
航空發動機加力燃燒燃油控制系統主動容錯控制
2023-08-31 02:36:50杭杰李運華楊麗曼
航空學報 2023年14期
杭杰,李運華,楊麗曼
北京航空航天大學 自動化科學與電氣工程學院,北京 100191
對于高性能戰斗機,航空發動機加力燃燒燃油控制系統的性能尤為重要。在加力燃燒燃油控制系統中,燃油計量裝置負責軍機加力工況的燃油流量的自動調節與供給,通過增加燃油流量二次燃燒獲得推力提升。與主燃燒燃油控制系統不同,加力燃燒燃油控制系統工作條件更為苛刻,電液伺服閥、執行器及傳感器等關鍵部件更容易發生故障,故急需設計容錯控制策略(Fault Tolerant Control, FTC)以降低對系統控制性能的影響[1]。
閥控式燃油計量裝置本質為電液伺服控制系統,其主要故障類型有傳感器故障和執行器故障[2]。傳感器種類多樣,故障不盡相同,但都直接影響燃油系統控制精度,故應采取有效控制策略對其進行故障檢測和識別(Fault Detection and Identification, FDI),以免釀成嚴重后果[3]。設計觀測器以監測傳感器故障是處理上述問題的有力措施之一[4],如自適應觀測器、擴展卡爾曼觀測器和模糊觀測器等。值得注意的是,未知輸入狀態觀測器(Unknow Input Observer, UIO)因可有效解耦干擾和故障,現已被成功應用于諸多工業控制領域。Abu Nahian 等[5]利用少量歷史數據設計UIO 以估計電液執行器中各類傳感器故障,同時設計容錯控制以提高系統魯棒性。Tian 等[6]針對一類非線性離散控制系統設計非線性未知輸入狀態觀測器(Nonlinear Unknown Input Observer, NUIO),以同時估計系統狀態和傳感器故障。Gao 等[7]針對具有非匹配擾動和傳感器故障的燃氣輪機,設計基于NUIO 的容錯控制策略以提高系統控制性能。在以上文獻中,UIO/NUIO 雖可有效處理傳感器故障,但無法同時處理傳感器故障、內泄漏故障和非匹配擾動。此為本文核心處理問題之一。
除傳感器故障外,影響燃油系統控制性能的另一主要因素為執行器故障。執行器故障在航空發動機故障中占比約為25%,覆蓋卡滯、斷裂、磨損、泄漏和氣蝕等失效形式。在上述故障中,由泄漏故障引起的質量問題占比近33%。與易監測的外泄漏不同,由加工/裝配誤差、磨損或工件變形引起的內泄漏故障率高且不易發現。內泄漏故障不僅會降低系統回路增益和控制精度[8],亦會降低系統效率、平穩性和使用壽命。本文在文獻[9]的基礎上,為確保加力燃油計量裝置在高供油壓力大流量工況下的可靠運行,重點研究高性能容錯控制以降低非匹配擾動、傳感器故障和執行器故障對加力燃燒燃油系統控制性能的影響。
基于定量反饋理論的被動容錯控制因需預先獲悉故障類型,容錯控制設計保守,現已逐漸被主動容錯控制取代[10]。近年來,諸多研究將執行器故障定位為失效故障或不確定非線性擾動[11]。Wu[12]和Yao[13]等基于參數自適應律估計內泄漏故障,采用自適應控制策略恢復系統控制性能。此外,小波變換、Hilbert-Huang 變換和神經網絡等技術為處理內泄漏故障提供新途徑[14]。但上述文獻并未考慮傳感器故障或測量噪聲對系統控制性能的影響。實際上,傳感器測量的系統信號不可避免會引入測量噪聲,進而引起系統抖動、性能下降甚至失效[15]。期望補償技術不僅可節省在線時間,亦可降低測量噪聲影響。但現有技術無法實現系統在外部擾動和測量噪聲的工況下漸近跟蹤[16]。此為本文第2 個核心處理問題。
綜上所述,在非匹配擾動、傳感器故障及內泄漏故障模式下,加力燃燒燃油控制系統難以實現高精度跟蹤,而現有控制策略僅能處理一個或部分因素。為處理上述問題,本文提出一種基于NUIO 的自適應積分魯棒控制策略。在非匹配擾動和多故障模式下,NUIO 可有效估計系統狀態和傳感器故障,且不受內泄漏故障和非匹配擾動影響。當傳感器故障程度超過閾值時,由位移估計值取代實際測量值參與主動容錯控制策略設計中。結合積分魯棒控制和期望補償自適應控制技術以同時處理傳感器測量噪聲、非匹配擾動下的內泄漏故障;通過引入誤差輔助函數使誤差符號積分魯棒控制可直接處理非匹配擾動。
本文核心創新點如下:
1) 在非匹配擾動、傳感器故障和內泄漏故障模式下,基于NUIO 的自適應積分魯棒控制策略可有效實現燃油系統閥芯位移漸近跟蹤。
2) 基于自適應參數估計的NUIO 可有效估計系統狀態和傳感器故障,且不受內泄漏故障和非匹配擾動影響。
3) 所提出的新型容錯控制策略可在多種故障模式下權衡系統高效性、可靠性和經濟性。
1 系統建模與問題描述
1.1 系統建模
燃油計量裝置工作原理如圖1 所示,其采用電液位置伺服控制計量活門開口與壓差組件維持活門進出口壓差恒定的流量控制原理[9]。該裝置由離心燃油泵、電液伺服閥、計量活門、等壓差組件和線性位移傳感器等部件組成。其中,等壓差組件由先導定差減壓活門、主級執行活門、阻尼活塞、動態阻尼及其余附件組成[17]。高壓渦輪通過齒輪箱驅動增壓泵和高壓離心泵,燃油泵出口處的部分燃油經定值減壓閥流向伺服閥以控制計量活門開度,另一部分燃油經計量活門通向加力燃燒室,為發動機提供熱能以獲得二次推力提升。具體地講,伺服閥輸出控制油進入活門控制腔,通過控制活門閥芯軸向位移調節計量窗口通流面積A,先導壓差活門可維持計量活門進出口壓差ΔP恒定,大部分計量后燃油經主級執行活門流向加力燃燒室。當計量活門閥芯按指定規律運行時,即可實現出口流量Q按規律計量:
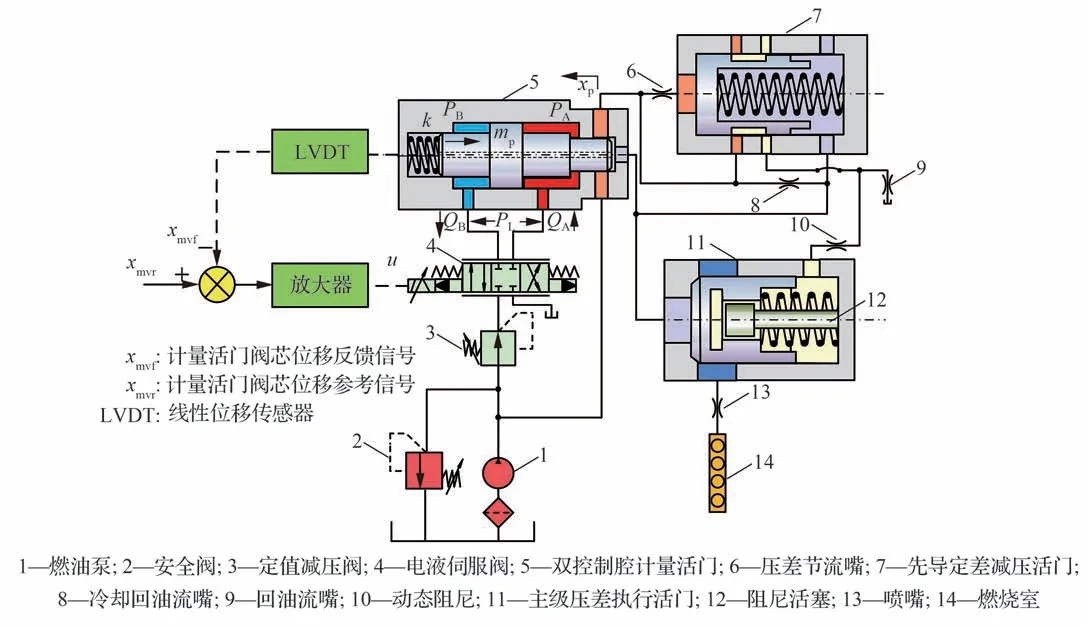
圖1 航空發動機燃油計量裝置工作原理圖Fig.1 Working principle architecture of fuel metering unit in aeroengine
式中:Cd為流量系數;A為計量活門通流面積;ρ為燃油密度;ΔP為計量活門進出口壓差。
計量活門受力平衡方程為
式中:mp為計量活門閥芯及負載折算到閥芯的總質量;xp為閥芯位移;PL=PA-PB為負載壓力,其中,PA和PB分別為計量活門兩端控制腔內壓力;Fs=2CdCvWpcosαΔPxp為閥芯所受穩態液動力;f(xp,x?p,t)為未建模不確定性,如外干擾和閥動態等;Ffe(xp,x?p,t)為非線性摩擦力的集總,包括已知摩擦力Ff(xp,x?p,t)和未知外部摩擦力Fe(xp,x?p,t),其中,Ff(xp,x?p,t)=Fv(x?p)+Fm(x?p),Fv=fvx?p為黏性摩擦力;fv為黏性摩擦系數;Fm(x?p)=Fmp1tanh(Fmc1x?p)+Fmp2[tanh(Fmc2x?p) -tanh(Fmc3x?p)]為具有Stricbeck 效應的靜態摩擦力,Fmc1、Fmc2和Fmc3為摩擦特性形狀系數,Fmp1和Fmp2為不同摩擦特性幅值水平,函數tanhx滿足
計量活門兩腔壓力動態特性方程可表示為
式中:βeA=βeB=βe為燃油體積彈性模量;VA=VA0+Apxp,VB=VB0-Apxp分別為計量活門進出口腔的容積,其中VA0和VB0分別為兩腔初始容積;qL(t)為計量活門內泄漏流量;QA和QB分別為計量活門兩控制腔燃油流量,其表達式為[18]
式中:kq為伺服閥流量增益;xs為伺服閥閥芯位移。
為使非線性函數S(x)光滑可微,定義S(x) ?2 πarctan(1 000x)代替符號函數signx;忽略伺服閥動態特性,令xs=kiu,ki為電流增益。
當計量活門發生內泄漏時(即活門密封存在缺陷),基于Thompson 理論[13],內泄漏流動可視為湍流孔口流動,故式(4)中qL(t)可表示為
式中:Ct0為活門名義內泄漏系數,m5(N·s );Ct為內泄漏故障發生時泄漏系數分別表征系統發生嚴重內泄漏、早期內泄漏和輕微內泄漏時的泄漏系數;η(t-Tf)表征為從時間Tf開始時活門發生內泄漏故障,其表達式為
式中:μ>0 表示活門內泄漏發生速率;μ=0.5表示內泄漏故障緩慢發生;μ=5 表示內泄漏故障平穩發生;μ=10 時,η(t-Tf)近似階躍信號,表示內泄漏故障突發。
當線性位移傳感器發生故障時,計量活門閥芯位移反饋信號xp由xp+xf代替。假設線性位移傳感器故障xf由未知輸出信號ζ引起[19],即
定義變量x=[x1,x2,x3,x4]Τ?[xp,x?p,PL,xf]Τ,由式(2)~式(8)可得燃油系統動態方程:
結合工程實際,燃油系統動態方程(9)具有高強度非線性及模型不確定性等特性:
1) 電液伺服閥壓力流量非線性。由于非線性函數S(x)及開方函數的作用,控制輸入具有非線性特性,故燃油系統屬于不連續非仿射系統。
2) 微分方程結構非線性。當計量活門閥芯位移較大或閥活門間連接油路體積較大時,活門兩腔控制容積VA=VA0+Apxp和VB=VB0-Apxp以分母形式進入系統,直接影響燃油系統非線性壓力的動態特性、跟蹤精度和諧振頻寬。
3) 活門摩擦非線性。當系統高速運行時,可將摩擦簡單視為純黏性摩擦;但系統低速運行時,非線性摩擦對其控制性能影響較大,如Coulomb 摩擦、Stribeck 摩擦及Dahl 效應。故在控制器設計過程中應考慮非線性摩擦效應。
4) 模型不確定性。燃油系統模型不確定性主要包括受工況影響的黏性/庫倫摩擦和彈性模量等參數不確定性和外干擾、未建模泄漏/摩擦和閥動態等不確定非線性。
5) 高標準性。在加力狀態下,戰斗機推力提升50%,軍用航空發動機所需燃油流量增至2 倍。高供油壓力大流量的作業工況對加力燃燒燃油控制系統的可靠運行提出嚴峻挑戰。
綜上所述,燃油控制系統的高強度非線性、模型不確定性、不確定非線性和苛刻的作業環境是限制航空發動機加力燃燒系統控制精度的核心所在。本文所設計的基于NUIO 的魯棒積分自適應容錯控制器如圖2 所示。
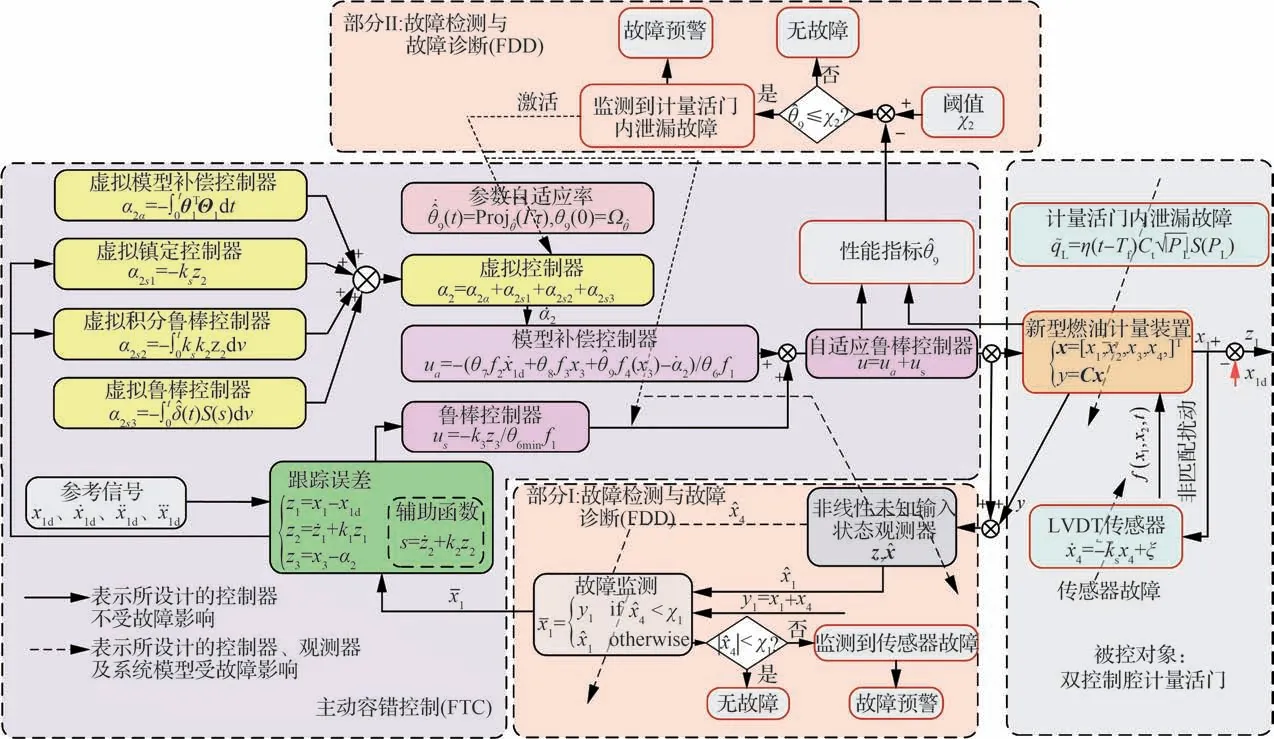
圖2 主動容錯控制結構Fig.2 Structure of active fault tolerant control
1.2 問題描述
本文研究目標為當燃油控制系統存在傳感器故障、內泄漏故障和非匹配擾動時,設計主動容錯控制器,使x1在有限時間內跟蹤到期望軌跡x1d。在此前,做如下假設:
假設1除線性位移傳感器存在故障外,燃油系統內部其余信號真實可測且有界。
假設2參考位移指令yd=x1d∈C3有界。
假設3活門兩端控制腔內壓力有界,即
假設4燃油控制系統內的內泄漏故障和非匹配擾動有界,即
式中:θmin和θmax分別為不確定參數上下確界;δ為系統非匹配擾動的上確界。
說明1本文僅考慮內泄漏故障對計量裝置控制性能的影響,故由內泄漏決定的參數θ9未知,其余參數可以離線識別,且參數識別誤差可視作非線性不確定項,故系統滿足持續激勵(Persistent Excitation, PE)條件。
說明2由假設2 和假設3 可知,f1(x1(t))不為0。為便于控制器設計,令非匹配擾動d(t)是一階可微的。非匹配擾動足夠光滑假設是合理的,因在實際系統中不存在產生不連續力/力矩的物理執行器。假設4 合理性已被試驗驗證[13,20]。
2 基于NUIO 的主動容錯控制器設計
2.1 參數自適應律
定義未知參數θ9的估計值為θ?9,定義非連續映射函數:
定義參數自適應律:
式中:為參數自適應增益;為待定自適應函數。定義誤差
引理1參數自適應函數τ滿足如下性質:
非連續映射函數使得參數始終在給定范圍內變動。引理1 證明過程詳見文獻[18]。
2.2 非線性未知輸入狀態觀測器設計
航空發動機加力燃燒燃油控制系統中存在的諸多干擾無疑增大了FDI 設計難度。傳統基于模型的故障診斷方法需使用含有未知輸入信號殘差,故障檢測與識別的精確度較低。本文設計基于參數自適應律的NUIO,可有效解耦干擾和故障,以避免系統殘差。
令x(t)=[x1(t),x2(t),x3(t),x4(t)]Τ,改寫燃油控制系統狀態方程(9):
式中:d1(t)=[d(x1,x2,t)θ1,ξ];B=[0,0,θ6,0]Τ;A=[0,1,0,0;θ2θ1,θ3θ1,1θ1,0;0,0,0,0;0,0,0,-ks];E=[0,0;1,0;0,0;0,1]Τ;C=[1,0,0,1;0,1,0,0;0,0,1,0];g0(x(t))=[0,0,f4(x3(t)),0]Τ;g1(x(t))=[0;θ4θ1Fm1(x2(t))+θ5θ1Fm2(x2(t));θ7f2(x1(t),x2(t))+θ8[f3(x1(t),x3(t))];0]。
假設g(x)和g0(x)是非線性函數,且滿足Lipschitz 條件,即
式中:γ>0 和γ0>0 為常數。
使用估計值代替真實值θ9,設計NUIO:
定義NUIO 誤差為
現確定矩陣F、T、K、H,分為以下3 步:
步驟1為使(HC-I)Ed1(t)=0,矩陣H應滿足
由于rank(CE)=rank(E),式(21)解得
步驟2為消除非線性項g0(x(t))和輸入u(t),故取
步驟3令
由于系統((I-HC)A,C)可檢測,選取K1,以使F=(I-HC)A+K1C指數穩定;取K2=FH
則式(20)可改寫為
說明3在后續控制器設計中,NUIO 估計值x?1和傳感器測量真實值y1的切換,由閾值χ1[5]決定,輸出值xˉ1參與后續主動容錯控制器設計中。
在分析 NUIO 穩定性前,現說明若=0,則式(25)指數穩定,證明如下:
定理1假設=0 且|θ9|≤M(M>0)。假設存在對稱正定矩陣P,使得
式中:ι>0 為常數,則式(25)指數穩定。
證明見附錄A。由定理1 可知,本節NUIO的設計思路是:利用未知參數估計器(t)代替真實值θ9,使得參數誤差→0(t→∞),最終實現式(25)漸近收斂到0。
2.3 自適應魯棒積分容錯控制器設計
針對燃油控制系統動態方程(9),將積分魯棒控制和期望補償自適應控制相結合,設計新型容錯控制器。
步驟1設計虛擬控制。定義跟蹤誤差:
求導可得z?1=x2-x?1d。定義狀態x2虛擬控制:
定義跟蹤誤差:
式中:α2為x3的虛擬控制;k2為正反饋系數;s為輔助濾波函數以增加控制系統的設計自由度。
對式(31)中第2 式兩端同乘θ1并求導可得
故可設計虛擬控制α2為
式中:為自調節增益,滿足=r|s|;
其中:τs為采樣時間,輔助函數h(t)滿足
說明4 引入式(36)可避免使用加速度信號,以降低傳感器噪聲對系統控制性能的影響。
將式(33)代入式(32),則有
將式(9)代入式(37)中,可得:
式 中 :f2d=f2(x1d,x?1d);f3d=f3(x1d,x3);ξ3=θ7f2(x1,x2)-θ7f2(x1d,x2),ξ4=θ8f3(x1,x3)-θ8f3(x1d,x3)。
步驟2設計魯棒自適應控制器u
式中:k3為正反饋系數。由式(39)可知,魯棒自適應控制器u包含2 部分,分別為前饋模型補償項ua和線性魯棒控制項us。
在控制器(38)下,s滿足
式中:Θ2=f4(x3)。
在控制器(38)下,z3滿足
2.4 主要結論
定理2燃油控制系統動態方程(9)中同時非匹配擾動、傳感器故障和內泄漏故障,采用基于NUIO(18)和參數自適應律(B7)的主動容錯控制(38),并選取合適增益k1、k2、k3和ks,使矩陣Λ正定:
證明見附錄B。
3 仿真驗證
3.1 仿真設置
本文基于Vxworks 開發的Jetlab 平臺實時仿真系統[9],驗證所提出控制器的有效性,詳見圖3。其中,主機用于模型設計和仿真管理;目標機用于實現實時仿真;RapidForm 軟件用于仿真管理,包括狀態監視、仿真工程管理、代碼下載和操作管理等。采樣時間為1 ms。給定加力燃燒燃油控制系統足夠光滑可微的類正弦信號x1d=0.01arctan[sin( πt)][1-e-t] 0.078 4。設置非匹配擾動為f(t)=50arctan[sin(0.8πt)(1-e-t)];系統主要結構參數見表1,各控制器參數如下:

表1 燃油計量裝置主要結構參數Table 1 Main structural parameters of fuel metering unit
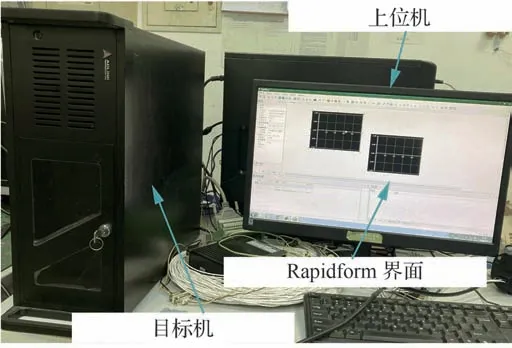
圖3 基于JetLab 的實時仿真測試平臺Fig.3 Real time simulation test platform based on JetLab
1) AIRFTC (Adaptive Integral Robust Fault Tolerant Control) based on NUIO,本文所提出的基于NUIO 的自適應積分魯棒容錯控制。系統未知參數初始值為θ0=4.0×10-9,參數自適應增益Γ=1×10-12。容錯控制器反饋增益為k1=200,k2=9 500,k3=2 000;ks=4 500,r=0.5。UINO設置如下:H=[0,0,0;0,1,0;0,0,0;1,0,0];T=[1,0,0,0;0,0,0,0;0,0,1,0;-1,0,0,0];K=[0,1,0;0,0,0;0,1,0;0,-1,0];F=[-5,0,-10,-5;-5,-10,0,-5;10,10,-10,-10;-5,0,0,-5]。
2) ARFTC (Adaptive Robust Fault Tolerant Control) based on UNIO,即 AIRFTC不含α2s3。
3) AFTC (Adaptive Fault Tolerant Control) based on UNIO,即基于NUIO 的傳統的自適應容錯控制。由式(9)計算控制律u和自適應函數τ:
4) VFPI(Velocity Feedforward Proportional Integral) control based on UNIO,即基于NUIO 的速度前饋PI 控制器:
式中:kp=5 000;kI=50;kF=30。
說明5通過AIRFTC、ARFTC 和AFTC與VFPI 對比,驗證非線性控制器的高效性與優越性;通過AIRFTC、ARFTC 與AFTC 對比,驗證AIRFTC 和ARFTC 處理傳感器測量噪聲和內泄漏故障的優越性;通過AIRFTC 與ARFTC對比,驗證AIRFTC 處理非匹配擾動的有效性。
本文采用最大跟蹤誤差Me、平均跟蹤誤差μe、跟蹤誤差的標準值σe、ITAE 和ITSE[20]評價各個主動容錯控制器的性能:
1) 用于評價跟蹤精度的Me可表示為
式中:N為所記錄誤差數字信號的數量。
2) 用于評價平均跟蹤性能的μe可表示為
3) 用于評價跟蹤誤差偏差水平的σe可表示為
4) 用于評價誤差收斂速度的ITAE 可表示為
5) 用于評價瞬態響應后期出現誤差偏離水平的ITSE 可表示為
3.2 傳感器故障
當系統于t=10 s 時,線性位移傳感器發生故障。設置線性傳感器故障參數如下:ksf=0.5,ζ=0.01+0.005sin(πt),閾值為χ1=0.003。
本方案主要分析NUIO 對傳感器故障處理的性能,主控制器仍采用AIRFTC。由圖4(a)可知,NUIO 可有效估計系統狀態和故障,且不受內泄漏故障和非匹配擾動影響。如圖4(b)所示,系統于t=10.28 s 時,傳感器故障估計值x?4≥χ1,故障標志Im1報警。特別地,如圖4(a)和圖4(c)所示,當傳感器故障時,即傳感器反饋信號y1偏離期望軌跡x1d,NUIO 介入,使位移估計值x?1取代實際測量值y1參與AIRFTC 設計,即=x?1。
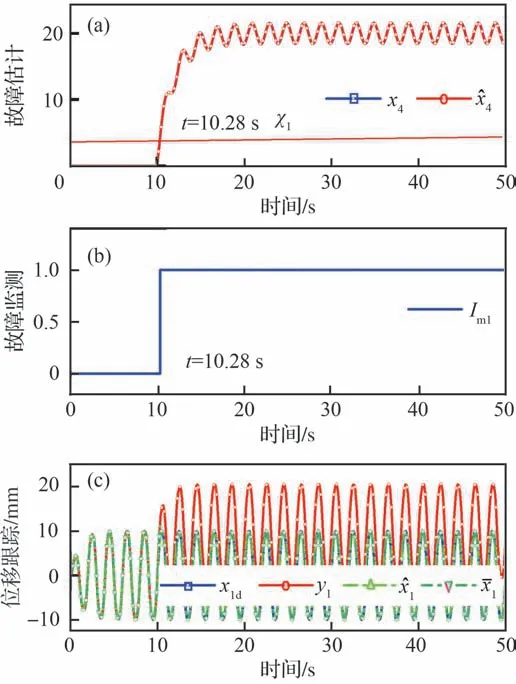
圖4 傳感器故障下的狀態監測與位移跟蹤Fig.4 Status monitoring and tracking under sensor failure
在圖5 中,y1NUIO、e1NUIO和uNUIO分別代表基于NUIO 的AIRFTC 的位移反饋、跟蹤誤差和輸入電壓。當x?4≥χ1時,激活NUIO,由x?1代替y1,使y1NUIO精確跟蹤x1d,降低跟蹤誤差;特別地,如圖5(c)所示,引入NUIO 并未增大輸入能量(u=uNUIO)。故可知該技術在提高控制精度的同時不增加控制成本。2 種方案性能指標見表2。
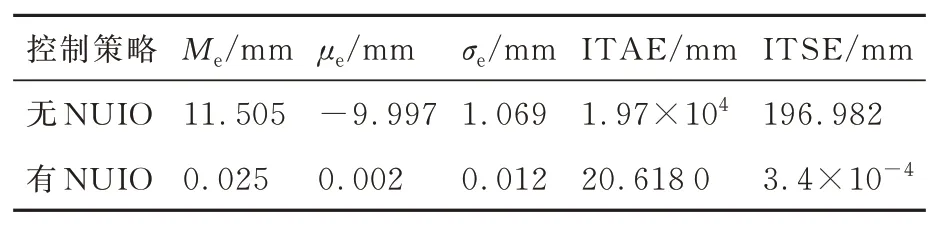
表2 傳感器故障模式下最后2 個周期的性能指標Table 2 Performance indicators for last two cycles under sensor failure
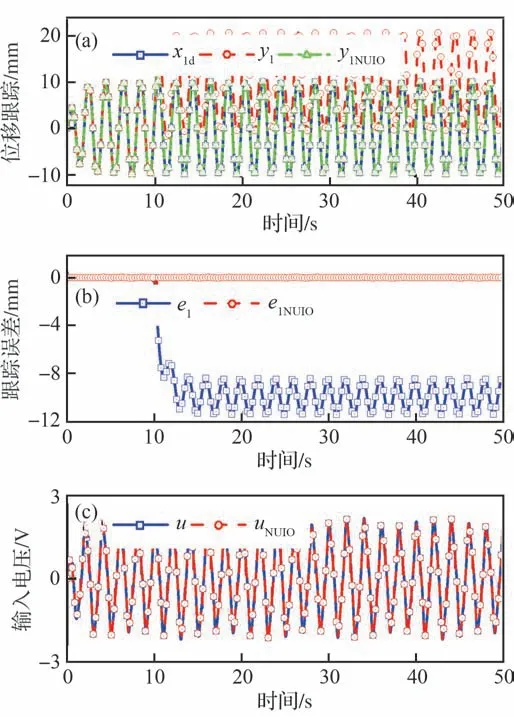
圖5 傳感器故障下NUIO 性能分析Fig.5 NUIO performance analysis under sensor failure
說明6傳統燃油計量裝置常采用雙冗余傳感器以提高系統可靠性。本節所提出的NUIO不僅可有效檢測傳感器故障狀態,確保系統在傳感器故障模式下正常運行,亦可減少傳感器數量,降低維護成本。在完善航空發動機健康管理的同時,亦提高燃油計量裝置的經濟性。
3.3 內泄漏故障
提高燃油泵出口壓力雖可有效增大出口流量進而提高戰斗機推重比和作戰性能,但在大流量大壓降的工況下,內泄漏故障則易使系統超負荷作業,進而造成無法估計的后果。本節所提出的AIRFTC 結構簡單,易于在實際系統中實現,可有效提高系統容錯性和經濟性。其主要特點如下:當系統無故障時,系統可滿足所規定的性能指標;當系統發生輕微泄漏時,故障無需報警,由正常魯棒控制器覆蓋該故障,并使系統滿足所規定的性能指標;當系統發生嚴重內泄漏和早期內泄漏時,故障報警,激活容錯控制器,以補償內泄漏對系統的影響,從而恢復系統控制性能。
本文所提出的AIRFTC 可視內泄漏為系統參數變化,只需改變正常魯棒控制器中的參數,故其結構簡單且易于實現。學習過程基于在線監測的PE 條件進行操作,可確保參數自適應的良好收斂性。FTC 控制器激活后,系統性能逐漸恢復。
1) 嚴重內泄漏故障。結合圖6 和圖7,當t=30 s 時,內泄漏故障θ?9≥χ2,故障標志Im2報警,AIRFTC 激活,進行擾動補償。圖7(a)顯示輸入能量u增大,控制性能經2 s 后恢復。由圖7(b)可知,AFTC 和VFPI 在初始內泄漏下,控制性能不佳,當發生嚴重內泄漏故障時,性能衰退尤為顯著。圖7(c)顯示,與ARFTC 相比,AIRFTC在嚴重內泄漏故障發生時,系統超調較低,調節時間縮短,即表明:α2s3可有效處理非匹配擾動,無需增設觀測器。表3 證明上述結果的準確性。
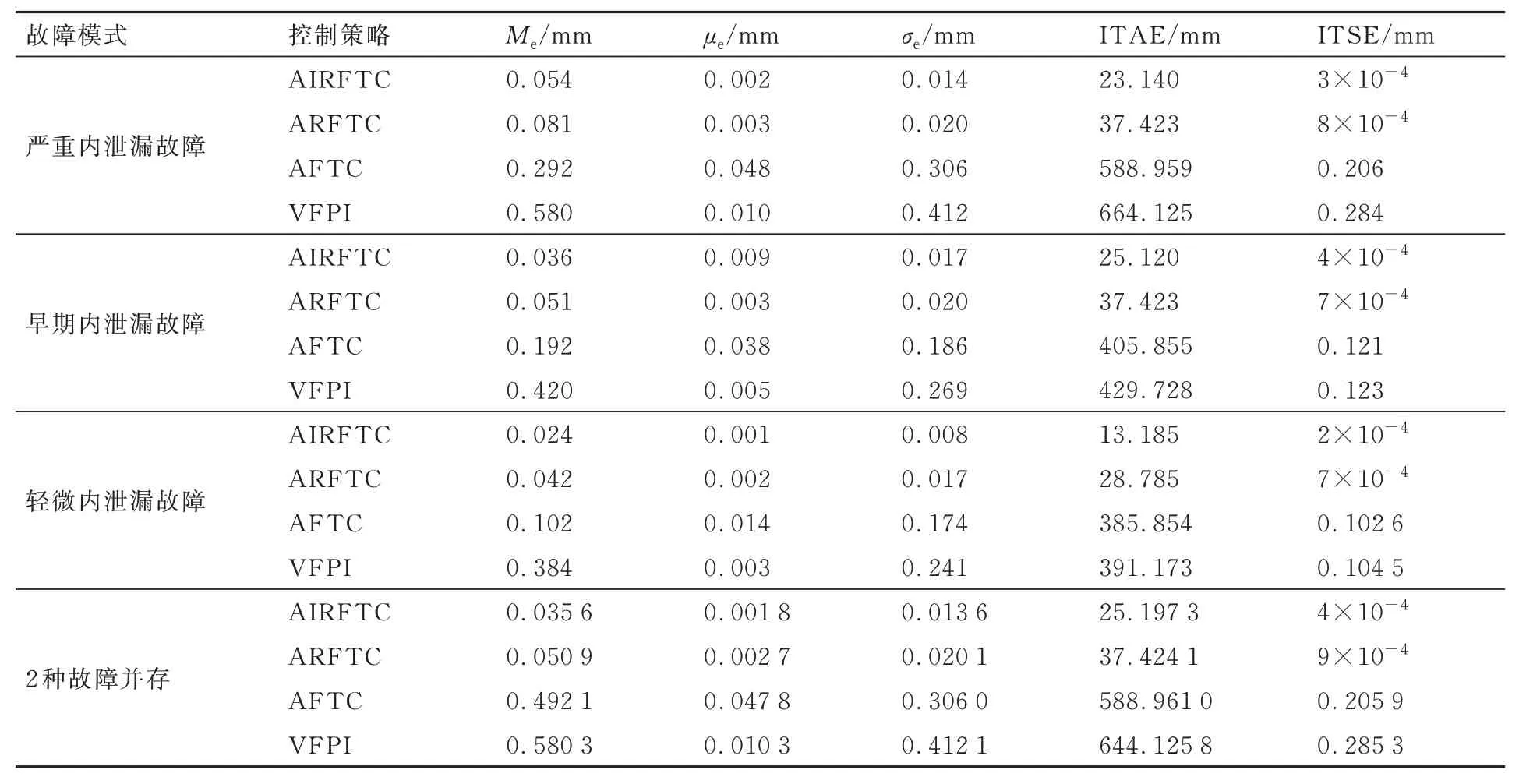
表3 最后2 個周期的性能指標Table 3 Performance indicators over last two cycles
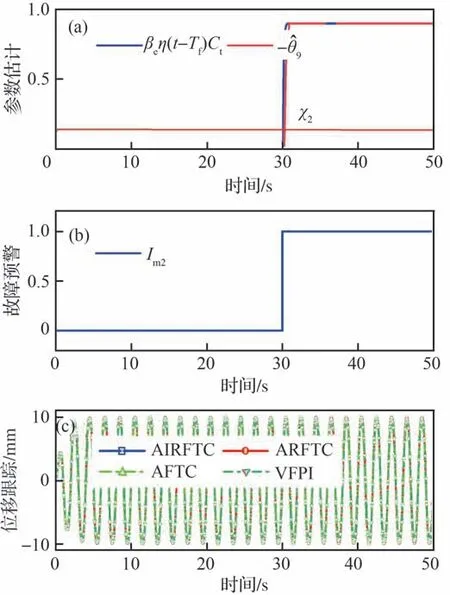
圖6 嚴重內泄漏下故障監測Fig.6 Fault monitoring under severe internal leakage
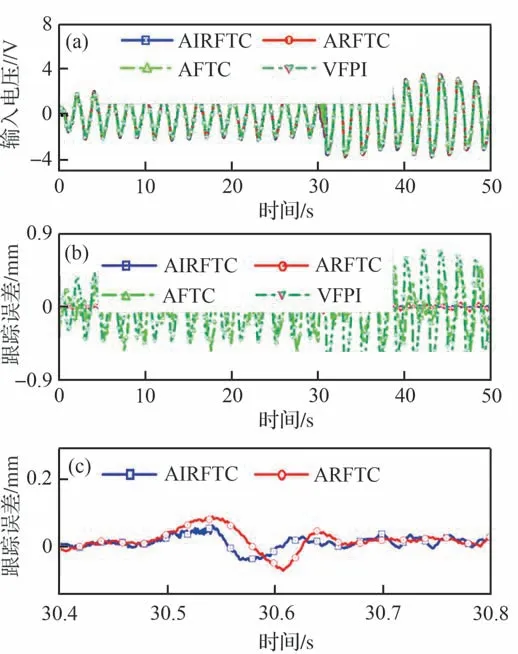
圖7 嚴重內泄漏下輸入電壓與跟蹤誤差Fig.7 Voltage and tracking error under severe internal leakage
2) 早期內泄漏故障。如圖8 和圖9 所示,系統于t=30 s,系統發生緩慢內泄漏故障。此時<χ2,內泄漏故障對控制性能影響較小,未觸發故障標志Im2,AIRFTC 將此視為擾動進行補償處理,并使系統滿足所規定的性能指標。當t=32.8 s 時≥χ2,故障標志Im2報警,AIRFTC 激活。由圖9(b)可知,AFTC 和VFPI 在初始內泄漏下,控制性能不佳,當發生早期內泄漏故障時,性能衰退亦為顯著。圖9(c)顯示與ARFTC 相比,AIRFTC 可獲得更好的跟蹤性能,即表明:α2s3可有效處理非匹配擾動,無需增設干擾觀測器。對比圖7(c)可知,AIRFTC 在處理早期內泄漏故障時,控制性能提升尤為顯著。表3 亦可有效證明上述結果的準確性。
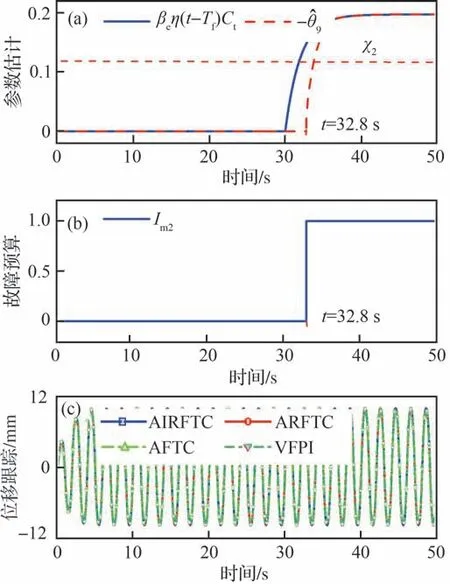
圖8 早期內泄漏下故障監測Fig.8 Fault monitoring under early internal leakage
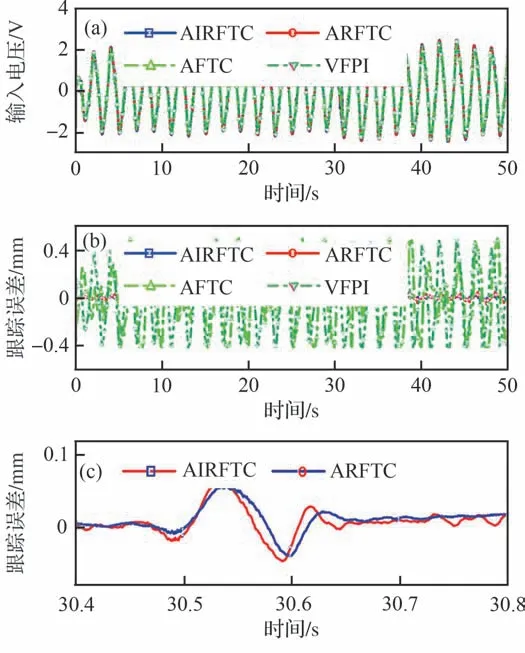
圖9 早期內泄漏下輸入電壓與跟蹤誤差Fig.9 Voltage and tracking error under early internal leakage
3) 輕微內泄漏故障。由圖10(a)和圖10(b)可知,此時內泄漏故障流量小于允許內泄漏最大值,即內泄漏故障程度小于閾值<χ2。此時系統未觸發故障標志Im2,所設計的正常魯棒控制器AIRFTC 將該故障視為模型不確定性進行擾動補償,故覆蓋該故障,并使系統滿足所規定的性能指標。如圖11(a)所示,因未激活參數自適應,故4 種控制器輸入電壓在輕微內泄漏故障發生前后維持不變,即輸入能力不變。由圖11(b)可知,AFTC 和VFPI 在初始內泄漏下,控制性能不佳,當發生輕微內泄漏故障時,性能表現依舊不佳。如圖11(c)所示,與ARFTC 相比,AIRFTC 在輕微內泄漏故障發生時,非線性魯棒項α2s3可有效處理系統中存在的較大非匹配擾動,加力燃燒燃油控制系統在超調量和調節時間等性能指標方面均獲得較好地改善。表3 可證明上述結果的準確性。
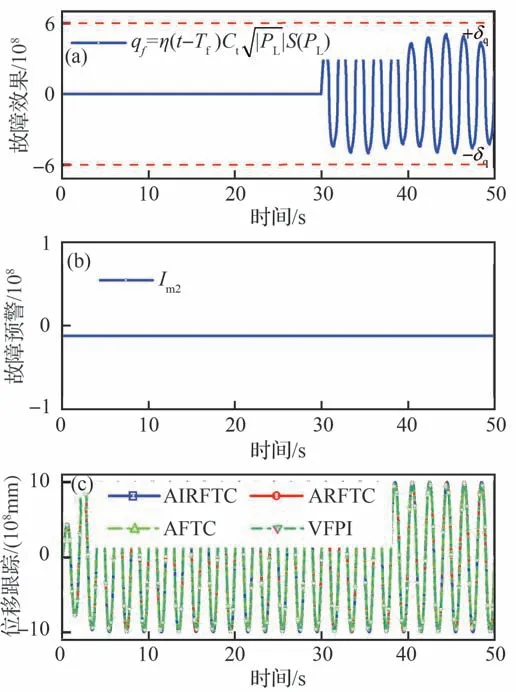
圖10 輕微內泄漏下故障監測Fig.10 Fault monitoring under slight internal leakage
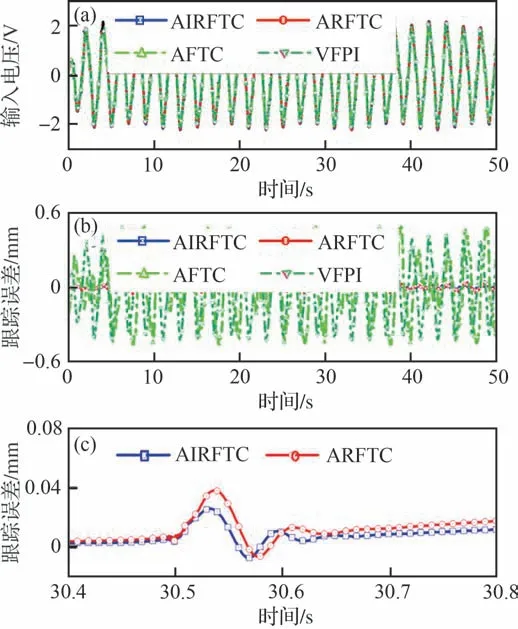
圖11 輕微內泄漏下輸入電壓與跟蹤誤差Fig.11 Voltage and tracking error under slight internal leakage
綜上所述,輕微故障容限的概念可能會在加力燃燒燃油控制系統性能和經濟性間做出權衡。
3.4 2 種故障并存
本節主要分析在非匹配擾動、傳感器故障和內泄漏故障并存的模式下,驗證基于NUIO 的AIRFTC 策略的優越性。
由圖12(a)和圖12(b)可知,所設計的AIRFTC 可有效估計傳感器故障x?4和嚴重內泄漏故障θ?9。由圖13(a)可知,t=10 s 時激活NUIO并未增加系統輸入電壓,t=30 s 時激活參數自適應律,AIRFTC 輸入電壓較其余3 種控制器較大,消耗能量較多。由圖13(b)可知,與其余3 種控制器相比,當傳感器故障發生時,AIRFTC 可有效減短調節時間。當嚴重內泄漏故障發生時,AIRFTC 在超調量、調節時間和穩態誤差方面均有較好的表現。表3 可證明上述結果的準確性。
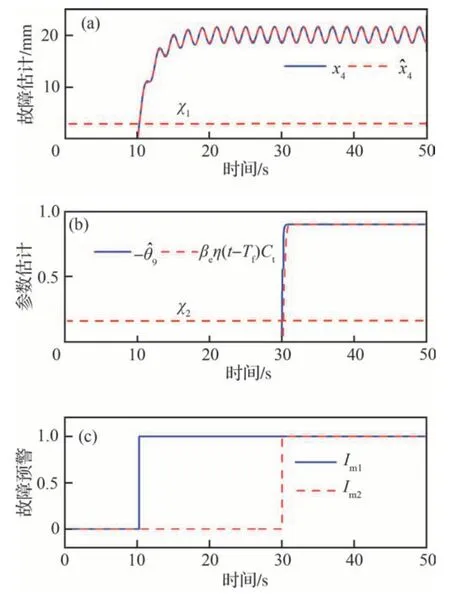
圖13 2 種故障并存下性能分析Fig.13 Performance analysis under whole faults
4 結 論
針對航空發動機加力燃油控制系統,提出了一種能同時處理非匹配擾動、傳感器故障和執行器故障的新型主動容錯控制策略,主要結論有:
1) 非線性未知輸入狀態觀測器NUIO 可以估計位移信號和傳感器故障,且不受內泄漏故障和非匹配擾動影響。
2) 通過濾波跟蹤誤差構造輔助函數,提出了基于積分魯棒控制和直接自適應控制的自適應積分魯棒容錯控制策略AIRFTC。仿真結果表明,在非匹配擾動、傳感器故障、內泄漏故障并存模式下,所提出的主動容錯控制在Me、μe、σe、ITAE 和ITSE 等性能上均有改善,分別降至0.035 6、0.001 8、0.013 6、25.197 3、4×10-4mm,即驗證AIRFTC 的有效性和高效性和經濟性。
3) 采用Lyapunov 理論,證明了基于NUIO的AIRFTC 策略可確保加力燃燒控制系統在多種故障模式下的漸近跟蹤性能。但AIRFTC 控制器在同時處理2 項及以上執行器故障時,目前尚不能證明NUIO 的穩定性和系統是否滿足PE條件,因此不能證明參數自適應的收斂性。后續作者將圍繞這個問題開展進一步的研究。
附錄A:
定理1 證明:定義式(25)的Lyapunov 函數為
對E(t)求導,可得
附錄B:
引理2ξi(i=1,2,3,4)滿足如下性質:
式中:ηi>0,i=1,2,3,4 為常數。
證明:根據中值定理,存在δ1∈(x?1d,x2),使得
引理3虛擬控制α2s3具有以下性質:
定理2 證明: 定義Lyapunov 函數為
對V(t)求導,并將式(30)~式(32)、式(39)、式(41)和式(A2)代入得
式中:?9和?10由式(41)給定。
當傳感器發生故障時,即。顯然設F=(F)ij,由式(25)得
為消除內泄漏對系統穩定性的影響,設計參數自適應函數:
由Young 不等式可得
則式(B5)可改寫為
由式(B9)可知,V∈L∞,系統變量z、s和x?有界,從而系統狀態x和狀態估計x?有界,進而所設計的容錯控制律u有界。同時該式顯示所提出的容錯控制器具有漸近穩定的收斂性能,即隨著t→∞,W→0,即z1→0。
猜你喜歡
工業設計(2022年8期)2022-09-09 07:43:20
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
汽車維修與保養(2019年7期)2020-01-06 03:30:42
裝備制造技術(2019年12期)2019-12-25 03:06:46
中國洗滌用品工業(2019年4期)2019-05-11 09:27:34
家庭影院技術(2017年9期)2017-09-26 03:41:45
汽車維護與修理(2016年10期)2016-07-10 08:17:41
汽車維修與保養(2015年12期)2015-04-18 07:51:49
汽車維修與保養(2015年6期)2015-04-17 03:31:50
