輪胎式自動化場橋箱區防碰撞保護系統的研究與應用
2023-08-29 04:11:36王勇
中國設備工程 2023年15期
王勇
(天津港聯盟國際集裝箱碼頭有限公司,天津 300456)
隨著綠色智能化港口的步伐加快,大多數傳統碼頭都開始陸續加入自動化升級的隊伍中。在傳統碼頭自動化升級過程中,面臨最多的則是輪胎式場橋(RTG)的自動化升級。RTG 自動化改造過程中,保證設備在自動化運行過程中的安全是極為重要的。為此則需要增加箱區防撞保護系統。箱區防撞保護系統包括小車方向和吊具起升方向的保護。
1 系統概述
1.1 小車防撞保護系統
在小車平臺的前方和后方各安裝1 個的激光掃描裝置,實時掃描龍門吊堆場內集裝箱或障礙物高度和輪廓信息。在小車運行時,小車前方和后方的激光掃描儀會實時掃描到行進方向箱區的高度信息和吊具的高度,當吊具的高度與箱區的高度差小于設定值(默認值1m),在小車方向吊具離高箱的距離小于一定的距離時(距離可自行設定)實現小車減速、停止、急停三級保護,從而防止碰撞事故。
1.2 吊具防撞保護系統
為了避免在自動或遠程手動作業時,吊具在下降過程中砸到相鄰列或者相鄰貝的集裝箱,在吊具上安裝傳感器進行保護,當吊具自動下降時,實時檢測吊具與周圍集裝箱或者障礙物的距離,當系統檢測到的距離小于設定的范圍值后,場橋自動化控制系統停止吊具和小車的動作,并進行報警轉人工處理。
2 測距傳感器選擇
本部分將從原理和碼頭作業環境等角度,選擇防撞系統所用測距傳感器的類型。常見的測距傳感器有超聲波測距傳感器和激光測距傳感器兩種。
2.1 超聲波測距傳感器
超聲波測距的原理是利用超聲波在空氣中的傳播速度為已知,測量聲波在發射后遇到障礙物反射回來的時間,根據發射和接收的時間差計算出發射點到障礙物的實際距離。首先,超聲波發射器向某一方向發射超聲波,在發射時刻的同時開始計時,超聲波在空氣中傳播,途中碰到障礙物就立即返回來,超聲波接收器收到反射波就立即停止計時。超聲波在空氣中的傳播速度為C=340m/s,根據計時器記錄的時間T 秒,就可以計算出發射點距障礙物的距離L,即:L=C×T/2。這就是所謂的時間差測距法。
由于超聲波也是一種聲波,其聲速C 與溫度有關,在使用時,如果溫度變化不大,則可認為聲速是基本不變的。如果測距精度要求很高,則應通過溫度補償的方法加以校正。通過實際的測試,超聲波測距的距離有限且超聲波測距點的范圍比較大,在實際生產作業中,集裝箱堆場的箱縫一般在40cm 左右,超聲波傳感器很難在這種情況下應用。
2.2 單點激光傳感器
按照實際考慮,可以裝在吊具上用來做測距的激光傳感器為單點激光傳感器和小型單線激光掃描雷達。單點傳感器一次只能測量一個點,即只有正對障礙物的時候才能測到吊具與障礙物之間的距離。四繩吊具下降過程中,由于本身機械結構的特點會產生扭動,使得單點傳感器在晃動的過程中很容易被觸發。故最終選擇在吊具上安裝單線激光掃描儀來實現吊具過程中的防撞保護。
2.3 單線激光掃描儀
單線激光掃描儀同時可以測量一個掃描面上的所有能掃描到的物體的距離。
2.3.1 掃描原理
激光掃描儀一般基于脈沖時間飛行原理(TOF),通過連續不停地發射激光脈沖,由旋轉光學機構將激光脈沖按一定角度間隔(角度分辨率)發射向掃描角度內的各個方向而形成一個徑向坐標為基準的二維掃描面。被測物體位置信息通過掃描儀到物體的距離及對應的角度數據給出相關示意圖,如圖1、2 所示。

圖1 激光掃描儀的旋轉光學機構
2.3.2 掃描關鍵參數
激光掃描系統的硬件關鍵因素有掃描距離、掃描角度、掃描頻率、掃描精度等。
掃描距離是指激光掃描儀可以測量的最遠距離,此參數在實際使用過程中受環境影響較大。主要影響因素有:目標物體表面反射率,目標物體形狀,環境干擾等等;一般情況下,廠家會標明物體表面反射率為10%和90%情況下激光掃描儀的測量距離,如圖2 所示。
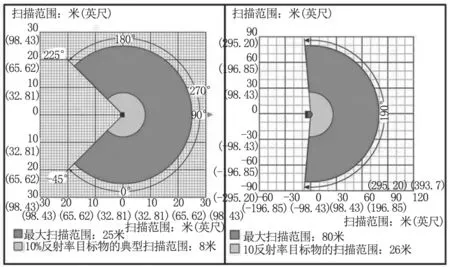
圖2 掃描距離示意圖
掃描角度是指即掃描儀能覆蓋的角度范圍,如圖3所示。
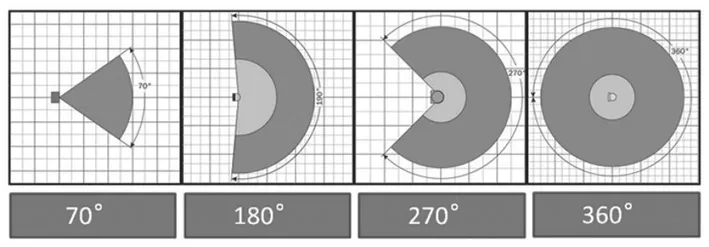
圖3 掃描角度示意圖
掃描頻率是指激光掃描儀每秒鐘掃描的次數,示意圖如圖4 所示。

圖4 掃描頻率示意圖
掃描角度分辨率指兩個相鄰發射激光束之間的夾角,如圖5 所示。
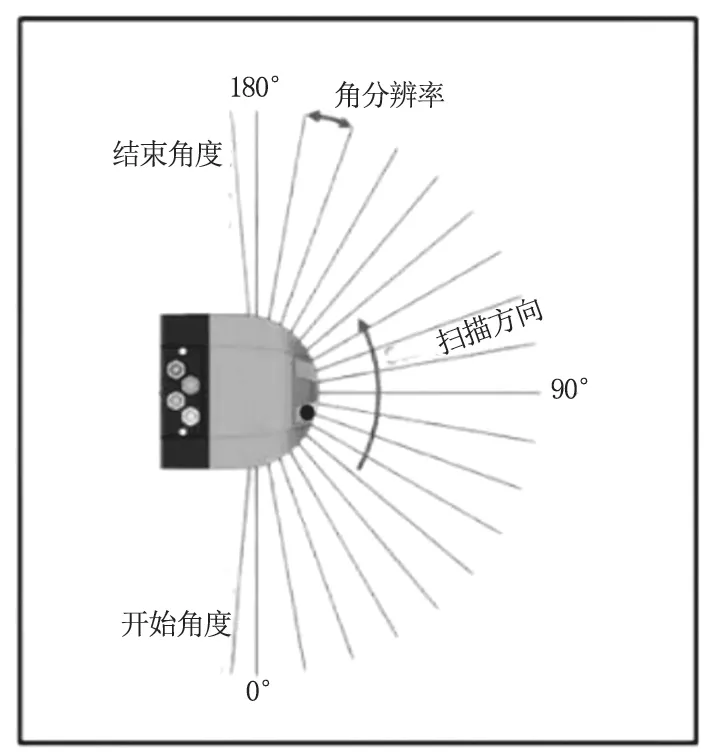
圖5 掃描角度分辨率示意圖
2.3.3 掃描精度
掃描精度分為兩種表達方式:系統誤差和統計誤差。系統誤差是指激光掃描儀多次測量的平均值與真值之間的誤差;系統誤差不能被完全消除,但可以通過預先的標定減小系統誤差影響;統計誤差是指激光掃描儀多次測量的均方差;統計誤差可以采用多次測量取均值減小。
2.3.4 激光掃描儀在系統中的應用
在吊具四周安裝單線激光掃描儀,激光射線垂直向下掃描,安裝位置略大于集裝箱寬度、長度,保證可以掃描到下方的信息。為了很好地起到防撞保護作用,可以將設置減速、停止、急停三級保護,選取一定的監測范圍,分別對應的防護距離為D1、D2、D3,當該區域測距激光返回的最近結果D,當說明在吊具下方有障礙物,則觸發減速,當D <D2 時,則說明進行停止保護,當D <D3 時則需要立即停止,否則,就會撞到旁邊的集裝箱上。
對于D1、D2、D3 距離的選擇,需要根據吊具起升的加速度和最大速度以及負載的重量進行計算。速度和加速度的不同會導致距離的不同,具體的可以在場橋的機械圖紙手冊上找到。安全起見,當計算出D1、D2、D3距離后,需要吊具吊著水箱進行實際的測試。
3 影響防撞系統的因素
3.1 小車方向防撞保護的影響因素
當小車行駛到兩側后,由于RTG 兩邊的橫梁會對小車方向的防撞起到保護作用,從而使小車不能正常地作業,因此,需要根據小車的位置,對保護的距離進行實時更新,當小車運行到橫梁附近時,需要逐漸縮小保護范圍,以保證設備的正常工作。
3.2 影響吊具下降防撞保護的因素
3.2.1 場橋自動定位的影響
首先,假設堆場內集裝箱擺放整齊,箱縫距離也正常,則影響下降保護的因素有大車定位的精度、大車的糾偏精度、小車定位的精度、吊具的回零居中等。
自動化作業對大車的定位要求在±5cm 以內,當定位精度在這個范圍內的時候,則吊具在正常下降的過程中傳感器不會被觸發,設備可以正常工作。如果大車定位的精度大于一定的范圍且旁邊貝位有集裝箱,則在下降的過程中,激光掃描儀則很容易掃描到旁邊貝位的集裝箱,從而造成觸發報警,而這種觸發雖然起到了保護作用,但并不是我們希望看到的。故這種應用就需要將大車定位的精度按照要求做到±5cm 以內。
當大車的糾偏效果不好的時候,在吊具歸零后,其相對于堆場的集裝箱是斜著的,在吊具下降的過程中,激光掃描儀則很容易掃描到旁邊列位的集裝箱,從而造成誤觸發。同樣,小車定位不準的時候,吊具會相對靠近旁邊列的集裝箱,在吊具下降的過程中,吊具上激光掃描儀則很容易掃描到旁邊列位的集裝箱,也會造成誤觸發。
3.2.2 堆場的影響
堆場中影響防撞的主要因素是箱縫之間的寬度和場地的平整度。當箱縫之間的距離過小時,吊具在下降的過程中,吊具上的激光掃描儀很容易掃描到旁邊貝位或者列位的集裝箱,從而造成保護觸發,這種保護觸發多了后,會影響正常的作業。場地的平整度不好的情況下,兩側的集裝箱堆放高了會向兩側傾斜,吊具在下降的過程中,吊具上的激光掃描儀很容易掃描到旁邊列位的集裝箱,從而造成保護觸發。這種保護觸發多了后,也會影響正常的作業。
4 結語
本文從各測距傳感器的原理出發,采用單線激光掃描儀組建箱區防碰撞保護系統并論述其組成、應用及影響因素,可充分保護RTG 自動化改造與作業。
