考慮環境適應性的海洋動態特征測繪方法
2023-09-06 14:37:48王文杰
環境技術 2023年7期
王文杰
(天津水運工程勘察設計院有限公司,天津 300000)
引言
海洋開發戰略實施過程中,不論是海洋經濟發展,還是海洋權益保護,都要依托于高精度的海洋動態地理特征信息[1],這就需要海洋測繪技術提供足夠的支持。海洋測繪是海洋開發的關鍵輔助工具[2],為了得到更加符合要求的海洋動態特征分析結果,必須結合現代化技術設計新型測繪方法。
文獻[3]從海洋測繪區域的地形特點入手,建立合適的三維激光掃描方案,獲取地形點和斷面點。并根據掃描數據,計算出地形點高程以及斷面面積,得到最終測繪結果。但實際應用結果表明,該方法作業精度較低。文獻[4]分別將工業相機搭載在無人機和無人船上,采集目標測繪區域的圖像,基于這些圖像建立數字高程模型和數字線劃圖,生成海洋動態特征測繪結果。但是結果表明,該方法測繪成本較高。文獻[5]采用水下激光線掃描設備,獲取海洋圖像。運用單通道閾值法和灰度重心法,對采集圖像提取激光光條,再結合三角位移估計法,獲取圖像包含的特征信息,根據這些特征建立測繪成果圖。但是,該方法作業效率較低。
由于上述文獻提出的方法在實際應用中總是存在不足之處,文中提出一種考慮環境適應性的新型測繪方法,該方法分析了海洋環境中相機性能受到的影響,并對相機主鏡結構進行優化,通過優化后的相機采集海洋動態圖像,基于這些圖像得到高質量的海洋動態特征測繪結果。
1 設計考慮環境適應性的海洋動態特征測繪方法
1.1 建立無人船海上導航技術
為了保證搭載在無人船上的相機可以采集海洋測繪區域的全方面圖像,文中建立一種POS MV 系統(慣性導航定位測量系統)。該系統融合了INS(慣性導航系統)與GNSS(全球導航衛星系統)的工作性能,可以實現無人船位置、方向和運行速度的同步更新[6]。而將兩個系統采集的角速度和加速度信息結合起來,應用卡爾曼濾波算法進行導航誤差校正,生成合理的航向解算結果,POS MV 系統的具體工作模式如圖1 所示。
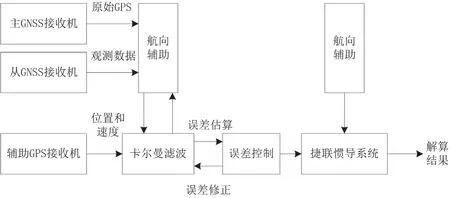
圖1 POS MV 系統工作模式
當POS MV 系統正常運行時,慣性導航系統和全球導航衛星系統采集數據可以互相驗證,但其中一個系統無法正常工作的情況下,只應用另一個系統也可以實現導航解算,避免無人船導航失效。
除此之外,無人船海上導航技術設計過程中,還添加了事后實時擴展技術,基于此實現GNSS 系統與衛星校正技術的廣泛融合,在動態狀況下,生成高精度的定位結果,作為后續導航方向解算的依據。
1.2 考慮環境適應性優化相機結構
按照上述導航路線運行無人船,通過無人船上搭載的相機可以實現海洋圖像的動態采集。但是采集海洋圖像時,往往需要相機處于水下環境,采用傳統的相機反射鏡結構,會使得海洋圖像變形嚴重,無法更好地體現海洋動態特征[7]。對此,本研究考慮環境適應性,采用水平集法對相機反射鏡結構進行參數優化,在不改變組件布局的情況下,調整各個部件的形狀和尺寸。
應用水平集法進行優化時,將拓撲結構邊界表示為水平集函數[8],當原始界面擴展為高一維空間后,水平集函數也隨機進行迭代演化,直到水平集呈現出平穩狀態,即可完成演化,得到形狀邊界。采用有限元網格函數方程代表邊界隱式,對于水平集函數來說,可以定義其對應的區域為:
式中:
x—有限元網格;
ψ—水平集函數;
δ—材料區域;
G—設計空間;
?—形狀邊界。
其中,水平集的動態變化,會引起形狀邊界的改變,具體數學方程為:
式中:
t—時刻;
V—敏感度變化速率;
?—梯度值。
通過水平集法的運算處理,得到清晰的拓撲邊界,以此來描述無人船搭載相機主鏡部件的復雜結構。在后續結構優化過程中,需要以最小光軸方向重力變形誤差為目標,進行主鏡的輕量化優化。通常情況下,無人船上搭載的相機主鏡均為中小型反射鏡,在海洋環境中,水下溫度的變化和重力加速度的改變,都會引起主鏡變形誤差。這種情況下,將考慮環境適應性的優化目標函數表示為公式(3)。
目標函數優化過程中,涉及很多項約束條件,具體表示為公式(4)。
式中:
y—優化后參數;
τ—密度;
e—單元;
n—海洋拍攝相機主鏡包含的單元總數;
R—均勻降溫后產生的面形誤差;
min—最小值;
—最大允許重量;
—優化后重量;
—重力沿光軸方向引起的面形誤差;
φ—允許的最大鏡面形誤差;
f1、f0—相機主鏡組件當前一階固有概率、最低一階固有概率;
K—結構剛度矩陣;
—材料重量矩陣;
U—位移向量;
U1、U2—重力、溫度載荷造成的位移向量;
P1、P2—重力、溫度載荷產生的向量值。
對上述優化目標函數進行求解后,得出優化后的相機主鏡參數,按照該參數調整后,保證相機采集的海洋圖像變形誤差更低。
1.3 設計海洋圖像增強處理方法
在海洋動態特征測繪之前,為了避免圖像中的噪聲信息影響測繪精度,提出一種基于同態濾波的圖像增強處理方法,改善圖像清晰度,并突出海洋圖像中包含的有效特征。
同態濾波處理過程中,結合了空域灰度變換原理和頻域濾波原理,建立照度-反射模型[9],基于此進行圖像亮度范圍的壓縮,實現對比度的提升。在不改變海洋圖像原貌的同時,增強圖像細節特征[10],直觀體現海底地貌單元邊界。正常情況下,海洋圖像包含前景區域和背景區域兩個部分,如公式(5)所示。
式中:
(c,z)—圖像中心坐標;
E—海洋圖像;
E1—圖像背景區域;
E2—圖像前景區域,這兩部分也分別集中在低頻區域、高頻區域。
具體的同態濾波處理,需要先針對原始圖像進行對數變換。
式中:
ln—對數函數。
采用傅里葉變換策略,對變換后的圖像進一步分析,明確各個圖像區域的頻域信息,頻域數學表達式如公式(7)所示。
式中:
D—頻域。
確定各個圖像部分的頻域后,定義一個頻域濾波器,對原始海洋圖像進行處理。再通過傅里葉反變換處理,得到空域對數圖像,計算出該圖像的指數后,即可完成空域同態濾波。
同態濾波器是同態濾波算法實現的關鍵,其本質是對壓制高頻區域并增強高頻區域,實現背景區域與 邊界域的明顯區分。同態濾波器的工作模式與高通濾波器相同,只能壓制低頻區域而不能完全消除低頻分量。因此,將同態濾波器數學形式表示為:
式中:
(a,b) —區域像素坐標;
H—同態濾波函數;
η—高頻增益;
μ—低頻增益;
H′—高通濾波函數。
實際操作過程中,當高頻增益大于零而低頻增益小于零時,就實現了背景區域的抑制。具體計算過程中,將高斯濾波函數表示為高斯高通濾波器數學函數,則得到公式(9)。
式中:
ε—常數;
D0—截止頻率;
D—濾波器中心與圖像像素點之間的距離。
按照上述操作進行同態濾波處理時,其同態濾波器幅頻曲線如圖2 所示,從中可以看出,濾波器函數是由低到高不斷過渡的。

圖2 同態濾波器幅頻曲線示意圖
對采集的海洋圖像進行同態濾波增強處理后,圖像內邊界區域表現為更深的顏色,與其他區域明顯區分出來,作為后續海洋動態特征測繪三維成果圖建立的依據。
1.4 生成可視化海洋動態特征測繪成果
根據增強后的圖像,提取不同海洋區域的空間位置和高程數據,作為基本測繪數據,經過簡化處理后導入計算機操作軟件內,通過層次細節技術處理測繪數據,構建可視化三維測繪場景,并在該場景中細節化體現海洋動態特征。本文應用了層次細節技術后,將海洋場景中不同的對象按照不同的分辨率構建出來,模擬人眼觀察特點,當視點變遠時測繪場景中的海洋動態特征變得模糊,而視點的縮小可以幫助人們觀察更多的細節特征信息。
此外,在生成可視化海洋動態特征測繪成果圖時,還應用了可視化漫游技術,人們通過控制視點的改變,合理刷新三維海洋動態特征測繪場景中的數據。同時,在展示測繪結果時,建立了緩存機制和多線程機制,高效實現海洋動態特征測繪數據的動態加載與合理調度,根據用戶視點實時變化情況,判斷當前服務區測繪數據加載范圍,運用這些數據生成更新后的三維可視化測繪場景。
2 應用分析
2.1 區域概況
在完成考慮環境適應性的測繪方法設計完成后,為了展示該方法的應用效果,以位于瓊州海峽東口的某一淺海區域為例,進行海洋動態特征測繪方法應用分析。通過實地考察可以發現,該研究區域是潮流沙脊區,水下地形較為復雜,且區域內存在較粗的松散沉積物,屬于海砂資源富集區域。本次應用分析針對的研究區,總面積約為35 km2。
采用無人船搭載相機的方式獲取該區域圖像,定義相鄰測線間距在(200~300)m 之間,并在無人船上安裝慣性導航系統和全球衛星導航系統,實現無人機行駛路徑的導航。搭載工業相機的無人船海洋探測原理,如圖3 所示。
按照圖3 所示的探測原理,隨著無人船的運行動態采集不同區域的海洋圖像,并將采集圖像實時傳遞給地面基站。
2.2 相機參數優化
為了得到高質量的海洋圖像,按照文中研究內容,在考慮環境自適應性的基礎上,進行相機主鏡優化。從主鏡和柔性鉸鏈入手,這兩個相機關鍵部件分別存在12 個變量參數、6個變量參數。針對這些參數進行有效調整,可以使得相機在水下環境中采集的圖像存在更小的變形誤差。在完成32 次迭代更新后,多個響應函數都達到最優收斂效果,此時優化值即為最終優化結果。經過統計可知,相機主鏡、柔性鉸鏈參數優化結果,如表1 所示。
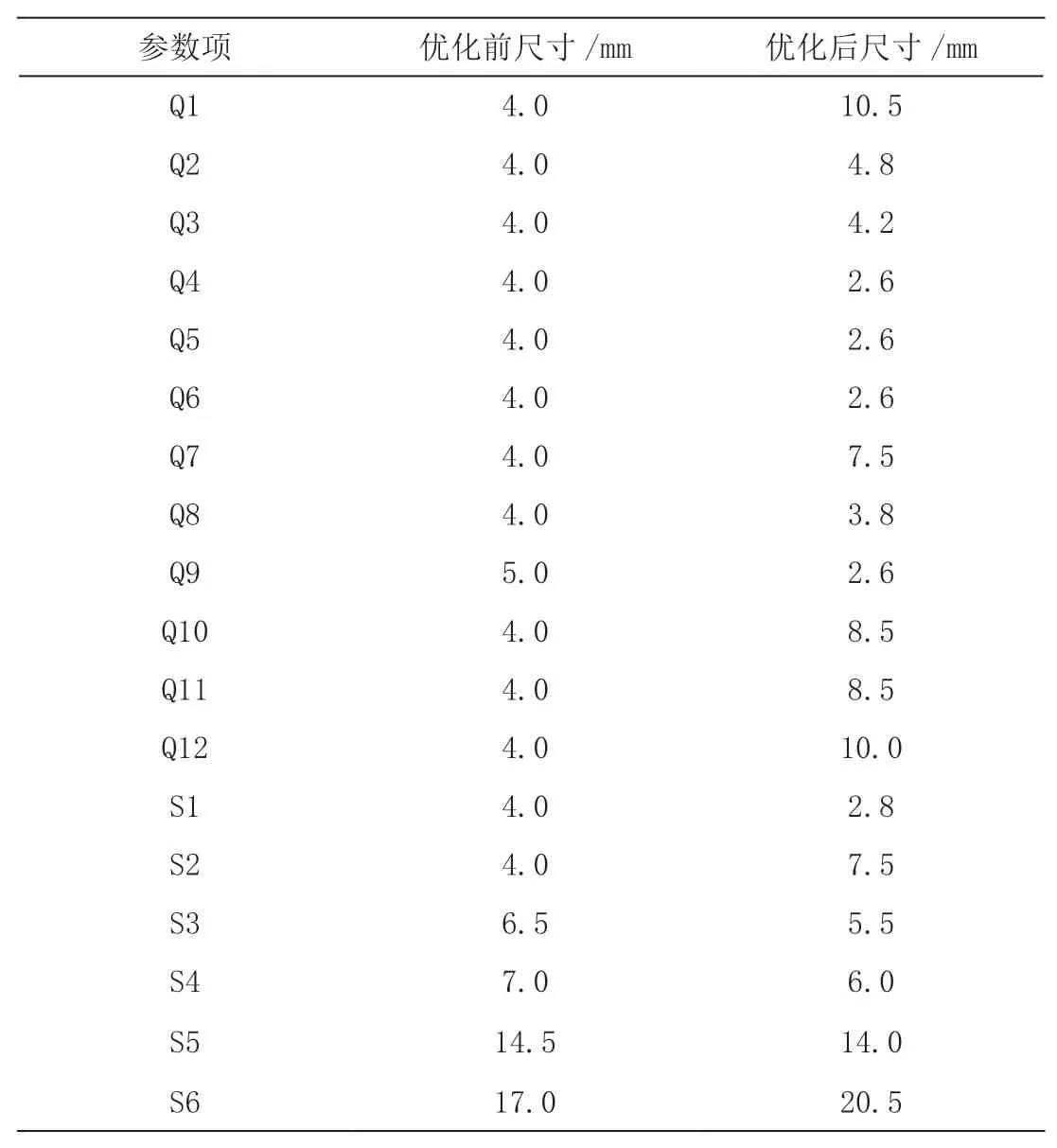
表1 相機主鏡、柔性鉸鏈參數優化結果
按照表1 所示的參數進行相機結構優化,將優化后的相機安裝到無人船上,進行海洋的采集。經過統計可知,最終采集125 674 張圖像,均不存在明顯的變形和模糊情況,可以作為測繪分析的依據。
2.3 測繪結果展示
針對實驗采集圖像進行增強處理后,提取圖像包含的特征信息,并基于此建立三維測繪成果模型,如圖4(a)所示。從中可以看出,該海域地形存在東西走向大沙壩,且區域水深等線如圖4(b)所示,從該圖中進一步體現了海洋地形總特征。
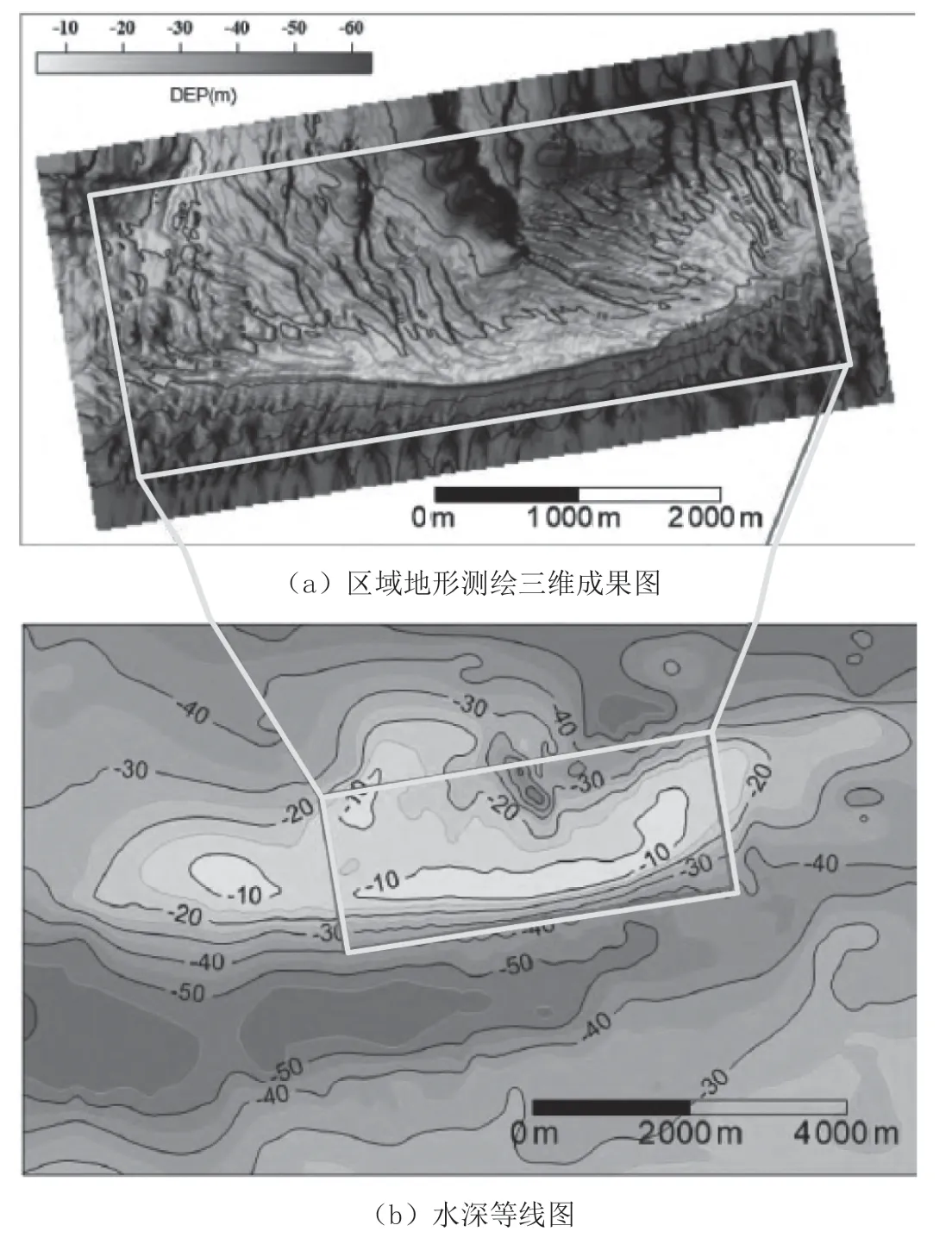
圖4 研究區域動態特征測繪結果
從圖4(b)可以看出,該測繪區域的南北兩側水較深,中間區域水較淺,甚至小于10 m,表明大沙壩或沙脊大概存在于中部地區,且從中間向四周水深等線分布均勻,表明該沙脊坡度較緩。此外,該區域中部潛水區域呈現東西走向,并向北部不斷發展,這也體現出海洋下大沙壩或沙脊的具體走向。
上述測繪結果表明,應用本文設計方法可以呈現出區域海洋動態特征,表明考慮環境適應性的測繪方法具有可行性。
2.4 測繪高程誤差分析
為了進一步體現本文設計測繪方法的有效性,從測繪高程誤差入手,驗證測繪結果的準確性。在整個研究區域,分別選擇11 個檢查點,分別采用全站儀測量,實際測量檢查點的高程數據,作為高程誤差分析的依據。將所提方法測繪結果顯示的高程數據圖實際測量數據進行對比,計算出高程誤差。而后,應用文獻[3]、文獻[4]提出方法對研究區進行測繪分析,從各自的測繪結果中,同樣獲取各個檢查點的高程數據,對比實際測量值計算高程誤差。為了便于分析,將三種方法的高程誤差計算結果體現在一張圖中,生成圖5 所示的對比結果。
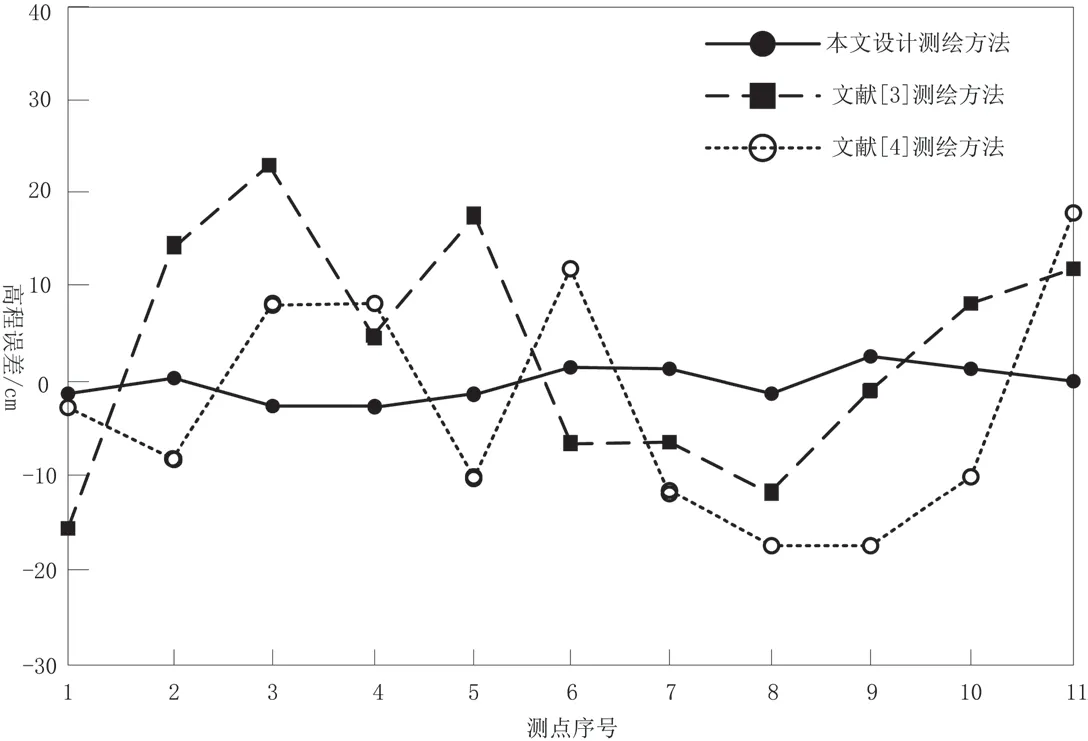
圖5 不同方法測繪結果高程誤差對比
根據圖5 可知,文中設計方法的測繪結果高程誤差在3 cm 之內,而其他兩種文獻提出方法的測繪結果,顯示高程誤差分別在18 cm、20 cm 以內。綜上所述,考慮環境適應性對海洋攝影相機進行主鏡結構優化后,可以得到質量更高的海洋圖像,應用這些圖像生成的海洋動態特征測繪結果更加貼合實際情況,其高程誤差明顯低于文獻提出方法。
3 結束語
隨著人們對海洋開發越來越重視,海洋測繪技術的優化成為研究人員急需突破的重點項目。通過海洋動態特征測繪,可以直接反映海洋區域的地理特征,作為后續海洋開發計劃設計的基礎。尤其在無人技術應用到海洋測繪領域后,突破了傳統海洋測繪限制,可以在現代化技術的輔助下,得到精準的測繪信息。上述實驗驗證結果,也體現了本文設計測繪方法的優越性,將其應用到現代海洋測繪工作中,可以發揮更好的應用效果,為了后續海洋開發提供地理信息支持。
猜你喜歡
瘋狂英語·新策略(2019年10期)2019-12-13 08:43:28
浙江國土資源(2019年10期)2019-10-31 03:17:00
建材發展導向(2019年10期)2019-08-24 06:25:28
當代陜西(2019年10期)2019-06-03 10:12:04
中國公共安全(2017年7期)2017-10-13 08:18:11
數學小靈通·3-4年級(2017年9期)2017-10-13 08:10:54
電子制作(2017年9期)2017-04-17 03:01:00
中國科技博覽(2016年2期)2016-04-25 20:32:39
小學生導刊(2016年34期)2016-04-11 00:49:44
電測與儀表(2015年5期)2015-04-09 11:30:52