
基于UWB 技術的無軌膠輪車行車安全距離檢測預警
2023-08-04 03:39:08韓燕南
煤礦安全 2023年7期
關鍵詞:方向
韓燕南
(1.中煤科工集團常州研究院有限公司,江蘇 常州 213015;2.天地(常州)自動化股份有限公司,江蘇 常州 213015)
目前在我國西北地區千萬噸高產高效礦井尤其是斜井開拓的礦井已普遍采用無軌膠輪車的“點到點”運輸工藝[1-4]。此運輸工藝具有易維護、機動靈活、安全穩定等特點,在煤礦安全生產過程中具有舉足輕重的作用。但井下巷道結構復雜[5]、敷設管道眾多、光線昏暗,是個環境惡劣的狹小作業空間[6-7]。無軌膠輪車受自身結構所限,存在視野盲區,易給來往車輛或同向車車輛發生碰撞事故。為此,在《煤礦安全規程》三百九十二條第六款規定中在煤礦采用無軌膠輪車運輸時,應當遵守同向行駛車輛必須保持不小于50 m 安全運行距離的硬性規定。
許多學者對無軌膠輪車(以下簡稱車輛)運輸安全的實現方式進行了研究。王曉云[8]提出采用在井下運輸巷道安裝智能紅綠燈報警裝置,提示司機注意來往行駛的車輛及行人,但該裝置功能較為單一,缺少安全距離預警判斷機制;豐繼偉[9]提出對無軌膠輪車采取智能化控制設計,通過安裝行車區間閉鎖裝置、交叉路口信號燈、測速儀和紅外線阻車器等裝置,該系統著重解決了交叉路口的交通控制功能,但無法滿足煤礦安全規程中關于同向安全運行距離的規定;郭海軍等[10]提出采用射頻識別技術實現井下車輛定位跟蹤、通過定位位置信息控制區間路段交通燈,該系統解決了區間內的車輛安全問題,但缺乏跨區間的車輛安全預警邏輯。
針對上述問題,設計了基于UWB 技術的無軌膠輪車行車安全距離檢測預警方法,為智能輔助運輸一體化系統中車輛安全距離預警播報功能提供判定邏輯,以滿足《煤礦安全規程》中關于行車安全距離的相關規定。該方法首先利用巷道中線點之間的鄰接關系構建出巷道拓撲網絡;其次,利用車輛相鄰時刻的精確定位數據確定車輛行進方向;再次,采用空間和路網2 級檢索方式,檢索出安全距離范圍內的可疑對象;最后,對可疑車輛的行進方向與實際路徑方向做匹配,確定預警對象。
1 設計方案
1.1 物理結構
物理結構如圖1。
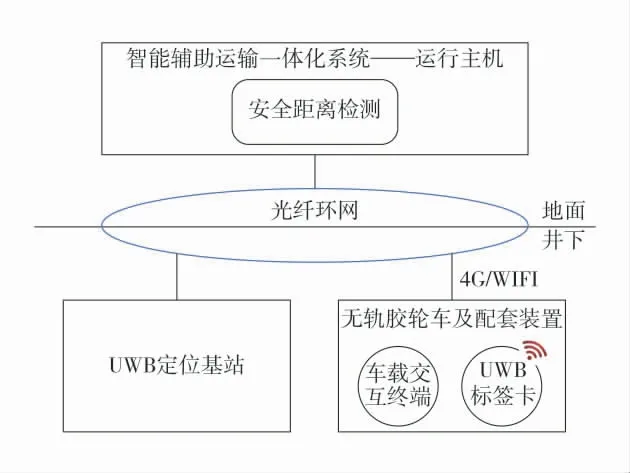
圖1 物理結構Fig.1 Physical structure
方案的物理結構是由地面和井下2 部分組成。井下部分均采用智能輔助運輸一體化系統(以下簡稱輔運系統)中基礎的硬件和裝置,主要有UWB 定位基站、無軌膠輪車配套的車載交互終端和UWB標簽卡,以及井下環網構成;地面部分是將含有安全距離檢測功能的輔運系統部署至運行主機中。
UWB 定位基站輪詢掃描車輛UWB 標簽卡信號,獲取車輛實時位置數據,并通過井下環網傳輸至地面服務器中。車載交互終端通過4G/WIFI 與井下環網連接,實現安全預警播報和完成人機交互操作。安全距離檢測功能實時計算出井下每輛車當前安全距離范圍內的移動目標,通過環網通知車載交互終端實現語音播報。
1.2 安全距離檢測邏輯
處理邏輯分為初始化和運行2 個階段:在初始化階段中實現巷道拓撲網絡構建;在運行階段中實現車輛行進方向計算、安全距離檢索和方向匹配3項功能。處理流程如圖2。
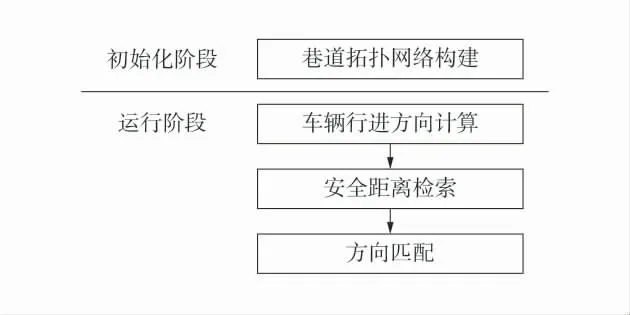
圖2 處理流程Fig.2 Process flow
1)巷道拓撲網絡構建。巷道信息是由具有三維地理空間坐標的中線點組成,需要對離散的中線點數據進行拓撲關聯計算,形成具有連續特征的巷道拓撲網絡結構,得到巷道路網結構。
2)車輛行進方向計算。依據車輛相鄰時刻的運動變化量與巷道拓撲走向之間的空間方位變換確定車輛行進方向,再根據變換結果的正負性得出車輛行進方向所在巷道中線點。
3)安全距離檢索。依據車輛所處巷道的安全距離配置參數,采用空間及路網兩級檢索方式,確定當前車輛前進方向安全距離范圍的可疑移動目標對象。此處的路網數據是依據步驟1)中所得的巷道拓撲網絡。路網檢索采用的是弗洛伊德(Floyd)最短路徑核心思想。
4)方向匹配。首先,計算可疑車輛的行進方向。其次,利用當前車輛行至可疑車輛處的最短路徑與可疑車輛的行進方向做匹配。最終,得出該可疑車輛是否為需預警對象的結果。
2 功能實現
2.1 巷道拓撲網絡構建
巷道拓撲網絡數據結構圖3。

圖3 巷道拓撲網絡數據結構Fig.3 Data structure of roadway topology network
該拓撲網絡數據結構是由巷道拓撲網絡和中線點數據結構2 部分組成。其中,巷道網絡由多條巷道中線構成,每條巷道中線由2 個中線點a 和b(a和b 代表中線點索引Index)構成;中線點數據結構包括了坐標、中線點索引Index 和鄰接點關聯數組,鄰接點關聯數組中存儲的是所有與當前中線點存在拓撲關系的中線點索引。
巷道網絡拓撲構建流程如圖4。
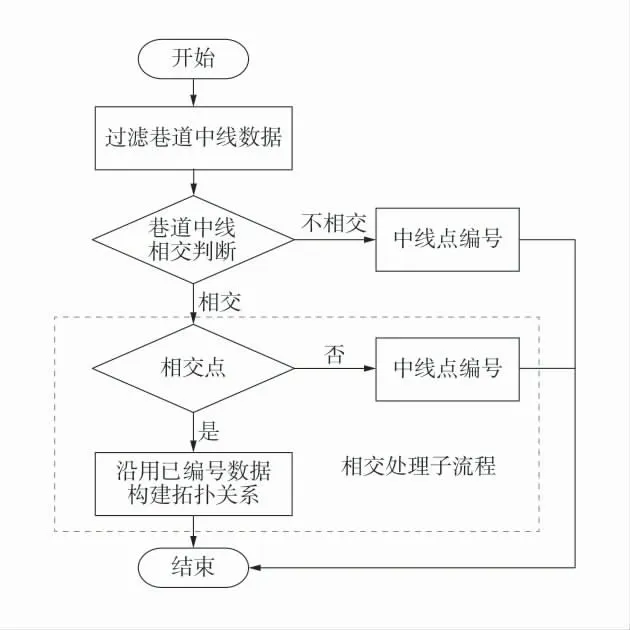
圖4 巷道網絡拓撲構建流程Fig.4 Construction process of roadway network topology
1)第1 步。對巷道中線點數據進行過濾,去除非法數據。
2)第2 步。計算巷道中線相交關系,若相交進行第3 步處理,反之對中線點a 和b 進行唯一編號。
3)第3 步。對中線點a 和b 判斷是否為相交點。若是相交點,沿用已編號序號,并與已編號數據生成拓撲關系。反之對中線點a 和b 進行唯一編號。
按照上述步驟,完成對中線點數據的處理,最終構建出完整的巷道拓撲網絡。
2.2 車輛行進方向計算
通過向量內積結果的正負判斷車輛行進方向是中線點a 或b。計算原理如圖5。圖中:Ti-1為當前車輛的前一時刻位置;Ti為當前車輛的位置,Ti在巷道AB 上。
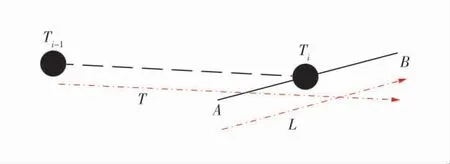
圖5 計算原理Fig.5 Principle of calculation
思路為:①構建車輛運動變化量T:T= Ti-Ti-1;②構建巷道走向L:L=B-A;③確定車輛的前進方向是A 還是B,若T※L>0,為B,反之,為A。
計算公式為:
式中:direction 為車輛行進方向的中線點,Ti-1Ti為車輛行進變化量,AB 為車輛當前所在巷道方位向量,由組成該巷道的2 個中線點決定。
在此方法中,僅用到了乘法和比較運算,未用到除法運算或三角函數運算,避免了高昂的計算代價和容易產生舍入誤差等問題。
2.3 安全距離檢索
依據車輛所處巷道的安全距離參數,實現空間和路網2 級檢索方式,確定當前車輛前進方向安全距離內的移動目標。
2.3.1 空間檢索
空間檢索示意圖如圖6。圖中:Ti為當前車輛位置;T1~T5為巷道中其他車輛。以當前車輛位置為圓點,安全距離為半徑,構建1 個圓形空間區間,將落在此空間內的移動目標列為可疑對象。
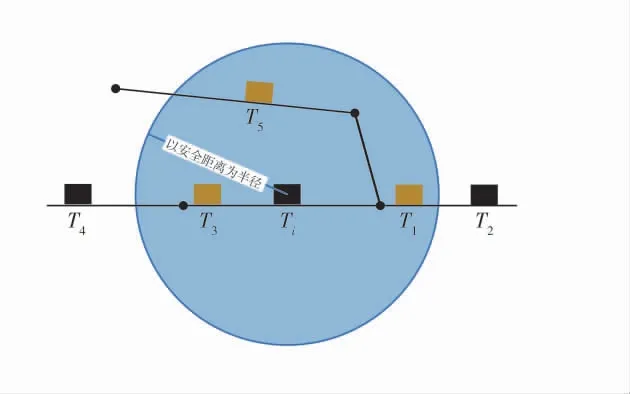
圖6 空間檢索示意圖Fig.6 Schematic diagram of spatial retrieval
由圖6 可知:T1、T3、T5屬于此空間區間內。空間檢索采用GIS 領域標準的點緩沖區分析方法實現。
2.3.2 路網檢索
對空間檢索出的可疑對象進行路網方式復檢,以確定真正意義上的安全距離內可疑對象。根據路網數據結構以及井下實際情況,當前車輛與可疑車輛的位置關系可分為處于同一巷道內和不處于2 種情況。2 種情況的處理方式存在一定差異。
當前車輛與可疑車輛處于同一巷道內路網檢索如圖7。圖中:Ti為當前車輛的位置;Ts1、Ts2為可疑車輛位置;a、b 為中線點;b 為Ti行進方向中線點;LTib為Ti與b 之間的距離;Ls1b為Ts1與b 之間的距離;Ls2b為Ts2與b 之間的距離。
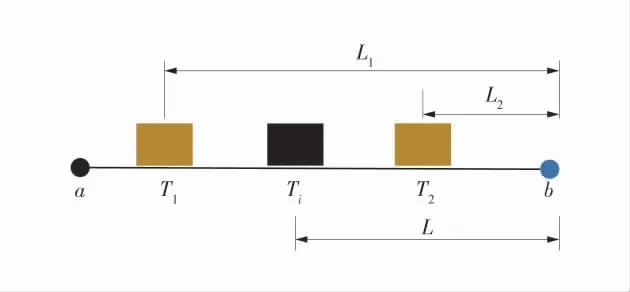
圖7 當前車輛與可疑車輛處于同一巷道路網檢索情況Fig.7 Road network retrieval state of current vehicle and suspicious vehicle in the same lane
根據當前車輛和可疑車輛到行進方向中線點的距離,可推導出2 車的前或后的位置關系公式為:
式中:pos_relationab為對象a 與對象b 的位置關系;La為對象a 到中線點距離;Lb為對象b 到中線點距離。
由此可得,在圖7 中Ts1位于Ti的后面,Ts2位于Ti的前面。依據安全距離須為行進方向的前提條件,Ts2列為可疑對象。
上述中2 個對象間的距離計算公式為:
式中:L 為距離值;(x1,y1,z1)為1#坐標;(x2,y2,z2)為2#坐標。
當前車輛與可疑車輛不處于同一巷道內路網檢索情況如圖8。圖中:Ti為當前車輛的位置;Ts1可疑車輛位置;a、b、c 為中線點;b 為Ti前進方向中線點;a 到c、a 到d 之間存在0~n 條路徑;b 到c、b 到d 之間存在0~n 條路徑
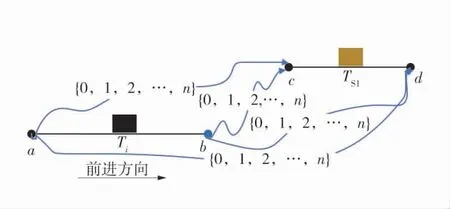
圖8 當前車輛與可疑車輛不處于同一巷道內路網檢索情況Fig.8 Road network retrieval state of current vehicle and suspicious vehicle in the various roadways
根據上述觀察可得:Ti行至Ts1存在4 條路徑,分別為:
依據安全距離須為行進方向的前提條件,Ti行至Ts1必須經過中線點b,故由此可得潛在路徑為路徑①和路徑②,通過計算潛在路徑的距離,選擇最短的1 條作為實際路徑。最后,判斷實際路徑距離值是否滿足安全距離要求,最終確定屬于安全距離范圍內的可疑對象。
潛在路徑①和潛在路徑②的距離值的計算方法一致,現以路徑①為例進行闡述。距離值的計算公式為:
式中:L(Ti,b)為Ti至b 距離;L(b,c)為b 至c距離;L(c,Ts1)為c 至Ts1距離。
L(Ti,b)和L(c,Ts1)為2 點直線距離,采用式(3)進行計算,L(b,c)為任意2 點距離,采用弗洛伊德(Floyd)最短路徑算法思想。
2.4 方向匹配
采用車輛行進方向計算,得出可疑車輛行進方向中線點。其次,判斷當前車輛行進方向與可疑車輛行進方向進行匹配。最終,得出是否預警的結果。在方向做匹配時,基于此前分析可得,當前車輛與可疑車輛的位置關系可分為處于同一巷道內和不處于2 種情況,在本階段需要分情況處理。
1)前車輛與可疑車輛處當于同一巷道內方向匹配。當前車輛與可疑車輛處于同一巷道方向匹配情況如圖9。圖中:Ti為當前車輛的位置;Ts2為可疑車輛位置;a、b 為中線點;b 為Ti前進方向中線點。基于圖9 觀察可得:當可疑車輛Ts2的行進方向中線點為a 時,與Ti處于敵對方向;當行進方向中線點為b時,與Ti處于同向。由此可推導出:可疑車輛行進方向中線點與當前車輛一致時,屬于同向,反之屬于敵對的結論。
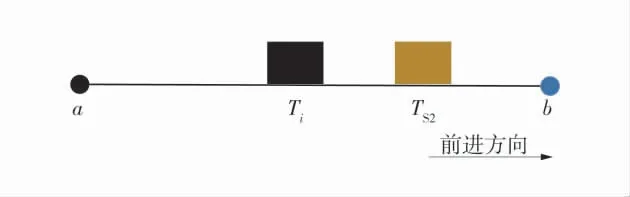
圖9 當前車輛與可疑車輛處于同一巷道內方向匹配情況Fig.9 Direction matching state of current vehicle and suspicious vehicle in the same lane
2)前車輛與可疑車輛不處于同一巷道內方向匹配。當前車輛與可疑車輛不處于同一巷道內方向匹配情況如圖10。圖中:Ti為當前車輛的位置;Ts1為可疑車輛位置;a、b、c、d 為中線點;b 為Ti行進方向中線點;Ti至Ts1路徑為Ti→b→c→Ts1。基于圖10 觀察可得:可疑車輛Ts1的行進方向中線點為c 時,屬于敵對方向,行進方向中線點為d 時,屬于同向。由此可推導出:可疑車輛行進方向中線點屬于最短路徑點時屬于敵對方向,反之屬于同向。

圖10 當前車輛與可疑車輛不處于同一巷道內方向匹配情況Fig.10 Direction matching state of current vehicle and suspicious vehicle in the various roadways
3 試驗驗證
3.1 模擬巷道試驗
模擬巷道內部共4 條巷道,組成2 個3 岔路口和1 個U 形彎路口,內部安裝有4 個UWB 精確定位基站。從西門開始,選取200 m 道路作為試驗路段。模擬巷道試驗環境如圖11。
采用3 張車輛UWB 標簽卡模擬車輛在巷道內不同位置進行移動,根據車輛間的位置關系和應用程序輸出日志檢驗所提方法邏輯的準確性和實時性。方法邏輯的準確性是通過方法中的車輛行進方向計算和安全距離檢索+方向匹配2 大項單獨驗證構成。實時性是累加前述2 項驗證的平均耗時。
1)車輛行進方向計算。車輛從西門進入,在到達第1 個路口后,朝西巷道行進,隨后轉入南巷道,最終行至東巷道與北巷道的路口。車輛移動過程中采用勻速行進和變速行進2 種方式。經目測與程序日志輸出結果對比,車輛預期行進方向理論值與程序日志輸出結果保持一致。試驗結果表明:該邏輯判斷方法正確,經耗時時間統計,平均耗時為15 ms。
2)安全距離檢索+方向匹配。將巷道的安全距離設置為:①ab 巷道20 m;②bc 巷道100 m(用于模擬2 車處于同一巷道內和不處于同一巷道內的情況);③cd 巷道100 m;④de 巷道50 m(用于模擬安全距離無法覆蓋的情況)。3 張車輛UWB 標簽卡標注為車A、車B、車C,以車B 為當前車輛,車A 在前,車B 在中間,車C 在最后的順序依次從西門進入巷道內。試驗結果如下:①車A 行至bc 巷道內,車B 進入ab 巷道:程序安全距離檢索模塊輸出無可疑對象;②車A 停留在bc 巷道,車B 進入bc 巷道:此時車B 和車A 屬于同一巷道情況,程序安全距離檢索模塊輸出可疑對象為車A,方向匹配模塊輸出車A 為需預警對象;③車A 進入cd 巷道,車B停留在bc 巷道:此時車B 和車A 屬于不處于同一巷道內情況,程序安全距離檢索模塊輸出可疑對象為車A,方向匹配模塊輸出車A 為需預警對象;④車B 停留在bc 巷道內,車C 從西門ab 巷道進入,直至行至bc 巷道內:此時車C 位于車B 后面,受安全距離檢索僅搜索車輛行進方向的規則,程序安全距離檢索模塊未輸出可疑對象車C;⑤車B 停留在bc 巷道內,車A 在cd 巷道內往c 點行進:程序安全距離檢索模塊輸出可疑對象為車A,方向匹配計算車A 與車B 行進方向為敵對方向,不屬于預警對象;⑥車A 進入de 巷道,行至e 點處,車B 行進至d點處:受安全距離所限,程序安全距離檢索模塊輸出無可疑對象。經上述6 種方法實驗,試驗結果表明:預期理論值與程序邏輯一致,該邏輯判斷方法正確;經耗時時間統計,平均耗時為125 ms。
通過對所提方法的單項進行驗證,所提方法的相關邏輯均為正確;邏輯判斷平均耗時約為140 ms,滿足現場實際應用要求。
3.2 現場驗證
新疆伊犁能源伊犁四礦使用無軌膠輪車執行井下運輸任務,在錄車輛約為47 輛,選擇車流量較大的23-2 煤層輔助運輸大巷作為試驗路段,該路段連接著緩坡斜井和工作面,是運輸車輛日常出入井的必經之路。試驗路段全長約為2 km,部署有6 個UWB 定位基站,全程UWB 信號覆蓋,布置圖如圖12。圖中紅色標注部分為本次試驗路段,綠部分為UWB 定位基站位置。
通過GIS 二維圖中測距工具,獲得2 個車之間的距離關系;通過目測,獲得2 車間的行進方向屬于同向或敵對。觀察一段時間的運行狀態,結果顯示:所提方法邏輯正確,平均耗時約為140 ms。
4 結 語
1)車輛行進安全距離檢測,在初始化階段完成巷道拓撲網絡構建。在運行階段,首先,借助UWB精確定位基站獲知車輛實時位置,依據車輛相鄰時刻位置關系,明確車輛行進方向;其次,在空間和路網雙重安全距離檢索下獲得可疑車輛;再次,依據當前車輛和可疑車輛行進方向匹配結果,確定需要預警的對象;最后,通過車載交互終端發出語音預警信息。
2)檢測方法在模擬巷道的試驗結果表明:邏輯代碼運行正常,邏輯響應時間約為140 ms。具有功能穩定、實時性高的特點。
3)在新疆伊犁四礦現場的試驗結果表明:現場應用狀況良好,車輛行進安全風險管控效果顯著。具有以下3 項特點:①安全距離靈活可配、管控精細化:可依據巷道的特征和風險情況,為不同巷道配置個性化的安全距離,使得安全管控精細化;②低成本:整套技術方案無需額外加裝硬件裝置,完全借助軟件實現,為項目實施節省成本;③實用性:檢測方法性能穩定、運行實時性高,可滿足《煤礦安全規程》的要求。
猜你喜歡
計算機應用(2023年1期)2023-02-03 03:09:28
音樂天地(音樂創作版)(2022年10期)2023-01-13 05:47:42
湘潮(上半月)(2022年5期)2022-12-06 03:02:28
計算機應用(2022年2期)2022-03-01 12:33:42
計算機應用(2022年1期)2022-02-26 06:57:42
計算機應用(2021年4期)2021-04-20 14:06:36
數學小靈通(1-2年級)(2021年3期)2021-04-13 01:01:58
計算機應用(2021年3期)2021-03-18 13:44:48
計算機應用(2021年1期)2021-01-21 03:22:38
數學小靈通·3-4年級(2017年11期)2017-11-29 01:35:50
