輸電線路縱聯(lián)電流差動保護(hù)仿真設(shè)計
2023-08-21 02:03:40張靜靜張克輝杜明軒李若舟劉思雨李霜霜
河北建筑工程學(xué)院學(xué)報 2023年2期
王 磊 張靜靜* 張克輝 杜明軒 李若舟 劉思雨 李霜霜
(1.河北建筑工程學(xué)院,河北 張家口 075000;2.河北華電石家莊鹿華熱電有限公司,石家莊 050200)
0 前 言
繼電保護(hù)技術(shù)和繼電保護(hù)裝置組成的系統(tǒng)一起構(gòu)成了電力系統(tǒng)繼電保護(hù).電力系統(tǒng)繼電保護(hù)在保障電力系統(tǒng)安全穩(wěn)定和經(jīng)濟(jì)運(yùn)行等方面有著及其重要的作用,因此,它是電力系統(tǒng)的重要組成部分[1].目前,大規(guī)模聯(lián)合電力系統(tǒng)越來越普遍,現(xiàn)代大電網(wǎng)的結(jié)構(gòu)和運(yùn)行方式也趨于多樣化,正因如此,繼電保護(hù)的要求必須越來越高才能保證系統(tǒng)運(yùn)行的安全性和可靠性[2].因此,靈敏度高、可靠性好的電流差動保護(hù)得到了廣泛的研究[3].
本文在研究輸電線路縱聯(lián)電流差動保護(hù)基本原理的基礎(chǔ)上,在Matlab的Simulink仿真平臺建立一次系統(tǒng)模型和保護(hù)模型,利用Matlab的圖形用戶界面GUI設(shè)計了仿真界面,通過界面輸入?yún)?shù),仿真波形可以很直觀地顯示在界面上,使驗證保護(hù)的動作特性更方便、快捷.
1 縱聯(lián)電流差動保護(hù)概述
1.1 縱聯(lián)電流差動保護(hù)的原理
輸電線路縱聯(lián)保護(hù)裝置,能夠?qū)⒕€路一側(cè)的電氣量傳輸?shù)搅硪粋?cè)去,使得線路兩側(cè)之間建立縱向的聯(lián)系[4].
電流縱聯(lián)差動保護(hù)示意圖如圖1所示,流過差動繼電器的電流時電流互感器二次側(cè)電流的和,由于兩個電流互感器總有勵磁電流的存在,并且勵磁特性不會完全的一樣,所以正常運(yùn)行或是區(qū)外故障時,流過差動繼電器的電流并不會為零,我們稱這一電流為不平衡電流.若考慮勵磁電流的影響,二次側(cè)電流的數(shù)值為:

圖1 電流縱聯(lián)差動保護(hù)示意圖
(1)

(2)
繼電器正確動作時,差動電流Ir應(yīng)躲過正常運(yùn)行或是區(qū)外故障時的不平衡電流,也就是:
(3)
在工程應(yīng)用中,不平衡電流的穩(wěn)態(tài)值要采用互感器的10%的誤差按式(4)計算:
Iunb=0.1KstKnpIk
(4)
式中:Kst──電流互感器的同型系數(shù),若兩側(cè)的互感器型號和容量都相同時取0.5,不同則取1;Knp──非周期分量系數(shù);Ik──區(qū)外故障時兩個電流互感器的電流.

1.2 輸電線路縱聯(lián)電流差動保護(hù)的特性分析
輸電線路縱聯(lián)電流差動保護(hù)有不帶制動作用和帶有制動作用的兩種動作判據(jù),如果縱差保護(hù)滿足靈敏度要求,一般采用不帶制動作用的縱差保護(hù),如果縱差保護(hù)不滿足靈敏度要求或者對靈敏度有更高的要求時,通常要采用的縱差保護(hù)要帶有制動特性.兩種動作判據(jù)的簡要分析如下:
(1)不帶制動特性的差動繼電器特性
這種差動繼電器的動作方程為:
(5)
式中:Ir──差動繼電器中流過的電流;
Iset──差動保護(hù)的動作電流整定值,其值通常按躲過外部短路時的最大不平衡電流和躲過最大負(fù)荷電流兩個條件來選取.取按這兩個條件選取的整定值中較大的一個作為差動繼電器的整定值.
(2)帶制動作用的差動繼電器動作特性

(6)
式中:K──制動系數(shù),可在0-1之間選擇;
Iop0──克服繼電器動作時出現(xiàn)的機(jī)械摩擦或保證電路狀態(tài)發(fā)生翻轉(zhuǎn)需要的一個很小的門限值,遠(yuǎn)小于無制動作用時的Iset.
這種動作電流隨制動電流變化的特性被稱為制動特性.它既提高了內(nèi)部故障時的靈敏度,又提高了外部故障時不動作的可靠性,因而在電流差動保護(hù)中得到了非常大的應(yīng)用.
2 縱聯(lián)電流差動保護(hù)仿真
2.1 建立雙電源輸電線路系統(tǒng)模型
利用Matlab/Simulink搭建的雙電源單回線仿真模型如圖2所示.

圖2 輸電線路縱聯(lián)電流差動保護(hù)的主系統(tǒng)
2.2 輸電線路縱聯(lián)電流差動保護(hù)仿真系統(tǒng)的構(gòu)成
提取線路仿真部分的結(jié)果,對其進(jìn)行一定的整理、分析、運(yùn)算便可以實現(xiàn)動作行為的仿真.根據(jù)M側(cè)電流(圖2左側(cè)電源電流)在發(fā)生各類故障都會產(chǎn)生變化的特性,可以設(shè)計出故障啟動元件和選相元件;根據(jù)M側(cè)和N側(cè)電流(圖2右側(cè)電源電流)在不同故障時電流向量和不同的特性,可以設(shè)計出差動保護(hù)元件.這些元件按照一定的工作順序進(jìn)行工作便可以構(gòu)成最終的差動保護(hù)動作行為的仿真.如圖3所示,給出了輸電線路縱聯(lián)電流差動保護(hù)仿真系統(tǒng)的邏輯框圖.需要指出的是,此處運(yùn)用啟動元件與差動繼電器的共同作用來實現(xiàn)差動保護(hù),可以使保護(hù)更加的安全可靠,防止了保護(hù)的誤動作.

圖3 輸電線路縱聯(lián)電流差動保護(hù)仿真系統(tǒng)的邏輯框圖
這些元件的工作順序為:由雙電源輸電線路一次系統(tǒng)模型模擬故障,提取故障后的雙端三相電流;線路M側(cè)的三相電流送至啟動元件內(nèi),啟動元件會對其進(jìn)行計算,如果計算結(jié)果滿足啟動條件,則為發(fā)生故障,啟動元件會輸出啟動信號,允許差動繼電器動作;線路M側(cè)的三相電流送至選相元件內(nèi),選相元件對其進(jìn)行計算和判斷,選相元件會判斷出滿足什么相故障,并作出相應(yīng)的選相結(jié)果;M側(cè)和N側(cè)的電流同時送至差動繼電器,差動繼電器對其進(jìn)行計算和判斷,若符合差動繼電器的動作的條件,結(jié)合啟動元件的啟動信號,差動繼電器輸出動作信號,若不符合差動繼電器的動作條件,即使有啟動信號,差動繼電器也不會輸出動作信號.
2.3 啟動元件
啟動元件有很多種,例如:電流元件、阻抗元件、負(fù)序和零序電流元件、相電流差突變量元件等.相電流差突變量元件在保護(hù)中更加可靠,所以在此采用相電流差突變量元件作為啟動元件.
相電流差突變量元件的判據(jù)為:
(7)
式(7)所列出的啟動判據(jù)在實際中會由于頻率的波動而產(chǎn)生誤動現(xiàn)象,所以在實際運(yùn)用中需要對式(7)進(jìn)行一定的完善,即:
(8)




2.4 故障選相元件
目前,穩(wěn)態(tài)量選相與突變量選相兩者相結(jié)合的選相方式已經(jīng)證明了具有很大的優(yōu)勢,所以高壓線路的故障選相大多選擇這種方法[5].如圖4給出了故障選相元件原理流程圖.

圖4 故障選相元件原理流程圖
2.5 差動繼電器
電流差動保護(hù)的分析方法很多,可歸并為兩類:一類通常被稱為制動特性分析法,它需要測量出差動電流ID和制動電流IR,并對差動電流和制動電流進(jìn)行適當(dāng)?shù)谋容^和分析;另一類是以動作條件下兩端電流IM和IN的相互關(guān)系表示,在這一類中廣泛應(yīng)用的有幅值特性分析法和相位特性分析法.制動特性分析法有一定的優(yōu)點,就是能夠直接看出差動保護(hù)動作值的變化規(guī)律以及靈敏度裕度,但它也有很大的缺點,就是被保護(hù)元件兩端電流的關(guān)系不能在差動保護(hù)動作條件下直接給出.但是,后一類則彌補(bǔ)了這一缺陷[19].所以我們采用式(6)作為搭建差動繼電器的判斷方程,根據(jù)仿真的需要,K取值為0.7,Iop0取值為1.5,以A相為例搭建的繼電器模型如圖5所示.差動繼電器的最終模塊如圖5所示,其中加入一個與門,通過它與啟動元件部分相連.差動繼電器與啟動元件共同作用可以保障差動繼電器的可靠工作,有效的防止了差動繼電器的誤動作.

(a)A相繼電器模型

(b)差動繼電器最終模型圖5 差動繼電器部分模型圖
2.6 人機(jī)交互界面
利用Matlab軟件可以建立人機(jī)交互界面,如圖6所示.通過人機(jī)交互界面可以進(jìn)行主系統(tǒng)參數(shù)的設(shè)置和修改以及故障的設(shè)定等,方便了仿真系統(tǒng)的參數(shù)設(shè)定和結(jié)果演示.

圖6 人機(jī)交互界面
3 仿真結(jié)果與分析
以區(qū)內(nèi)A相接地短路故障為例進(jìn)行仿真.在故障類型出選擇區(qū)內(nèi)A相接地短路,并輸入適當(dāng)?shù)膮?shù),單擊開始仿真進(jìn)行仿真,會彈出仿真結(jié)果.
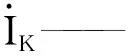
圖7所示為動作情況,從上至下依次是M側(cè)電流、N側(cè)電流、啟動信號、差動繼電器信號.可以看到發(fā)生區(qū)內(nèi)單相接地故障時,M、N兩側(cè)故障相電流增大,非故障相電流不變;啟動信號和差動繼電器均跳變,輸出保護(hù)的動作信號.
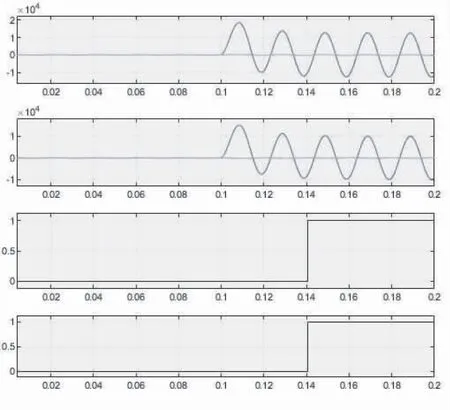
圖7 人機(jī)交互界面動作情況運(yùn)行結(jié)果
如圖8所示是故障選相結(jié)果,由上至下分別為A相接地、B相接地、C相接地、AB短路、BC短路、CA短路,可以看出A相接地故障器發(fā)生跳變,其余故障器均不動作,則類型選相結(jié)果為A相接地故障.
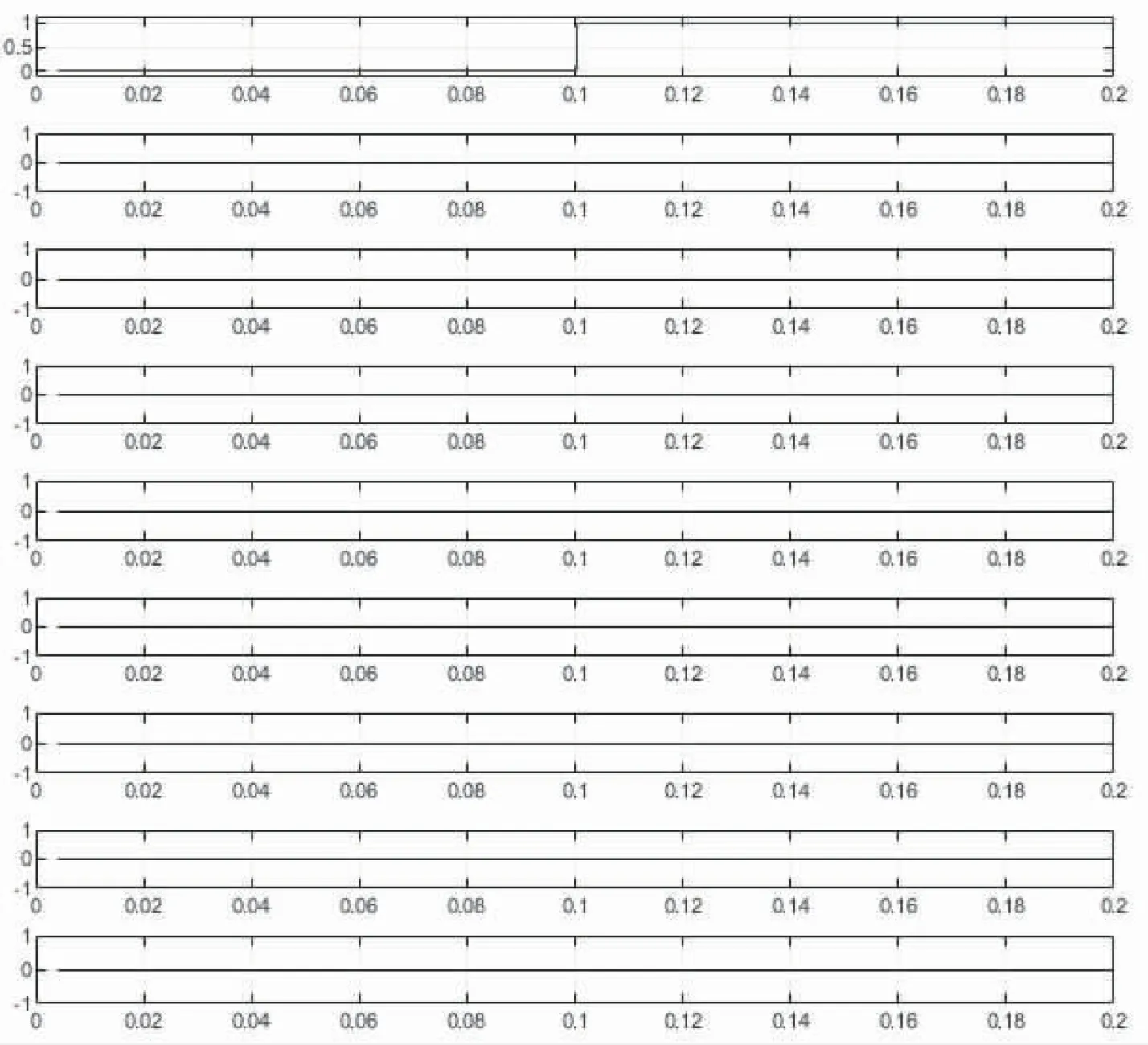
圖8 人機(jī)交互界面選相結(jié)果
從結(jié)果來看,人機(jī)交互界面可以正常運(yùn)行并仿真得到結(jié)果.通過人機(jī)交互界面還可以改變相應(yīng)的參數(shù)并進(jìn)行不同故障的仿真.
4 總 結(jié)
本文在Matlab的Simulink仿真平臺上建立縱聯(lián)電流差動保護(hù)仿真模型,利用Matab的GUI設(shè)計了人機(jī)交互界面,通過人機(jī)交互界面設(shè)置參數(shù)進(jìn)行仿真,仿真結(jié)果表明區(qū)內(nèi)故障保護(hù)可以正確動作,驗證了縱聯(lián)電流差動保護(hù)的動作特性,并且有利于課堂教學(xué)演示和后續(xù)的科研研發(fā).
猜你喜歡
當(dāng)代陜西(2020年13期)2020-08-24 08:22:02
汽車維修與保養(yǎng)(2019年7期)2020-01-06 03:30:42
小學(xué)生作文(低年級適用)(2018年3期)2018-04-17 00:58:35
制造技術(shù)與機(jī)床(2017年5期)2018-01-19 02:49:17
少年博覽·小學(xué)低年級(2017年4期)2017-06-09 16:22:28
作文評點報·低幼版(2017年7期)2017-03-11 20:49:41
濰坊學(xué)院學(xué)報(2016年2期)2016-12-01 13:00:11
汽車維護(hù)與修理(2016年10期)2016-07-10 08:17:41
新聞傳播(2015年11期)2015-07-18 11:15:04
少兒科學(xué)周刊·少年版(2015年4期)2015-07-07 20:56:37