機動條件下艦炮對目標的命中概率影響分析?
2023-08-04 05:45:20馮昌林
艦船電子工程 2023年4期
關鍵詞:艦艇
馮昌林 陳 鋒
(中國人民解放軍92942部隊 北京 100161)
1 引言
常規火控解算過程中,通常將艦艇機動過程簡化為勻速直線運動以簡化計算,而實際作戰過程中,艦艇遭遇敵方目標并對其進行打擊時,會保持機動以減小自身被打擊風險[1]。實際上,艦艇機動并非單純的勻速直線運動,因此,當艦艇進行機動間射擊時,傳統火控解算方法會存在較大誤差,從而直接影響艦炮對目標的射擊精度[2~3]。為貼近實戰以提升艦炮射擊效力,需進行機動條件下艦炮武器火控解算分析,以在保證己方艦艇生存率的同時精確打擊敵方目標[4]。艦炮武器系統工作流程為探測系統發現并鎖定目標,獲取目標當前相對于艦艇的距離、方位角等參數,火控系統根據目標運動參數計算出射擊諸元,隨動系統根據火控系統給出的射擊諸元進行瞄準并發射[5~6]。艦炮在艦艇機動間射擊時,從火控系統解算出射擊諸元到艦炮發射這個過程有短暫時間間隔,也就是說,艦艇機動條件下,艦炮發射時的真實初始位置和方位角信息與火控系統解算輸入的初始位置和方位角信息存在一定偏差。此時,從艦艇角度看將存在兩個問題:其一是目標在進行機動,針對此問題,可采用交互式多模型算法(IMM)[7~8]對目標進行跟蹤處理以獲取目標運動參數;其二是目標的觀測量誤差突然增大,這是因為傳統火控系統仍將艦艇視為靜止或直線運動,艦艇機動產生的誤差需進行補償,以減小武器系統對目標的觀測誤差。
2 艦艇機動產生的觀測誤差分析
目前對機動目標打擊問題的研究重點為采用何種運動模型對機動目標進行軌跡預測,但對觀測誤差的修正與補償問題欠缺考慮[9。以初始時刻艦炮炮口為原點建立標準坐標系,則對海面上的機動目標t進行觀測產生的距離誤差方差為σρ2,對應的距離誤差為vρ(k);方位角誤差方差為σθ2,對應的方位角誤差為vθ(k)。假設k時刻艦艇處于機動狀態,則艦炮在k時刻的真實位置信息為:、;探測系統傳輸給火控系統的自身位置信息為X1(k)、θ1(k);目標的觀測數據為
其中,X表示位置參數,θ表示方位角參數。
艦艇機動條件下艦炮對目標進行射擊時,從火控解出射擊諸元到艦炮發射過程延時較短,在較短延時下,艦艇位置變化較小,因而對射擊精度的影響很小,但產生的角度誤差則會對射擊精度產生較大[10]。令測距誤差仍為vρ(k),而角度誤差則表示為
角度誤差方差為
其中:
假設由艦炮武器系統自身性能決定的量測噪聲協方差為R0=diag([σρ2,σθ2]),則考慮艦艇機動產生的觀測誤差后,艦炮武器系統的虛擬觀測噪聲協方差為
3 基于誤差修正的跟蹤算法
交互式多模型算法無需檢測目標的機動過程,跟蹤濾波采用馬爾科夫鏈實現轉換[11~13],使得模型在機動與非機動模型之間相互切換,具有全面自適應能力,其原理如圖1所示。
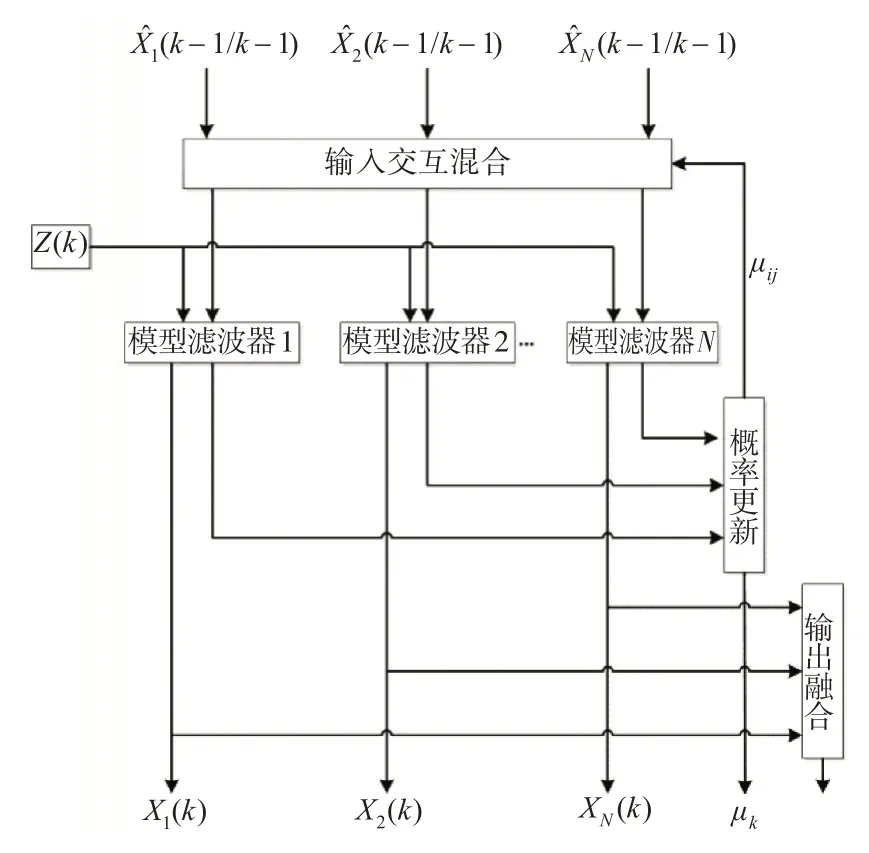
圖1 IMM算法原理圖
圖1 中,N 個模型及其濾波器共同組成IMM 的模型集。設機動目標模型集中的模型數為r,記為m1m1…mr,建立濾波模型,系統狀態方程為
觀測方程為
其中,F(k)為狀態轉移矩陣;X(k)為k時刻的目標狀態矢量,H(k)為觀測矩陣,ω(k)為過程噪聲,v(k)測量噪聲,對應的協方差矩陣為,二者皆為零均值白噪聲[14]。
在一個采樣周期[Mk,Mk-1] 內,多模型算法的混合協方差可表示為
對輸出信息進行融合,則總體協方差可表示為
以艦炮所在位置為坐標原點建立坐標系,假設艦艇前25s 進行角速度為10°/s 的轉彎機動,其后35s 進行速度為30 節的勻速直線運動,最后25s 進行角速度為-10°/s 的轉彎機動;目標初始位置為(3000m,4000m),目標前35s 進行角速度為7°/s 的轉彎機動,其后35s 進行角速度為-10°/s 的轉彎機動,最后15s進行速度為30節的勻速直線運動。
設置參數為采樣時間間隔為1s,馬爾科夫轉移概率矩陣為P=[0.7,0.3;0.3,0.7] 距離測量誤差為15m,方位角誤差為2.5rad,當艦艇機動時距離測量誤差不變,測角誤差增大,艦艇與目標真實運動軌跡如圖2所示,目標真實軌跡與測量值如圖3所示。

圖2 艦艇與目標真實運動軌跡
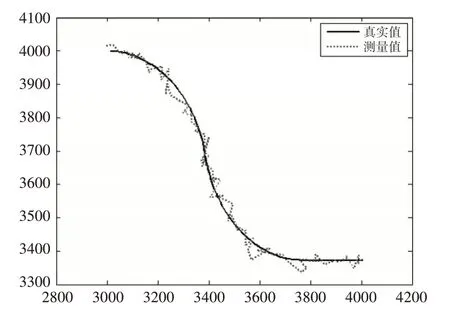
圖3 目標真實軌跡與測量值
采用修正后的測量噪聲協方差矩陣進行跟蹤濾波效果如圖4、5所示。
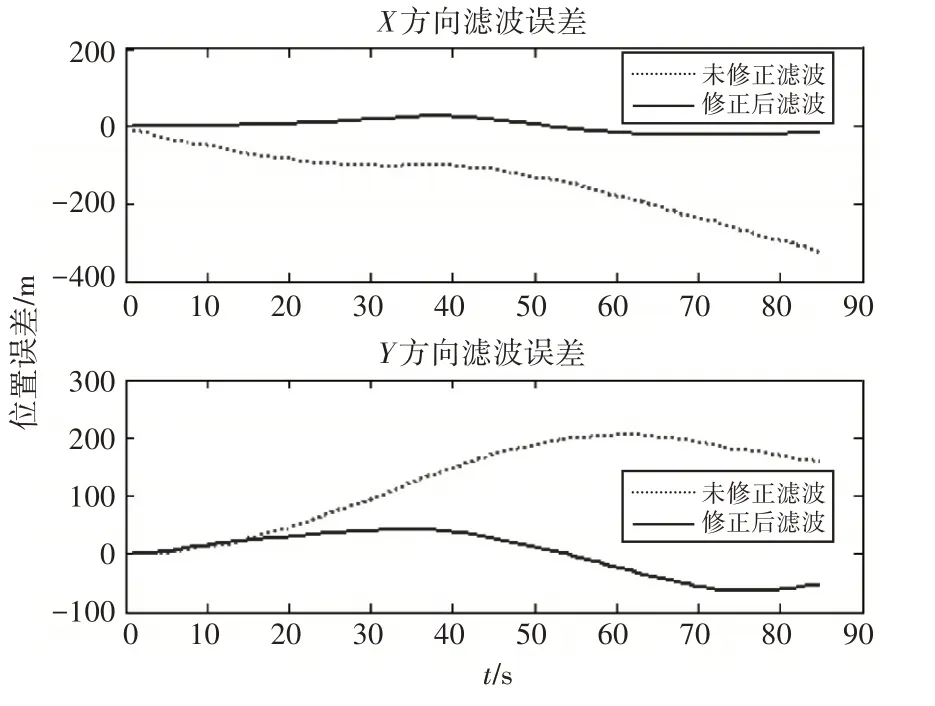
圖4 修正前后濾波誤差對比
艦艇機動過程中,目標觀測位置誤差及角度誤差均方根平均值如表1所示。
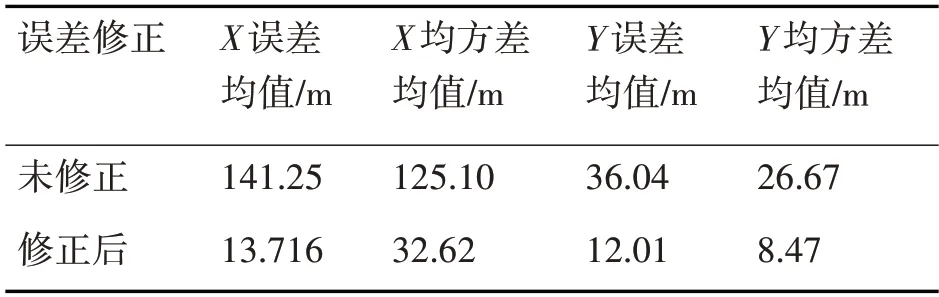
表1 位置誤差及角度誤差均方根均值
由上述仿真結果可知,采用改進后的觀測噪聲協方差矩陣后,目標跟蹤濾波誤差顯著減小。由圖4 和圖5 可看出,當目標及艦艇機動方式發生變化時,濾波誤差會顯著增大,這種誤差直接體現在對目標的觀測角度誤差,對艦炮射擊效力影響較大。由表1 可知,修正后目標觀測位置誤差和角度誤差均方差均值相較于修正前要小得多,可以看出,本修正方法可有效減少艦艇機動時對目標的觀測誤差,從而有效提升艦炮對目標的射擊效力。

圖5 修正前后濾波誤差標準差對比
4 目標觀測算法修正后艦炮對目標命中概率分析
為研究目標測角誤差修正后艦炮對目標射擊效力的影響,先對修正前后艦炮對機動目標命中概率進行仿真分析,仿真條件為:艦艇運動速度為10節,采用130mm 艦炮對目標進行打擊,彈丸初速為860m/s,目標運動速度為30 節,運動方式為轉彎運動及勻速直線運動,艦艇投影面積為120m*15m*8m,假設每一次艦艇及目標發生機動時對艦炮對目標進行射擊,則目標參數如表2所示。

表2 艦炮對機動目標單發命中概率
其中,轉彎運動1 為艦艇順時針圓周運動,速度為10°/s;轉彎運動2 為目標順時針圓周運動,速度為7°/s;轉彎運動3為目標逆時針圓周運動,速度為7°/s;轉彎運動4為艦艇逆時針圓周運動,速度為10°/s;直線運動1 為目標勻速直線運動,速度為30節;直線運動2為艦艇勻速直線運動,速度為30節。
由表2 可知,修正后艦艇及目標的相對方位角角修正前平均相差1.926%,修正后艦炮對目標的單發命中概率相較于修正前平均提高19.8%,由此可見,采用測量誤差修正方案可有效提升機動條件下艦炮對目標的命中概率。
5 結語
由上述仿真分析可知:
1)誤差修正基于誤差產生原因,結合武器系統工作原理分析可知,當艦炮在艦艇機動間進行射擊時,由于從火控系統解算出射擊諸元到艦炮發射這個過程有短暫延時,艦艇機動條件下艦炮發射時的真實位置和方位角信息與火控系統解算時輸入的位置和方位角信息存在一定偏差,由于延時短暫,艦艇位置變化并不明顯,對艦炮射擊效力影響不大,而因轉向產生的角度誤差則會對射擊精度產生較大,因此產生的目標觀測角度誤差需進行修正。
2)由修正前后目標跟蹤產生的誤差及其協方差仿真分析可知,采用修正方案對目標觀測角誤差進行修正后,跟蹤誤差及其協方差有了很顯著的下降,且艦炮對目標的命中概率也有了較大提升,這證明對目標的觀測角度誤差修正對于提升武器系統射擊效力具有重要意義。
猜你喜歡
小學生學習指導(小軍迷聯盟)(2023年5期)2023-05-29 08:13:18
環球時報(2022-12-30)2022-12-30 15:15:00
軍事文摘(2022年13期)2022-08-27 01:26:26
鳳凰動漫(軍事大王)(2022年3期)2022-06-17 01:46:36
艦船科學技術(2022年5期)2022-04-19 10:58:46
軍事文摘(2021年21期)2021-11-14 10:14:56
軍事文摘(2017年24期)2018-01-19 03:36:16
兵器知識(2017年10期)2017-10-19 19:31:38
軍事體育學報(2014年3期)2014-02-27 16:00:16
船海工程(2013年6期)2013-03-11 18:57:37
