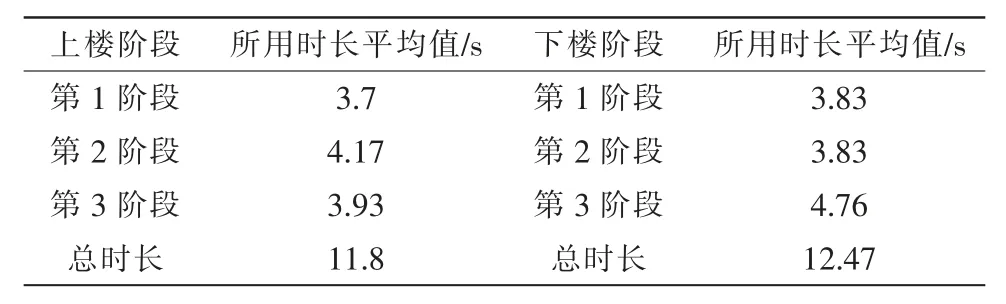
表1 試驗測試Tab.1 Trial test
6 結語
本研究利用SolidWorks 軟件完成了一款可實現自調節底盤保持恒水平穩定的仿生輪腿式爬梯底盤結構建模設計。并借助Altair Inspire 有限元仿真軟件對二連桿裝置、升降軸裝置、中轉臂裝置仿真分析,得出各裝置最大應力值及分布情況。最后基于ADAMS 軟件對連桿展翼機構并結合FTdesigner 技術、進行輪攀越臺階和底盤結構負載運動質心運動學仿真分析,驗證其運動的穩定性、可行性。并研發了以助老為應用點的爬樓梯輪椅物理樣機,開展其多次攀爬及下降一級臺階的試驗。
