基于圖像和人工魚(yú)群算法的建筑火災(zāi)動(dòng)態(tài)疏散路徑規(guī)劃研究
2023-08-11 13:52:59賈科進(jìn)李佳玥杜云李飛飛張效瑋
河北工業(yè)科技 2023年1期
關(guān)鍵詞:人臉識(shí)別
賈科進(jìn) 李佳玥 杜云 李飛飛 張效瑋
關(guān)鍵詞:人工智能理論;路徑規(guī)劃;人工魚(yú)群算法;建筑火災(zāi);柵格法;人臉識(shí)別
中圖分類(lèi)號(hào):TP391.9 文獻(xiàn)標(biāo)識(shí)碼:A DOI: 10.7535/hbgykj.2023yx01005
近年來(lái),大型建筑物的設(shè)計(jì)愈加復(fù)雜,建筑火災(zāi)等安全隱患一直存在。一旦出現(xiàn)火情,建筑自身結(jié)構(gòu)和材料的復(fù)雜性,煙氣流動(dòng)和風(fēng)力作用,使得火勢(shì)蔓延迅速、火災(zāi)撲救困難、人員撤離緩慢,而傳統(tǒng)的靜態(tài)疏散系統(tǒng)因?yàn)闊o(wú)法根據(jù)著火點(diǎn)信息和人員擁擠程度對(duì)路徑進(jìn)行及時(shí)調(diào)整,容易造成堵塞,無(wú)法引導(dǎo)人群快速逃生,延誤最佳逃生時(shí)間。因此,動(dòng)態(tài)疏散系統(tǒng)的研究對(duì)保障人員安全、快速有效疏散具有重要意義。
近些年來(lái),學(xué)者們對(duì)如何利用人群疏散系統(tǒng)更合理、更智能地進(jìn)行路徑規(guī)劃[1]開(kāi)展了大量的研究。PELECHANO等[2]基于擁擠仿真模型,把應(yīng)急疏散過(guò)程中人員受安全教育程度和個(gè)體相互協(xié)助對(duì)疏散效率的影響考慮進(jìn)去,得到最優(yōu)路徑。ALIZADEH[3]提出一種動(dòng)態(tài)的元胞自動(dòng)機(jī)模型[4]來(lái)模擬在有障礙的空間下進(jìn)行的疏散,分別考慮疏散人員的心理、出口位置、寬度和障礙物的位置等基本參數(shù),認(rèn)為疏散人員的初始分布在獲得的結(jié)果中起重要作用。學(xué)者們還將遺傳算法、Dijkstra算法[5]和蟻群算法[6]等智能優(yōu)化算法引入建筑火災(zāi)疏散的路徑規(guī)劃研究中,不斷對(duì)疏散模型進(jìn)行改進(jìn)優(yōu)化。如張慧彬等[7]基于遺傳算法的優(yōu)化方法,采用自然數(shù)編碼進(jìn)行路徑規(guī)劃,確定輪盤(pán)賭算子、單點(diǎn)交叉算子和互換變異算子,然后通過(guò)數(shù)值實(shí)驗(yàn)?zāi)M疏散,分析計(jì)算出最優(yōu)路徑。曹祥紅等[8]提出了基于Dijkstra-ACO混合算法的應(yīng)急疏散路徑動(dòng)態(tài)規(guī)劃,先在算法迭代進(jìn)程中利用經(jīng)典Dijkstra算法依次通過(guò)路徑相關(guān)節(jié)點(diǎn),來(lái)生成初始次優(yōu)路徑,然后在初始路徑的基礎(chǔ)上,應(yīng)用蟻群算法求解出全局最優(yōu)路徑的方案,實(shí)現(xiàn)動(dòng)態(tài)疏散。
但是這些疏散系統(tǒng)依舊存在著不足,無(wú)法兼顧人群行為、火災(zāi)信息和擁堵情況來(lái)實(shí)現(xiàn)動(dòng)態(tài)疏散。而人工魚(yú)群算法的魚(yú)類(lèi)群體協(xié)作過(guò)程與疏散中的人群行為表現(xiàn)類(lèi)似,能夠形象化地描述人員疏散的不同行為[9]。因此,本文結(jié)合圖像識(shí)別,將人工魚(yú)群算法應(yīng)用于建筑火災(zāi)疏散的路徑優(yōu)化問(wèn)題中。
完整的火災(zāi)應(yīng)急疏散系統(tǒng)包括火災(zāi)智能檢測(cè)裝置(攝像頭、傳感器等)、服務(wù)器、中央電源控制器、智能控制器分機(jī)、疏散示意圖和動(dòng)態(tài)消防指示燈、應(yīng)急照明燈等幾部分[10-11]。本文研究的建筑火災(zāi)動(dòng)態(tài)疏散路徑規(guī)劃問(wèn)題,是服務(wù)器基于著火點(diǎn)和人群擁堵程度進(jìn)行動(dòng)態(tài)疏散人群的軟硬件結(jié)合的應(yīng)用。本文只涉及算法部分,通過(guò)構(gòu)建柵格地圖,用魚(yú)群覓食來(lái)模擬建筑火災(zāi)下的人員疏散過(guò)程,再通過(guò)引入魚(yú)群的可行解代替最優(yōu)解,避免魚(yú)群陷入局部最優(yōu)和全局最優(yōu)相互干擾的情況,然后結(jié)合攝像頭判斷當(dāng)前路徑是否擁擠,從而實(shí)現(xiàn)火災(zāi)疏散路徑的動(dòng)態(tài)優(yōu)化,然后通過(guò)控制疏散指示燈,引導(dǎo)人群實(shí)現(xiàn)動(dòng)態(tài)疏散。能夠同時(shí)顧及個(gè)體本能反應(yīng)和群體影響,解決了靜態(tài)疏散系統(tǒng)規(guī)劃路徑固定、不能隨火災(zāi)發(fā)生情況和人群擁擠程度及時(shí)更新的問(wèn)題。
1 相關(guān)研究基礎(chǔ)
1.1 環(huán)境建模
當(dāng)火災(zāi)發(fā)生時(shí),算法的任務(wù)是通過(guò)已知內(nèi)部建筑結(jié)構(gòu)的前提下,進(jìn)行全局路徑規(guī)劃,為了測(cè)試算法的可行性,以一單層建筑為例,對(duì)建模環(huán)境有如下描述。
1)已知該樓層所有建筑信息和火災(zāi)情況。
2)已知建筑內(nèi)人員的數(shù)量和所有安全通道出口的位置[12],假設(shè)逃生人員聚集在同一區(qū)域中,并且初始位置已知。
3)逃生過(guò)程中需要考慮逃生路線長(zhǎng)度、環(huán)境溫度、有毒氣體濃度、以及逃生路線的擁擠度。
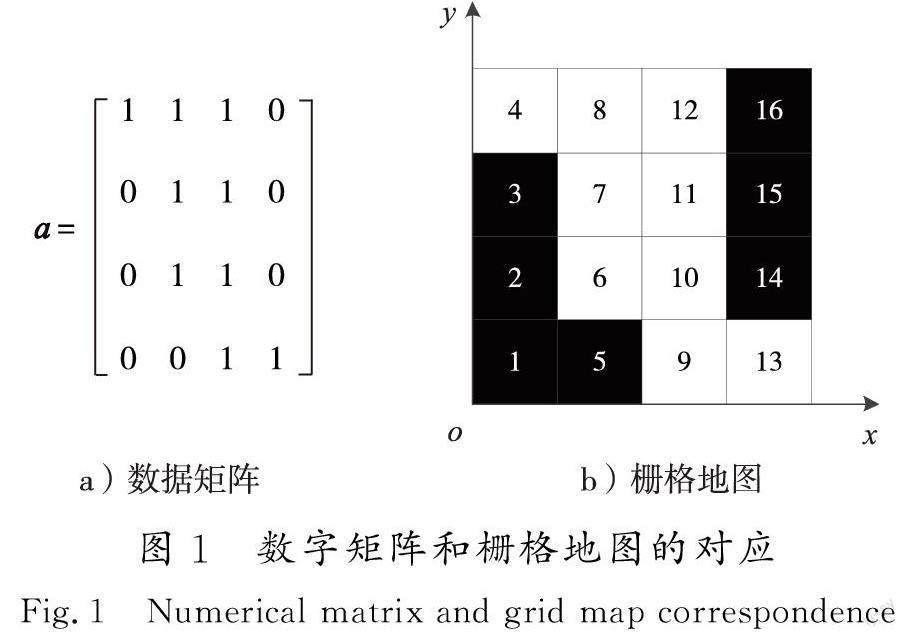
為了方便分析和研究,將所有環(huán)境信息進(jìn)行柵格化處理,建立相應(yīng)的數(shù)字矩陣,而后根據(jù)矩陣來(lái)生成對(duì)應(yīng)柵格地圖[13]。在矩陣中,分別用0和1來(lái)表示柵格環(huán)境下的障礙物區(qū)域和可行區(qū)域。如圖1所示,柵格地圖可通過(guò)矩陣行列的坐標(biāo)轉(zhuǎn)換來(lái)實(shí)現(xiàn)一一對(duì)應(yīng)。
式中:Nx和Ny分別表示矩陣a 的行數(shù)和列數(shù);mod函數(shù)為求余函數(shù),其格式為mod(number,divisor),number為被除數(shù),divisor為除數(shù),求解結(jié)果為兩數(shù)值作除法運(yùn)算后的余數(shù),且結(jié)果符號(hào)與除數(shù)符號(hào)相同;fix函數(shù)是一種取整函數(shù)、截?cái)嗪瘮?shù),其格式為fix(number),取整規(guī)則是向最靠近零取整,即刪除number參數(shù)的小數(shù)部分并返回以整數(shù)表示的結(jié)果。
在柵格環(huán)境下建立規(guī)模為20×20的仿真模型,同時(shí)根據(jù)已知的相關(guān)建筑信息和火災(zāi)情況進(jìn)行障礙物的設(shè)置,模擬真實(shí)環(huán)境。在20×20的柵格環(huán)境中,柵格序號(hào)是由從下至上、從左至右的數(shù)字進(jìn)行填充,即填充1~400。
模擬建筑正常和火災(zāi)時(shí)環(huán)境的柵格地圖如圖2所示,其中黑色區(qū)域表示障礙物,不可通行;白色區(qū)域表示可行區(qū)域,而疏散路徑的規(guī)劃只能在可行區(qū)域內(nèi)進(jìn)行;黃色區(qū)域表示著火點(diǎn)的位置(11,8),當(dāng)柵格地圖上出現(xiàn)黃色區(qū)域時(shí),表示當(dāng)前有火災(zāi)發(fā)生,需要繞行。
通過(guò)引入可行解解決了局部最優(yōu)解和全局最優(yōu)解相互干擾的問(wèn)題,可行解是記錄個(gè)體魚(yú)的位置信息,傳統(tǒng)人工魚(yú)群算法是在魚(yú)群中所有個(gè)體魚(yú)本次迭代中的最優(yōu)位置,即局部最優(yōu)解,進(jìn)而當(dāng)局部最優(yōu)解相連接時(shí),可能會(huì)出現(xiàn)全局解越障的行為。
1.3 圖像檢測(cè)人數(shù)信息
擁堵,是指一種人多擁擠且移動(dòng)速度緩慢的現(xiàn)象。通常情況下,同一范圍內(nèi)的人數(shù)越多,人與人之間的距離會(huì)越小,人員的移動(dòng)速度就會(huì)越慢。比如,在一個(gè)攝像頭的監(jiān)控范圍內(nèi),該空間最多容納15個(gè)人才能保持一定的移動(dòng)速度,那么當(dāng)識(shí)別到人數(shù)超過(guò)15人時(shí),則認(rèn)為該監(jiān)控范圍內(nèi)的路徑出現(xiàn)擁堵。
路徑是否出現(xiàn)擁堵情況是影響人員疏散的重要因素之一。由于最后通向安全出口位置的路徑一般比較簡(jiǎn)單,大多是直通通道,且安全通道滿(mǎn)足消防規(guī)范要求的凈寬度即可,通常不會(huì)設(shè)置太寬,因此人數(shù)過(guò)多時(shí)容易造成擁堵。而交叉口和轉(zhuǎn)角等位置也容易聚集人員,具有很大的擁堵可能性。應(yīng)急疏散指示燈可根據(jù)圖4進(jìn)行設(shè)置,來(lái)分散一些人員壓力。3種疏散指示如圖5所示。
此外,還需要通過(guò)安置在各個(gè)安全出口、交叉口等位置的監(jiān)控?cái)z像頭來(lái)采集人數(shù)信息,并判斷擁堵情況、選擇合適疏散路徑。
根據(jù)建筑室內(nèi)信息,在出入口位置和十字路口位置安裝可旋轉(zhuǎn)式監(jiān)控?cái)z像頭,可以選取TP-LINK的TL-IPC44K-4;其余過(guò)道、小房間門(mén)口等位置安裝固定式監(jiān)控?cái)z像頭,可以選取海康威視3326FWDA3/C-IS。
監(jiān)控點(diǎn)位置布局如圖6 所示,紫色圓點(diǎn)表示360°可旋轉(zhuǎn)監(jiān)控?cái)z像頭位置,大概需要12個(gè),紅色圓點(diǎn)表示固定式監(jiān)控?cái)z像頭位置,大概需要24個(gè)。監(jiān)控?cái)z像頭的具體安裝高度和角度需根據(jù)實(shí)際情況進(jìn)行調(diào)整。
選擇疏散路徑的流程圖如圖7所示,首先用攝像頭采集圖像信息,然后通過(guò)OpenCV 進(jìn)行人臉識(shí)別來(lái)檢測(cè)人數(shù)信息,再根據(jù)實(shí)際安全通道出口的容量設(shè)置一個(gè)合適的臨界值。當(dāng)識(shí)別到的人數(shù)大于等于臨界值時(shí)視為當(dāng)前安全通道呈擁堵?tīng)顟B(tài),需要調(diào)整次優(yōu)疏散路徑為臨時(shí)的最優(yōu)路徑,從而減輕擁堵安全通道的逃生負(fù)擔(dān),保障疏散快速進(jìn)行;當(dāng)識(shí)別到的人數(shù)小于臨界值時(shí)視為安全通道呈暢通狀態(tài),可保持當(dāng)前的最優(yōu)疏散路徑繼續(xù)正常通行。圖像檢測(cè)人數(shù)信息結(jié)果如圖8所示。
2 疏散模型的構(gòu)建及算法實(shí)現(xiàn)
2.1 人工魚(yú)群算法疏散模型構(gòu)建基礎(chǔ)
為了驗(yàn)證基于人工魚(yú)群算法進(jìn)行建筑火災(zāi)人員疏散方案的有效性,以一大型商場(chǎng)為仿真實(shí)驗(yàn)的工程背景,目前只考慮該建筑一層的人員疏散路徑規(guī)劃。構(gòu)建20×20的柵格地圖,標(biāo)記當(dāng)前所在位置為起始位置START,4個(gè)安全通道出口上、下、左、右各一個(gè),記為目標(biāo)點(diǎn)并在圖中用GOAL標(biāo)出。
人群朝各個(gè)出口疏散過(guò)程可類(lèi)似看作魚(yú)群的覓食過(guò)程,疏散個(gè)體可看作人工魚(yú)個(gè)體,將疏散人群的數(shù)目、位置、步長(zhǎng)和感知范圍等參數(shù)數(shù)據(jù)根據(jù)魚(yú)群算法一一設(shè)定。
2.2 算法的實(shí)現(xiàn)過(guò)程
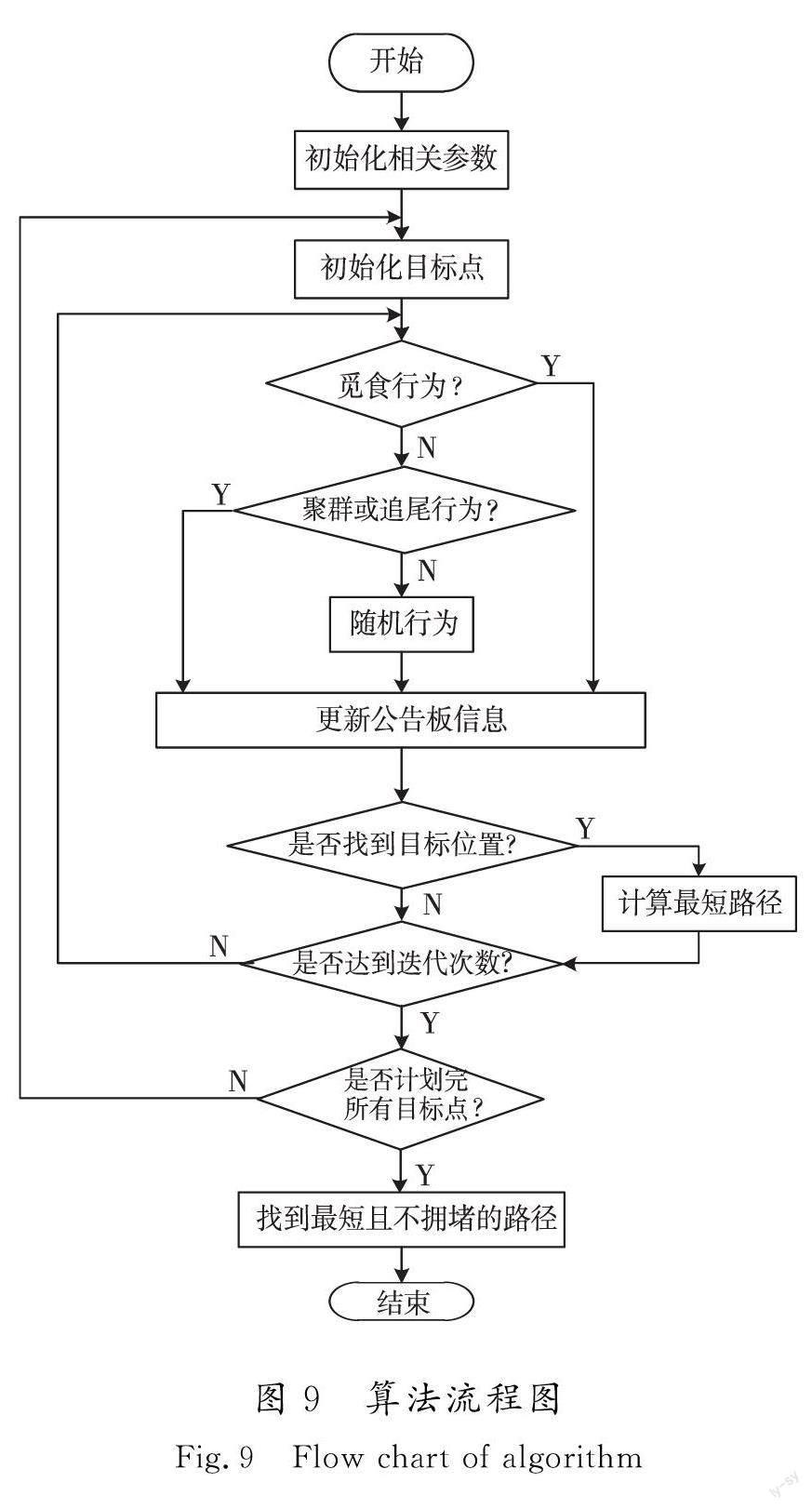
算法的具體實(shí)現(xiàn)步驟如下。
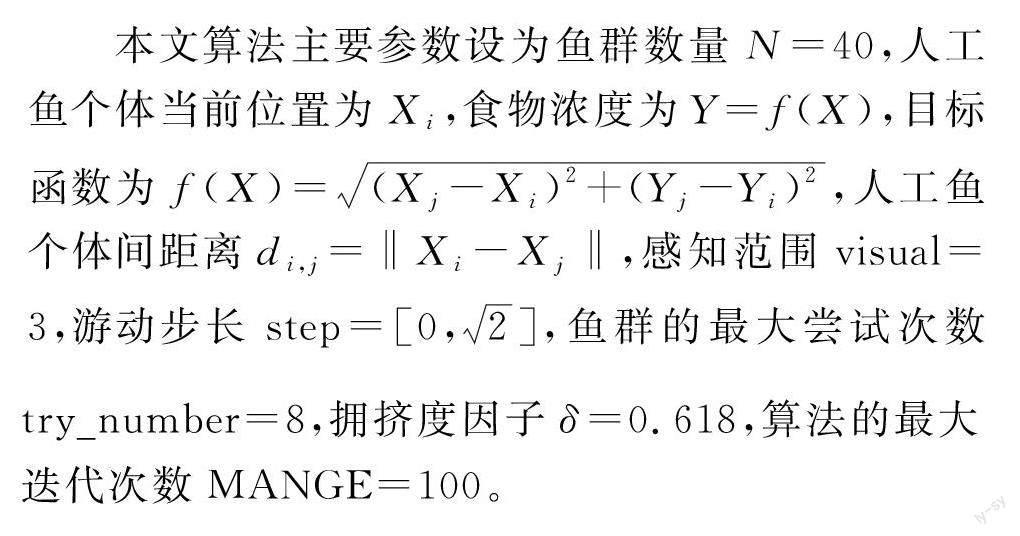
Step1:初始化相關(guān)參數(shù)。參數(shù)包括數(shù)量N 、步長(zhǎng)step、感知范圍visual、擁擠度因子δ 和最大迭代次數(shù)等。
Step2:初始化目標(biāo)點(diǎn)。
Step3:條件判斷。判斷是否執(zhí)行覓食行為,是則更新公告板信息,否則執(zhí)行下一步。
Step4:條件判斷。判斷是否執(zhí)行聚群或追尾行為,是則更新公告板信息,否則執(zhí)行隨機(jī)行為后更新公告板信息。
Step5:條件判斷。判斷是否找到目標(biāo)位置,是則計(jì)算最短路徑并跳到Step6。
Step6:條件判斷。判斷是否達(dá)到迭代次數(shù),是則繼續(xù)執(zhí)行下一步,否則返回到Step3。
Step7:條件判斷。判斷是否計(jì)劃了所有目標(biāo)點(diǎn),是則繼續(xù)下一步,否則返回Step2。
Step8:找到最短且不擁堵的路徑,結(jié)束。
算法流程圖如圖9所示。
3 仿真模擬及結(jié)果分析
在上述建立的20×20的柵格環(huán)境中驗(yàn)證基于人工魚(yú)群算法的疏散效果。
在模擬建筑環(huán)境和模擬建筑火災(zāi)環(huán)境兩種柵格地圖下,設(shè)置起始點(diǎn)位置START,即人員當(dāng)前位置為(11,10),用紅色實(shí)心點(diǎn)表示。目標(biāo)點(diǎn)位置GOAL有4個(gè),從最下面的安全通道出口開(kāi)始,按順時(shí)針順序分別設(shè)置在(9,1)、(1,10)、(10,20)、(20,10),其目標(biāo)點(diǎn)位置對(duì)應(yīng)是161,10,200,390,可分別記為出口1、出口2、出口3以及出口4,用綠色實(shí)心點(diǎn)表示。人工魚(yú)群算法規(guī)劃路徑的結(jié)果用紅色圓圈實(shí)線表示。
3.1 正常情況下到各出口的疏散路徑規(guī)劃
從起始點(diǎn)位置分別到4個(gè)目標(biāo)點(diǎn)位置的最短距離如表1所示。
在當(dāng)前位置下,如圖10的a)—d)所示,分別是到4個(gè)安全通道出口的最短路徑規(guī)劃結(jié)果。
3.2 火災(zāi)發(fā)生時(shí)到各出口的疏散路徑規(guī)劃
在火災(zāi)發(fā)生的情況下,將著火點(diǎn)位置添加到柵格地圖中,柵格圖的障礙區(qū)域和可通行區(qū)域發(fā)生改變,從起始點(diǎn)位置分別到4個(gè)目標(biāo)點(diǎn)位置的最短路徑長(zhǎng)度會(huì)根據(jù)火災(zāi)點(diǎn)位置的變化而發(fā)生變化。當(dāng)前最短距離如表2所示。
如圖11所示,著火點(diǎn)的位置坐標(biāo)為(11,8),到4個(gè)安全通道出口的最短路徑規(guī)劃結(jié)果如圖11的a)—d)所示。
人工魚(yú)群算法在不同情況下的路徑規(guī)劃圖如圖12所示。疏散示意圖可根據(jù)圖12 b)中的最優(yōu)路徑顯示,調(diào)節(jié)動(dòng)態(tài)消防指示燈,按規(guī)劃出的路線指引逃生。若攝像頭通過(guò)采集圖像識(shí)別到通往最優(yōu)路徑的安全出口逃生的人數(shù)過(guò)多時(shí),則判斷該條路徑為擁堵,擁堵的安全通道出口用品紅色標(biāo)記。為避免擁堵,保證所規(guī)劃的路徑可以快速地疏散人群,可先調(diào)節(jié)應(yīng)急指示燈指向次優(yōu)路徑的安全出口逃生,如圖12 c)所示,通過(guò)分散人群來(lái)縮短疏散時(shí)間。若經(jīng)過(guò)一定的緩沖時(shí)間,安全通道出口的負(fù)擔(dān)減輕后,可繼續(xù)按圖12 b)調(diào)節(jié)動(dòng)態(tài)消防指示燈,優(yōu)先指向最佳可行路徑。
3.3 多起點(diǎn)到各出口的疏散路徑規(guī)劃
在模擬火災(zāi)環(huán)境的柵格地圖中,添加一個(gè)新的起始位置,坐標(biāo)為(15,14),并用藍(lán)色實(shí)心點(diǎn)表示,旁邊標(biāo)有藍(lán)色的START 字樣。其他信息不變,還是按照之前的起始位置、火災(zāi)點(diǎn)位置和4個(gè)出口位置來(lái)設(shè)置。如圖13所示,是人工魚(yú)群算法在多起點(diǎn)情況下的路徑規(guī)劃圖。其中,紅色圓圈并用實(shí)線連接的路徑是起點(diǎn)(11,10)的規(guī)劃圖,藍(lán)色圓圈并用實(shí)線連接的路徑是起點(diǎn)(15,14)的規(guī)劃圖。
根據(jù)規(guī)劃結(jié)果可以發(fā)現(xiàn),在2個(gè)起點(diǎn)位置規(guī)劃出的路徑會(huì)在出口1方向上進(jìn)行重疊,這極易造成出口1出現(xiàn)擁堵情況,擁堵后的路徑規(guī)劃如圖14所示。
根據(jù)路徑規(guī)劃圖及時(shí)調(diào)整疏散指示燈的方向,待擁堵?tīng)顟B(tài)緩解后,重新規(guī)劃的路徑如圖15所示。
3.4 不同算法下疏散效果對(duì)比分析
遺傳算法是通過(guò)模仿自然界的選擇與遺傳的機(jī)理來(lái)尋找最優(yōu)解的進(jìn)化算法,是具有隨機(jī)性的全局優(yōu)化算法。遺傳算法有3個(gè)基本算子:選擇、交叉和變異。
蟻群算法是一種用來(lái)尋找優(yōu)化路徑的概率型算法。其靈感來(lái)源于螞蟻覓食過(guò)程中發(fā)現(xiàn)路徑的行為:不同的環(huán)境下,螞蟻尋找到最短到達(dá)食物源的路徑后,通過(guò)蟻群內(nèi)螞蟻間的信息傳遞,在經(jīng)過(guò)一段時(shí)間后,使得整個(gè)蟻群都沿著最短路徑到達(dá)食物源。
分別用遺傳算法和蟻群算法在著火時(shí)的柵格環(huán)境下進(jìn)行路徑規(guī)劃,遺傳算法的路徑規(guī)劃圖如圖16所示,規(guī)劃結(jié)果用綠色星星實(shí)線表示;蟻群算法的路徑規(guī)劃圖如圖17所示,規(guī)劃結(jié)果用藍(lán)色星星實(shí)線表示。然后與上文中人工魚(yú)群算法規(guī)劃出來(lái)的結(jié)果圖12 b)相比較,對(duì)比3種算法的疏散效果。
經(jīng)多次仿真可發(fā)現(xiàn),蟻群算法容易陷入局部最優(yōu),出現(xiàn)如圖18所示的死鎖狀態(tài)。為了便于對(duì)比分析,分別記錄3種算法的20次有效數(shù)據(jù),包括同一起點(diǎn)到各個(gè)出口的路徑長(zhǎng)度、總路徑長(zhǎng)度和運(yùn)行時(shí)間等。
經(jīng)計(jì)算,20次仿真的平均數(shù)值結(jié)果如表3所示。根據(jù)表3中的數(shù)據(jù)可知,人工魚(yú)群算法的平均運(yùn)行時(shí)間比遺傳算法慢了1.06 s,但總路徑長(zhǎng)度減少了約2.86 m,與蟻群算法相比,平均運(yùn)行時(shí)間提快了2.76 s,規(guī)劃出的平均總路徑長(zhǎng)度約減少了12.22 m,整體疏散效率有所提高。人工魚(yú)群算法規(guī)劃的路徑存在少量冗余路段,各出口承擔(dān)的逃生壓力比較均衡,規(guī)劃出的路徑同最短路徑差異不大,規(guī)劃結(jié)果相對(duì)穩(wěn)定;遺傳算法規(guī)劃的路徑中冗余路段較多,各出口規(guī)劃效果相對(duì)穩(wěn)定但復(fù)雜地圖上的隨機(jī)性較大;蟻群算法規(guī)劃的路徑,出口1和出口3能直接規(guī)劃最短路徑,但遇到這種地圖上稍復(fù)雜些時(shí),出口2和出口4便會(huì)規(guī)劃出大量冗余路段,各出口路徑相差過(guò)大,規(guī)劃結(jié)果不穩(wěn)定,使得出口1和出口3的逃生負(fù)擔(dān)加重,不利于快速疏散。由此可知,人工魚(yú)群算法的穩(wěn)定性相對(duì)更好一些。
再根據(jù)記錄的這3種算法運(yùn)行后得到的時(shí)間和路徑長(zhǎng)度等仿真數(shù)據(jù)來(lái)繪制對(duì)比圖。其中,人工魚(yú)群算法的數(shù)據(jù)結(jié)果用紅色圓圈標(biāo)出,遺傳算法的數(shù)據(jù)結(jié)果用綠色星星標(biāo)出,蟻群算法的數(shù)據(jù)結(jié)果用藍(lán)色星星標(biāo)出,并分別用與數(shù)據(jù)點(diǎn)相同顏色的直線進(jìn)行連接,得到折線對(duì)比圖。如圖19所示,是3種算法運(yùn)行時(shí)間對(duì)比圖,其中橫坐標(biāo)的數(shù)值表示第幾次仿真測(cè)試,取值范圍為1~20的整數(shù),縱坐標(biāo)表示每次運(yùn)行后所對(duì)應(yīng)的時(shí)間。如圖20所示,是3種算法規(guī)劃的路徑長(zhǎng)度對(duì)比圖,其中橫坐標(biāo)的數(shù)值依舊表示第幾次仿真測(cè)試,取值范圍還是1~20的整數(shù),而縱坐標(biāo)則表示每次運(yùn)行后所對(duì)應(yīng)的規(guī)劃出的路徑長(zhǎng)度。
根據(jù)上述時(shí)間和路徑長(zhǎng)度的對(duì)比圖可知,遺傳算法整體用時(shí)比人工魚(yú)群算法少1.06 s,但規(guī)劃的路徑效果相對(duì)較差一些,路徑長(zhǎng)度的整體變化浮動(dòng)都高于人工魚(yú)群算法。而人工魚(yú)群算法整體看來(lái)比蟻群算法用時(shí)要少,平均運(yùn)行時(shí)間快了2.76 s。在相近的時(shí)間內(nèi),人工魚(yú)群算法規(guī)劃的路徑長(zhǎng)度明顯更短,主要集中在46~50,且變化幅度相對(duì)平緩;蟻群算法規(guī)劃的路徑長(zhǎng)度相對(duì)更長(zhǎng),且變化幅度較大,主要集中在60左右。由此可見(jiàn),人工魚(yú)群算法與遺傳算法、蟻群算法相比,運(yùn)行時(shí)間相近,規(guī)劃路徑更短,穩(wěn)定性更好,疏散效率更高。
4 結(jié)語(yǔ)
本文將人工魚(yú)群算法應(yīng)用于建筑火災(zāi)人員疏散的方案中,利用人工魚(yú)群算法來(lái)模擬人群疏散過(guò)程,尋找最優(yōu)路徑,同時(shí)可結(jié)合人臉識(shí)別來(lái)及時(shí)更新各個(gè)路段上的人數(shù)信息,避免大量人員擁堵,造成個(gè)別安全通道逃生負(fù)擔(dān)加重,在時(shí)間和空間的雙重約束下實(shí)現(xiàn)動(dòng)態(tài)疏散人群。
仿真實(shí)驗(yàn)表明,該算法可行,通過(guò)將魚(yú)群的最優(yōu)解替換為可行解,使魚(yú)群避免陷入局部最優(yōu)或死鎖狀態(tài)。與遺傳算法和蟻群算法相比,該算法計(jì)算結(jié)果質(zhì)量更好且更加穩(wěn)定,在相同運(yùn)行時(shí)間內(nèi)規(guī)劃出的路徑長(zhǎng)度更短,使得人群可以通過(guò)更少時(shí)間、更短路徑、更高效率進(jìn)行動(dòng)態(tài)疏散。本文僅通過(guò)仿真實(shí)驗(yàn)對(duì)著火擁堵等情況下的人員疏散路徑進(jìn)行了規(guī)劃,未來(lái)還需在實(shí)際環(huán)境中進(jìn)一步驗(yàn)證和改進(jìn)。
猜你喜歡
作文中學(xué)版(2022年1期)2022-04-14 08:00:34
學(xué)生天地(2020年31期)2020-06-01 02:32:06
電子制作(2019年14期)2019-08-20 05:43:34
中國(guó)交通信息化(2018年1期)2018-06-06 07:29:55
電子制作(2017年17期)2017-12-18 06:40:55
中國(guó)公共安全(2017年7期)2017-10-13 08:18:26
電子制作(2017年1期)2017-05-17 03:54:46
中國(guó)公共安全(2017年9期)2017-02-06 03:05:32
現(xiàn)代工業(yè)經(jīng)濟(jì)和信息化(2016年6期)2016-05-17 05:36:23
華東理工大學(xué)學(xué)報(bào)(自然科學(xué)版)(2015年2期)2015-11-07 09:16:51
