人體靜電電位信號數據對齊方法研究
2023-08-11 13:52:59張永強于洪昌周萬珍滿夢華
河北工業科技 2023年1期
張永強 于洪昌 周萬珍 滿夢華
關鍵詞:數據處理;人體靜電;電位信號;數據對齊;起始點檢測;特征提取
中圖分類號:TP399 文獻標識碼:A DOI: 10.7535/hbgykj.2023yx01006
隨著物聯網技術的進步以及測量技術的不斷發展,試驗過程中往往需要同時測量多種物理量,例如溫度、電壓、定位和速度等。不同物理量數據對齊,往往要求數據中含有時間戳,將讀取時間戳相同的傳感數據進行匹配,完成對齊[1]。然而,不同物理量的采集系統往往是獨立的,無法保證時間戳的精確同步。采用時間對齊方法處理數據將無法精確對齊,從而影響測試結果的準確性,不能滿足相關試驗所需的數據精度。
傳感器設備采集數據的相關試驗中,不同設備采集的數據之間起始點和終止點的對齊往往是試驗中的重要部分之一。對此,相關學者在不同領域的試驗研究中也提出了自己的解決方案。例如:羅思洋等[2]、黃鎮坤等[3]、董胡等[4]均利用雙門限算法實現了語音識別系統的端點檢測,該方法依據語音信號的語音段和噪聲段的特征差異,通過比較短時能量和短時過零率大小區分噪聲段和清音段[5]。陳昊澤等[6]提出了將語音信號的能量與頻帶方差的乘積值作為參數進行雙門限端點檢測的方法。音符起始點檢測常見的方法為峰值提取算法,通過提取峰值,閾值設定,判斷突變點的變化趨勢,得到音符起始點向量。其中,桂文明等[7-8]利用改進的峰值提取算法生成音符起始點向量,提升了音符起始點算法的性能。林靜等[9]通過計算譜能量差分函數的峰值點與設置能量門限的大小確定音符信號的起始點。胡新榮等[10]利用標準差歸一化的方法實現了人體三維骨骼數據信息的數據對齊。劉秀鋒等[11]通過利用彈體在飛行時的數據相關性,求出差的平方和的最小值,實現了實時采集數據對齊。以上方法只在特定單個傳感器系統數據的對齊中得到了部分應用,局限性較大。現有相關試驗文章大多數缺乏對數據對齊的探討,忽視了數據對齊的重要性。同時,少有學者對多傳感器測量系統中不同類型物理量數據的數據對齊方法進行深入研究。因此,本文探索多傳感器數據對齊方法,解決多設備數據采集時間同步問題,實現設備激活時間和數據的精確匹配。多傳感器測量系統往往把接觸式和非接觸式兩種測量方法組合在一起,要對齊的數據并不存在對應點,其密度和精度也均不同[12],這就使很多數據對齊方法無法應用到多種類型數據中。以本課題組進行的人體靜電電位信號的無線采集試驗為例[13],本文對四路非接觸式靜電電位傳感器、UWB 定位傳感器和兩路加速度傳感器3種不同類型傳感器采集的數據進行處理和對齊研究,討論不同類型物理量數據進行對齊操作方法上的異同點。通過波形分析和特征提取等工具提出了數據起始點和終止點對齊方法。根據數據變化特性,求出數據突變點,從而確定數據變化的起始點和終止點,實現數據對齊。
1 數據的采集和分析
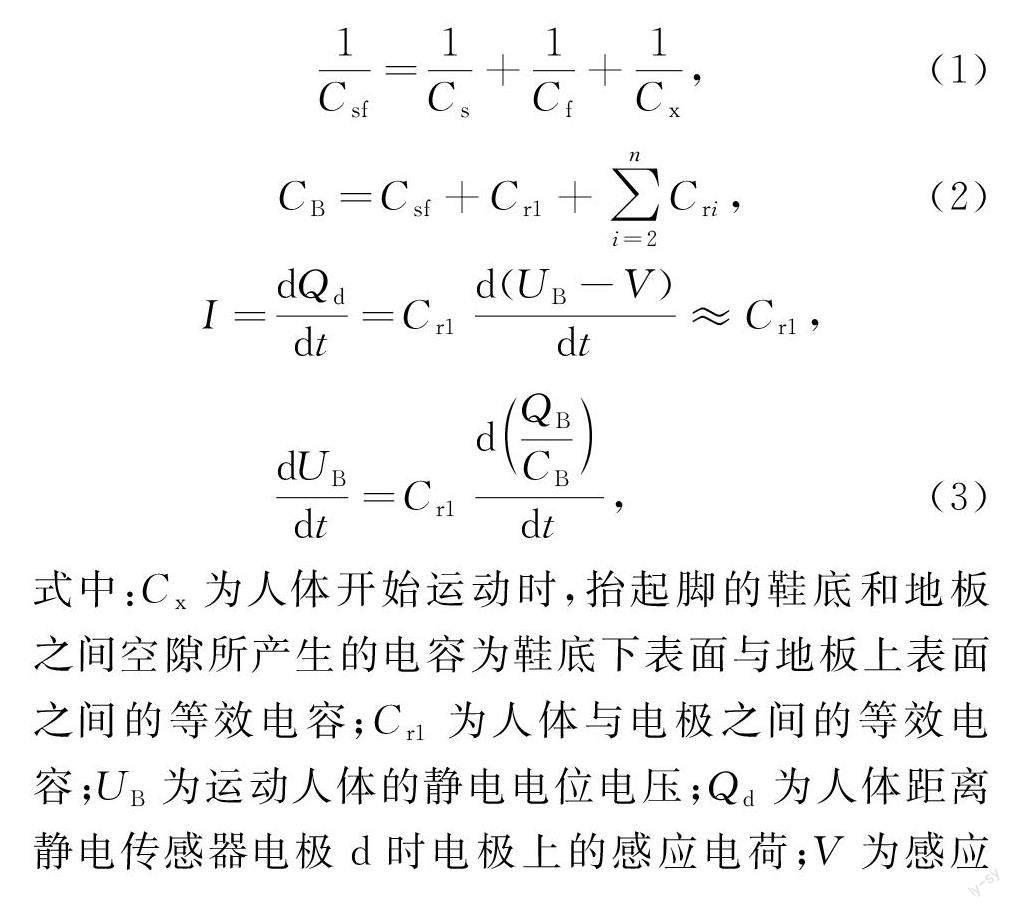
人體靜電電位信號的無線采集試驗采用遠距離非接觸式探測方法。人在行走過程中是帶電的,人體的腳和地板之間有2個高電阻層,分別是受試者的鞋底Cs和地板的表面Cf[14]。人體對大地的整體等效電容CB由雙腳和地板之間的耦合電容Csf和人體相對于地板上附近物體的電容Cri 的電容組成。假設QB為人體電荷量,則流過測量電極的感應電流I 可表示為
試驗在室內環境下,選取跳躍、行走、跑動3個典型日常動作,以識別不同待測人員在不同運動姿態下人體靜電電位信號的差異。人體與靜電傳感器的距離會隨著人體的移動發生變化,感應電極產生的感應電流強度也會受到影響。人體運動速度的變化也將時刻影響著人體靜電電位的變化。為了得到更加準確的人體靜電電位信號,數據采集完成后,需要根據人體到靜電傳感器的距離數據和加速度數據對靜電傳感器檢測的信號進行補償計算。試驗場景如圖1所示,采用四路非接觸式靜電電位傳感器、UWB定位傳感器和兩路加速度傳感器分別對人體靜電電位信號、人體運動距離和人體運動加速度進行檢測。
將采集到的人體靜電電位信號以樣本容量為橫軸、電壓值為縱軸,根據不同運動狀態分別繪制波形圖,如圖2 a)—c)所示。試驗過程中人體運動狀態為靜止—運動—靜止,因此,圖中開始段和結束段檢測的靜電電位信號值變化趨于平緩,而隨著試驗人體運動狀態的改變,人體靜電電位信號的波形也出現明顯的差異和波形特性。
UWB定位傳感器采用調制脈沖信號實現了厘米級的測距精度[15-16]。通過ToF(time of flight)飛行時間測距法[17]測得定位標簽(A0)到定位基站(T0,T1,T2)間的距離(d0,d1,d2)。利用三邊測量法[18-19]確定標簽傳感器的坐標,即被測人體坐標(x,y)。然后,通過計算人體坐標(x,y)和4路靜電傳感器(A,B,C,D)的坐標(Xi,Yi)的距離得到試驗所需要的數據,把問題轉化為求解交點和兩點之間距離問題。以步行為例,如圖3所示,利用MATLAB函數,以樣本容量為橫軸,采集并計算后的距離數據為縱軸進行繪圖操作,得到人體運動過程中與四路靜電傳感器(A,B,C,D)之間距離數值的變化曲線。
當人體運動時,加速度模塊主要實現三維平面上人體運動加速度數據的檢測,通過人體加速度在人體坐標系中進行各軸向的分解來獲取,即沿著X ,Y,Z 3個軸向的人體加速度數據進行采集[20]。以步行為例,如圖4所示,利用MATLAB函數,以樣本容量為橫軸,采集的加速度數據為縱軸進行繪圖操作,得到的人體運動過程中加速度在3個方向的數值變化曲線。
非接觸式靜電電位傳感器模塊、UWB 定位傳感器模塊和加速度傳感器模塊是3個分別獨立的系統。由于3個系統均沒有授時系統,不能對數據采樣點進行統一的時間標記,時間標簽無法做到毫秒量級的精確對時。因此,數據采集的同時,得到的不同物理量數據存在相位上的誤差,即不同信號和數據的起始點和終止點存在差異。需要進一步把不同設備采集的數據對齊到同一個基準時刻,從而獲得同一時刻的靜電電位值、距離值和加速度值。此外,根據圖2、圖3和圖4可以看出,不同類型傳感器采集的數據隨著人體運動產生的數據變化存在很大的差異。其在波形特性、變化趨勢、起始點特征以及周期性等方面均有不同。為了準確計算出運動時不同數據的起始點和終止點,本文在進行數據對齊操作時,針對不同類型的數據采用了不同的計算過程和對齊方法。運動人體靜電電位信號數據對齊業務示意圖如圖5所示。
2 試驗數據的對齊
在試驗過程中,數據對齊操作最主要是起始點和終止點的檢測。為了準確提取人體運動數據的起始點和終止點,試驗采集過程中被測人體從保持靜止一段時間到開始運動,再到靜止。在數據的開頭和結尾會出現一段相對平穩的數據段,方便對運動狀態的數據起始點和終止點進行檢測。
2.1 人體靜電電位信號模塊的對齊
人體靜電電位信號數據的對齊操作主要包括:數據清洗、起始點與終止點的提取操作。根據試驗要求,利用了MATLAB函數工具針對人體靜電電位信號數據進行數據對齊。
2.1.1 數據清洗操作
對采集到靜電電位信號的數據清洗工作,主要是為了消除由于試驗場地周圍帶電物體、采集設備自身系統限制、環境噪聲和被測人體殘留靜電等噪聲對提取人體運動信號起始點與終止點正確性的影響。數據清洗操作主要包括降噪濾波、降采樣和去偏移3部分。
1)降噪濾波 試驗中降噪濾波采用MATLAB數字濾波器[21]對原始靜電數據進行降噪處理,可排除一些無用信號和噪聲干擾。
2)降采樣 降采樣過程降低數據量大小,并將數據集重新采樣為固定頻率。
3)去偏移 該過程主要分為兩步。首先由于靜電傳感器在設備啟動和關閉過程中存在系統抖動和噪聲因素的影響,需要在信號的起始位置和終止位置去掉振鈴,即去掉n 個點,本試驗中令n=10。其次,由于人體殘留靜電電位影響,靜止時靜電信號電壓值不等于0,因此,需要通過取前m (m =100)個點的均值作為偏置量,即人體在運動前靜止站立1 s內的人體靜電電位均值。將重采樣后的數據減去偏置量,從而使得靜電信號在靜止時電壓值靠近0,同時保證靜電信號電壓值波動范圍在電壓值正值或負值的同一側。
2.1.2 起始點與終止點的提取
試驗中人體的運動過程是:靜止—運動—靜止。因此采集的人體靜電定位信號數據由靜止狀態切換到運動狀態的時刻為數據變化點,此點即為數據對齊的起始點。靜電信號數據由運動狀態切換到靜止狀態的時刻為數據不變點,此點即為數據對齊的終止點。靜電信號數據的對齊操作,鑒于原始數據中靜電信號數據是隨著動作不斷變化,試驗首先采用靜電信號相鄰數據點之間的一階差分形式來度量數據變化。通過計算連續10個數據點的方差確定第一個突變點和最后一個突變點,即為數據對齊的起始點和終止點。以步行為例:一階差分如式(4)所示。
步行狀態下,A 路靜電信號經過一階差分計算得到的相鄰數據點差值的變化趨勢如圖6所示。可以看出,隨著人體運動狀態的改變,相鄰數據點差值大小發生了明顯的變化。
首先,對人體靜電電位信號的一階差分變化值分別進行連續10個數據點的方差計算。通過計算方差的變化進行查找,分別得到靜電電位信號的第一個突變點和最后一個突變點。然后,將第一個突變點索引的最小值作為靜電信號的起始點時刻,將最后一個突變點索引的最大值作為靜電信號的終止點時刻,即為數據對齊的起始點和終止點。
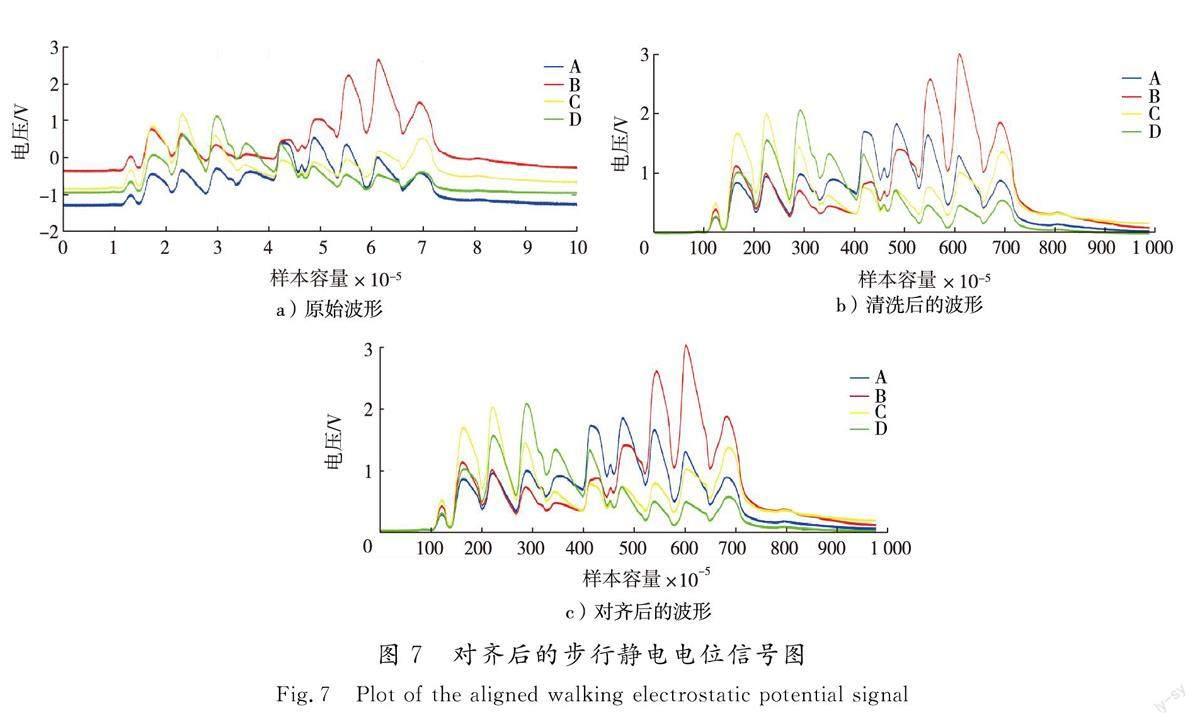
以步行為例,經過數據清洗以及起始點和終止點提取操作后,人體靜電電位信號的波形如圖7所示。
將圖7 a)與圖7 b)對比可知,數據清洗操作在保留有效波形信息的基礎上有效去除了未處理前信號波形上的高頻噪聲。圖7 c)在數據清洗基礎上實現了起始點和終止點的提取,并從各自數據清洗后的波形中刪除起始點時刻之前和終止點時刻之后的數據樣本,完成靜電信號數據的對齊工作。
2.2 UWB定位模塊數據的對齊
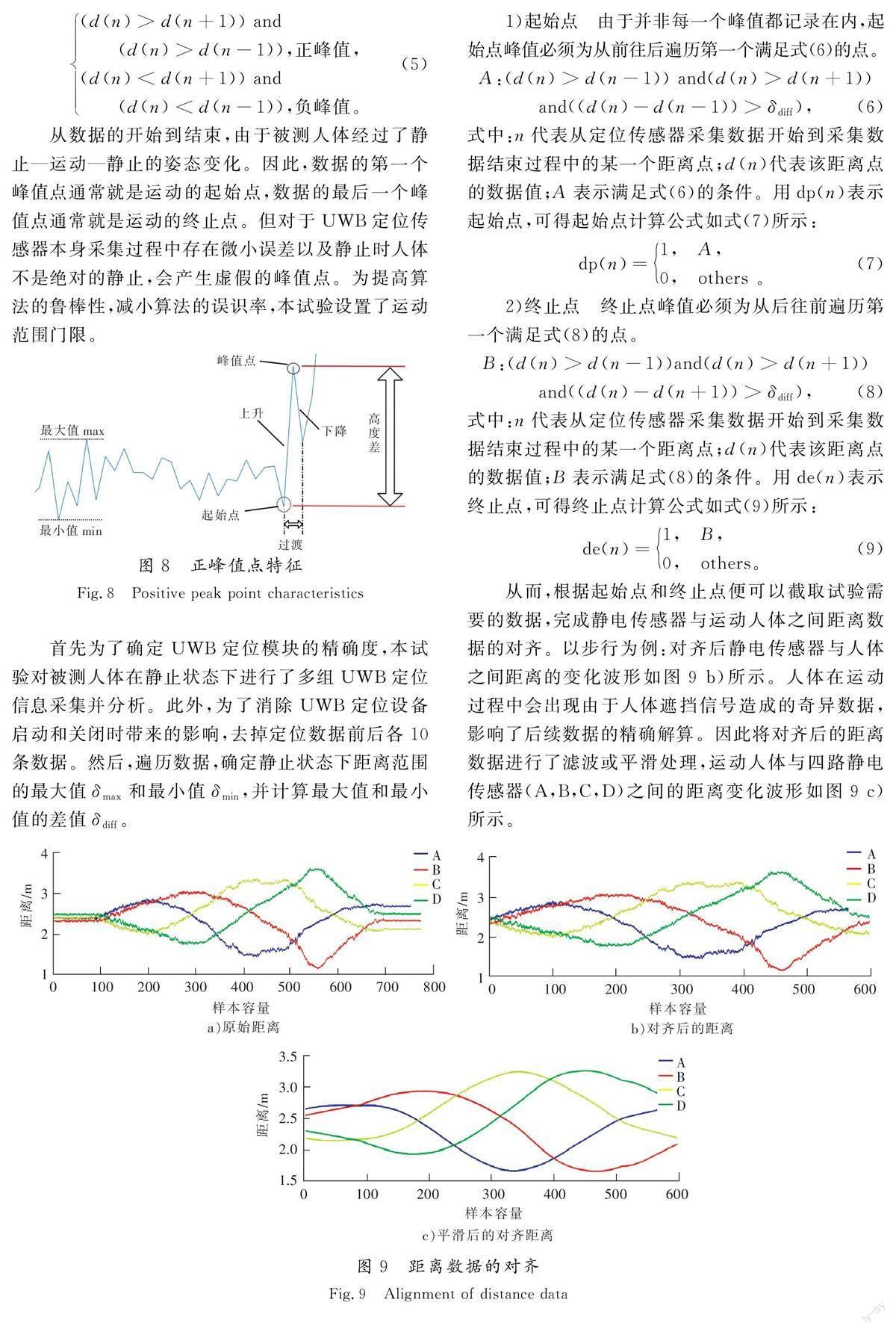
根據UWB 傳感器數據起始點和終止點的特征,一般伴隨峰值點d (n)與相鄰點d (n -1)和d(n+1)幅值之差的絕對值突然增大的現象,如圖8所示。如果第一個出現的峰值點滿足與相鄰數據點高度差超過靜止時高度差范圍,則該峰值點為起始點,如式(5)所示:
以A 路靜電傳感器信號變化、A 路靜電傳感器到人體距離、x 軸加速度為例:數據對齊后的結果對比如圖12所示。
通過對圖12所示的數據對齊結果進行分析,可以看出,上述方法得到的對齊后的數據相比于原始數據在多個方面進行了優化。
1)根據3組不同傳感器特性對采集的原始數據進行了特征分析,針對對齊所采用的具體方法進行了調整。其中,運動門限范圍選取是重要的,針對不同傳感器采集的數據,運動范圍門限選取有所不同。過大的門限會在雜波較多時放入過多突變點,過小的門限會使得正確的突變點被卡在門限外面。
2)通過計算人體運動數據的突變點,明確了有效數據的起始點和終止點,清除了數據端點不同帶來的偏差。
3)對齊過程對不同傳感器的采樣頻率也進行了調整,盡可能實現對齊操作得到的結果數據樣本容量的統一。
4)對數據進行了清洗,有效地消除了環境噪聲對靜電信號和采集數據真實性的影響,為試驗后續人體動作和人員的識別提供了更加真實可靠的數據支持。
3 結語
在數據對齊方法的基礎上,本課題組在文獻[13]中根據對齊處理后的人體靜電電位信號和人體運動距離數據進行了靜電電位補償運算,從而獲得了更加精確的人體靜電電位信號值。本課題組還將繼續優化靜電電位補償算法,通過數據擬合后的人體靜電電位信號進行人體動作、人員的識別試驗。
本研究以人體靜電電位信號數據采集試驗為例,針對運動人體的靜電電位信號、定位數據和運動加速度數據,進行了數據分析、濾波清洗和特征點提取等操作,設計實現了多傳感器數據的精確對齊。為基于人體靜電信號獲取人體姿態信息提供了有效的數據支撐,同時為多傳感器相關試驗系統中數據對齊的方法提供了范例。相比于根據數據采集時間進行對齊的方法,本文采用的方法可以有效提高多傳感器集成系統的對齊精度。然而,本文設計的方法主要針對數據起始點和終止點的提取,實現不同類型數據的對齊還有一定差距,且數據對齊過程繁瑣。未來,課題組將繼續優化數據對齊并探索新的研究方法。
猜你喜歡
艦船科學技術(2022年15期)2022-09-14 09:21:50
心理學報(2022年4期)2022-04-12 07:38:02
水泵技術(2021年3期)2021-08-14 02:09:20
電子制作(2019年15期)2019-08-27 01:12:00
電子制作(2018年19期)2018-11-14 02:37:08
自動化學報(2017年11期)2017-04-04 02:52:58
當代化工研究(2016年9期)2016-03-20 16:22:13
西華師范大學學報(自然科學版)(2015年3期)2015-02-27 15:31:22
噪聲與振動控制(2015年4期)2015-01-01 07:08:21
測繪科學與工程(2013年3期)2013-03-11 15:07:36
