基于多傳感器融合的定位技術概述*
2023-08-28 08:36:46朱洪達
南方農機 2023年18期
朱洪達 ,羅 強 ,辛 琪
(重慶三峽學院機械工程學院,重慶 404100)
隨著社會的進步和科技的發展,定位技術已經滲透到了人們生活的方方面面,無論是自動駕駛、無人機、語音聊天等領域,還是交通、旅游、工業生產、緊急救援等領域,都離不開定位技術。定位技術分為室外定位和室內定位兩類,但都無法實現室內外無縫連續定位。室內定位存在應用范圍的限制,以移動網絡定位技術為例,在室外時,受到不同環境的影響,如在隧道、山頂等信號不好的地方,不能實現高精度定位;室外定位由于衛星信號不能穿透障礙物,所以室內定位也無法使用GNSS 技術或者GPS 技術[1]。如何實現室內外的連續定位成為導航定位領域的研究熱點,也是未來定位發展的趨勢。近年來,多傳感器融合的定位技術實現了室內外無縫的連續定位,也成為當下導航定位領域的主流定位方式。本研究列舉了幾種具有代表性的多傳感器融合定位方法,并對比了其中三種定位技術的優缺點。在此基礎上,探討了定位技術的發展趨勢,提出了多傳感器融合定位技術的優化方向。
1 多傳感器融合定位技術
目前常用的多傳感器融合定位技術包括GNSS/IMU傳感器融合、GPS/INS/磁力計傳感器融合、里程計/LiDAR/GNSS傳感器融合。三類多傳感器融合定位技術的相關技術特點如表1所示,隨著更多傳感器的組合定位,其定位精度越高,但是定位成本也逐漸增大,并且多傳感器的組合定位普遍存在著室內外信號源不能平穩切換的問題,束縛了定位精度的進一步提高。多傳感器的組合定位是大勢所趨,未來會有更多類別的傳感器應用在導航定位領域,不斷提高無縫定位的精度和完整度。通過對比三類傳感器融合定位技術發現,里程計/LiDAR/GNSS傳感器融合定位技術定位精度高。
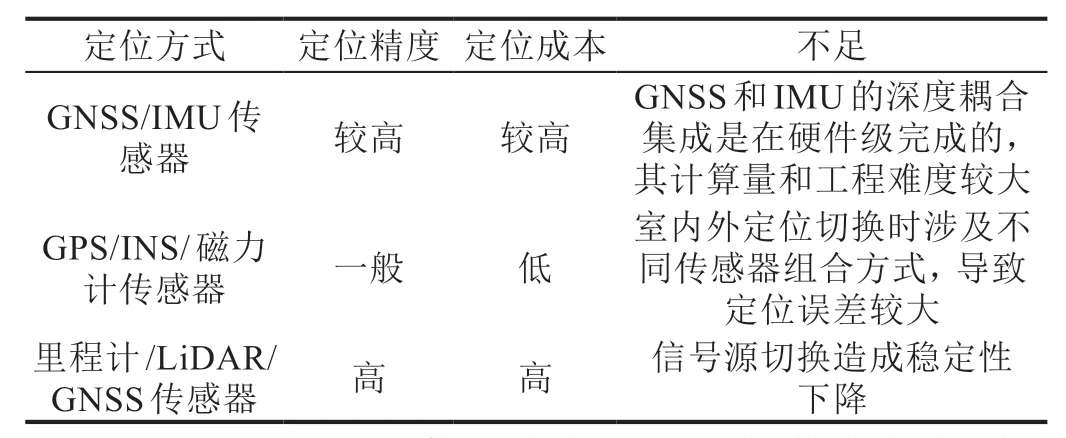
表1 三類傳感器融合定位技術對比
1.1 GNSS/IMU傳感器融合定位技術
GNSS 和IMU 是目前比較流行的定位技術和航位推算系統相輔相成的導航傳感器。GNSS 只要用4顆衛星建立瞄準線(LOS)就能提供準確的位置和速度信息,但受信號中斷、信號干擾和多徑效應影響,這種精度可能會降低。IMU 具有高頻更新測量平臺方向的優勢,并且不受環境條件的影響,但漂移效應會導致測量誤差累積。一些研究已經證明了兩種傳感器在擴展卡爾曼濾波器(EKF)方面的融合,為了提高傳感器融合性能,可以采用預處理GNSS 和IMU數據進行融合。
GNSS/IMU 傳感器融合用于定位技術的優勢:GNSS 具有長期高精度的特點,可以補償IMU 的快速誤差漂移。同時,IMU 測量可以為組合導航系統提供高速率速度和姿態,并可在GNSS 測量不可用時進行航位推算,獲得短期定位解決方案。近年來,GNSS/IMU 集成技術得到了廣泛的發展,如通過添加磁傳感器、里程計、光探測與測距(LiDAR)或攝像機等輔助傳感器,以改進集成算法。在低成本GNSS和IMU 傳感器的研究中,通常以集成算法的改進,來獲得無需額外傳感器的最優導航解決方案。
1.2 GPS/INS/磁力計傳感器融合定位技術
此類定位技術通過采用GPS、INS 和磁力計三類傳感器進行有機融合,實現了室內外的無縫連續定位。當外部環境進行室內外切換時,如何平穩進行信號的轉換成為關鍵,該定位技術運用卡爾曼濾波器對GPS 和INS 的組合信號進行濾波[2];在室內環境中,通過INS 傳感器和磁力計的相互配合,采集得到運動學數據,包括航向角和加速度等信息,并借助軌跡推算法進行高精度的定位。
該定位技術優點:可以實現較高精度的定位,通過比對相關實驗測試數據,發現三類傳感器的綜合定位方式優于任意單傳感器定位和任意兩類傳感器融合定位。在定位精度方面,該方法提高了定位技術的核心功能,拓寬了多傳感器融合定位的研究思路。該定位技術缺點:磁力計的不穩定性使得磁力計測量的航向角數據不夠準確,容易受到外部環境的干擾,這就使得必須對航向角進行修正,對相關算法的改進優化提出了要求,增加了研究難度。只要涉及室內外切換,必然會考慮過渡點的自動切換問題,使得過渡點附近的定位信號精度不高,這也是所有多傳感器融合定位技術的技術難點,只有掌握了室內外無縫定位的平滑過渡方法,才能實現真正的高精度無縫定位。
1.3 里程計/LiDAR/GNSS傳感器融合定位技術
該定位技術采用了三類傳感器進行融合定位,其創新點在于采用了擴展卡爾曼濾波算法來提高室內外的連續定位精度。在室內環境中,LiDAR 信標定位算法不僅可以準確計算定位數據,而且還可以實時更新量測方程和卡爾曼增益系數,對系統做出新的姿態最優估計,并以此作為下一時刻系統方程的初始位置,循環迭代,不斷更新定位數據,實現連續定位[3];在室外環境中,GNSS 可以獲得定位數據并計算量測方程,以此為基礎數據,獲得傳感器的協方差矩陣,從而計算出卡爾曼增益系數,對系統的位姿估計進行實時更新。
這種定位技術在定位精度和定位穩定性上都有了明顯的提高,并創新性地提出了一種室內外信號源平滑濾波算法[3],較好地解決了過渡點的信號切換問題,然而由于傳感器數量的增加,會導致室內外定位切換時不同傳感器之間的平穩過渡存在誤差,需要進一步對算法進行優化,這既是定位領域后續的研究重點,也是定位精度提升的潛在空間。
2 多傳感器定位技術發展趨勢
目前主流的定位方法是根據場景的具體需求和各類傳感器的技術特點,融合各種傳感器的優勢,實現在各種復雜環境下,對目標位置做出高精度的最優估計。除了GNSS/IMU 傳感器融合、GPS/INS/磁力計傳感器融合、里程計/LiDAR/GNSS 傳感器融合三種多傳感器融合定位技術之外,還有許多不同的融合定位方法,如劉家宏等[4]使用GPS 與WiFi 融合進行室內外定位,能夠實現95%綜合場景定位誤差低于2.5 m;關維國等[5]應用北斗偽距差分與WiFi 融合室內外定位,融合定位平均均方根誤差為1.963 m,其精度可滿足一般民用需要。在智能化、網聯化、微型化發展潮流下,傳感器技術的升級具有了深厚基礎,傳感器的集成化趨勢正日趨凸顯,更多高精度傳感器的融合組合是現代多傳感器定位技術的發展趨勢,將高精度定位技術與北斗進行融合是當今時代的風向標[6]。因此,將北斗系統融入到導航定位領域是大勢所趨,也是科研者的心之所向。
3 優化方向
只要涉及多傳感器的組合定位,就會存在室內外信號源如何平滑切換的問題,這也是該領域在未來發展中需要解決的核心問題。無論是從定位算法方面進行改進,還是從傳感器接收機的性能方面進行提升,都是多傳感器融合定位技術的優化方向,也是實現更高定位精度的必由之路。以里程計/LiDAR/GNSS 傳感器融合定位技術為例,對其進行優化,主要分為兩個方面,一是如何實現室內外無縫定位的平滑過渡,二是如何提高定位精度。
3.1 室內外無縫定位平滑過渡優化
在進行導航定位時,避免不了室內外的切換。從室外環境進入室內環境時,在過渡點附近由于靠近建筑物,使得衛星信號不能很好地被接收到,即使接收到信號也可能失真,直接導致GNSS 系統產生較大的誤差,幾何精度因子(GDOP)會逐漸增大,GNSS 系統接收到的衛星數會逐漸減少[3];而當人們從室內環境進入室外環境時,在過渡點周圍接收到的衛星信號十分微弱,GNSS 定位方法在此處無法正常工作,繼續往外走,系統接收到越來越多的衛星信號,GDOP值逐漸減小,同樣導致了定位誤差的增大。
本研究為了保證信號源在室內外定位切換時保持平滑穩定,提出了一種優化方法[7-10],即通過找到室內外定位精度臨界點的GDOP 值,以此最優轉化范圍值為閾值,進行信號的平穩切換。當人們從室外走向室內時,GDOP值會逐漸增大,當GDOP值增加到閾值范圍時自動切換定位方式,這樣的平滑過渡方法可以大大提高系統的定位精度。具體切換方式如圖1所示。
3.2 定位精度優化
高定位精度是核心的導航服務性能需求,提高定位精度也是定位技術優化的關鍵。除了選擇更加優化的算法來實現高精度的定位之外,還可以設計高效的信息融合方案,以提高系統的定位性能。比如以高精度或高可靠性的定位源為基準,采用緊耦合的方式融合其他定位源以獲得位置的最優估計。此外,還可以選擇目前市場上最新的高精度定位測向終端產品,比如P3-DU北斗高精度定位測向接收機,它不僅可以支持北斗單系統獨立定位測向和多系統聯合定位測向,還能夠提供厘米級RTK 定位精度和毫米級載波相位觀測值,可以應用于交通、農林、電力、金融等領域。
4 結語
多傳感器融合的定位技術在5G 時代有著舉足輕重的作用,如何將定位技術與更多數字化和智能化的傳感器進行有機結合,是目前學術界和工業領域的研究趨勢。本研究概述了三類多傳感器融合的定位技術,歸納總結了三類傳感器組合定位的技術特點以及定位技術的發展趨勢,分析了當前多傳感器融合定位技術的優化方向,即室內外無縫定位平滑過渡優化和高精度優化。
猜你喜歡
房地產導刊(2022年5期)2022-06-01 06:20:14
今日農業(2021年19期)2022-01-12 06:16:36
中老年保健(2021年11期)2021-08-22 03:15:44
建材發展導向(2021年12期)2021-07-22 08:06:48
建材發展導向(2021年7期)2021-07-16 07:07:52
中學生數理化(高中版.高二數學)(2021年12期)2021-04-26 07:43:48
鴨綠江(2021年35期)2021-04-19 12:24:18
中學生數理化(高中版.高考數學)(2021年1期)2021-03-19 08:28:38
考試與評價·高一版(2020年6期)2020-11-02 02:45:24
現代出版(2020年3期)2020-06-20 07:10:34
