空間多體繩系編隊動力學與控制研究綜述
2023-08-22 04:49:20王長青孫佩杰李愛軍
宇航學報 2023年7期
王長青,楊 航,孫佩杰,李愛軍
(西北工業大學自動化學院,西安 710072)
0 引 言
空間多體繩系編隊是由空間雙體繩系系統演變而來,通常由多個衛星或航天器通過特殊材質系繩連接組成的某種特定構形的編隊系統[1-3],如圖1所示。空間多體繩系編隊系統在進入預定空間軌道后,會根據任務要求展開形成相應的編隊構型,在編隊系統中,一些大型航天器可由多個結構簡單的衛星代替,衛星之間可以通過通信來進行信息共享。此外,空間多體繩系編隊系統還可以根據任務需求及變化,通過改變系繩長度等方式完成編隊構型重組,以實現不同類別任務的目標。相比于無繩系編隊系統,多體繩系編隊系統的主要優勢一方面在于這種系統可通過調整系繩張力來保持或改變隊形,而傳統的編隊系統在隊形控制過程中需要依靠推進器產生推力,會消耗大量燃料;另一方面繩系編隊衛星系統可獲得較長的測量基線,并通過收放系繩來改變測量基線。相對于傳統的自由編隊方式,空間多體繩系編隊系統的研究雖然起步較晚,但其巨大的應用前景已經得到學術界以及工程界的廣泛認可,被認為在空間目標捕獲[4]、在軌服務[5-6]、空間干涉儀[7]、電子監視等[8]多方面具有很高的應用潛力和價值。例如近些年來世界各國開展的大量在軌繩系衛星試驗,包括NASA的SEDS系列、俄羅斯和歐洲聯合進行的YES2空間試驗以及美國ISAS與日本JAXA合作開展的T-REX等太空試驗[9-11],均驗證了空間繩系系統太空任務的可行性和應用前景。

圖1 空間多體繩系編隊系統
空間多體繩系編隊運行于特殊的太空環境,不僅構形種類繁多,還存在較為復雜的動力學特性,因此需要對編隊構型、動力學模型、編隊構型形成、編隊構型穩定保持以及星體姿態機動等方面展開研究。本文介紹了常見的繩系編隊構型及其特點,對常見的繩系系統動力學模型進行了總結;梳理了繩系編隊任務全流程控制研究現狀,包括繩系編隊構型形成控制、構型穩定保持研究以及剛體姿態機動控制;分析總結了現有的地面試驗裝置及方法,展望了未來的發展趨勢。
1 空間多體繩系編隊構型及動力學模型
1.1 繩系編隊構型
空間多體繩系編隊系統因航天器個數的不同而存在多種構型組成方式,在進入到預定空間軌道之后,多體繩系編隊系統會根據不同的空間任務要求產生不同的構型。繩系編隊的構型一般按照末端體在空間的分布形式或編隊穩定飛行方式進行分類。按照空間分布形式可分為三大類:一維構型、二維構型和三維構型。其中一維構型即衛星均位于一條直線上,屬于此類構型的繩系編隊系統稱為直鏈式構型[12-13],如圖2所示;二維構型即在空間中衛星位于同一平面內,常見的此類構型有閉環三角形構型[14]、開環-輪輻式構型[15]、閉環-輪輻構型[16]以及TetraStar構型[17]等,如圖3所示;三維構型即系統中的衛星處于不同平面的構型,研究較多的此類構型包括四面體構型[18]、雙四面體構型[19]、金字塔構型[20]以及雙金字塔構型[21]等,如圖4所示。
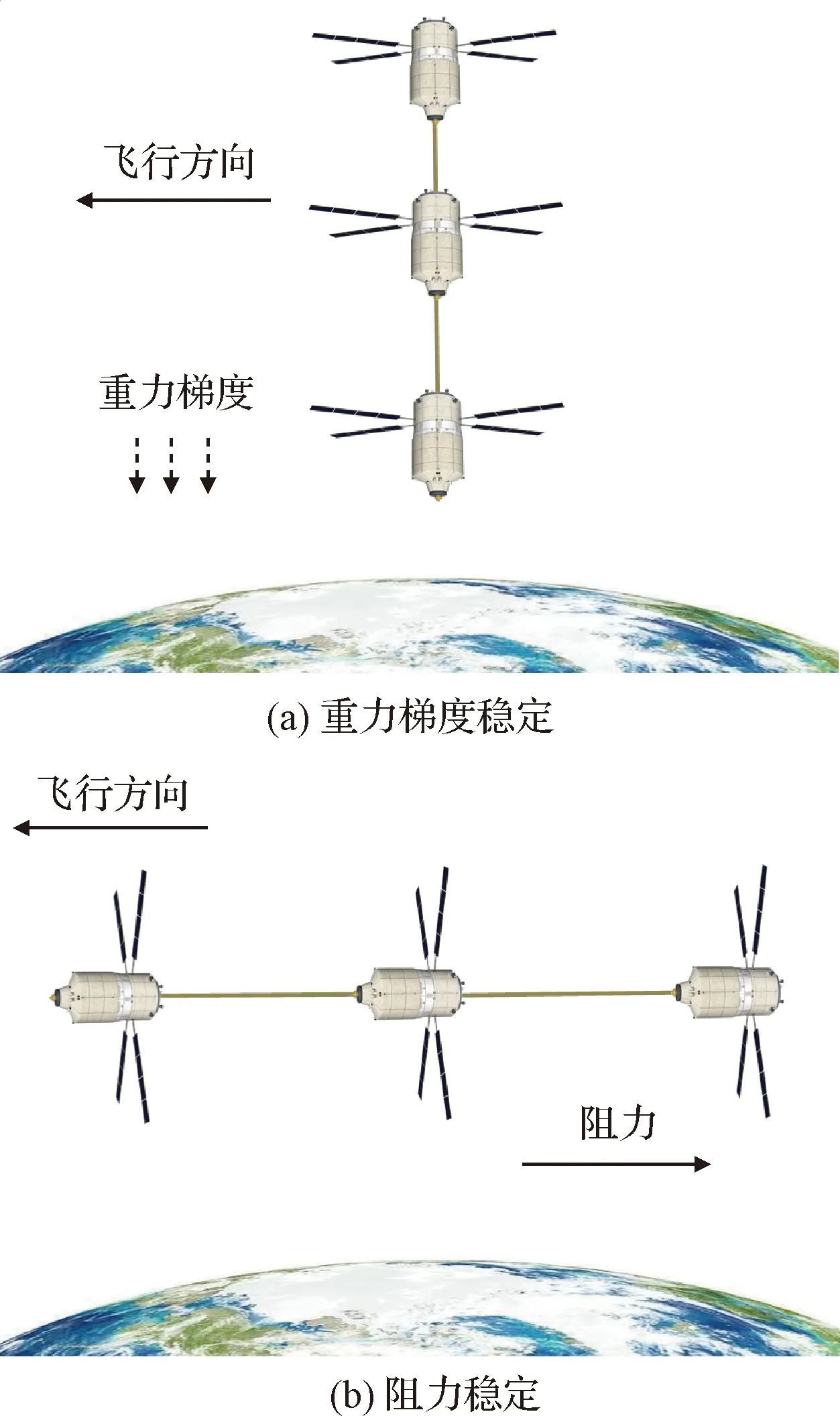
圖2 一維構型
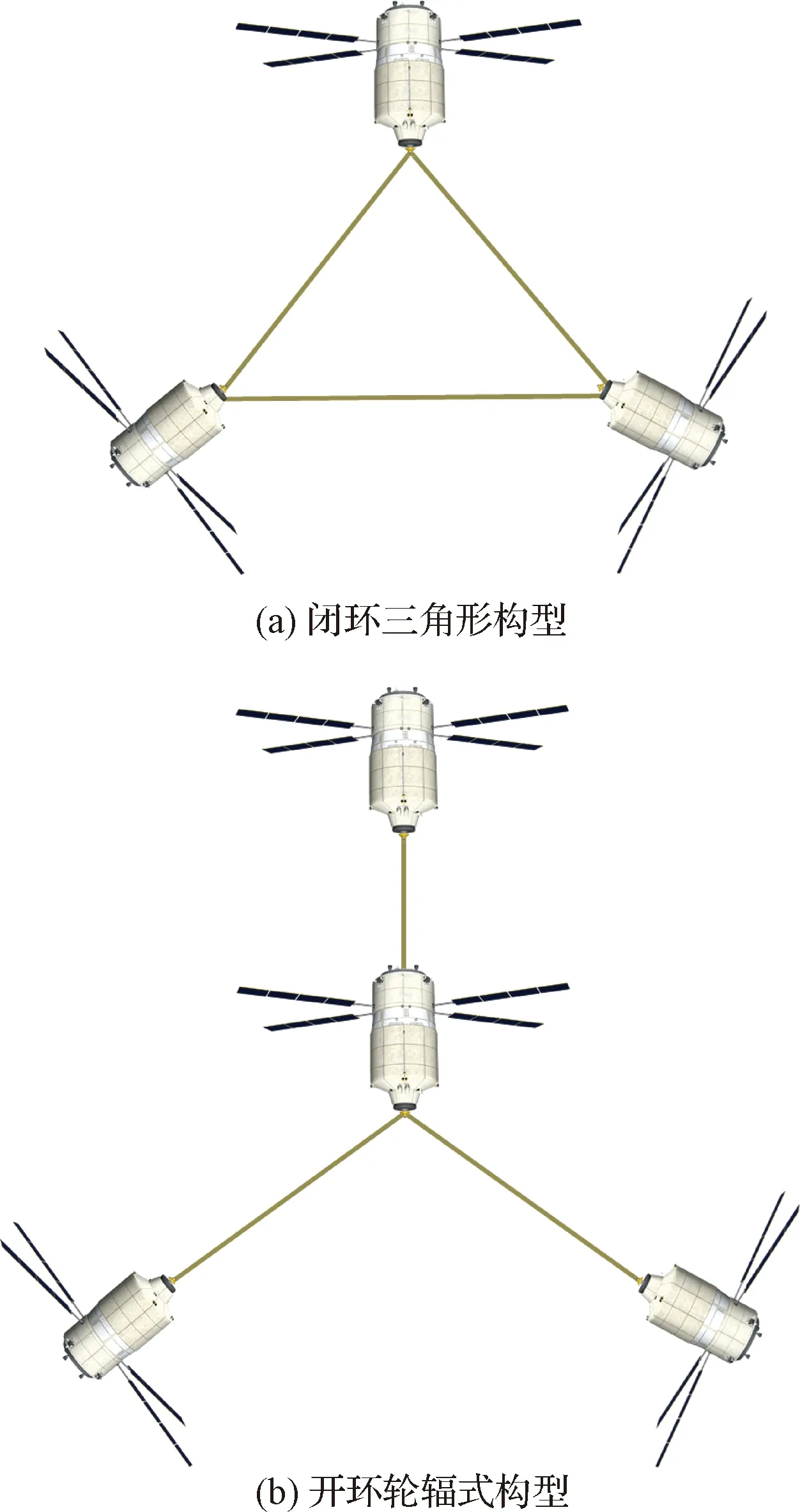
圖3 二維構型

圖4 三維構型
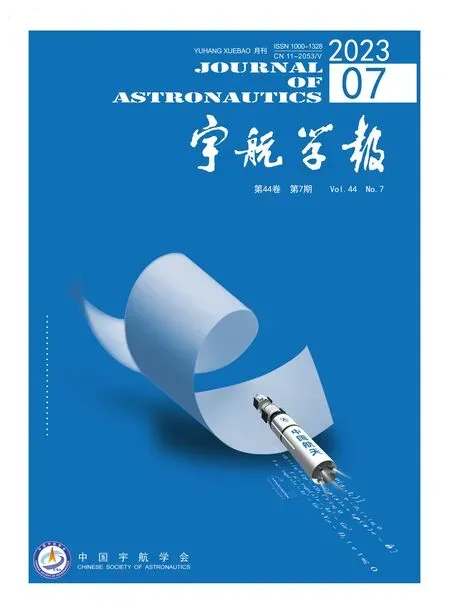
按照繩系編隊的穩定飛行形式,系統還可以分為靜態構型和動態構型兩大類[22]。在靜態構型編隊中,整個編隊系統與軌道坐標系保持相對靜止。靜態構型編隊主要以重力梯度、阻力以及電磁力等方式來保持構型的穩定,例如圖2所示的一維重力梯度穩定構型、一維阻力穩定構形。對于動態構型,編隊系統會相對于軌道坐標系進行旋轉運動,從而使得系繩拉緊來實現整個編隊系統的穩定。例如二維離心力穩定構型、三維離心力-重力穩定構型,如圖5所示。
圖5 多維動態構型
動態構型編隊為了使系繩在編隊中保持張力,系統必須旋轉。在張力的作用下,整個系統會產生剛性作用,即系統可以被視作剛體。相反,如果系繩沒有張力,或者當系統在拉緊和松弛狀態之間變換時,各星體之間會發生碰撞或纏繞等事故。如圖6所示,對于在圓軌道上軸對稱旋轉的繩系編隊系統有三種相對平衡:圓柱形平衡、雙曲線平衡和圓錐形平衡,在這種平衡下,整個編隊系統自旋軸以與軌道運動相同的速度旋轉[23]。在這三種平衡狀態中,圓柱形平衡態自旋軸垂直于軌道平面,雙曲線平衡態自旋軸垂直于當地垂線,編隊運動在地球上的投影是一條直線,因此這兩種平衡態不適用于繩系編隊對地球進行觀測。而對于圓錐平衡,其自旋軸垂直于軌道切線方向,其運動投影到地球表面將呈橢圓形,可以增大對地球的觀測范圍。
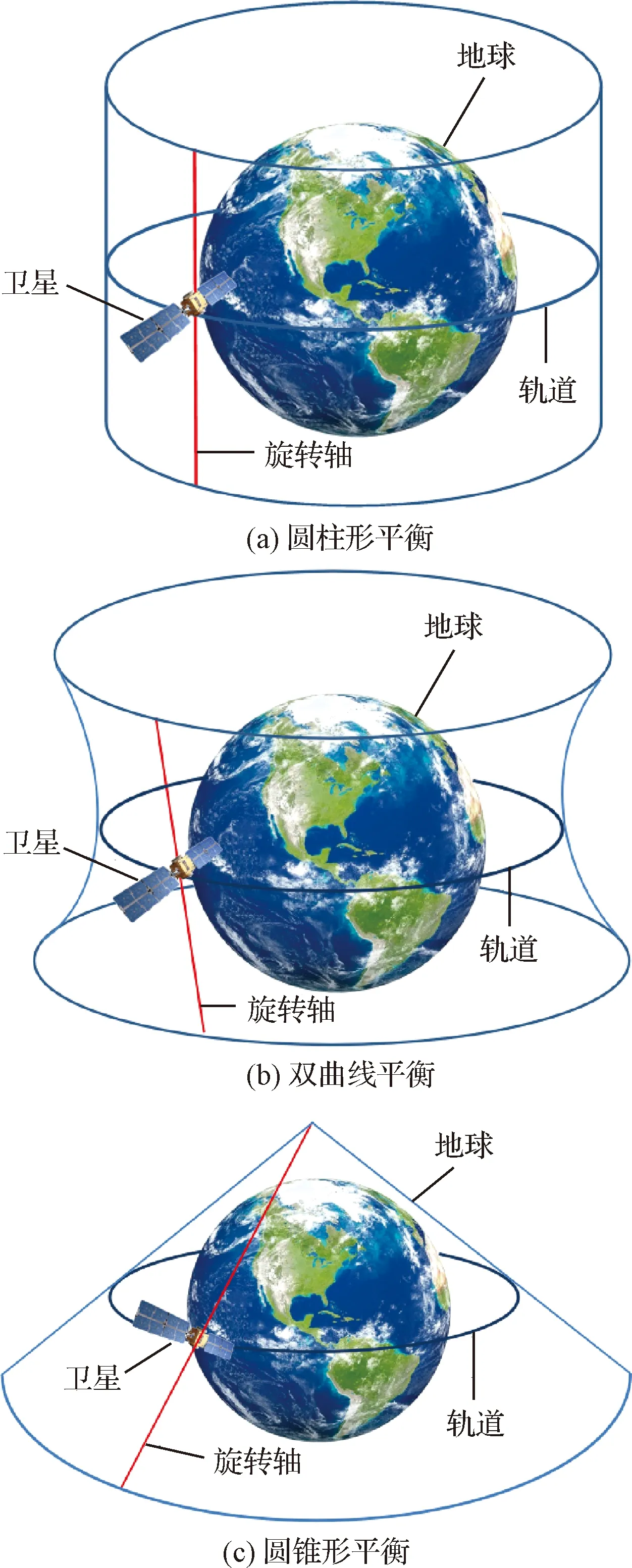
圖6 相對平衡狀態
不同構型的繩系編隊具有不同的結構特性,例如系統穩定方式、適用任務場景等。余本嵩等在文獻[24]中對不同構型下的繩系編隊系統穩定性進行了總結,如表1所示。本文查閱了從2000年至2022年期間的多篇空間多體繩系編隊研究文獻,參考了102篇較為權威的文獻,給出了不同構型繩系編隊的文獻研究數量對比,其中一維構型繩系編隊研究占比38%,二維構型研究占比52%,三維構型占比10%。在二維構型繩系編隊中,三角形構型和輪輻式構型是研究熱點,占比分別達到了49%和34%。可以看出,目前對于空間多體繩系編隊系統的研究主要集中于一維構型和平面式構型,而空間構型由于結構比較復雜,模型的復雜程度較高,因此對于該類構型研究較少。
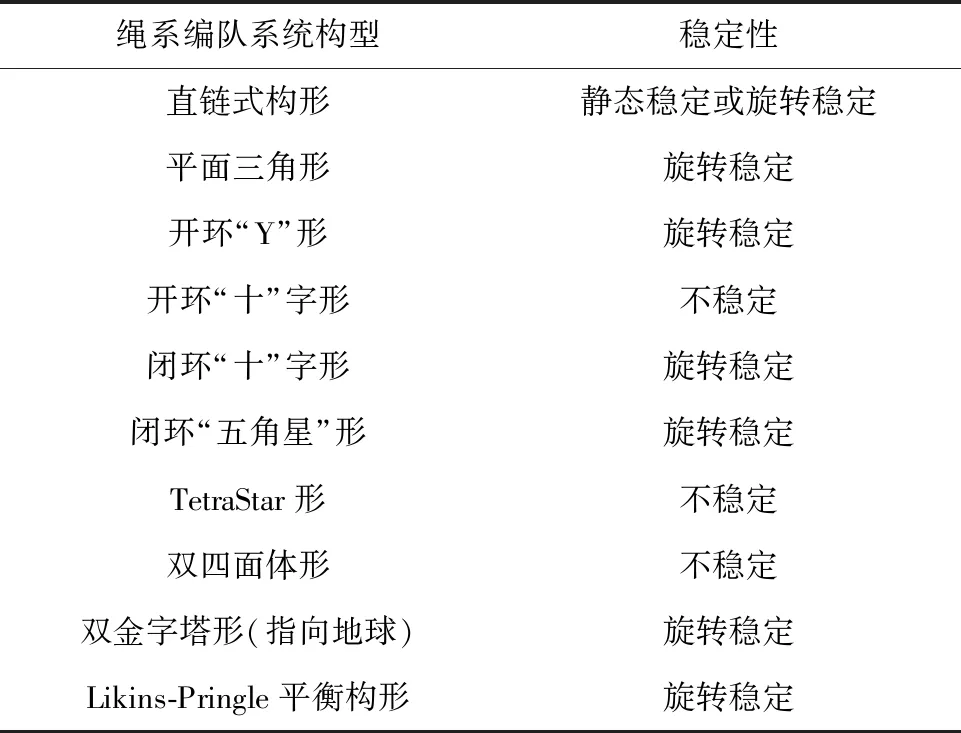
表1 不同構型下的繩系編隊系統穩定方式[24]
1.2 系繩模型
系繩模型建立是空間繩系系統研究的基礎,目前應用最廣泛的系繩模型主要包括三種,剛性桿模型、彈性桿模型以及珠點模型。在早期的研究中,研究人員通常將系繩看作剛體,不考慮系繩的彈性和柔性,這種簡易的模型主要用來設計系統的標稱展開軌跡。隨著研究的不斷深入,學者們又提出了彈性桿模型,這種模型將系繩看作一種只能在受拉時產生拉力而無法在受壓時產生彈力的“彈簧”,相當于只考慮了系繩的縱向振蕩。但實際的系繩除了在縱向會產生振蕩,在橫向也會有振蕩。針對這種情況,研究人員建立了系繩的珠點模型,將系繩看作一個個珠點,珠點之間通過彈性桿連接,這種模型也是現在研究中常用的相對精確的一種系繩模型。
1.2.1剛性桿模型
剛性桿模型是一種較為簡單的系繩模型,如圖7所示,該模型忽略了系繩的彈性和柔性,將其視為一根不可拉壓的剛性桿,即系繩剛度趨于無窮大,兩端分別連接著系統中的不同航天器。
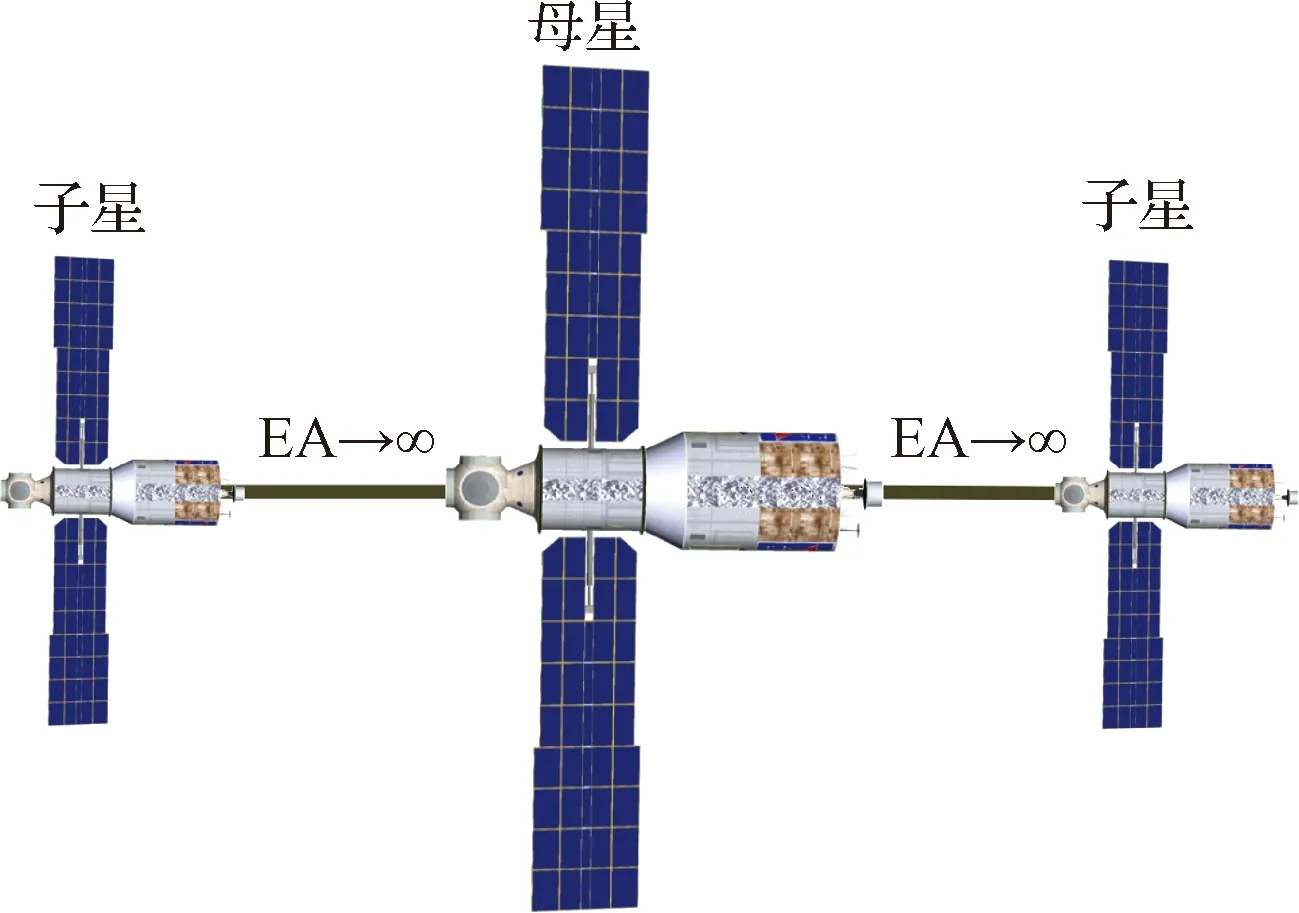
圖7 剛性桿模型
剛性桿模型在90年代被眾多學者提出,主要用于雙體繩系系統的標稱展開軌跡設計[25-26],之后諸多學者將剛性桿模型拓展至多體繩系編隊模型的建立,通過簡化系繩模型,對繩系編隊飛行的可行性以及動力學進行分析。Tragesser等將剛性桿模型分別用于任意數量衛星的環形繩系編隊和雙金字塔型繩系編隊標稱軌跡的設計[27]。之后Kumar等忽略了系繩質量、阻尼效應以及橫向振動,通過所提出的約束系統非線性運動控制方程的數值模擬結果和平衡分析,驗證了在軌道平面上實現三角形編隊飛行的可行性[28]。以上研究均未考慮平臺姿態,Menon等將系繩建模為剛性桿模型,考慮了星體姿態,研究了編隊中各平臺姿態的動力學和控制[29]。由于平動點在深空探測中有巨大的應用前景,眾多學者對平動點軌道上的繩系編隊動力學特性進行了深入研究。Sanjurjo-Rivo等利用剛性桿模型,研究了繩系編隊系統在日-地平動點處的動力學分析,并給出了幾個穩定系統的控制律,為繩系系統在太空探索提供了一定的理論支撐[30]。Cai等[31]考慮系繩為不可伸展且忽略質量的剛性桿,分析了一種輪輻式繩系衛星編隊在平動點附近的動力學,并基于希爾近似,提出了一種新的非旋轉或旋轉繩系編隊的動力學公式。在此基礎上,Cai等[32-33]又對閉環三角形繩系編隊動力學穩定性進行了深入研究,分析了軌道振幅、旋轉速率以及系繩長度等參數對系統穩定性的影響。為了研究日地平動點繩系衛星編隊的重定向控制,Luo等[34]利用剛性桿模型,設計了用于系統狀態和控制輸入的標稱軌跡。Huang等[35]研究了一種輪輻式繩系機器人編隊系統,忽略了系繩質量和彈性等影響,提出了一種系繩張力和主星扭矩的協同控制策略。之后,又在另一種輪輻式繩系編隊建模中,采用剛性桿假設,研究了系繩的展開和回收問題[36]。Zhai等[37]針對眾多研究中未考慮星體和系繩之間的耦合問題,基于剛性桿模型,考慮了星體自轉與系繩展開之間的耦合,研究了軌道平面內輪輻式繩系編隊的展開控制問題。Chen等[38]將編隊系統建模為質點-剛性桿系統,對近地軌道上三角形繩系納米衛星系統的展開問題進行了研究。Wang等[39]假設系繩為剛性桿,針對線性繩系衛星編隊系統設計了分階段展開的方案,利用Lagrange方程建立了編隊系統的標稱模型,通過參數優化得到了繩系衛星編隊系統的標稱軌跡。Zhang等[40]基于簡化的剛性桿模型,分析了直鏈式繩系編隊在構型轉換過程中的非線性動力學特性。
1.2.2彈性桿模型
在實際情況下,系繩會隨著所受外力的變化而發生形變,進而產生內應力。因此學者們又引入了較剛性桿模型更為貼合實際繩系系統的彈性桿模型。如圖8所示,彈性桿模型考慮了系繩的彈性而忽略了其柔性,將系繩視為一根不會彎曲的直桿。
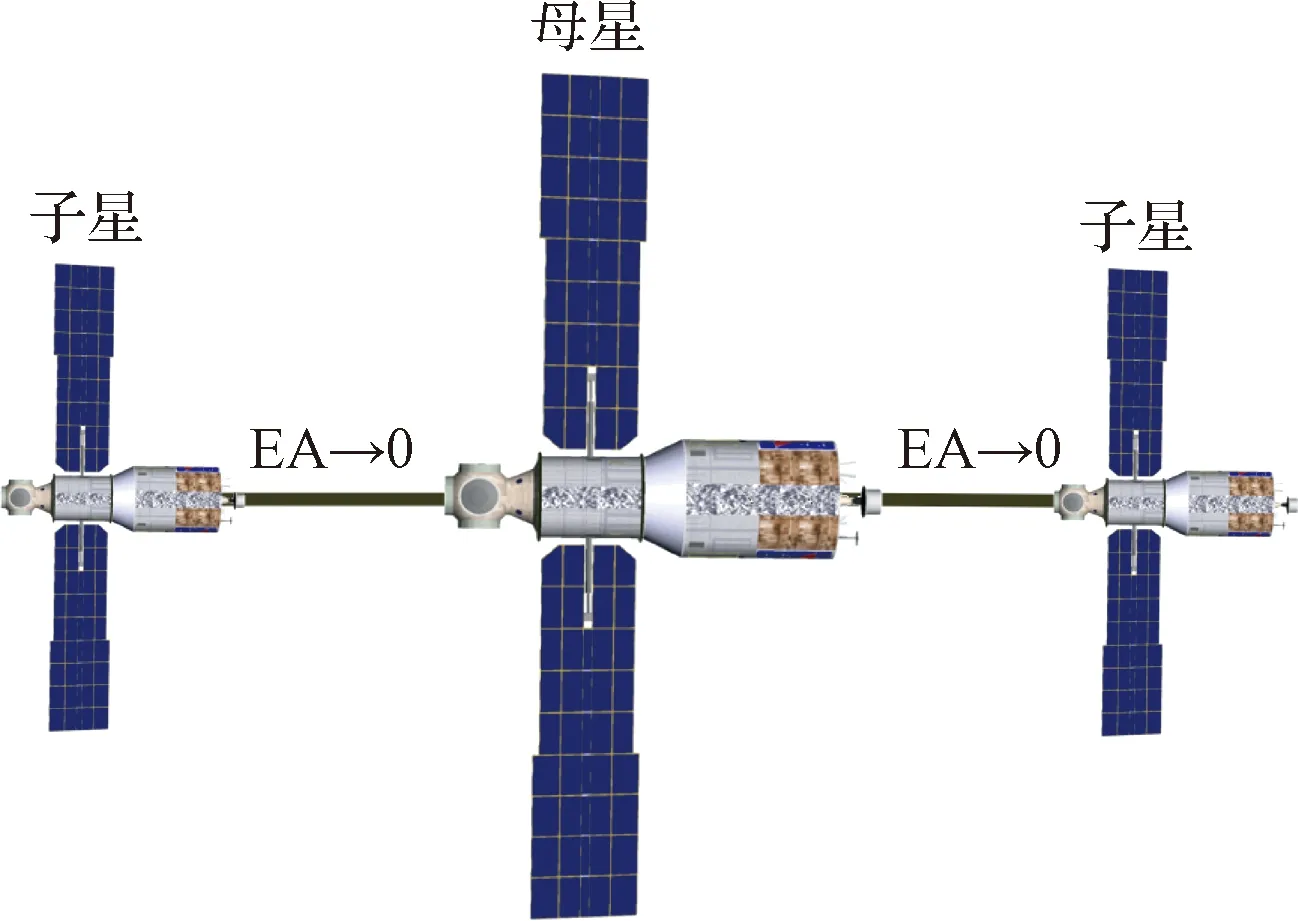
圖8 彈性桿模型
Pizarro等[41]考慮系繩彈性并將星體近似為質點,研究了開環和閉環兩種輪輻式結構繩系編隊的動力學,使用Lagrange方法推導了兩個系統的運動方程。Williams等[42]基于彈性桿模型,提出了一種考慮軌道運動、系繩彈性以及重力梯度效應的三角形繩系編隊動力學模型,該模型被眾多學者在研究三角形繩系編隊時采用[43-45]。耿凌璐[46]考慮系繩彈性桿模型,利用Newton第二定律建立了三角形繩系編隊在非慣性參考系下的動力學方程,研究了J2攝動、熱效應等因素對編隊穩定性的影響。Qi等[47]考慮系繩彈性,利用Lagrange方程得到了一種庫侖雙金字塔繩系編隊的運動方程,探討了該編隊應用于地球同步衛星配置的可行性。Zhang等[48]也提出了一種金字塔型繩系庫侖編隊,考慮彈性桿模型,并利用Lagrange方程推導了編隊的動力學模型。Huang等[49]在Williams的研究基礎上,考慮系繩彈性,利用Lagrange方程建立了三角形繩系編隊動力學模型,并提出了一種基于濾波器的狀態估計方案,解決了繩系編隊狀態測量的問題。基于該模型,Su等[50]進行了一系列三角形編隊動力學特性以及穩定展開控制研究,計算出了編隊自旋穩定時的自轉角速度范圍,為后續的編隊控制提供了很好的理論支撐。
1.2.3珠點模型
珠點模型將系繩離散為一系列由無質量彈簧連接的質點,兩端分別與主星和子星相連接,如圖9所示。隨著所選取的離散點的數量越多,模型與真實系繩系統越接近,但同時也使系統變得復雜,同時增大了理論研究的難度與仿真運算的時間。

圖9 珠點模型
Yan等[51]首次將系繩珠點模型應用在直鏈式構型繩系編隊中。之后,Tragesser等將這種模型用在了閉環自旋多體繩系衛星編隊和雙四面體型繩系編隊上面,用于實現地球定向觀測任務[27]。Nakaya等[52-53]也將珠點模型用于三角形繩系衛星編隊系統上,并提出了釋放新珠點時克服系統不連續性的方法。Williams等在文獻[54]中也利用珠點模型對三角形繩系編隊的動力學進行了分析,并將其拓展至雙金字塔型繩系編隊。為了更加清晰的描述系統的動力學響應進而分析控制系統的性能,在基于該模型對繩系系統進行研究時,研究者們一般采用Galerkin模態法[55]和有限元法[56]完成方程的離散化。劉壯壯等[57]考慮了系繩的密度非線性、非線性彈力以及空間攝動因素的影響改進了珠點模型,并定量分析了執行任務時系繩的橫縱向振動。余本嵩等[58]在前人研究的基礎上提出了一種時變的珠點模型,隨著系繩的不斷展開,系繩上的珠點也不斷的增加。為了突出系繩質量對系統動力學的影響,Avanzini等[59]利用珠點模型建模獲得的結果與簡單無質量系繩模型進行比較,結果表明系繩質量對封閉構型的編隊動力學產生較大影響。之后,Avanzini等又在文獻[60]中利用珠點模型分析了軌道偏心率對閉環繩系編隊的影響。Luo等[13]將系繩建模為珠點模型,基于希爾近似,開發了一種新的柔性多體繩系編隊動力學模型,該模型可應用于任意構型的N體繩系衛星編隊系統。基于該模型,Luo等[34]又研究了日地平動點直鏈式繩系編隊的重定向控制。
通過前人的研究可以看出,雖然剛性桿模型和彈性桿模型無法反映真實情況下的繩系系統狀態,但有利于降低控制器設計難度并提高計算效率,便于對系統進行一些簡單直接的分析,因此被廣泛應用于繩系系統控制方法驗證、標稱軌跡設計等研究。當需要提高模型精度時,則需要同時考慮系繩質量、彈性、形變等因素,從而建立更加精確的珠點模型。雖然珠點模型的精確度較高,更加貼切實際任務場景中的系繩,但是該模型的復雜度很高,會導致計算耗時很長,不便于對系統進行分析。所以大部分研究者會先使用系繩較為簡單的剛性桿模型、彈性模型來驗證猜想,然后在珠點模型上施加實際控制器得到驗證。
2 空間多體繩系編隊全流程控制
空間多體繩系編隊在進入太空后,根據任務控制需求可分為三個部分,包括繩系編隊構型形成控制、構型穩定保持以及星體姿態機動控制。
2.1 空間多體繩系編隊構型形成控制
編隊構型形成是空間多體繩系編隊一切應用技術的基礎,包括實現繩系編隊系統的快速穩定展開、回收。此外,針對不同的太空任務,繩系編隊還可能通過編隊重構形成其他編隊構型。為使繩系編隊按照合理的方式完成構型形成,達到系繩與航天器之間不發生纏繞、盡可能的節省燃料等實際目標,需要對系繩展開方案進行具體的設計。目前已經有許多關于繩系編隊展開及回收的研究,控制方法主要有張力控制、長度控制以及速度控制等。Nakaya等[52]基于虛擬結構方法,使用預先確定的角動量分布以及系繩張力分布來計算自旋角速度,從而實現三角形繩系編隊的展開。Williams等[61-62]利用張力控制確定了不同自旋條件下的最佳展開和回收軌跡,并對系統旋轉速率和機動時間的影響進行了參數研究,數值結果說明了系繩展開和回收的對稱性。Liu等[63]針對輪輻式構型繩系衛星編隊開發了一種純張力控制策略,以抑制展開過程中的系繩振動,而不向子衛星施加推力,最終系繩能夠完全穩定地展開到所需的輪輻式結構。劉麗麗等[64]研究了輪輻式三體繩系衛星編隊面內飛行時的最優回收控制問題,針對不同回收初值及受擾情況,計算了繩系衛星編隊飛行的最優控制張力和飛行軌跡。考慮到張力控制的局限性,Chen等[38]提出了一種系繩張力和外部低推力結合的控制律,在實現穩定展開的同時保證了控制律的簡潔性和有效性。Kumar等[65]設計了一套繩長控制律,使三體直鏈式繩系衛星編隊可以沿水平方向逐一穩定展開/回收。文獻[66-67]針對日地平動點附近的輪輻式旋轉繩系衛星編隊,利用數值仿真研究了編隊重構階段的動力學穩定性。蘇飛等[68]針對圓軌道上的開環輪輻式繩系衛星編隊,分別研究了在重力梯度力補償和無補償兩種情況下的自旋展開控制策略,通過速度控制實現了繩系編隊的有效展開,仿真結果表明兩種展開控制策略能夠保證編隊穩定展開。以上針對系繩的展開控制研究均未考慮星體姿態運動對系繩的影響,于是,Zhai等[37]針對一種開環輪輻式繩系編隊,考慮到了母星的自旋運動與系繩展開之間的耦合,研究了軌道平面內自旋穩定繩系編隊的展開控制問題,并且開發了具有重力梯度補償的控制策略。黃攀峰等針對三角形繩系編隊展開問題進行了深入研究,在文獻[69]中定量分析了編隊自旋穩定時的自轉角速度范圍,為之后的穩定展開控制提供了理論依據。由于針對繩系編隊狀態估計的研究較少,Huang等在文獻[70]中研究了具有狀態觀測器的繩系編隊的穩定展開,針對系統速度不可測的情況,給出了一種高增益觀測器來對速度變量進行估計。之后,Huang等[71-72]又針對在實際空間環境中繩系編隊可能存在的通信資源受限問題,基于事件觸發機制設計了一系列展開控制策略,不僅可以實現編隊的穩定展開,還能減少對通信資源的消耗。
2.2 空間多體繩系編隊構型穩定保持
繩系衛星編隊系統構型穩定性是繩系編隊領域的研究重點和熱點,由于太空中重力梯度力和低軌道高度下的空氣阻力的存在,一維線性構型繩系編隊能夠滿足重力梯度力穩定和阻力穩定的條件,并保持線形的構型穩定。Misra等[73]研究了直鏈式構型編隊系統在構型形成過程中的四種平衡位置及其穩定性,驗證了其中沿當地垂線的平衡位置是穩定的。Avanzini等[59]從Misra的研究結果出發,對一種由四顆衛星連接得到的編隊系統進行了研究,得出除了四顆衛星共線的平衡方式外,還有16種平衡解決方案的特殊情況。在線形構型的基礎上,又有學者研究了多顆衛星平面排布的平面構型方法。Tragesser等在文獻[74]中基于錐形Likins-Pringle相對平衡的軌道設計,研究了具有任意數量衛星的環形編隊系統穩定性。Kumar等[28]對一種三角形繩系編隊穩定性進行了研究,實驗結果證明要使系統穩定則需要編隊旋轉速率與軌道角速率的比值不能小于0.58。Pizarro等[75]對Y字型輪輻式繩系編隊和閉環十字型繩系編隊穩定性進行了研究,發現當編隊在軌道平面上旋轉時,對于具有四顆星體的輪輻式構型是穩定的。當星體數量超過4顆后,則需要外部系繩構成閉環式編隊才能保持穩定。陳志明等[76-77]根據力學方法證明了Thomson平衡下繩系衛星編隊系統自旋角速率與軌道角速率的比值在0.61和2.61之間時,系統可以保持穩定。Yu等[78]使用Floquet理論得到了使旋轉三角形編隊系統留位狀態穩定的初始速度取值范圍。蔡志勤等[79]深入研究了位于日地平動點附近的旋轉三角形繩系編隊系統的動力學與控制問題,重點分析了編隊系統在構型形成和保持時的穩定性,研究結果均表明三角形繩系編隊可以通過旋轉保持穩定。
在平面構型的基礎上可以構建更為復雜空間編隊構型,并通過自旋和重力梯度力等使其在繞地飛行中保持穩定。Sabatini等[80]對一種雙金字塔構型繩系編隊進行了穩定性研究,認為該種構型保持穩定的條件極為苛刻,在真實條件下很難成功。Williams等[54]也對雙金字塔構型繩系編隊系統進行了動力學仿真研究,從其結構特點出發,對在旋轉軸與地面垂直時的運動穩定性進行了研究。Avanzini等[60]對一種由重力梯度力及其自旋離心力共同作用保持穩定的雙四面體繩系編隊的穩定性進行了研究,并對其構型穩定性的保持進行了控制。基于雙金字塔型穩定性的研究,黃攀峰等[81]首次提出了雙金字塔繩系衛星編隊的狀態估計方案研究。
2.3 空間多體繩系編隊姿態機動控制
繩系編隊運行在太空中,針對不同的任務需求,編隊星體往往需要進行一些姿態機動來達到理想的工作位置。由于編隊各星體通常具有較大的質量和尺寸,因此星體姿態運動對系統產生的影響不可忽視。目前對空間繩系系統姿態動力學的研究主要聚焦于雙體繩系系統,在很多利用雙體繩系系統進行碎片捕獲、軌道轉移等研究的文獻中,均對星體的姿態動力學進行了深入分析。然而多體繩系編隊由于結構復雜,大部分研究均考慮星體為質點,對于姿態動力學的研究還較少。Lemke等[82]首先探索了通過利用系繩張力提供的扭矩來控制繩系衛星姿態的可能性。Modi等[83]研究了繩系衛星編隊剛體平臺的姿態動力學和控制,并基于Lyapunov第二種方法提出了一種非常有效的偏移控制算法。Nakaya等[52]將衛星視作剛體并考慮其姿態,使用虛擬結構法實現了三角形繩系衛星編隊的展開控制。Chung等[84-85]利用分散控制討論了多體繩系編隊的自旋速率以及衛星剛體姿態控制問題,這是第一次提出了用于繩系編隊的無推進劑欠驅動控制方法,并基于麻省理工學院SPHERES試驗臺進行了驗證。Chang等[86]研究了一種三體直鏈式繩系編隊,并且考慮了每一個星體的姿態,采用狀態相關的Riccati方程(SDRE)控制器調節姿態誤差,并將集中式和分散式方法應用于動態系統,仿真驗證了SDRE控制器用于繩系衛星姿態控制具有良好的控制性能。蘇飛等[68]和Zhai等[87]均考慮到母星姿態與系繩展開之間的耦合關系,對輻射開環形繩系編隊穩定展開控制進行了研究。Sun等[88]提出了一種任意數量的直鏈式繩系衛星編隊,考慮了母星姿態運動,利用絕對節點坐標公式(ANCF)和自然坐標公式(NCF)分別用于精確描述柔性系繩和剛性衛星的大變形和大整體運動。Luo等[34]考慮衛星的姿態運動,研究了日地L2平動點處柔性多繩系衛星編隊重定向控制,所建立的靈活模型可用于描述具有任意結構的多繩系衛星編隊系統。考慮到系繩的擺動問題,賈程等[89]基于母星的姿態機動,通過調整母星推力方向實現了繩系衛星編隊系統軌道跟蹤。Chen等[90]考慮了母星旋轉與系繩展開之間的耦合效應,建立了軌道平面上輪輻式構型繩系編隊的動力學模型。并基于Bellman動態規劃方法,考慮了展開過程中系繩張力的物理約束,提出了一種最優控制器,通過數值仿真驗證了所提控制策略的有效性。
3 繩系系統地面試驗
由于太空任務復雜,成本高昂,因此在進行太空任務前需要進行充分的研究與試驗,而地面模擬試驗對在軌繩系系統的研究起到非常重要的作用。目前國內外已經開展了多種空間多體繩系編隊系統的地面試驗研究方案。
3.1 地面氣浮平臺法
氣浮平臺法具有建造周期短、成本低、易于實現及維護等優點,通過設計平板止推軸承的大小能夠實現高達幾噸的飛行器微重力實驗,且實驗的時間不受限制。通過更換接口部件即可實現重復利用,可靠性和魯棒性較高,對飛行器結構沒有太多限制,且根據不同實驗目的可以較為容易地進行二次設計和改造。地面氣浮臺作為一種結構簡單、成本較低的試驗裝置,已經被諸多學者應用于空間繩系系統的地面試驗驗證,是目前繩系系統地面試驗應用最廣泛的一種方法。
Nakaya等[91]為了研究空間繩系衛星編隊問題,提出了實現旋轉三角形繩系編隊構型形成的方案,如圖10所示。由同時發射的航天器(步驟a)組成的初始系統,通過系繩展開(步驟b)形成穩定的編隊構型(步驟c)。為了驗證所提出方案的可行性,Nakaya等開發了一套在地面情況下用于模擬繩系編隊的氣浮平臺系統,該系統包含氣浮平臺、三個衛星模擬器和一個CCD相機組成的位置測量子系統,最終成功實現了三角形繩系衛星編隊的穩定展開。
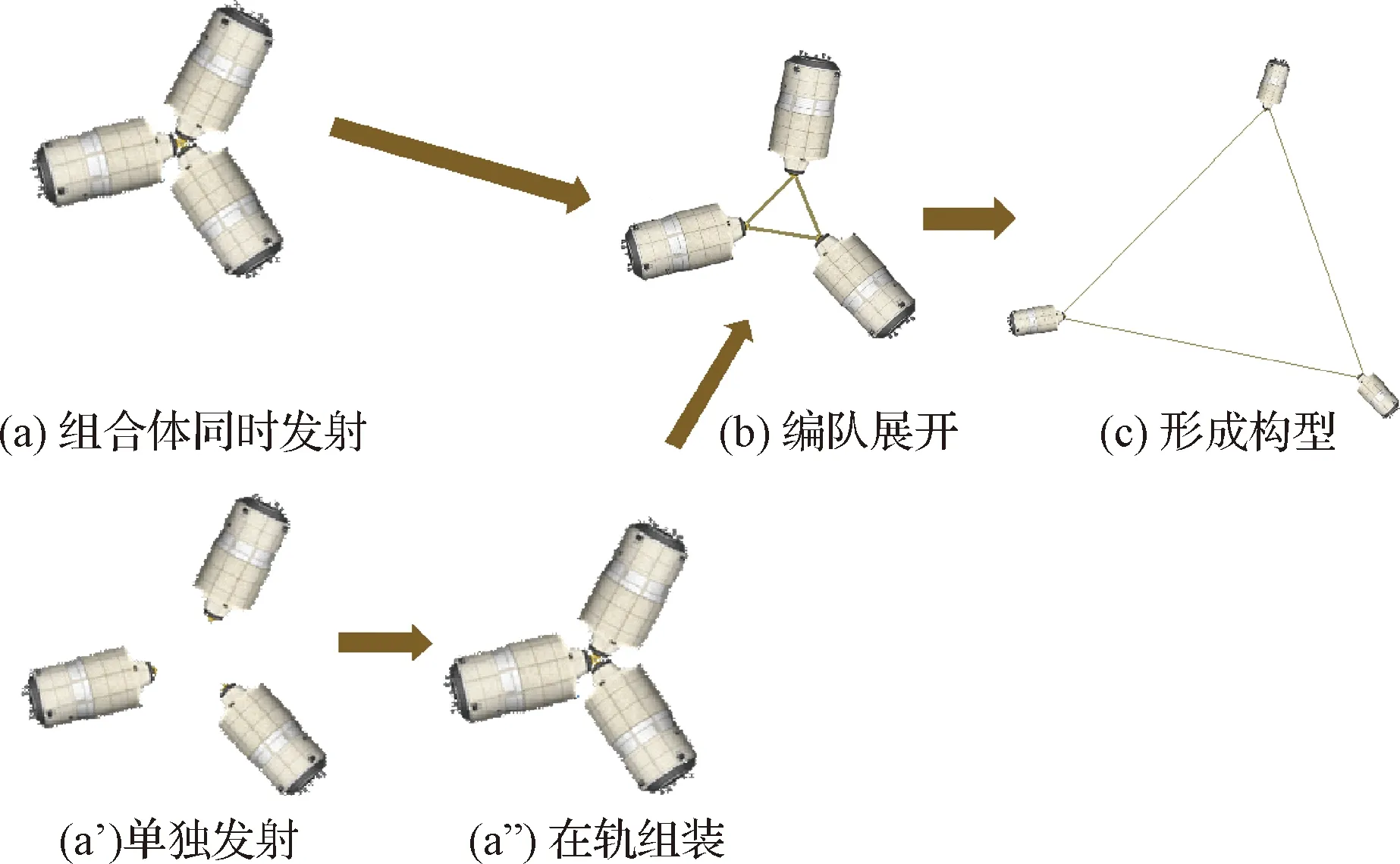
圖10 繩系衛星編隊構型形成方案[91]
麻省理工學院空間系統實驗室(MIT-SSL)開發了名為SPHERES的多顆納米衛星試驗臺,主要用于編隊飛行和自主對接、交會和重構算法試驗驗證[92]。在該平臺基礎上,Chung等[93-94]成功進行了一系列直鏈式、三角形繩系編隊系統的旋轉展開動力學試驗,驗證了在未來的空間干涉儀任務中不依賴推進器的情況下控制繩系編隊的可行性。之后,Chung又在文獻[95]中使用多顆SPHERES微型衛星對繩系編隊飛行的一些關鍵控制策略進行了試驗驗證。基于該平臺,Mantellato等[96]開發了一個用于模擬雙質量繩系系統在軌動力學的軟件模型,并通過SPHERES平臺對軟件模型進行了驗證,為后續在太空微重力環境開展更精確的試驗進行了預研。Iki等[97]通過電動力繩系(Electro-Dynamic Tether,EDT)系統的數值模擬,利用氣浮臺研究了使用推進器從卷軸式卷筒上展開系繩。推進器用于確保展開長度為數公里的系繩,通過地面試驗評估了幾個關鍵的參數,如推力和推進器激活周期,明確了展開所需推進器的要求,該裝置主要用于研究EDT技術進行軌道轉移的主動碎片清除系統。
為了研究繩系編隊動力學問題,金棟平等[98]為空間繩系系統研究建立了氣浮平臺設施,該平臺可以模擬繩系系統所經歷的微重力場,通過使用平面空氣軸承試驗臺和科里奧利力,在反饋控制下使用機載推力。之后,該團隊利用動態相似原理構造了等效地面試驗系統[78],該系統由花崗巖試驗臺、三個由系繩連接的衛星模擬器和一個立體視覺測量系統(SVMS)組成,如圖11所示。基于該試驗系統,該團隊研究了在近地軌道上飛行的三角形繩系衛星編隊的旋轉穩定性,成功實現了直鏈式構型和三角形構型繩系編隊的穩定展開和保持。

圖11 繩系衛星編隊地面氣浮臺試驗[78]
為了驗證繩系編隊動力學與初始狀態之間的關系,Yu等[99]又在該試驗臺上對長繩系編隊系統(LSTF)動力學進行了分析,討論了LTSF的三種典型面內運動以及面外運動抑制,給出了三種運動形式的擺狀振蕩、旋轉運動和不規則運動。圖12為LSTF旋轉運動軌跡仿真,可以看出,地面試驗模擬器軌跡與衛星軌跡基本保持一致,驗證了地面等效試驗的準確性。
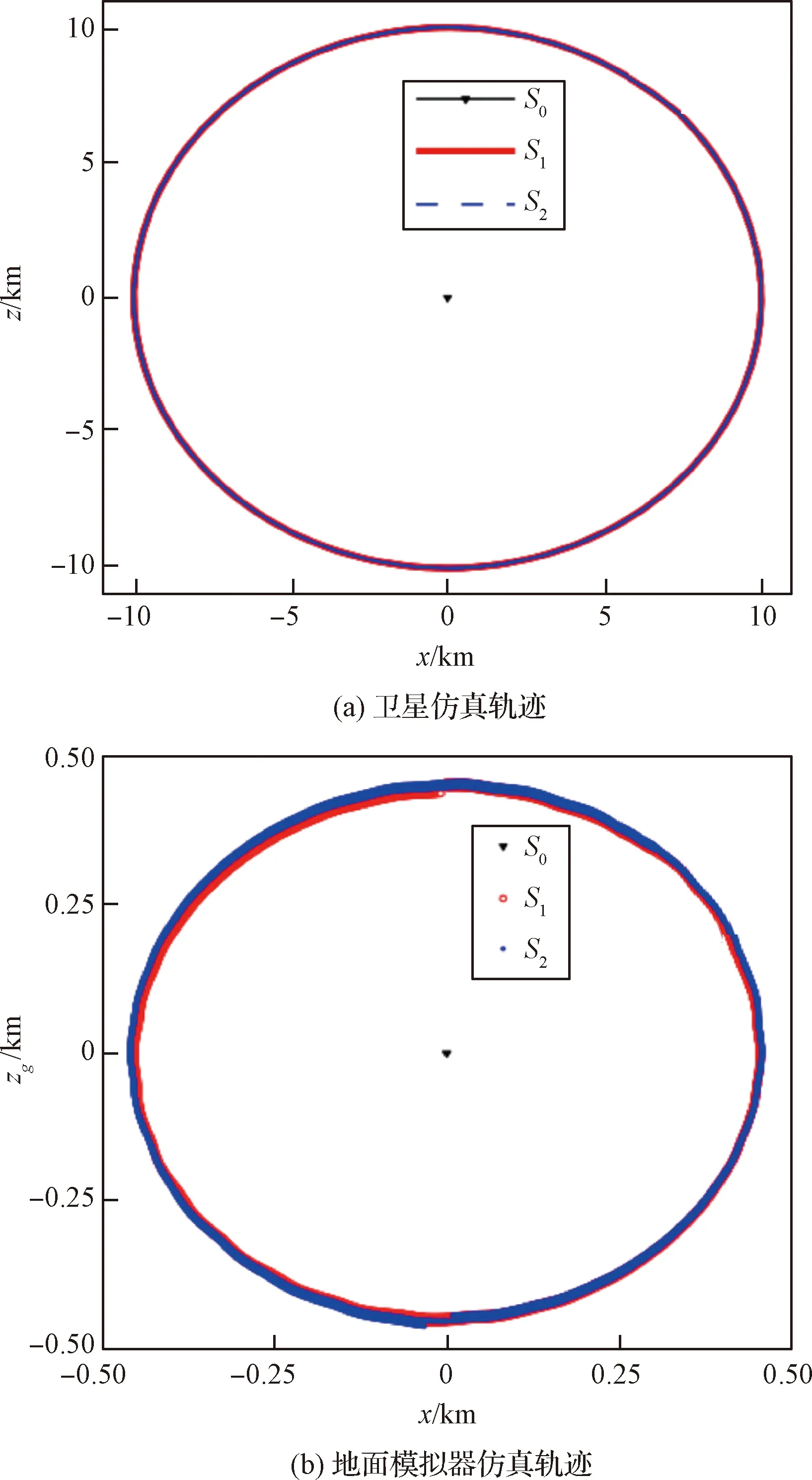
圖12 LSTF旋轉運動軌跡[99]
3.2 機構測試法
為了驗證繩系系統釋放、制動和回收等試驗機構的可靠性,研究人員提出了機構測試法,主要是通過一些特殊設計的機構來測試繩系系統內部裝置的特性。這些機構相對整個系統而言質量較小,受重力影響較低,因此在使用該方法進行相關模擬實驗和可靠性驗證時,對微重力環境的要求較低。
易琳等[100]研究了用于空間捕獲的繩網收口方式,介紹了一種由雙轉子電機、雙卷筒和自由導繩套筒組成的自適應系繩卷取機構。該機構能適應負載不平衡變化,不會發生系繩纏繞現象,具有較強的自適應性。Schultz等[101]為模擬Tips試驗[102]中系繩內部張力變化的情況,采取控制系繩水平位移,使系繩只在豎直方向上移動的結構,利用擺錘來提供可變張力,如圖13所示。通過選取合適的映射關系,分析系繩在試驗中的內部張力情況可以研究在軌任務中系繩的內部張力情況。
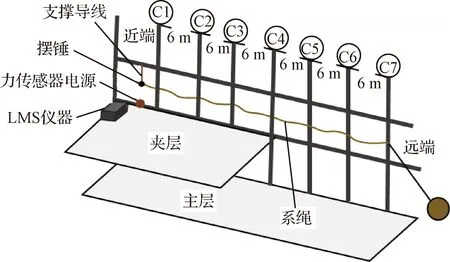
圖13 繩系衛星水平結構配置地面測試裝置示意圖[101]
Nakamura等[103]開發了能夠展開和回收微型衛星的微型系繩纏繞機構(MTRM)。它由一個卷軸、一個驅動電機和一個平風機構組成,包括一根2 km長的系繩,可控制卷軸電機扭矩以避免系繩松弛。此外在該機構基礎上搭建了一個名為“繩系動力學模擬器”(TDSM)的地面試驗系統。利用該模擬器對雙體繩系編隊進行了地面試驗,用于驗證該機構對系繩展開和回收的可靠性和有效性。試驗最終成功將系繩展開至2 km。但在回收階段,振動角在最后100 m發散。
3.3 失重飛機飛行法
除了以上提到的試驗裝置外,另一種通過飛機拋物線飛行構造微重力環境的方案也被一些學者應用于繩系系統的試驗驗證。其原理是飛機通過先爬升再迅速向下俯沖進行飛行的過程可以營造時間約幾十秒10-2~10-3g左右的失重環境,可以用于精度較高的三維空間微重力實驗模擬,但這種方法成本高昂,而且實驗周期較短,目前僅有少數學者進行了失重飛機環境試驗測試。
Benvenuto等[104]設計了一種可裝載在失重飛機上的系繩展開試驗裝置,該裝置主要由兩顆立方體衛星結構組成,衛星結構內部附有系繩展開機構、高速攝像測量模塊和數據存儲模塊。在完成展開控制律的地面試驗驗證后,Benvenuto等將該裝置裝在飛機上,在失重環境下進行試驗。Zhu等[105]通過空氣軸承轉臺和微重力拋物線飛行試驗,對為微重力環境中的繩系立方體衛星展開進行了試驗驗證。繩系立方體衛星任務包括兩顆1U立方體星,100 m長的帶狀系繩。系繩通過拉動展開,兩顆立方體以期望的速度分離。該試驗進行了各種地面測試,以驗證設計的分離速度、估計內部摩擦力和測量展開的系繩長度。最后,通過微重力拋物線飛行試驗驗證了繩系系統展開的工程模型。試驗過程如圖14所示。

圖14 拋物線飛行下的系繩展開試驗[105]
該試驗給出了兩個立方體衛星之間相對距離的實測時間歷程,如圖15所示。可以看出,立方體衛星在自由飛行狀態下的相對分離距離軌跡幾乎是一條線性直線。虛線表示自由飛行狀態下的相對分離速度,為1.42 m/s,高于地面試驗測得的1.23 m/s的速度。試驗結果證明了繩系系統在微重力環境中的內摩擦力小于在重力環境中測量的內摩擦力,驗證了所設計的繩系系統的有效性,為后續的試驗提供了很好的理論參考價值。
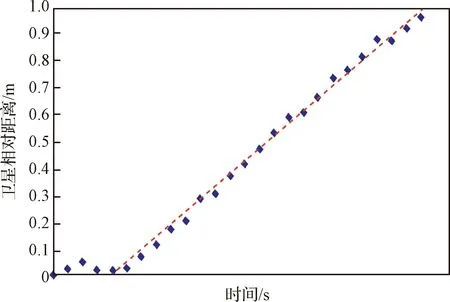
圖15 衛星相對距離和分離速度[105]
地面試驗是在進行昂貴、耗時的航天試驗之前,驗證繩系系統動力學和控制理論研究的重要工具。表2比較了幾種地面模擬試驗方法特點。可以看出,在已經進行的地面仿真試驗研究中,氣浮平臺法和機構測試法由于造價低、設備維護簡單等優點,已經被諸多學者用于繩系系統地面試驗驗證,但氣浮平臺只能在系統層面通過極低的摩擦力來模擬失重環境,無法為系統中的每一個結構進行失重模擬。通過氣浮平臺實現三維空間的復雜運動的實驗較為困難,主要用于二維平面的飛行器模擬試驗。而機構測試法僅適用于一些簡單的內部機構可靠性驗證,無法進行高精度的模擬試驗。失重飛機試驗雖然可以實現對微重力環境的高精度模擬,但由于設備造價及維護成本高昂,試驗條件極為苛刻,且單次實驗的微重力實驗時間較短,對飛行器的各種設備性能指標無法全面考核,目前已開展的相關實驗較少。

表2 各種地面模擬試驗方法對比
4 結束語
空間多體繩系編隊研究的快速發展將促進太空探索和開發技術的進步。本文首先簡要介紹了空間多體繩系編隊的構型,并總結了國內外研究學者對繩系編隊動力學建模與控制、地面試驗方面的研究成果。可以看出,作為一種新型的空間編隊技術,繩系編隊已經吸引了越來越多的關注,并且已經取得了很多研究成果,但仍存在一些不足,未來應從這幾個方面開展進一步的研究。
1) 目前關于繩系編隊動力學建模方面,針對諸如J2攝動、熱效應、大氣阻力以及太陽光壓等空間環境外部因素的擾動,已經積累了很多研究。但在編隊星體姿態的研究上,大部分系統建模均將星體考慮為質點,忽略了星體姿態的影響,僅有少量文獻考慮到母星的姿態運動,但仍忽略了子星姿態。另外關于進一步考慮系繩與星體運動之間的耦合、系統姿態與軌道之間耦合的研究則更加稀少。因此,考慮繩系編隊系統耦合關系的動力學建模分析將是未來研究的重點。
2) 空間多體繩系編隊作為一種節省能量的編隊構成方式,缺乏基于能量分析和對比方面的文獻研究,未來需要更多從能量角度考慮的研究,例如與無繩系衛星編隊的能量消耗對比,說明繩系編隊在能量節省方面的可靠性。
3) 在現有的空間多體繩系編隊星體姿態研究中,大部分文獻沒有考慮星體姿態機動的局限性,針對繩系編隊星體姿態運動的限制范圍分析,值得更加深入的研究。
4) 在編隊構型研究上,目前大多文獻僅針對某一種特定構型繩系編隊進行控制,幾乎沒有考慮繩系編隊在不同構型之間進行切換的研究。編隊重構控制將是未來繩系編隊研究的難點與重點。
5) 以往關于繩系編隊的地面試驗主要集中于結構較為簡單的直鏈式或三角形繩系編隊,沒有針對空間構型繩系編隊的地面試驗研究。為了對繩系編隊系統的可行性、可靠性等做更加深入的研究,復雜結構繩系編隊的地面試驗將是未來的研究重點。
6) 目前已開展的地面試驗裝置大部分還是以氣浮臺的方式進行研究,無法真正模擬太空失重環境。而失重飛機飛行法成本過高,維護周期太長。因此,未來可考慮建立更多微重力環境下的試驗,例如可利用水下環境或真空罐進行試驗裝置搭建,目前在繩系系統領域還沒有這方面的研究。
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
工業設計(2022年8期)2022-09-09 07:43:20
體育科技文獻通報(2022年3期)2022-05-23 13:46:54
遼金歷史與考古(2021年0期)2021-07-29 01:06:54
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
中學生數理化·七年級數學人教版(2020年10期)2020-11-26 08:24:50
數學物理學報(2020年2期)2020-06-02 11:29:24
科技傳播(2019年22期)2020-01-14 03:06:54
民用飛機設計與研究(2019年4期)2019-05-21 07:21:24