旋耕刀齒式棉田耕層殘膜回收機設計與試驗
2023-09-07 13:02:08王旭峰邢劍飛郭文松
中國農業大學學報 2023年10期
關鍵詞:作業
胡 燦 杜 鏊 王旭峰 邢劍飛 郭文松 王 龍
(1.塔里木大學 機械電氣化工程學院,新疆 阿拉爾 843300;2.中國農業大學 工學院,北京 100083;3.新疆維吾爾自治區普通高等學校現代農業工程重點實驗室,新疆 阿拉爾 843300)
地膜覆蓋是一種簡單且經濟的農業技術,具有增溫保墑,提高土壤對作物生長的養分供應和水分利用效率,以及抑制雜草生長等特點,為全球干旱地區農業生產帶來了安全保障[1-2]。我國西北干旱地區,地膜技術的應用使得農作物產量和水分利用率分別提高了45.50%和58.00%[3]。新疆棉花覆膜種植區,棉田采取連續多年覆膜種植方式,給當地棉花生產帶來了極大收益。然而,長期地膜覆蓋造成了農田殘膜污染,影響了農田生態環境與土壤質量[1,4-5],在可控條件下實現殘膜的有效回收是降低殘膜污染的關鍵。
地膜回收可分為當季地膜回收和耕層殘膜回收2種[6-7]。當季地膜定義為當年覆蓋地膜經過1個耕作期后進行回收的殘留地膜;耕層殘膜回收定義為當季地膜未能回收完全,導致多年積累殘留在土壤中的地膜碎片,當積累到一定殘膜量后,對播種、作物生長有極大影響,需要進行機械化清理修復。在現有的地膜回收技術中,針對當季地膜回收作業機械的研發較多,以彈齒式為主[8],殘膜回收率約為80.00%~90.00%[9]。在棉花覆膜種植農田中,覆膜量一般為82.50 kg/hm2,回收后每年的地膜殘留量約為8.25~16.50 kg/hm2。連續覆膜種植一定年限后,土壤中殘膜存量增加,影響作物生長、土壤生態以及播種耕地等機具作業,需要一種能實現耕層殘膜回收的機具,以減少耕層土壤中殘膜的存量,修復土壤結構,改善作物生長環境;技術發達國家采用的地膜厚度標準更高,力學性能較好[10],易于機械回收[11]。李貴春等[12]研制了針對于耕層殘膜回收的齒鏈式殘膜回收機,機具生產率0.47 hm2/h,殘膜收凈率≥85.00%。郭文松等[13]研究設計了一種梳齒起膜氣力脫膜式耕層殘膜回收機,拾凈率平均值為55.04%。耕層殘膜的機械化回收是一種土壤修復技術,需要將土壤中殘膜碎片進行力學分離,作業難度大。
本研究擬采用基于膜土拋送分離輸送的旋耕刀齒式起膜方法,對土壤耕層中的殘膜進行分離回收;設計研制起膜回收整機系統,以期解決傳統篩分式起膜作業方式效率低、回收效果差的問題,為農田土壤殘膜污染治理提供技術支持與理論參考。
1 旋耕刀齒式棉田耕層殘膜回收機設計方案
1.1 整體結構
根據農田殘膜與播前土壤特點,本研究設計一種旋耕入土、刀齒旋轉起膜、膜土篩分回收的旋耕刀齒式棉田耕層殘膜回收機,即先將土壤松土,再用刀齒旋轉起膜,刀齒碎土通過篩網分離。旋耕刀齒式棉田耕層殘膜回收機主要由旋耕刀齒起膜裝置、輸送篩分裝置、卸膜裝置、碎土輥、限深輥、鎮壓輥裝置、集膜箱和機架等部件組成。
旋耕刀齒起膜裝置入土起膜,將殘膜碎片從土壤中分離,再通過旋轉帶動膜土拋送至輸送篩網,輸送篩網設置一定的傾角,經篩孔作用使土塊掉落,實現膜土二次分離;輸送篩網上端裝有碎土輥,與輸送篩網之間限定孔隙間距,將大于限孔的土塊等田間雜物壓碎,由輸送篩網再次篩分碎土;最后,篩分后的干凈碎膜被傳送至集膜裝置內,實現殘膜回收。機具前端安裝有限深輥,限深調節器可以調節入土深度,以保證機具作業時的最優作業深度。另外,機具后端安裝有鎮壓輥,用于旋耕起膜后虛土的壓實,利于春耕播種培墑作業。旋耕刀齒式棉田耕層殘膜回收機結構示意圖見圖1。
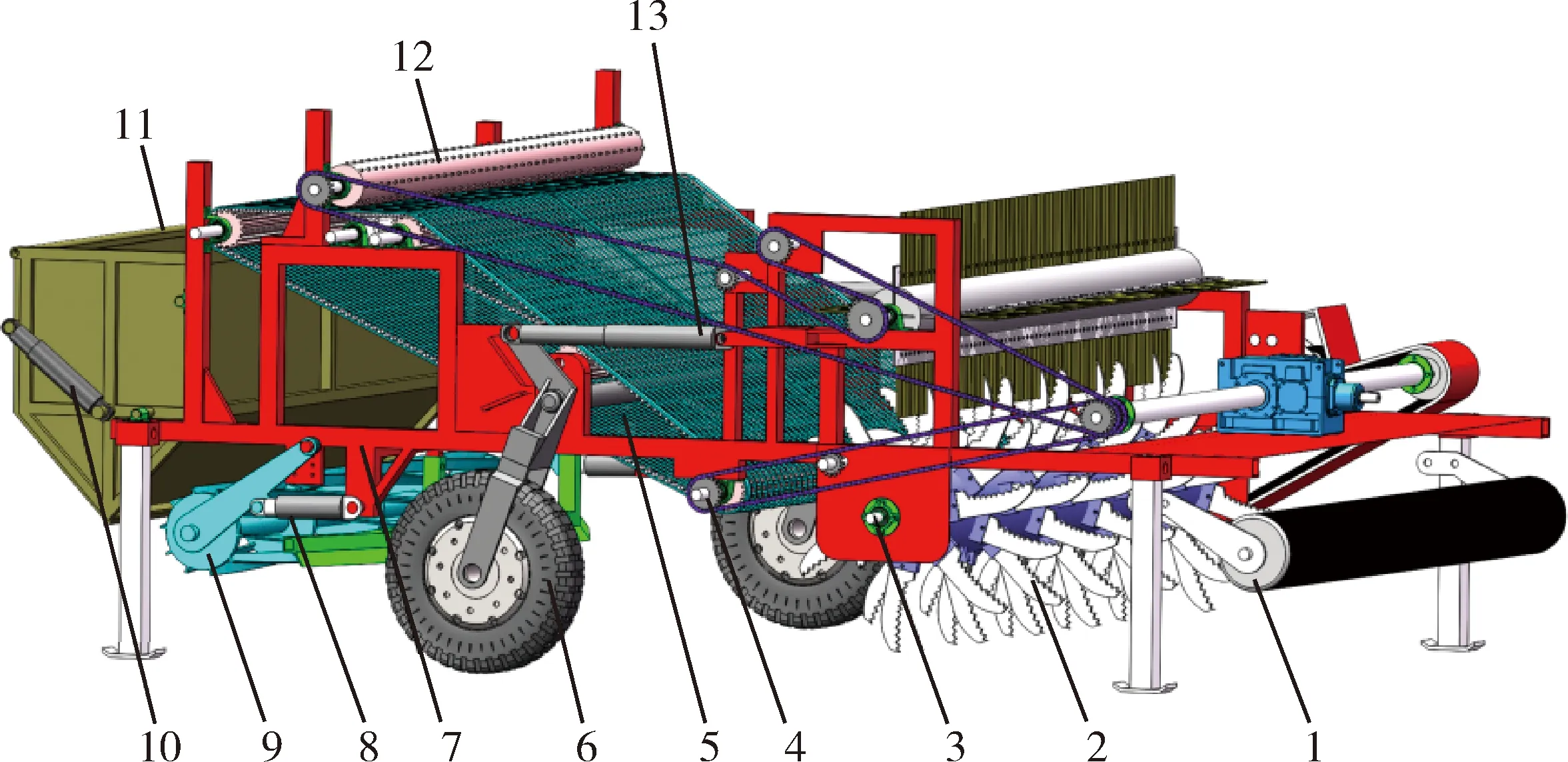
1.限深輥;2.旋耕刀齒起膜裝置;3.旋轉輥;4.篩分鏈輪;5.輸送篩網;6.行走輪;7.機架;8.液壓推桿;9.鎮壓輥裝置;10.卸膜推桿;11.集膜箱;12.碎土輥;13.行走輪推桿1.Depth limiting roll; 2.Rotary tillage knife tooth film lifting device; 3.Rotary roll; 4.Screening sprocket; 5.Conveying screen; 6.Walking wheel; 7.Frame; 8.Hydraulic push rod; 9.Press roll device; 10.Film unloading push rod; 11.Collecting box; 12.Soil breaker roll; 13.Walking wheel push rod圖1 旋耕刀齒式棉田耕層殘膜回收機結構示意圖Fig.1 Schematic diagram of rotary tillage knife tooth type cotton field plough layer residual film recovery machine
1.2 設計參數
新疆土壤以沙壤土為主,棉田采用平作模式,耕作層為0~300 mm,種床0~80 mm,棉花種植主要采用一膜六行模式。由于一膜六行模式中的地膜寬度為2 000 mm,故設計機具作業幅寬為2.21 m;考慮作業動力與土壤種床修復深度,設計作業耕深為100~200 mm,可調;配套動力取值≥75 kW;作業速度為3~7 km/h,可調;考慮耕層殘膜回收作業難度,設計殘膜回收率≥60%,具體旋耕刀齒式棉田耕層殘膜回收機設計參數見表1。
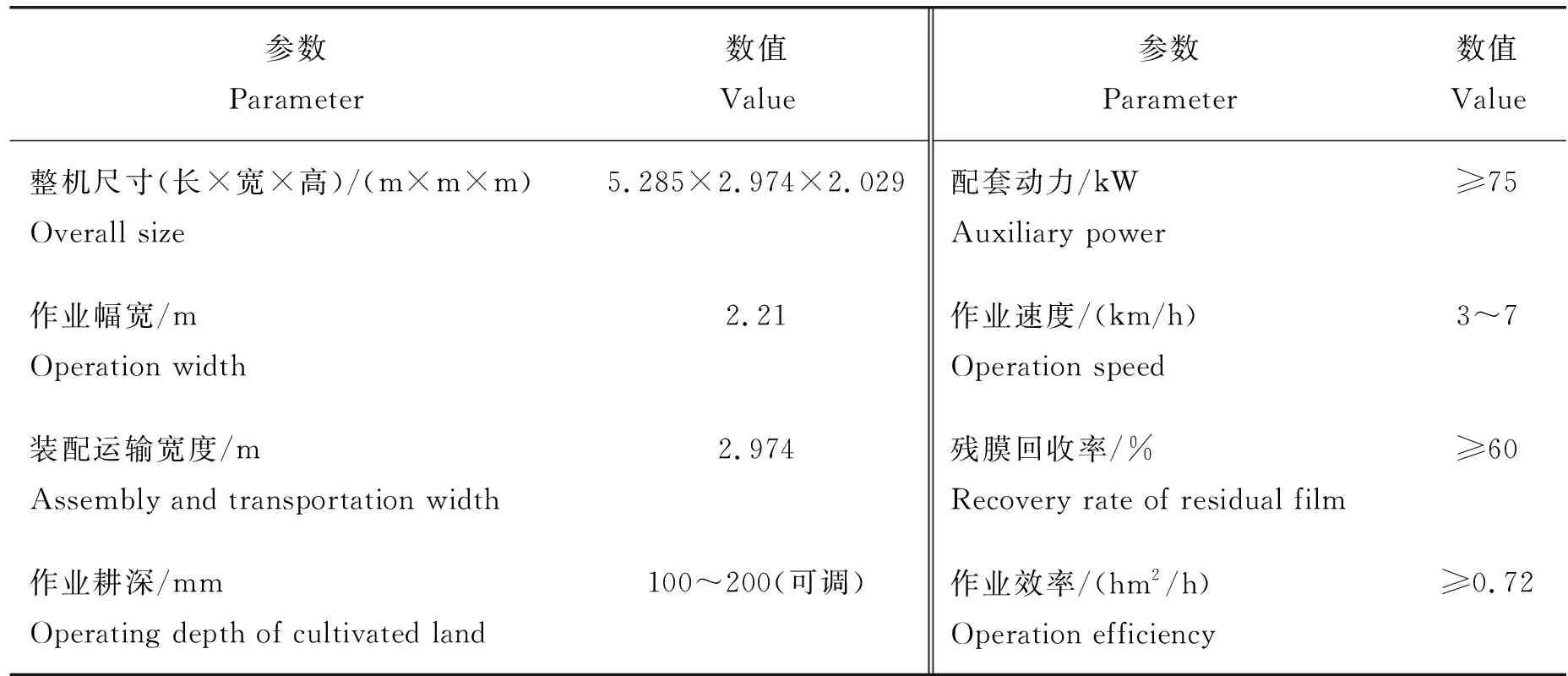
表1 旋耕刀齒式棉田耕層殘膜回收機設計參數Table 1 Design parameters of rotary tillage knife tooth type cotton field plough layer residual film recovery machine
2 旋耕刀齒式棉田耕層殘膜回收機關鍵部件設計
2.1 旋耕刀齒起膜裝置
旋耕刀齒起膜裝置是機具核心工作部件,由旋轉輥和刀齒組成(圖2)。
1)旋轉輥。旋轉輥設計長度為2 210 mm,采用空心管徑結構,材料為45號鋼,內徑為190 mm,外徑200 mm,設計旋轉速度最高為300 r/min,實際旋耕轉速120~160 r/min。
2)刀齒。按照作業要求,設計采用刀齒總齒數為72個,刀齒入土深度200 mm,則刀齒長度設計為278 mm,厚度8 mm,入土齒端為鋸齒分布,鋸齒齒牙為20 mm,以便于地膜勾掛拋送。
3)刀齒排列方式。刀齒排列采用螺旋排列方式,以減小旋轉軸扭矩以及牽引阻力。直列式刀齒排列工作時,刀齒入土順序相同,切土角間距一致,影響旋轉軸向作用力及旋轉軸旋扭,且易形成涌土,增加牽引阻力,增大作業功耗。因此,設計采用圓柱螺旋式排列,使刀齒按標準圓柱螺旋線方程排列。
根據圓柱螺旋線方程公式[14],結合旋耕式旋轉原理[15],建立圓柱螺旋線方程為:

(1)
式中:r為旋轉輥外圓半徑,mm;S為螺旋導程,即為螺旋起點沿螺旋線繞圓柱一周的距離,mm;β為螺旋轉角,由式(2)確定:
(2)
旋轉輥圓柱體表面刀齒數為72個,按雙螺旋排列,旋轉輥外圓半徑r=100 mm,將r=100 mm代入式(2)和(3),可計算出x、y值,以及S=1 087 mm,β=60°。
根據圓柱螺旋線方程及參數,設計2條刀齒圓柱螺旋線排列,則垂直于軸向同一旋轉平面內齒數為2個,兩刀齒相隔180°;縱向刀齒數設計為72把,相鄰刀齒間距20°。起膜刀齒縱向每排刀齒數為4個,即同時旋轉入土作業時的刀齒數為4個。
2.2 輸送篩分裝置
輸送篩分裝置是將旋耕起膜拋起后的殘膜與部分碎土進行分離輸送的裝置[16]。輸送篩分裝置內部設置輸送篩網,通過鏈輪帶動旋轉,上端安裝有碎土輥,較小的土塊通過輸送篩網與殘膜分離,大土塊通過碎土輥壓碎后再次篩分,完成殘膜的輸送回收。輸送篩網輸送殘膜土塊時的傳動力F應滿足:
F≥fkc+mkcgsinθw
(3)
式中:fkc為殘膜土塊運動至輸送篩網后受到的沿篩輸送網向下的摩擦力,N;mkc為殘膜與土塊的總質量,kg;θw為輸送篩網傾角,(°),θw與膜土分離效果相關,25°~45°范圍內可調,θw最優值需田間作業試驗確定。
1)整體結構。輸送篩分裝置由輸送篩網、輸送輥、輸送傾角調節輥、集膜箱、碎土輥和旋耕刀齒起膜裝置組成(圖3)。輸送篩網由鉚釘式鏈網組成,篩網間隙邊長<2 mm,細小土塊可由篩網過濾,殘膜則輸送至集膜箱內;輸送輥由鏈輪帶動,提供輸送動力;輸送傾角調節輥可以調節輸送篩網的傾角,以達到最佳殘膜分離效果。輸送篩網寬度設計與旋耕刀齒起膜裝置一致,為2 110 mm,初始輸膜傾角為35°,鏈條總長度設計為4 400 mm。
1.輸送輥;2.輸送篩網;3.輸送傾角調節輥;4.集膜箱;5.碎土輥;6.旋耕刀齒起膜裝置1.Conveying roller; 2.Conveying screen; 3.Conveyor inclination adjusting roll; 4.Membrane collecting tank; 5.Soil breaker roll; 6.Rotary tillage knife tooth film lifting device圖3 輸送篩分裝置示意圖Fig.3 Schematic diagram of conveying and screening device
2)碎土輥。為防止未完全分離的土塊進入集膜箱內,在輸送篩網上端設置隨動式碎土輥。碎土輥位于輸送篩網上端,與篩網間隙設計為3~5 mm。具體工作時,碎土輥逆時鐘旋轉,輸送篩網在鏈輪帶動下向集膜箱輸送,碎土輥與篩網間隙為碎土直徑,當土塊直徑小于碎土直徑時,通過篩網過濾至田間;當土塊直徑大于碎土直徑時,土塊則被碎土輥碾碎,與殘膜分離再次以篩網過濾。
3 膜土分離運動過程分析
旋耕刀齒起膜過程是刀齒旋轉和向前行進2個運動過程的疊加。旋耕起膜作業時,順時針方向旋轉,將土壤松土,使土壤與殘膜發生第一次分離;旋轉動力作用下,刀齒帶動殘膜與部分土塊向輸送篩網拋送,利用殘膜與土壤質量差異,兩者被拋送至輸送篩網上的位置不同,使膜土發生第二次分離;最終,土塊撞擊輸送篩網后變成碎土過濾至田間,殘膜則通過輸送篩網回收。
起膜回收運動過程見圖4。起膜裝置以ωq,1旋耕作業,卸膜裝置以ωq,2順時針旋轉,將刀齒上殘膜刷落,殘膜及土塊以不同的速度被拋送至輸送篩網上,土塊經篩網落回地面,殘膜經篩網輸送回收。另外,碎土輥逆時針旋轉,與輸送篩分裝置間距為H1,以限制大土塊進入殘膜回收箱內。起膜裝置與輸送篩網間距為L1,在滿足旋轉刀齒作業空間條件下,L1應確保殘膜拋送后輸送篩網的最小篩分間隙。
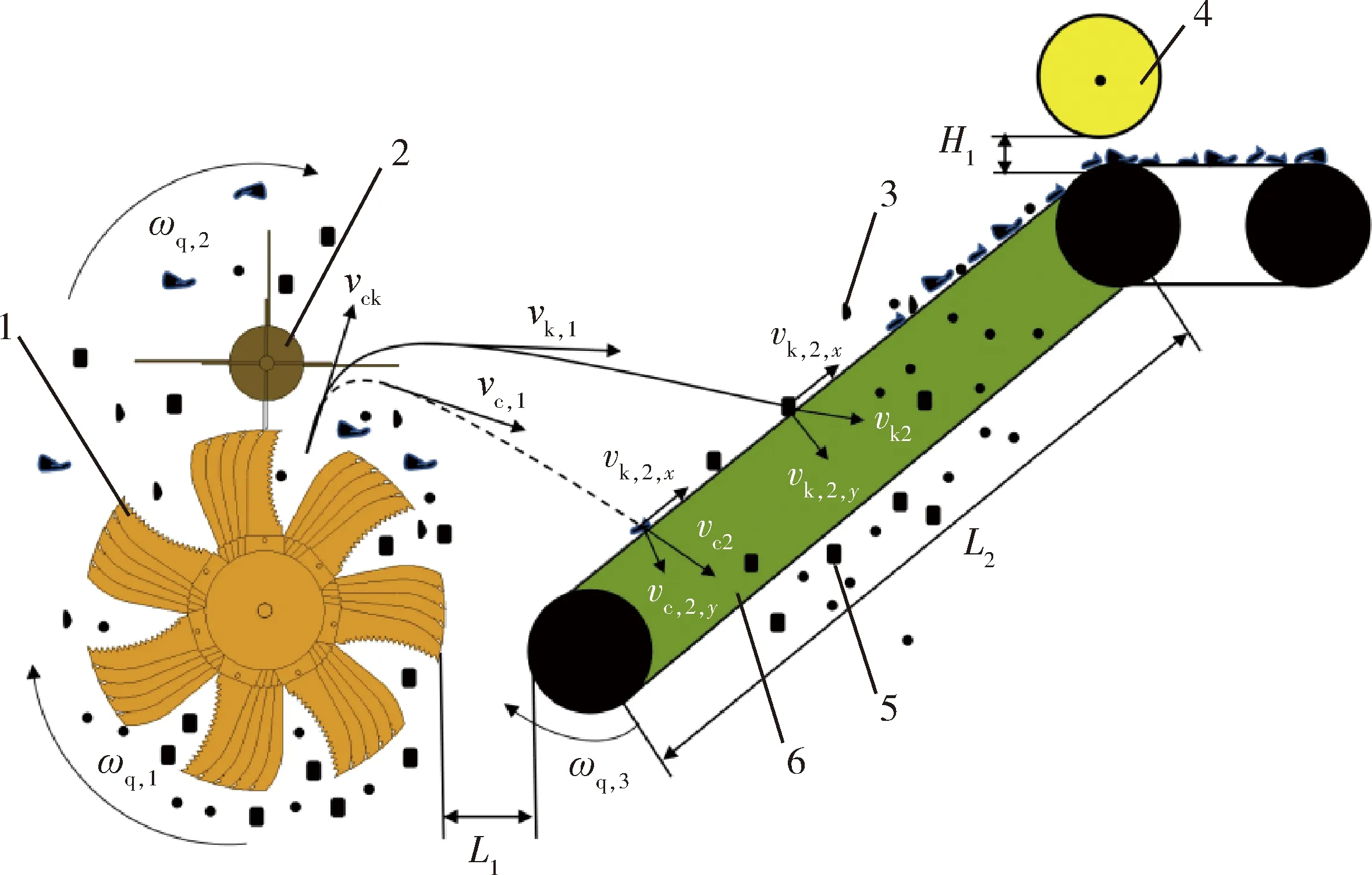
1.旋耕刀齒起膜裝置;2.柔性掃膜輥;3.殘膜;4.碎土輥;5.土塊;6.輸送篩網1.Rotary tillage knife tooth film lifting device; 2.Flexible film sweeping roller; 3.Residual film; 4.Soil breaker roll; 5.Soil block; 6.Conveying screenx為沿輸送篩網水平向上;y為垂直輸送篩網向下。ωq,1為起膜裝置角速度;ωq,2為卸膜裝置角速度;ωq,3為輸送篩分裝置角速度;L1為起膜裝置和輸送篩分裝置的距離;L2為輸送篩網長度;vck為土塊和殘膜混合物從起膜裝置拋起的初速度;vk,1為土塊從起膜裝置拋出的速度;vc,1為殘膜從起膜裝置拋出的速度;vk,2為土塊撞擊到輸送篩分裝置上的速度;vc,2為殘膜撞擊到輸送篩分裝置上的速度;vk,2,x和vk,2,y為土塊質點沿輸送篩網水平和垂直方向的分速度;vc,2,x和vc,2,y為殘膜質點沿輸送篩網水平和垂直方向的分速度。x is the horizontal upward direction along the conveying screen; y is the downward direction of the vertical conveying screen.ωq,1 is the angular velocity of the film lifting device; ωq,2 is the angular velocity of the film unloading device; ωq,3 is the angular velocity of the conveying screening device; L1 is the distance between the film lifting device and the conveying and screening device; L2 is the length of conveying screen; vck is the initial speed of the mixture of soil lump and residual film thrown from the film lifting device; vk,1 is the speed at which the soil block is thrown from the membrane lifting device; vc,1 is the speed at which the residual film is thrown from the film lifting device; vk,2 is the speed at which the soil block strikes the conveying and screening device; vc,2 is the speed at which the residual film strikes the conveying screening device; vk,2,x and vk,2,y are the particle velocity of soil lumps along the horizontal and vertical directions of the conveying screen; vc,2,x and vc,2,y are the fractional velocities of the particles of the residual film along the horizontal and vertical directions of the conveying screen.圖4 起膜回收運動示意圖Fig.4 Schematic diagram of film lifting and recovery movement
3.1 土塊拋送運動
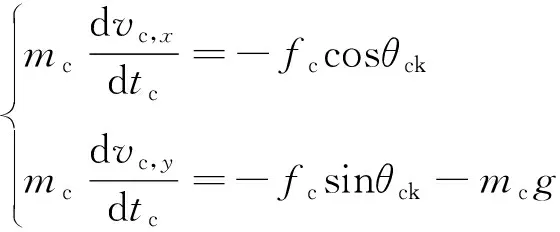
以膜土混合物拋出點為原點o,膜土混合物水平運動位移為x軸、豎直運動位移為y軸,建立直角坐標系,圖5示出膜土旋耕拋送運動過程。由于土塊質量較大,拋送過程中風阻對其影響較小,可忽略不計。根據質點運動方程,土塊的拋送過程表達[17]為:
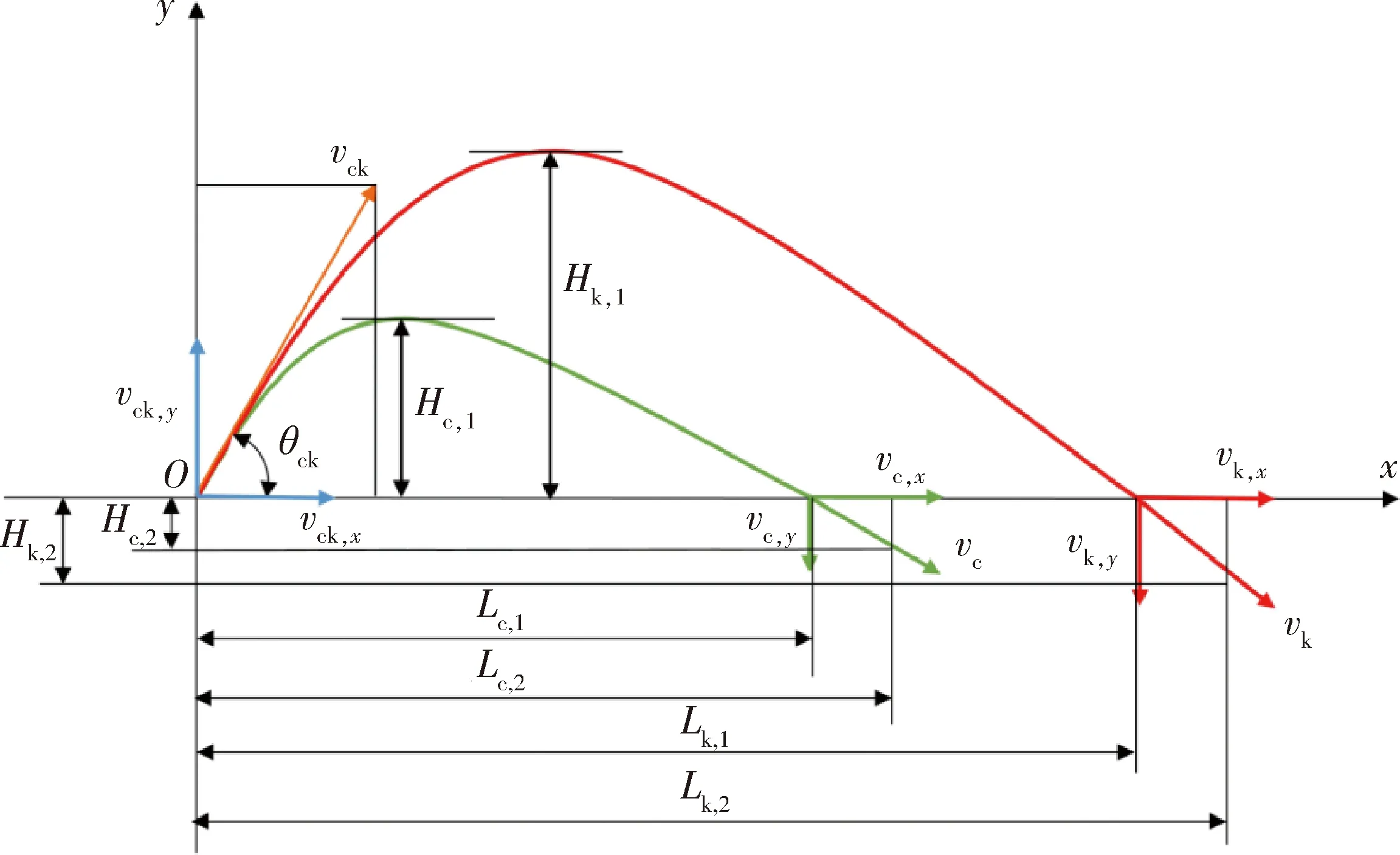
x和y分別為殘膜和土塊運動的水平和垂直位移;vck為土塊和殘膜混合物從起膜裝置拋起的初速度;vck,x和vck,y分別為vck在x和y方向的分速度;vk為土塊質點撞擊到輸送網上的速度;vk,x和vk,y分別為vk在x和y方向的分速度;vc為殘膜質點撞擊到輸送篩網上的速度;vc,x和vc,y分別為vc在x和y方向的分速度;Hk,1和Hc,1分別為土塊和殘膜拋送最大豎直高度;Hk,2和Hc,2分別為土塊和殘膜接觸輸送篩網后至碎土過濾點反向回落的垂直距離;Lk,1為土塊質點從旋耕刀齒拋出點運動至輸送篩網的水平距離;Lk,2為土塊質點從旋耕刀齒拋出點運動至碎土過濾點的水平距離;θck為土塊和殘膜混合物向輸送篩網拋送的拋送傾角。The x and y are the horizontal and vertical displacement of residual film and soil mass movement respectively; vck is the initial speed of the mixture of soil and residual film thrown from the film lifting device; vck,x and vck,y are the partial velocities of vck in x and y directions respectively; vk is the speed at which the particle of the soil block impacts the conveying screen; vk,x and vk,y are the partial velocities of vk in x and y directions respectively; vc is the speed at which the particle of the soil block impacts the conveying screen; vc,x and vc,y are the partial velocities of vc in x and y directions respectively; Hk,1 and Hc,1 are the vertical distance between the soil mass particle and the residual film particle from the throwing point of the rotary blade tooth to the highest point of the parabola; Hk,2 and Hc,2 are the vertical distance from the soil block particle and the residual film particle after contacting the conveying screen to the reverse fall of the broken soil filter point; Lk,1 is the horizontal distance from the movement of the soil particle from the throwing point of the rotary blade tooth to the conveying screen; Lk,2 is the horizontal distance from the movement of the particle of the soil block from the throwing point of the rotary blade tooth to the filtering point of the broken soil; θck is the throwing angle of the mixture of soil lump and residual film to the conveying screen.圖5 膜土旋耕拋送運動過程示意圖Fig.5 Schematic diagram of membrane soil rotary tillage throwing movement process
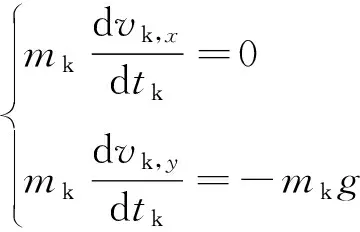
(4)
式中:mk為土塊質點質量,kg;vk為土塊質點撞擊到輸送網上的速度;vk,x和vk,y分別為vk在x和y方向的分速度,m/s;tk為土塊質點進行斜拋運動的時間,s。
為求土塊運動位移,對式(4)進行積分,可求得位移運動變化方程為:
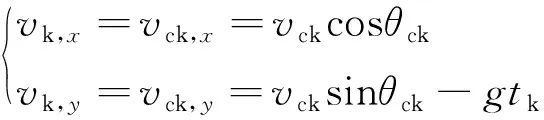
(5)
(6)
式中:θck為土塊和殘膜混合物向輸送篩網拋送的拋送傾角,(°);vck為土塊和殘膜混合物從起膜裝置拋起的初速度,m/s;vck,x和vck,y分別為vck在x和y方向的分速度,m/s。對式(5)和(6)合并變換,可求得土塊拋物線運動各階段位移:
(7)
(8)
(9)
式中:Hk,1為土塊質點拋送最大豎直高度,mm;Hk,2為土塊質點接觸輸送篩網后至碎土過濾點反向回落的垂直距離,mm;t1為土塊質點從旋耕刀齒拋出點運動至拋物線最高點所需的時間,s;t2為土塊質點從拋物線最高點運動至輸送篩網所需的時間,s;t3為土塊質點接觸輸送篩網后至碎土過濾點所需的時間,s;Lk,1為土塊質點從旋耕刀齒拋出點運動至輸送篩網的水平距離,mm;Lk,2為土塊質點從旋耕刀齒拋出點運動至碎土過濾點的水平距離,mm;L′k,2為Lk,2在輸送篩網向上提升輸送的位移,mm。
土塊被拋送到輸送篩網上時仍具有一定的運動速度,且與輸送篩網接觸后破碎,經篩網過濾后自由掉落至田間。土塊被旋轉刀齒起膜裝置拋送到輸送篩網上至其破碎的過程是質點減速運動過程,此時土塊運動受篩網過濾后重力與殘余作用力影響:
mkgsinθw-μ1mkgcosθw=mkak
(10)
vk,2,x=vk,xcosθw
(11)
(12)
式中:L″k,2為土塊回落后掉入至田間的位移,mm;ak為土塊到達拋物線最高點后的減速段加速度,m/s2;μ1為土塊與篩網接觸移動時的摩擦因數。可見,土塊減速運動過程是向篩網下部滾落移動的過程。與殘膜相比,土塊的拋物線跨度更大,滾動位移更長,可以實現膜土分離。
3.2 殘膜拋送運動
與土塊相比,殘膜密度小,密度的差異使殘膜被旋耕起膜后拋送的運動位移更小,落至輸送篩網上的距離更短。考慮殘膜密度因素,拋送時空氣阻力影響運動位移,由空氣阻力方程可得:
fc=-kvck
(13)
式中:fc為殘膜拋送過程中所受到的空氣阻力,N;k為殘膜制品的空阻系數。引入質點運動方程,得:
(14)
式中:mc為殘膜質點質量,kg;tc為殘膜質點拋送至輸送篩網所需的時間,s。對式(14)進行積分,可求得殘膜質點速度與位移運動變化方程為:
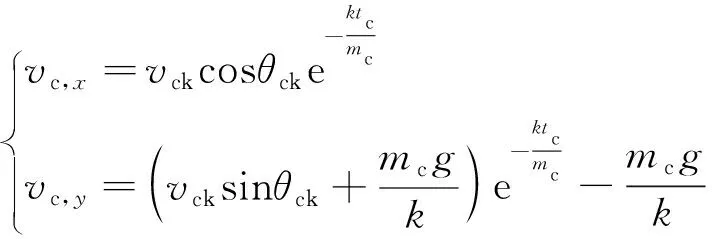
(15)
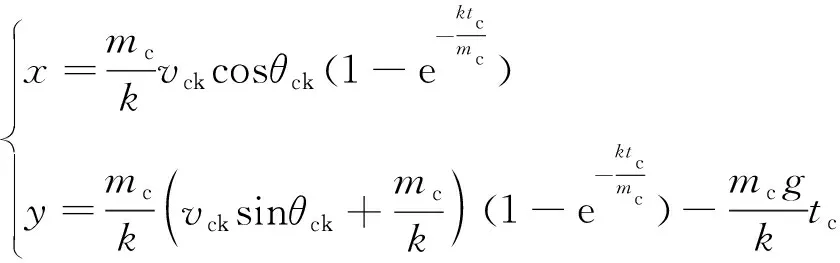
(16)
從式(15)和(16)可以看出:由于殘膜密度較小,形態為碎片狀,被旋耕刀齒起膜裝置拋送至輸送篩網上滾動的位移較小,落點位置也遠小于土塊落點位置,在輸送篩網帶動下進入集膜箱內,從而實現膜土分離與殘膜回收。
根據設計要求,殘膜回收機前進速度為4~6 km/h,旋耕刀齒起膜裝置旋轉速度區間為120~140 r/min,輸送篩網傾角范圍為25°~45°。則設殘膜回收機旋耕起膜拋送土塊質點速度初始值為2.0 m/s,輸送篩網傾角初始值為35°,代入式(7)、(8)、(9)中,可計算出土塊質點到達輸送篩網反向回落位移Hk,2=0.42 m,此時土塊在輸送篩網向上提升輸送位移L′k,2=0.62 m;通過代入初始速度、輸送篩網傾角等數據至式(10)、(11)、(12)計算可得,土塊回落后掉入至田間的位移L″k,2=1.24 m,即表明土塊通過旋耕刀齒起膜裝置拋送至輸送篩網后,反向回落至輸送帶下端,碎土塊經篩網過濾掉落至田間,其運動方向與輸送篩網運動方向相反;而殘膜拋送距離更短且密度較小,輸送篩網可直接將殘膜傳送至回收箱內,從而完成了大部分膜土分離。實測時僅有小部分因涌土引起的土塊被傳輸至輸送帶上端,而輸送帶上端安裝有碎土輥,可將土塊再次碎化分離。從運動分析也可以看出,旋耕刀齒起膜裝置可以通過殘膜和土塊被拋送力度的不同,實現膜土分離。
4 田間試驗與分析
4.1 測試地點及土壤條件
田間測試地點為新疆生產建設兵團第一師阿拉爾市10團8連推廣中心棉田(40°33′ N,81°10′ E,海拔1 031 m),農田土壤為沙壤土,覆膜年限為14年,面積26.67 hm2,為多年連作覆膜種植棉田。測試時間為2022-03-26,此時農田為春耕犁地后待播種地塊。
4.2 田間試驗方法
1)田間測試。采用約翰迪爾6J-2104拖拉機(約翰迪爾(天津)有限公司生產)為作業動力,旋耕刀齒式棉田耕層殘膜回收機采用牽引式懸掛,旋耕刀齒起膜裝置由拖拉機旋轉輸出軸提供動力,提供75~450 r/min分段式有級變速調節;卸膜箱、行走輪和限深輪等均通過拖拉機自帶液壓系統提供動力。試驗前,按照新疆農田耕地要求進行犁地作業,耕地后采用土壤溫濕度檢測儀(WKT-M1型,江蘇維科特儀器儀表有限公司生產)測量土壤含水率為22.43%~23.18%,滿足殘膜回收作業條件。田間測試采用分區測試法,將農田分成長度80 m,寬度2 m的矩形區域20個,依次編號,按序號進行作業測試。根據設計的作業區間,以及參考殘膜回收機作業方法,設置旋耕刀齒式棉田殘膜回收機作業速度為4、5、6 km/h 3個水平,旋耕刀齒起膜裝置旋轉速度水平值為140 r/min,入土深度160 mm。為提高試驗準確性,在每項因素試驗時設計重復組,統計2組試驗的平均值,即為試驗結果。
2)殘膜量測量方法。試驗前,根據GB/T 25413—2010《農田殘膜殘留量限值及測定》[18],在試驗農田隨機選取5個殘膜取樣點,取樣點面積1 m2,收取取樣點0~300 mm以內的殘膜,進行人工分選,去除田間雜物,再用超聲波清洗機(FRQ-1002 T,浙江法蘭特公司生產)清洗,自然干燥后,采用電子天平(M1002E-02型,美國METTLER TOLEDO公司生產)稱重,獲取試驗前、后農田殘膜質量。試驗后,再以此方法取樣,校核殘膜回收機作業后農田殘膜殘留量。作業前,采用五點取樣方法測得試驗田0~300 mm全耕層殘膜殘留密度均值為268.29 kg/hm2。
4.3 試驗評價指標
依據GB/T 25412—2010《殘地膜回收機》[19],結合旋耕刀齒式棉田耕層殘膜回收機設計要求,選取殘膜回收率、作業效率和含雜率作為試驗評價指標。
1)殘膜回收率。殘膜回收率的標定方法為五點采樣法,殘膜回收機作業前后各進行1次采樣。采樣面積為100 cm×100 cm,采樣深度30 cm,計算平均值。計算公式[20-21]為:
(17)
式中:δ0為殘膜回收率,%;M0為土壤中總的殘膜殘留量,g;M1為作業后土壤中剩余殘膜殘留量,g。
2)作業效率。試驗時,根據殘膜回收機的作業速度設置作業幅寬,測試殘膜回收機完成每個160 m2作業面積所需的時間,時間越短,則作業效率越高。殘膜回收機故障時間計入作業面積所花費的時間。具體的計算方法為:
(18)
式中:η為作業效率,hm2/h;Sz為殘膜回收機作業面積,hm2;tz為殘膜回收機作業時間,h。
3)含雜率。含雜率是指殘膜回收機回收的殘膜中含有棉桿、雜根等田間雜物的質量與殘膜、田間雜物質量之間的比值[22]。由于殘膜中碎土較容易去除,在試驗時不計入田間雜物范圍。含雜率主要判別回收后殘膜的干凈程度,計算公式[23]為:
(19)
式中:δ為含雜率,%;g1為殘膜回收機回收的殘膜總質量,kg;g2為殘膜回收機回收的殘膜、棉桿、雜根等田間雜物去除田間碎土后的總質量,kg。
5 結果與分析
田間試驗過程中,旋耕刀齒式棉田耕層殘膜回收機運行穩定,無作業故障,滿足回收要求。田間試驗結果見表2。當旋耕刀齒起膜裝置旋轉速度水平值為140 r/min,入土深度為160 mm,機具作業速度為5 km/h時,回收率為80.06%,作業效率0.725 hm2/h,含雜率25.4%,此時為較適宜的作業速度。從試驗結果可以看出,隨著機具作業速度增大,作業效率增高,殘膜回收率降低,含雜率升高。
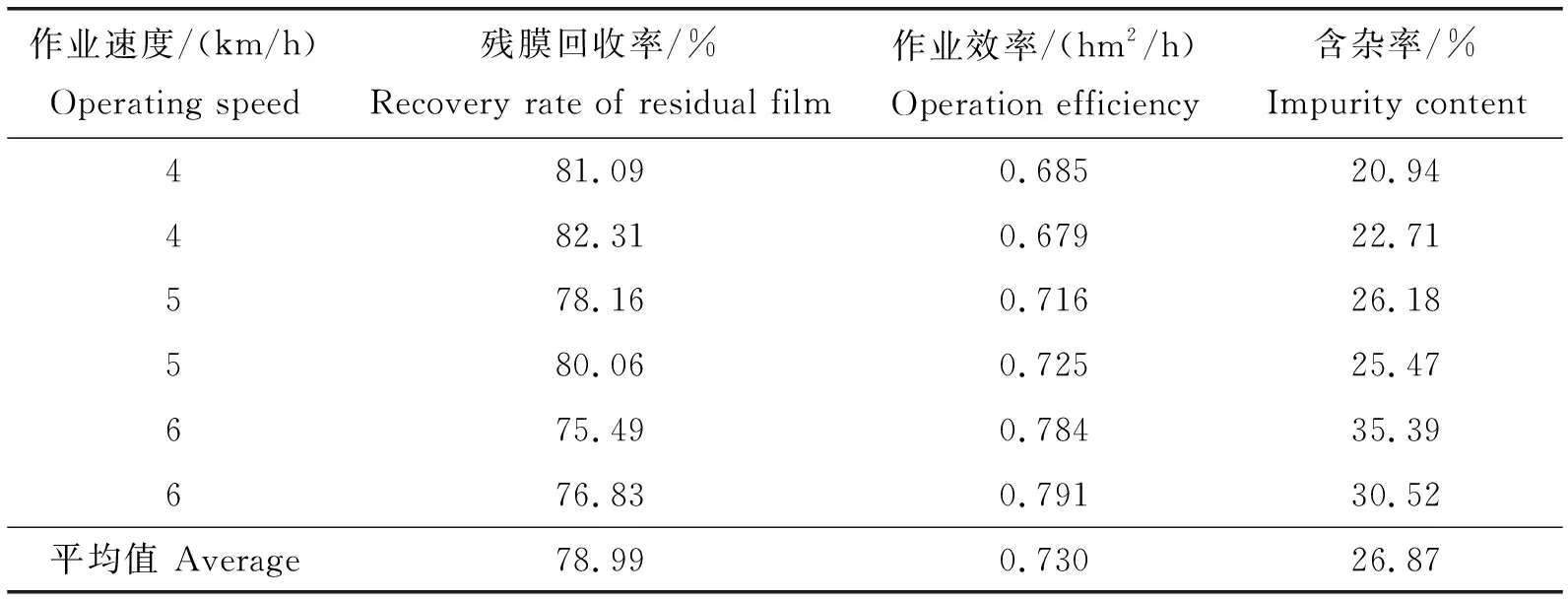
表2 旋耕刀齒式棉田耕層殘膜回收機作業田間試驗結果Table 2 Field test results of rotary tillage knife tooth type cotton field plough layer residual film recovery machine
圖6示出旋耕刀齒式棉田耕層殘膜回收機作業后的農田地面效果和回收后的耕層殘膜。可見,旋耕刀齒式棉田耕層殘膜回收機作業后的地面平整,耕作層中的大片殘膜均已完成回收。
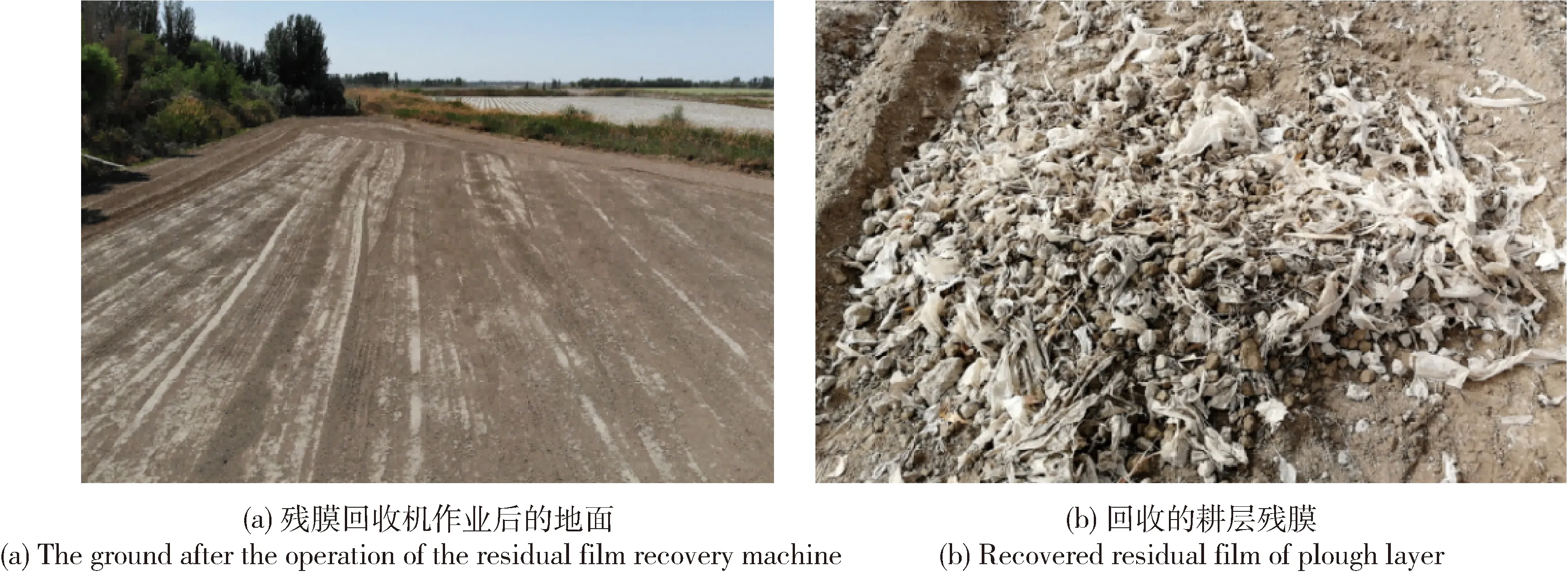
圖6 旋耕刀齒式棉田耕層殘膜回收機作業效果Fig.6 Operation effect of rotary tillage knife tooth type cotton field plough layer residual film recovery machine
對旋耕刀齒式棉田耕層殘膜回收機作業后的農田進行取樣,采集1 000 mm×1 000 mm×300 mm土壤層中的殘膜樣品,其大小、密度分布見圖7。
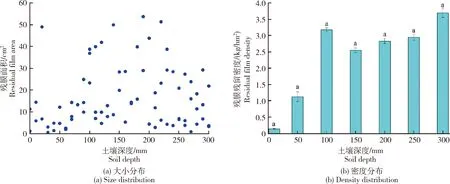
柱上字母a表示不同土壤深度下殘膜殘留密度差異顯著(P<0.05),豎線表示標準差。The letter a above the column indicates a significant difference in residual density of residual membrane at different soil depths (P<0.05), and the vertical line indicates the standard deviation.圖7 回收作業后土壤殘膜大小及密度分布Fig.7 Size and density distribution of soil residual film after recycling operation
殘膜回收機作業后,耕層殘膜量已明顯降低,0~300 mm土壤層中殘膜面積均值<25.38 cm2,殘留片數<90片,表層殘膜殘留密度降低至0.124 kg/hm2,各耕層殘膜殘留密度均已明顯降低,最高殘留密度為250~300 mm土壤層,密度為3.796 kg/hm2;全耕層殘膜量由作業前的268.29 kg/hm2降低至作業后的16.49 kg/hm2,每個樣點的平均殘膜片數由作業前的370片減少至作業后的90片,表明旋耕刀齒式棉田耕層殘膜回收機對農田土壤殘膜污染治理效果明顯。
6 結 論
本研究針對耕層殘膜回收機傳統篩分式起膜作業方式效率低、回收效果差等問題,設計了一種基于膜土拋送分離輸送的旋耕刀齒式起膜方法,研制出了起膜回收整機系統,并對機具關鍵部件進行了結構和參數設計。
1)對樣機進行田間試驗驗證,結果表明,樣機作業速度增大,殘膜回收率降低,含雜率升高。當作業速度為5 km/h時,回收率為80.06%,作業效率為0.725 hm2/h,含雜率為25.47%,此時樣機具有較好的殘膜回收效果。
2)田間試驗表明,旋耕刀齒式棉田耕層殘膜回收機能夠有效回收耕層中面積較大的地膜碎片。持續性的機械化回收不僅能降低土壤中殘膜存量,從源頭上減小地膜碎片給作物生長、土壤環境帶來的污染影響,也有利于抑制面積較大的殘膜向微塑料碎片轉化。
3)旋耕刀齒式棉田耕層殘膜回收機適用于多年持續覆蓋地膜的典型區域土壤;地膜逐年分解,殘存在耕層土壤中的地膜碎片越來越小,隨著水肥向更深處遷移、積累,未來耕層殘膜治理應更注重于微小地膜碎片的處理。
猜你喜歡
小主人報(2022年1期)2022-08-10 08:28:44
新作文·小學低年級版(2021年9期)2021-11-27 07:57:46
學生天地(2020年17期)2020-08-25 09:28:54
作文成功之路·小學版(2020年7期)2020-08-24 08:19:30
少年博覽·初中版(2020年6期)2020-06-12 11:42:23
作文成功之路·小學版(2020年7期)2020-01-02 10:10:44
趣味(數學)(2018年12期)2018-12-29 11:24:10
小學生作文(中高年級適用)(2017年10期)2017-11-13 06:01:00
能源(2016年2期)2016-12-01 05:10:46
故事大王(2016年7期)2016-09-22 17:30:08