應(yīng)用于潮汐車道的自適應(yīng)移動(dòng)護(hù)欄控制系統(tǒng)設(shè)計(jì)
2023-08-19 09:59:38張文琦徐發(fā)剛趙彬旭
電子設(shè)計(jì)工程 2023年16期
張文琦,徐發(fā)剛,趙彬旭
(1.南京航空航天大學(xué) 自動(dòng)化學(xué)院,江蘇 南京 211100;2.南京工程學(xué)院建筑工程學(xué)院,江蘇 南京 211100;3.南京工程學(xué)院電力工程學(xué)院,江蘇 南京 211100)
在智慧城市、智能交通的時(shí)代背景之下,提出了一種應(yīng)用于潮汐車道的自適應(yīng)移動(dòng)護(hù)欄控制系統(tǒng),該系統(tǒng)具有人工遠(yuǎn)程控制、根據(jù)車流量自適應(yīng)控制的功能。該系統(tǒng)通過磁阻傳感器檢測(cè)車流量,經(jīng)MCU 數(shù)據(jù)處理后與單片機(jī)建立通信,控制步進(jìn)電機(jī)轉(zhuǎn)動(dòng)實(shí)現(xiàn)護(hù)欄的移動(dòng)。可移動(dòng)護(hù)欄配備攝像頭檢測(cè)模塊與超聲波傳感器,當(dāng)攝像頭模塊識(shí)別到地面導(dǎo)流線后反饋給單片機(jī)信息,控制電機(jī)鎖死停轉(zhuǎn),超聲波傳感器用于緊急停止,保證車輛安全。系統(tǒng)設(shè)有無線收發(fā)模塊,用以實(shí)現(xiàn)人機(jī)通信以及雙機(jī)通信,符合未來智慧交通中無線通信的發(fā)展趨勢(shì)。
1 系統(tǒng)設(shè)計(jì)
以城市主干道中的交通十字路口為例,利用自適應(yīng)可移動(dòng)護(hù)欄實(shí)現(xiàn)潮汐車道導(dǎo)流的功能。針對(duì)早、晚高峰時(shí)段城市主干道所呈現(xiàn)出的兩側(cè)車道擁堵程度不均衡的現(xiàn)象,該測(cè)控系統(tǒng)通過對(duì)特定路段內(nèi)車流量大小進(jìn)行檢測(cè),并與對(duì)向車道檢測(cè)數(shù)據(jù)進(jìn)行比較后,根據(jù)車流量大小選擇護(hù)欄移動(dòng)的方向。
系統(tǒng)應(yīng)用場(chǎng)景如圖1 所示。考慮到大多數(shù)城市主干道均設(shè)有中心隔離帶,在對(duì)道路設(shè)施進(jìn)行微小改造的前提下,將距離路口停止線約20 m 處的隔離帶設(shè)置為可移動(dòng)護(hù)欄,以便潮汐車道的車輛導(dǎo)流[2]。設(shè)由南向北所開辟的一組導(dǎo)流護(hù)欄為護(hù)欄組Ⅰ,由北向南所開辟的另一組導(dǎo)流護(hù)欄為護(hù)欄組Ⅱ,每組護(hù)欄都設(shè)定一個(gè)基準(zhǔn)位置,即在雙向車流量較為均衡的條件下每組護(hù)欄所處位置。該系統(tǒng)車輛檢測(cè)電路由磁阻傳感檢測(cè)電路[3]組成,在道路兩端相隔約200 m 處各設(shè)置一組磁阻傳感器,得到以200 m 間距為代表的全路段車流量水平。若檢測(cè)到由南向北更為擁堵,則護(hù)欄組Ⅰ向西移動(dòng)至對(duì)向車道,道路南端子護(hù)欄引導(dǎo)車輛進(jìn)入潮汐車道,而北端子護(hù)欄提醒對(duì)向來車不可侵占該車道。
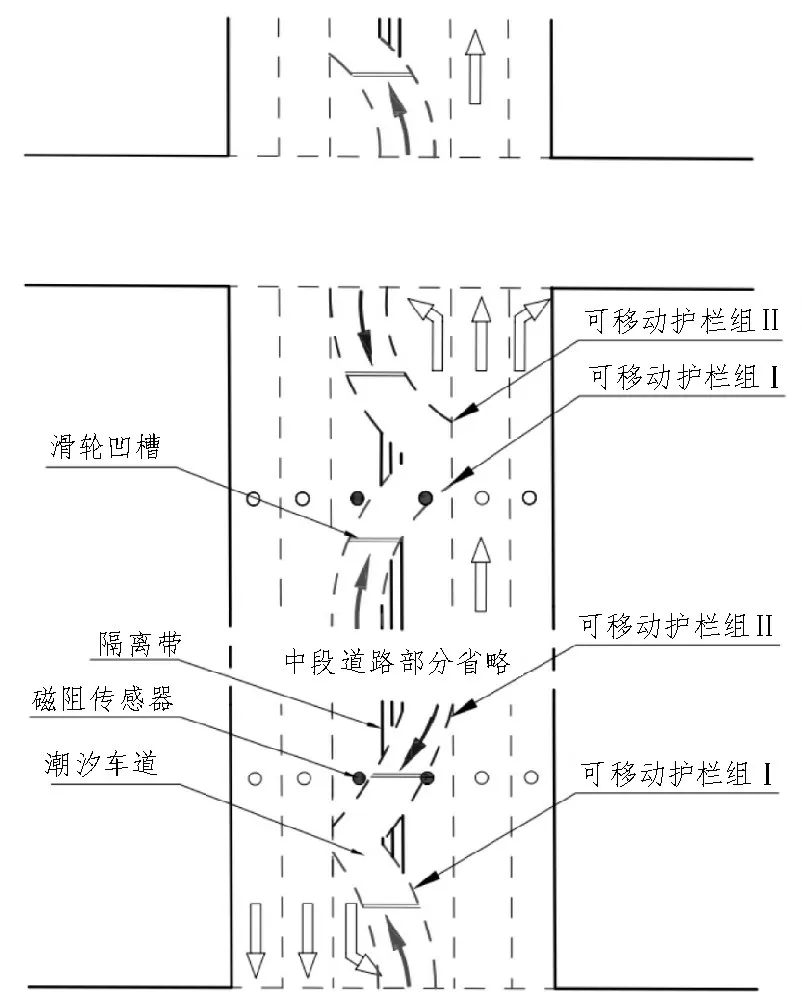
圖1 系統(tǒng)應(yīng)用場(chǎng)景圖
由于可移動(dòng)護(hù)欄設(shè)定為東西方向移動(dòng),為防止護(hù)欄縱向偏離預(yù)定軌道,需要在護(hù)欄中心位置加設(shè)一條滑輪凹槽,以確保護(hù)欄滑輪能夠沿此槽東西方向移動(dòng)。
系統(tǒng)功能設(shè)計(jì)如圖2 所示,系統(tǒng)設(shè)置有人工控制和自適應(yīng)控制模式[4]。當(dāng)?shù)缆窊矶虑矣芯o急情況發(fā)生時(shí),通過人工控制暫時(shí)開辟潮汐車道緊急通行。系統(tǒng)默認(rèn)工作在自適應(yīng)的監(jiān)測(cè)控制模式下,由磁阻傳感電路輸出計(jì)數(shù)脈沖,經(jīng)由MCU 進(jìn)行綜合處理,控制可移動(dòng)護(hù)欄組平行移動(dòng)。另外,在護(hù)欄移動(dòng)過程中,為防止出現(xiàn)護(hù)欄強(qiáng)行移動(dòng)影響交通安全的情況,增設(shè)護(hù)欄組的緊急停止功能,提高其可操作性及安全性。

圖2 系統(tǒng)功能設(shè)計(jì)框圖
2 系統(tǒng)單元配置
實(shí)現(xiàn)人工控制功能時(shí),采用PC 機(jī)無線網(wǎng)絡(luò)中繼端與MCU 以及護(hù)欄內(nèi)單片機(jī)實(shí)現(xiàn)無線通信;在自適應(yīng)控制功能下,采用磁阻傳感檢測(cè)電路完成脈沖的檢測(cè)、采集與輸出,由MCU 進(jìn)行計(jì)數(shù),并將同向路段的兩組傳感器所輸出脈沖計(jì)數(shù)循環(huán)相減,即可得到路段內(nèi)車流量的大小。MCU 根據(jù)兩向車道車流量的不均衡度(設(shè)定不均衡差值閾值為N輛車)判斷需要移動(dòng)護(hù)欄組Ⅰ或Ⅱ,通過護(hù)欄內(nèi)部的單片機(jī)系統(tǒng)控制步進(jìn)電機(jī)以實(shí)現(xiàn)移動(dòng)。為使護(hù)欄組具有自動(dòng)停止功能,需要在護(hù)欄底部安裝可識(shí)別導(dǎo)流線的攝像頭模塊,進(jìn)行圖像處理,反饋給單片機(jī),控制步進(jìn)電機(jī)停止轉(zhuǎn)動(dòng)。護(hù)欄移動(dòng)過程中,超聲波傳感器檢測(cè)周邊環(huán)境安全,并有警示燈閃爍提醒。系統(tǒng)模塊組成如圖3 所示。
對(duì)臭牡丹粗提物進(jìn)行正負(fù)兩種模式質(zhì)譜掃描,結(jié)果顯示負(fù)離子模式下響應(yīng)信號(hào)強(qiáng),分辨率高,因此選取負(fù)離子模式進(jìn)行質(zhì)譜分析,圖2為臭牡丹粗提物的總離子流圖.
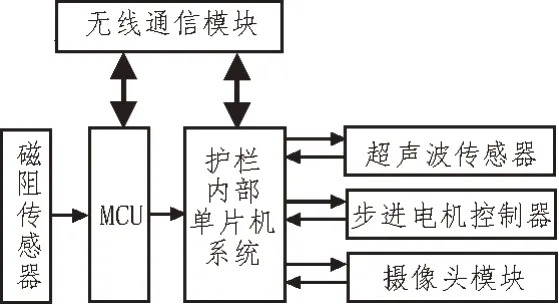
圖3 系統(tǒng)模塊組成
2.1 無線通信模塊
相較于傳統(tǒng)的總線串口通信技術(shù),人機(jī)之間采用無線通信方式[5]可減少交通路口的布線密度,增加傳輸距離,能夠適應(yīng)未來“智慧交通”智能化、無線化的趨勢(shì)。
為使控制終端PC 機(jī)能夠與護(hù)欄內(nèi)置單片機(jī)系統(tǒng)進(jìn)行遠(yuǎn)程無線通信,需要通過收發(fā)模塊RF418 實(shí)現(xiàn)兩者之間的數(shù)據(jù)異步串行無線傳輸。RF418 模塊將數(shù)據(jù)的電平信號(hào)轉(zhuǎn)換成無線電信號(hào),以一定頻率的電磁波實(shí)現(xiàn)無線通信,因其無線傳輸距離相對(duì)有限,一般可實(shí)現(xiàn)約5 km 的無線通信,此系統(tǒng)中應(yīng)在各應(yīng)用路口設(shè)置與PC 機(jī)、MCU 相配套的無線網(wǎng)絡(luò)中繼器,以將PC 機(jī)或MCU 所收發(fā)的通信信號(hào)實(shí)時(shí)發(fā)出。
如圖4 所示,PC 機(jī)通過無線中繼器與MCU WIFI 模塊[6]實(shí)現(xiàn)通信,MCU 通過RF418 與護(hù)欄內(nèi)部單片機(jī)實(shí)現(xiàn)通信;護(hù)欄內(nèi)部單片機(jī)的RXD 引腳和TXD 引腳要與RF418 的RX 引腳和TX 引腳對(duì)應(yīng)相接,達(dá)到邏輯電平一致,實(shí)現(xiàn)人機(jī)交互功能。

圖4 無線通信網(wǎng)絡(luò)
2.2 磁阻傳感器
車流量的實(shí)時(shí)監(jiān)測(cè)是實(shí)現(xiàn)可移動(dòng)護(hù)欄自適應(yīng)控制的重要環(huán)節(jié)。目前對(duì)于車流量檢測(cè)技術(shù)的探索與應(yīng)用,主要包括紅外檢測(cè)技術(shù)、電磁渦流線圈檢測(cè)技術(shù)以及視頻圖像處理技術(shù)等。現(xiàn)有的紅外檢測(cè)傳感器易受外界熱源干擾,對(duì)于車輛檢測(cè)脈沖誤差較大;渦流線圈傳感器需要埋于地下,不易安裝,且壽命短、易損耗;新興的視頻圖像處理技術(shù)易受天氣影響,尤其在霧天檢測(cè)精度大幅降低。而對(duì)于磁阻傳感器[7]而言,不需要大面積破壞路面,檢測(cè)半徑約為2 m,恰好適合各車道的車輛計(jì)數(shù),且受天氣、熱源等干擾影響極小,具有壽命長(zhǎng)、不易損壞、功耗低的優(yōu)點(diǎn),因而選用磁阻傳感器來監(jiān)測(cè)路段車流量的情況。
磁阻傳感器電路設(shè)計(jì)如圖5 所示。磁阻變化經(jīng)惠斯通電橋[8-9]調(diào)理電路轉(zhuǎn)化為差分電壓的輸出,由差動(dòng)放大電路初步綜合放大,在模擬信號(hào)進(jìn)入ADC之前利用隔離放大電路濾除不必要的干擾影響,提高共模抑制比。A/D 轉(zhuǎn)換器選用ADC0832 芯片,該轉(zhuǎn)換器具有8 位分辨率,兼容性強(qiáng)、性價(jià)比高,轉(zhuǎn)換時(shí)間僅32 μs,且具有兩個(gè)模擬輸入通道,能夠同時(shí)輸入兩個(gè)傳感器節(jié)點(diǎn)的模擬信號(hào)Ui0、Ui1。

圖5 磁阻傳感器電路設(shè)計(jì)
A/D 轉(zhuǎn)換得到數(shù)字量,因車輛經(jīng)過磁阻傳感器正上方或經(jīng)過磁阻傳感器一旁時(shí),所轉(zhuǎn)換的電壓值不同,可通過實(shí)驗(yàn)得到兩種情況下適用的電壓輸出閾值M,保證一個(gè)磁阻傳感器僅可測(cè)定一輛車,即盡量避免一輛車被兩個(gè)磁阻傳感器同時(shí)計(jì)數(shù)的情況。MCU 將輸入的數(shù)據(jù)與電壓閾值M進(jìn)行比較,若輸入值大于M,則該端傳感器電路計(jì)數(shù)加1,將前端磁阻傳感器所計(jì)數(shù)與后端磁阻傳感器所計(jì)數(shù)循環(huán)相減,即可得到車流量水平大小。最后將此差值與所設(shè)定的兩向車道車流量不均衡的判斷差值閾值N進(jìn)行比較,判斷應(yīng)對(duì)哪組步進(jìn)電機(jī)進(jìn)行控制。
2.3 護(hù)欄控制微處理器
為滿足步進(jìn)電機(jī)的存儲(chǔ)要求,與攝像頭模塊圖像存儲(chǔ)處理功能相適應(yīng),實(shí)現(xiàn)與超聲波傳感器電路的交互,多I/O 口精確控制多個(gè)步進(jìn)電機(jī)的協(xié)同運(yùn)轉(zhuǎn)或停止,并實(shí)現(xiàn)與MCU 的交互通信,護(hù)欄單片機(jī)系統(tǒng)采用MSP430FG4618 單片機(jī)[10]。該單片機(jī)配置了116 kB Flash 和8 kB RAM,具有多個(gè)晶振頻率可供選擇,相對(duì)同位數(shù)的單片機(jī)芯片成本較低,且具有多種指令,適用于數(shù)據(jù)及脈沖的計(jì)算和處理,可較好地應(yīng)用于實(shí)時(shí)控制系統(tǒng)中的外圍終端設(shè)備。
2.4 控制電機(jī)
選用單片機(jī)控制的步進(jìn)電機(jī)[10-11]為驅(qū)動(dòng)電機(jī)。實(shí)現(xiàn)多個(gè)護(hù)欄協(xié)同定向移動(dòng)時(shí),需要對(duì)多個(gè)步進(jìn)電機(jī)轉(zhuǎn)動(dòng)步數(shù)進(jìn)行協(xié)同控制,并在緊急停止時(shí)可同時(shí)實(shí)現(xiàn)停止轉(zhuǎn)動(dòng)。
在步進(jìn)電機(jī)工作時(shí),需要步進(jìn)電機(jī)驅(qū)動(dòng)器的配合,將其所接收到的控制電平與方向信號(hào)綜合,結(jié)合自身邏輯電路,確定繞組時(shí)序方向。不同的通電方向可以實(shí)現(xiàn)步進(jìn)電機(jī)的正、反轉(zhuǎn)。為使各段護(hù)欄能夠協(xié)同前進(jìn),需要單片機(jī)對(duì)不同電機(jī)實(shí)時(shí)輸出總線控制信號(hào)。通過MCU 或PC 機(jī)與護(hù)欄單片機(jī)系統(tǒng)間的無線數(shù)據(jù)傳輸,實(shí)現(xiàn)自適應(yīng)模式和人工控制模式的切換。
在MSP430FG4618 單片機(jī)控制步進(jìn)電機(jī)的程序編寫中,需要使之產(chǎn)生特定頻率的脈沖信號(hào),并使用定時(shí)器設(shè)置中斷反應(yīng),以控制、檢測(cè)步進(jìn)電機(jī)前進(jìn)的步數(shù)。因步數(shù)控制誤差較大,所以當(dāng)單片機(jī)判斷出攝像頭模塊已檢測(cè)到路面導(dǎo)流線邊緣時(shí),隨即控制步進(jìn)電機(jī)鎖死停轉(zhuǎn),步數(shù)計(jì)數(shù)清零,即到達(dá)潮汐車道引流護(hù)欄設(shè)定位置。
2.5 攝像頭模塊
通過控制步進(jìn)電機(jī)前進(jìn)步數(shù)來控制護(hù)欄移動(dòng)的方法有較大的誤差,因而需要在護(hù)欄的下方加裝攝像頭模塊,當(dāng)攝像頭模塊檢測(cè)[12]到地面導(dǎo)流線邊緣時(shí),護(hù)欄停止移動(dòng)。對(duì)于夜間等光線較暗的時(shí)段,要求攝像頭具有感受光強(qiáng)及LED 補(bǔ)光的功能。該功能的實(shí)現(xiàn)需要用到光線傳感器模塊,由單片機(jī)控制LED 燈終端的開啟狀態(tài)。
攝像頭模塊需要對(duì)圖像中的導(dǎo)流線邊緣進(jìn)行檢測(cè),因?qū)Я骶€邊緣可近似視為直線,選用Hough 變換法[13]對(duì)圖1 中護(hù)欄組下方導(dǎo)流線進(jìn)行檢測(cè),可以取得較好的檢測(cè)效果。因路面并非光滑平面,圖像中存在較多噪聲點(diǎn),在進(jìn)行Hough 變換之前,需要使用中值濾波濾除高頻椒鹽噪聲。
Hough 變換的基本思想是利用兩空間的對(duì)偶關(guān)系,將待識(shí)別直線由圖像空間變換到參數(shù)空間,即將求直線問題轉(zhuǎn)化為求點(diǎn)問題。設(shè)圖像空間中的邊緣線方程為:
Hough 變換將圖像空間中的任意一點(diǎn)(xi,yi)映射到參數(shù)空間(a,b)中的一條直線上,并經(jīng)過一點(diǎn)(a0,b0),則參數(shù)空間中一點(diǎn)(a0,b0)唯一對(duì)應(yīng)圖像空間中由式(2)表示的一條直線:
利用Hough 變換檢測(cè)出邊緣線典型方程,通過參數(shù)空間點(diǎn)坐標(biāo)的測(cè)算即可獲取導(dǎo)流線與護(hù)欄的相對(duì)位置。當(dāng)系統(tǒng)在參數(shù)空間檢測(cè)到相應(yīng)的坐標(biāo)值時(shí),即判斷到達(dá)導(dǎo)流線,護(hù)欄定位成功,并由單片機(jī)向步進(jìn)電機(jī)驅(qū)動(dòng)器發(fā)出控制指令。
2.6 超聲波傳感器
與MSP430FG4618 單片機(jī)相連的超聲波傳感器電路[14]具有感知車輛靠近的功能。當(dāng)護(hù)欄在移動(dòng)過程中有車輛經(jīng)過且距離護(hù)欄較近時(shí),超聲波傳感器電路向單片機(jī)發(fā)出高電平信號(hào),由單片機(jī)控制步進(jìn)電機(jī)作出緊急停止的動(dòng)作,待計(jì)時(shí)結(jié)束車輛駛離后,控制步進(jìn)電機(jī)繼續(xù)運(yùn)轉(zhuǎn)。
3 系統(tǒng)控制方法
將該方法應(yīng)用于潮汐車道的可移動(dòng)護(hù)欄控制系統(tǒng),首先根據(jù)MCU 檢測(cè)和處理上位機(jī)所發(fā)出的外部指令,選擇進(jìn)入人工控制模式、自適應(yīng)智能控制模式或強(qiáng)制關(guān)機(jī)、緊急避險(xiǎn)模式。
系統(tǒng)控制方法設(shè)計(jì)如圖6 所示。在人工控制模式下,MCU 根據(jù)外部指令,選擇護(hù)欄的定時(shí)移動(dòng)或是緊急狀態(tài)下的人工實(shí)時(shí)控制。在自適應(yīng)控制模式下,MCU 對(duì)磁阻傳感器電路所發(fā)出的計(jì)數(shù)脈沖信號(hào)進(jìn)行統(tǒng)計(jì),得到某路段兩方向車道的實(shí)時(shí)車流量大小。設(shè)該路段由南向北車流量計(jì)數(shù)為TN,由北向南車流量計(jì)數(shù)為TS,當(dāng)TN>TS或TS>TN時(shí),MCU 與護(hù)欄內(nèi)MSP430FG4618 單片機(jī)進(jìn)行雙機(jī)通信,啟動(dòng)對(duì)護(hù)欄組Ⅰ或護(hù)欄組Ⅱ的控制。

圖6 系統(tǒng)控制方法設(shè)計(jì)流程圖
單片機(jī)得到啟動(dòng)指令后,通電并控制步進(jìn)電機(jī)驅(qū)動(dòng)器使護(hù)欄沿滑輪凹槽向特定方向移動(dòng)。在護(hù)欄移動(dòng)過程中,由超聲波傳感器檢測(cè)是否有對(duì)向車輛侵入該潮汐車道,若有,則實(shí)施緊急停止,避讓來車,并延時(shí)10 s,繼續(xù)控制步進(jìn)電機(jī)轉(zhuǎn)動(dòng);攝像頭模塊將路面圖像實(shí)時(shí)存儲(chǔ)到單片機(jī)存儲(chǔ)器中,經(jīng)圖像處理判斷某時(shí)刻護(hù)欄是否到達(dá)設(shè)定位置,若檢測(cè)到邊緣線,則單片機(jī)控制步進(jìn)電機(jī)鎖死停轉(zhuǎn)。
可移動(dòng)護(hù)欄的每種位置狀態(tài)由護(hù)欄內(nèi)部的MSP430FG4618 單片機(jī)無線傳輸給MCU 進(jìn)行中繼匯總并傳輸給PC 機(jī)控制終端,以便及時(shí)人工調(diào)度和調(diào)整。當(dāng)護(hù)欄移動(dòng)動(dòng)作完成后,磁阻傳感器仍繼續(xù)監(jiān)測(cè)車流量,但由于潮汐車道借用了一個(gè)對(duì)向車道,即此車道上的兩個(gè)磁阻傳感器檢測(cè)到的車流量屬于與潮汐車道設(shè)定方向同向道路的車流量,需要對(duì)MCU設(shè)置計(jì)數(shù)分離功能。計(jì)數(shù)分離是指當(dāng)MCU 接收到單片機(jī)所發(fā)出的護(hù)欄位置信息時(shí),及時(shí)調(diào)整傳感器的計(jì)數(shù)方法,將潮汐車道中的計(jì)數(shù)值并入與之同向車道的計(jì)數(shù)值中,而后程序不變。
4 仿真分析
4.1 磁阻傳感器信號(hào)放大電路仿真分析
為模擬車輛經(jīng)過時(shí)磁阻傳感器信號(hào)放大電路的輸出電壓,可以通過改變圖5 中單臂電橋上Rd阻值來模擬磁阻傳感器感應(yīng)到磁場(chǎng)時(shí)的輸出[8]。設(shè)置合適的Rd阻值,運(yùn)用Multisim 進(jìn)行仿真,把示波器兩輸入端分別接入電橋輸出,將另一輸入通道連接隔離放大器輸出端,仿真結(jié)果如圖7 所示。
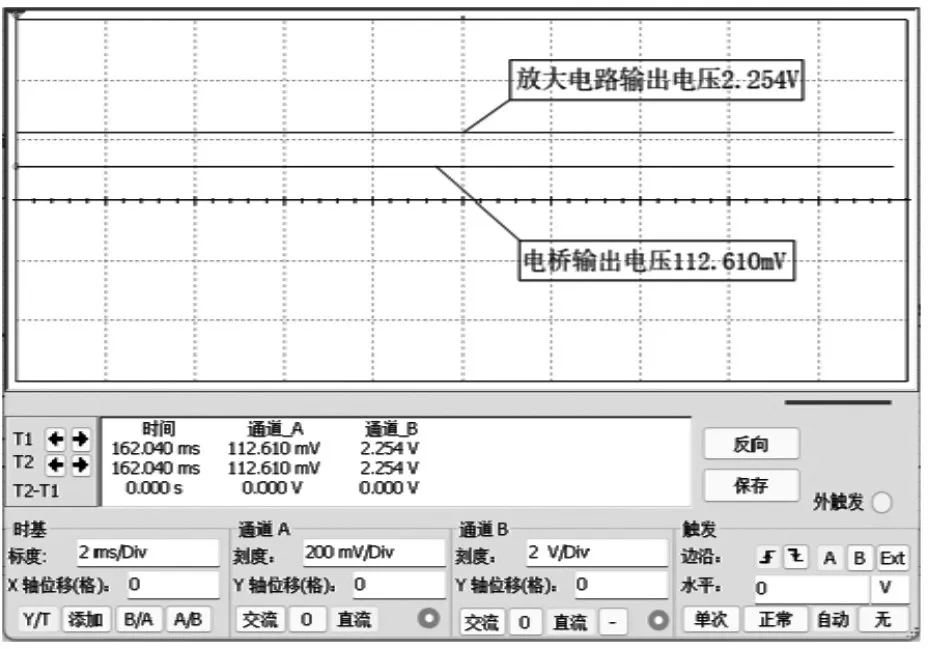
圖7 仿真結(jié)果
由仿真結(jié)果可以得到輸出電壓增益Kf≈20,輸出電壓始終處于1~4 V 之間,符合ADC0832 的輸入要求。
4.2 邊緣線檢測(cè)
護(hù)欄發(fā)出停止指令前,采集到原始圖像,將其轉(zhuǎn)換為灰度圖后,需要中值濾波才能將路面的輸入噪聲去除。選擇50×50 的像素區(qū)域作滑動(dòng)窗口,得到中值濾波后的圖像,如圖8 所示。
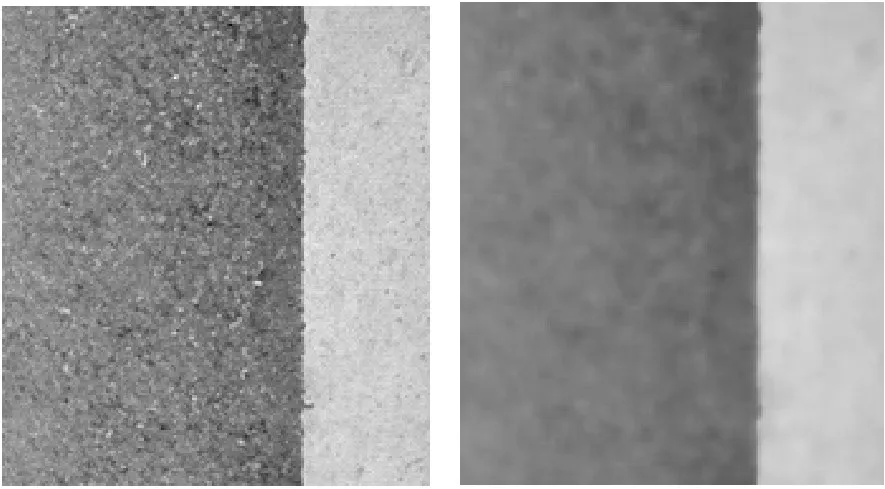
圖8 原圖及濾波后圖像
Canny 邊緣檢測(cè)算子[15-16]的輸出效果好,失誤率低,采用高斯濾波器對(duì)噪聲進(jìn)一步平滑處理,提取出邊緣線。通過對(duì)Canny 邊緣檢測(cè)輸出圖片進(jìn)行Hough 變換,得到已標(biāo)記出直線段的變換圖像。
經(jīng)實(shí)驗(yàn)仿真,系統(tǒng)由攝像頭模塊采集的數(shù)字圖像,使用中值濾波去除其尖脈沖干擾及椒鹽噪聲,經(jīng)Canny 算子邊緣檢測(cè)后,使用Hough 變換能夠準(zhǔn)確地檢測(cè)出邊緣線,由此可以準(zhǔn)確控制護(hù)欄運(yùn)動(dòng)狀態(tài)。

圖9 Canny 邊緣檢測(cè)及Hough 變換圖像
5 結(jié)束語
該自適應(yīng)系統(tǒng)采用磁阻傳感器實(shí)時(shí)監(jiān)測(cè)車流量,根據(jù)道路兩側(cè)車流量的不均衡程度判控制護(hù)欄組Ⅰ或Ⅱ的移動(dòng),并運(yùn)用數(shù)字圖像處理技術(shù)檢測(cè)導(dǎo)流線邊緣,實(shí)現(xiàn)移動(dòng)護(hù)欄的自動(dòng)停止。另外,系統(tǒng)設(shè)置超聲波探測(cè)器用作保護(hù)機(jī)制,采用人機(jī)無線通信以及雙機(jī)無線通信,能夠適用于未來車聯(lián)網(wǎng)的功能拓展,符合智慧交通無線、智能控制的趨勢(shì)。自適應(yīng)可移動(dòng)護(hù)欄應(yīng)用于潮汐車道,具有無線化、智能化的顯著優(yōu)勢(shì),能夠緩解高峰時(shí)段所導(dǎo)致的單向車道擁堵的狀況,有利于促進(jìn)節(jié)能減排,構(gòu)建綠色、智能的交通系統(tǒng)。
猜你喜歡
中學(xué)生數(shù)理化·七年級(jí)數(shù)學(xué)人教版(2021年6期)2021-11-22 07:50:58
中學(xué)生數(shù)理化·七年級(jí)數(shù)學(xué)人教版(2021年6期)2021-11-22 07:50:58
中學(xué)生數(shù)理化·七年級(jí)數(shù)學(xué)人教版(2021年6期)2021-11-22 07:50:58
中學(xué)生數(shù)理化·七年級(jí)數(shù)學(xué)人教版(2020年12期)2021-01-18 06:57:46
中學(xué)生數(shù)理化·七年級(jí)數(shù)學(xué)人教版(2020年12期)2021-01-18 06:57:46
電子制作(2019年13期)2020-01-14 03:15:28
電子制作(2019年15期)2019-08-27 01:12:10
電子制作(2019年9期)2019-05-30 09:42:02
電子制作(2018年12期)2018-08-01 00:48:04
電子制作(2017年19期)2017-02-02 07:08:27

- 電子設(shè)計(jì)工程的其它文章
- 基于BN 算法的電力調(diào)度多源故障數(shù)據(jù)融合研究
- 基于分層聚合的電力系統(tǒng)不良數(shù)據(jù)自動(dòng)辨識(shí)
- 基于BIRCH 算法的配電網(wǎng)設(shè)備多源數(shù)據(jù)融合存儲(chǔ)技術(shù)研究
- 基于信息熵更新權(quán)重的數(shù)據(jù)自適應(yīng)聚類研究
- 基于負(fù)荷組合預(yù)測(cè)的配電網(wǎng)網(wǎng)架動(dòng)態(tài)變化識(shí)別方法
- 考慮負(fù)荷特性的電力系統(tǒng)低頻減載系統(tǒng)設(shè)計(jì)