倒立擺控制系統優化與實時仿真
2023-08-06 16:47:39劉佳偉宋楠董文琦曹玉波
化工自動化及儀表 2023年4期
劉佳偉 宋楠 董文琦 曹玉波

摘 要 以一階直線倒立擺為研究對象,基于牛頓第二運動定律,在慣性坐標系內分析和建立倒立擺狀態空間表達式數學模型,設計并實現了基于經典PID控制器、狀態反饋控制器和全維狀態觀測器的狀態反饋控制器的倒立擺控制系統。通過MATLAB腳本語言實現了倒立擺實時仿真與控制系統,結果表明:優化后的全維狀態觀測器的狀態反饋控制器運行效果更優,仿真結果與實際設備運行狀態基本吻合。
關鍵詞 一階倒立擺 全維狀態觀測器 狀態反饋控制器 PID控制器 腳本編程 實時仿真
中圖分類號 TP273? ?文獻標識碼 A? ?文章編號 1000-3932(2023)04-0453-06
倒立擺系統作為一類經典的非最小相位系統具有機械構造簡單、占用空間小及使用范圍廣等優點,非常適合在經費與科研條件都有限的實驗室中進行控制實驗[1]。其本身所具有的非線性、強耦合性及不穩定性[2]等工程中十分普遍的特性,使其具備著一般非線性不穩定系統中非常重要的動態性能[3]。在控制領域,許多經典和現代的控制方法以及復雜系統的物理模型都可以近似到倒立擺系統中[4],各種經典控制理論和新穎的控制策略也可通過倒立擺進行驗證[5],并且控制效果可以通過擺桿和小車的狀態直觀地體現出來,其相關控制算法已應用于軍工、航天及機器人等諸多領域[6,7]。因此,對倒立擺系統的實現與優化不僅能將理論具體應用到實際設備,同時也為探索、論證新理論的正確與否提供實驗平臺和實踐基礎。
1 倒立擺機理模型
直線倒立擺是經典的倒立擺模型,針對直線倒立擺的實驗能夠直觀體現許多控制性能,如系統的能控能觀性、穩定性及抗干擾性等[8]。本次設計根據經典控制理論利用牛頓第二運動定律對倒立擺系統進行力學分析,在忽略空氣阻力和摩擦力后,可以將其抽象為由小車和勻質擺桿組成的剛性系統,如圖1所示。
直線一階倒立擺簡化模型中的參數,均取自圖1a所示的實驗室倒立擺裝置說明書中提供的設備參數值,具體數據見表1。
2 系統控制方案
2.1 經典PID控制
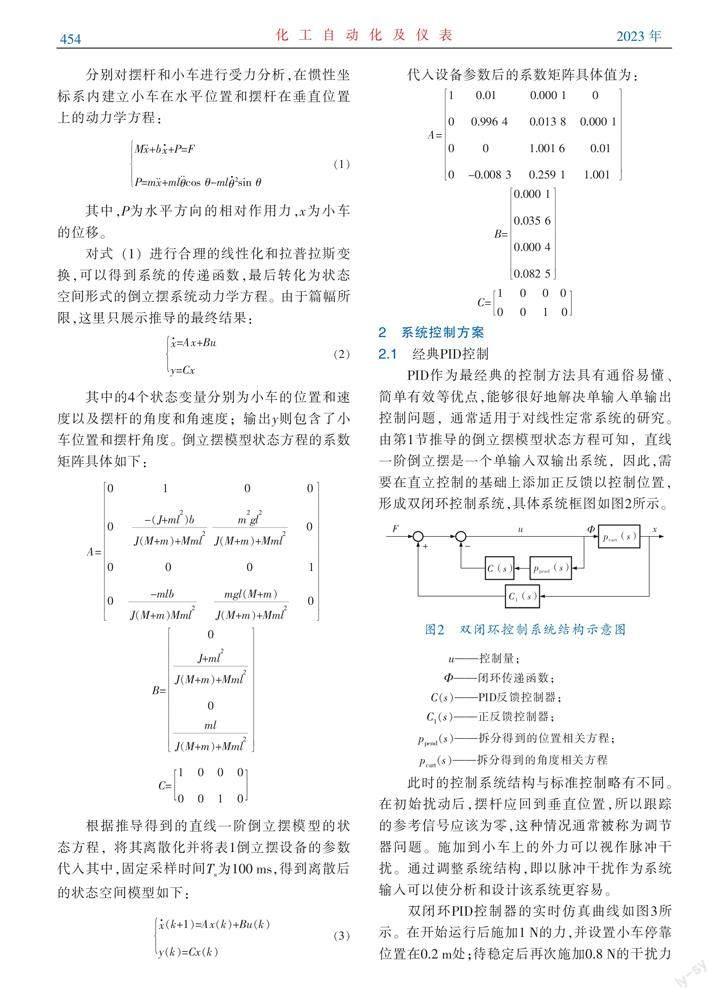
PID作為最經典的控制方法具有通俗易懂、簡單有效等優點,能夠很好地解決單輸入單輸出控制問題,通常適用于對線性定常系統的研究。由第1節推導的倒立擺模型狀態方程可知,直線一階倒立擺是一個單輸入雙輸出系統,因此,需要在直立控制的基礎上添加正反饋以控制位置,形成雙閉環控制系統,具體系統框圖如圖2所示。
2.2 狀態反饋控制器控制
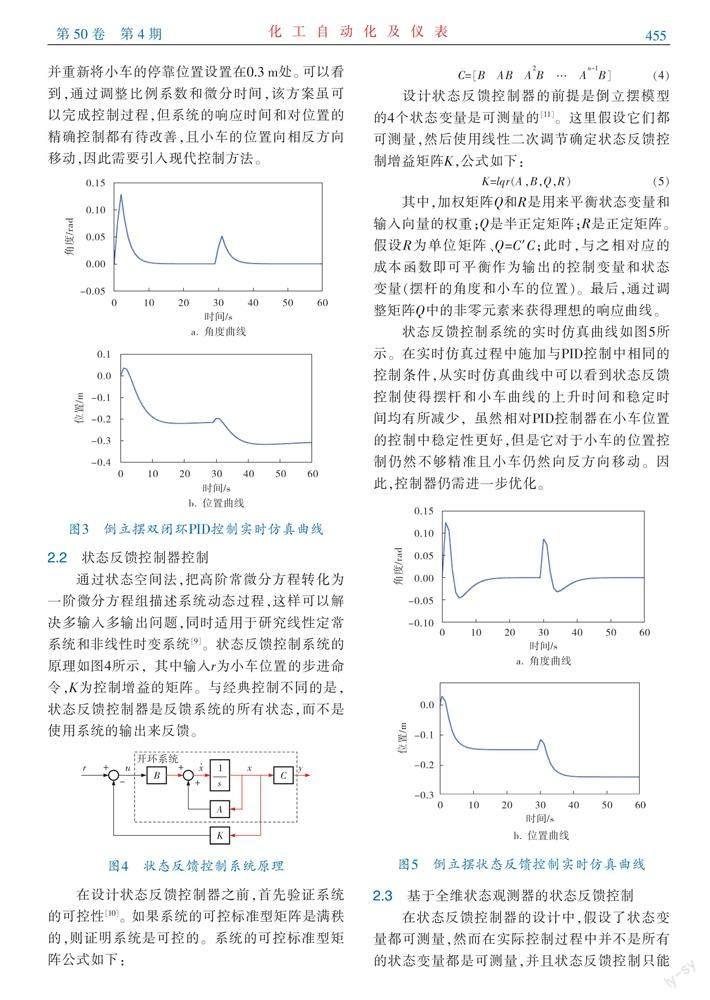
通過狀態空間法,把高階常微分方程轉化為一階微分方程組描述系統動態過程,這樣可以解決多輸入多輸出問題,同時適用于研究線性定常系統和非線性時變系統[9]。狀態反饋控制系統的原理如圖4所示,其中輸入r為小車位置的步進命令,K為控制增益的矩陣。與經典控制不同的是,狀態反饋控制器是反饋系統的所有狀態,而不是使用系統的輸出來反饋。
2.3 基于全維狀態觀測器的狀態反饋控制
在狀態反饋控制器的設計中,假設了狀態變量都可測量,然而在實際控制過程中并不是所有的狀態變量都是可測量,并且狀態反饋控制只能滿足瞬態要求,沒有考慮穩態誤差[11]。為了解決以上問題,必須利用可以觀測的量(輸入、輸出量)通過一個模型重新構造系統狀態以對所有狀態變量進行估計,該模型即狀態觀測器[12]。帶有全維狀態觀測器的狀態反饋控制的原理如圖6所示,其中■、■分別為x、y的估計值。
3 倒立擺實時仿真實驗平臺設計
本次設計選用MATLAB/GUI進行倒立擺仿真實驗平臺的開發[13]。利用GUI中的用戶圖形界面工具,在MATLAB/GUI自動生成的.m文件中編寫倒立擺模型程序、控制器程序和實時仿真程序。設計了模型參數設置、控制算法選擇及參數整定、實時仿真曲線及圖形動態顯示等界面,使用戶能夠在仿真之前自由填寫模型參數,在仿真過程中直觀地看到倒立擺的控制效果,并且仿真結束后可再次施加輕微擾動,觀察控制效果,使仿真過程更加貼合實際控制效果。
倒立擺仿真實驗平臺的實時仿真效果如圖8所示,左側為倒立擺模型參數設計界面,用戶可以設置不同倒立擺的參數,系統會自動計算參數并生成倒立擺模型;在仿真設置中,用戶可以選擇不同的控制算法,包括經典PID控制算法、LQR控制算法(狀態反饋控制器)和基于全維狀態觀測-狀態反饋控制器算法,并填寫相應的控制參數,系統根據用戶設置的參數反饋相應的增益矩陣數值。中間和右側分別為實時仿真曲線顯示界面和模型動態顯示界面,且模型動態顯示為運行結果放大10倍的效果,用戶可以同時觀察仿真曲線和動態模型,更加直觀地體會控制效果。可以看到,仿真曲線與動態模型是實時隨動的,且反饋的增益矩陣與理論計算結果相同,證明了所設計控制器與控制系統的合理性和有效性。
4 結束語
在慣性坐標系內建立了直線一階倒立擺的數學模型,以該模型方程為被控對象,設計了經典PID控制器、狀態反饋控制器和全維狀態觀測-狀態反饋控制器。然后用MATLAB/GUI設計了倒立擺實時仿真實驗平臺,編寫了控制器程序、實時仿真程序及模型動態顯示程序等。最后,利用實驗室倒立擺設備的參數,分別使用3款控制器對倒立擺系統進行實時仿真實驗。仿真結果表明:3款控制器都可以完成仿真控制實驗,且基于全維狀態觀測器的狀態反饋控制器的控制效果最優,證明了優化的合理性與有效性。
參 考 文 獻
[1] 于蕾,方蒽,紀雯.一階倒立擺系統建模與仿真研究[J].電子世界,2021(15):25-26.
[2] 王廣文,徐芷薇,王麗.倒立擺自適應模糊控制系統研究[J].數字技術與應用,2021,39(7):4-6.
[3] 王雯,崔建峰,武燕.倒立擺張量積分散LQR穩定控制[J].控制工程,2020,27(3):476-480.
[4] 伍曉麗,萬文略.基于無跡卡爾曼濾波的旋轉倒立擺LQR控制[J].測控技術,2017,36(4):93-97.
[5] OGUNTOSIN V,ORUMA S O,AKINDELE A,et al. Control Design of an Inverted Pendulum on a Moving Base Using State Feedback[J].IOP Conference Series:Materials Science and Engineering,2021,1107(1):012064.
[6]? ?KAREEM A F A,ALI A A H.Robust Stability Control of Inverted Pendulum Model for Bipedal Walking Robot[J].Al-Nahrain Journal for Engineering Scien-ces,2020,23(1):81-88.
[7]? ?YANG G H,LI H H.Design and Application of Modern Control Theory Simulation Experiment Platform Based on MATLAB[J].Open Access Library Journal,2020,7(12):1-12.
[8] 韓治國,許錦,陳能祥.基于Kalman濾波與滑模控制的倒立擺控制器設計[J].實驗室研究與探索,2021,40(6):101-105.
[9] 韓治國,陳能祥,許錦,等.基于BP神經網絡的倒立擺智能控制研究[J].實驗技術與管理,2021,38(6):101-106.
[10] 王鵬飛,杜忠華,牛坤,等.基于改進粒子群算法的倒立擺LQR優化控制[J].計算機仿真,2021,38(2):220-224;272.
[11] 王俊偉,于新海,溫榮,等.倒立擺狀態觀測器的輸出反饋控制器研究[J].機床與液壓,2021,49(8):152-155.
[12] 張新榮,馬杰,張才斗,等.基于MATLAB倒立擺可視化建模仿真與控制[J].計算機工程與設計,2018,39(10):3214-3219.
[13] 易磊,張蓉,鄧春花,等.基于直線倒立擺的自控實驗平臺研究[J].實驗技術與管理,2021,38(1):99-104.
(收稿日期:2022-11-25,修回日期:2023-05-14)
Optimization and Real-time Simulation of Inverted
Pendulum Control System
LIU Jia-weia, SONG Nanb, DONG Wen-qia, CAO Yu-boa
(a. College of Information and Control Engineering; b. College of Petrochemical Engineering,
Jilin Institute of Chemical Technology)
Abstract? ?Through taking a linear first-order inverted pendulum as the object of study and based on Newtons second law of motion,? the mathematical model of space expression for the inverted pendulum was established and analyzed in inertial coordinate system. On this basis, the simulation of inverted pendulum control system based on classical PID controller, state feedback controller and the state feedback controller of full-dimensional state observer was designed and implemented, including having MATLTB script language based to design a real-time simulation experiment platform for the inverted pendulum. Operating result indicates that, the state feedback controller of the optimized full-dimensional state observer has better control effect. The simulation results are in good agreement with the actual equipment running state
Key words? ?first-order inverted pendulum, full-dimensional state observer, state feedback controller, PID controller, scripting, real-time simulation
