株距可調式葡萄苗木栽植機設計與試驗
2023-09-07 13:02:10徐麗明閆成功譚好超沈聰聰
中國農業大學學報 2023年10期
關鍵詞:作業
劉 飛 徐麗明 牛 叢 閆成功 譚好超 沈聰聰
(中國農業大學 工學院,北京 100083)
目前,國內葡萄苗木的栽植主要依靠人工完成,勞動力密集產業特征突出,生產機械化應用程度較低[1-3],葡萄生產過程中,栽植技術在提高作物生長的抗災抗逆能力、保證作物穩增產和提高產品品質等方面起到至關重要的作用[4],研究葡萄苗木栽植機對提高葡萄苗木栽植環節的機械化水平具有重要意義。
栽植機在葡萄種植領域的應用較少,但在其他苗木的栽植作業中應用較為廣泛,按照栽植器的機構類型,可分為鉗夾式、撓性圓盤式、吊籃式、導苗管式、鴨嘴式和鏈夾式栽植機[4]。各類栽植機都有各自的特點,鉗夾式栽植機結構簡單、栽植株距較穩定,栽植深度可靠,但是存在栽植頻率低、株距調整困難和易傷苗等問題[5-6];撓性圓盤式大蔥栽植機在小株距栽植方面應用前景廣泛,結構簡單,成本低,栽植頻率高,但栽植深度不穩定和圓盤耐久性較差[7-8];吊籃式栽植機傷苗率低,但只適用于栽植穴盤苗,結構復雜,栽植頻率低[9];導苗管式栽植機傷苗率和倒伏率低,栽植深度穩定,但存在漏栽和重栽問題,并只適用于栽植穴盤苗[10-13];鴨嘴式栽植機傷苗率和倒伏率低,株距穩定性和耕深穩定性好,工作時能變換不同的株距,無重栽、漏栽現象,但只適用于栽植穴盤苗,并且結構復雜,制造成本高和適用性較窄[4,6,14-16];鏈夾式作物栽植機與嘴式栽植機效果相同,但株距較難調節[17]。綜上所述,鴨嘴式、吊籃式和導苗管式栽植機只適用于穴盤苗的栽植;撓性圓盤式栽植機栽植深度不穩定,且無法保證秧苗的直立性;鉗夾式栽植機的栽苗直立度難以保證,株距調節困難且易傷苗,而鏈夾式栽植機能較好的保證栽苗直立度和耕深穩定性,株距穩定等優點,基本符合葡萄苗木栽植的農藝要求,因此本研究將葡萄苗木栽植機設計為鏈夾式[18]。
針對當前葡萄苗木栽植作業過程中存在的勞動強度大、作業效率低和栽植質量難以保證,以及鏈夾式栽植機株距調節困難等問題,本研究擬設計一種株距可調式葡萄苗木栽植機,能夠根據作業株距、栽植深度和栽植頻率等農藝要求,一次性完成開溝、投苗、鎮壓和覆土等操作,保證栽植質量的同時,實現株距調節。通過實地調研與理論分析,確定主要作業參數及株距調控原理,并結合田間試驗進行作業效果驗證,以期為葡萄苗木機械化作業提供技術支持。
1 整機結構與工作原理
本研究設計的葡萄苗木栽植機適用于露天葡萄園內先栽苗后立石柱的生產模式。根據栽植農藝要求對葡萄苗木進行修剪后,隨機選取30根生長狀況良好的葡萄苗木。外形尺寸包括:苗高h1=27 cm、根長h2=11 cm、主莖莖粗d=1.2 cm、莖部最大寬度b=5.8 cm、根部最大寬度B=6 cm。葡萄苗木實物及外形尺寸見圖1。
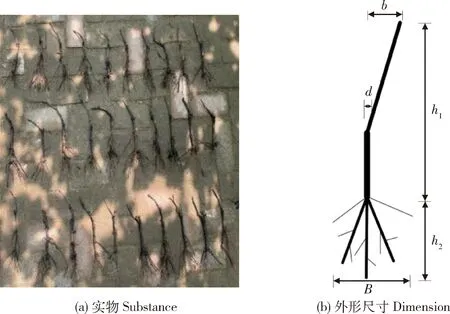
d為主莖莖粗;b為莖部的最大寬度;B為根部的最大寬度;h1為苗高;h2為根長。d is the main stem stem thickness; b is the maximum width of the stem; B is the maximum width of the root; h1 is the seedling height; h2 is the root length.圖1 葡萄苗木實物和外形尺寸示意圖Fig.1 Schematic diagram of the physical and external dimensions of the grape seedlings
葡萄苗木栽植農藝要求:栽植株距為100~200 cm,栽植的直立度要求主莖垂直于地面,主莖與地面夾角<30°時,視為倒伏苗,埋土深度為15 cm,栽植頻率≥30株/min。
1.1 整機結構
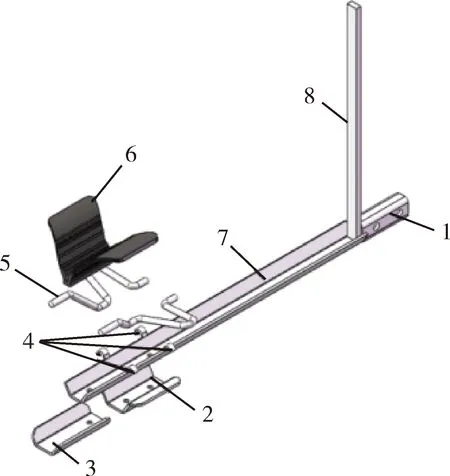
本研究所設計的株距可調式葡萄苗木栽植機的整機結構由栽植機構、放苗箱、座椅、控制柜、組滑板、開溝器、鎮壓輪、覆土輪、測速輪、機架、地輪等部分組成(圖2)。機架前端為三點懸掛裝置,與拖拉機掛接;為保證栽植直立度,設計鎮壓輪著地點與栽植機構中心線重合;開溝器側表面設置有調節孔,可根據株距要求進行上下前后調節。工作參數見表1。
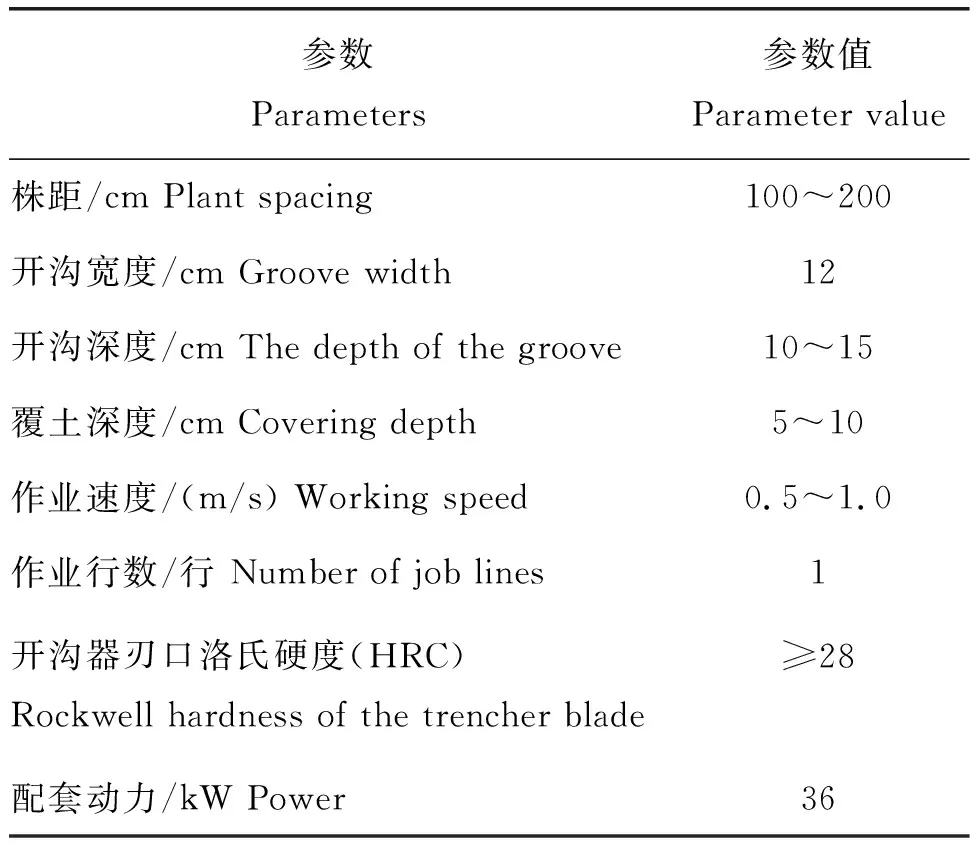
表1 葡萄苗木栽植機主要技術參數Table 1 Main technical parameters of grape seedling planting machine
1.2 工作原理
作業前,作業人員將適量葡萄苗木放入苗箱,依據作業要求,在控制柜的觸摸屏上輸入目標株距值。工作時,由開溝器開出一條寬12 cm、深10~15 cm的栽植溝;同時,投苗人員將葡萄苗木放置在苗夾上,苗夾隨主動鏈輪轉動;當苗夾進入組滑板時,組滑板內逐漸變小的寬度使苗夾夾緊,實現送苗過程。當苗夾轉動至垂直狀態時,恰好脫離組滑板;此時,苗夾張開,完成投苗作業。控制系統根據測速編碼器的電信號和輸入的目標株距值,實時調節電機轉速,以保證投苗間距的一致性。投苗結束后,由鎮壓輪和覆土輪分別完成鎮壓和覆土工作,由此完成單株苗木的栽植過程。依此循環,直至栽植工作全部完成。
2 關鍵部件設計
2.1 栽植機構
栽植機構主要由苗夾、下傳動軸、擋板、鏈傳動、上傳動軸等組成(圖3),上傳動軸為主動軸,依據生產經驗,在鏈條上均布6根苗夾。
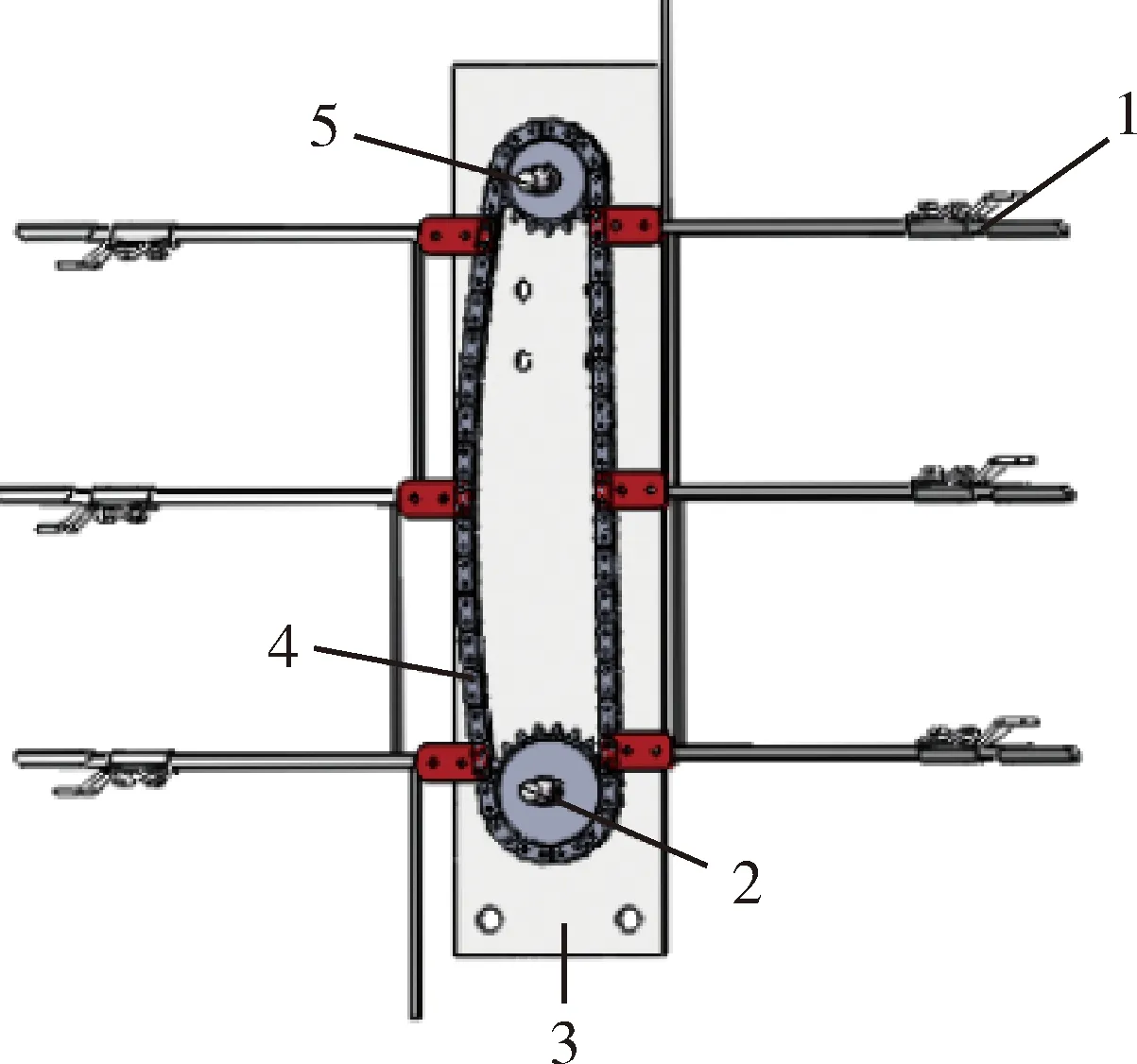
1.苗夾;2.下傳動軸;3.擋板;4.鏈傳動;5.上傳動軸1.Seedling clip; 2.Lower drive shaft; 3.Baffle; 4.Chain drive; 5.Upper drive shaft圖3 栽植機構三維示意圖Fig.3 3D schematic diagram of the planting mechanism
本研究設計的栽植機構中,由鏈輪中心距及苗夾位置可知,每個苗夾之間有13個鏈節,結合苗夾間距及鏈輪分度圓直徑可推算出,當主動鏈輪轉過當主動鏈輪轉過2/3圈,正好完成1次投苗作業,此時拖拉機前進距離恰好為1倍株距值。
苗夾是本機構主要作業部件,設計不合理會直接影響栽植機的栽植效果、傷苗率及投苗人員的舒適性。苗夾主要由底殼、固絲鐵片、護膠鐵片、夾爪和夾持橡膠構成(圖4);其中,底殼由固絲耳朵、托苗槽和豎板等組成。固絲鐵片、護膠鐵片和夾爪依次通過螺栓固定在底殼上,通過夾持橡膠的張開和閉合實現苗木夾持過程。通過測量苗木參數,設置的最優夾持橡膠尺寸為,長30 cm、寬5 cm。
1.底殼;2.固絲鐵片;3.護膠鐵片;4.固絲耳朵;5.夾爪;6.夾持橡膠7.托苗槽;8.豎板1.Bottom shell; 2.Wire fixing iron piece; 3.Rubber protection iron piece; 4.Wire fixing ears; 5.Clamping jaws; 6.Clamping rubber; 7.Nursery groove; 8.Vertical plate圖4 苗夾三維示意圖Fig.4 3D schematic diagram of the seedling clip
底殼是撐托苗木的主要部件,其通過螺栓與外鏈節固定連接。本研究依據葡萄苗木最大苗高h1和最大莖粗d,設計底殼有效工作長度為34 cm,托苗槽最小寬度為1 cm,以穩定支撐苗木。依據莖部底端直線長度10 cm,確定底殼上方4個固絲耳朵分布位置。根據相鄰苗夾間的直線距離,設計豎板高度為22 cm,以防止底殼受苗木自重影響而發生末端傾斜。
夾爪分為夾持部分和滑動部分(圖5),為保證投苗的可靠性,同時結合2塊夾持滑板之間的距離及夾緊程度,設計夾持部分和滑動部分所在平面之間的夾角為45°;根據夾持橡膠的寬度、耳朵的安裝位置及夾持組滑板的安裝位置,確定夾爪的總長度為10 cm。
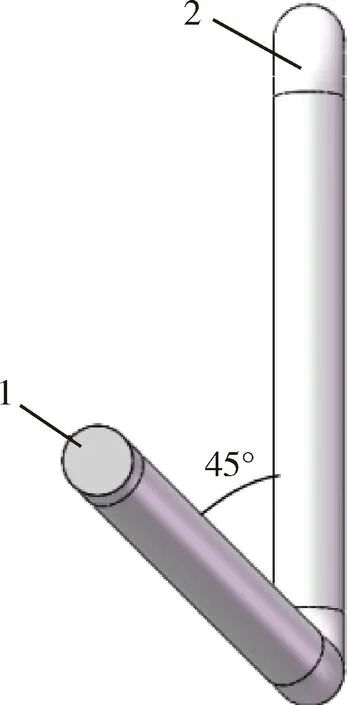
1.夾持部分;2.滑動部分1.Clamping part; 2.Sliding part圖5 夾爪三維示意圖Fig.5 3D diagram of clamping jaws
2.2 護根式開溝器
開溝的質量直接決定葡萄苗木的栽植情況和長勢,目前開溝裝置分為滾動式開溝裝置和滑動式開溝裝置。滾動式開溝裝置結構比較復雜、質量大、成本高,不適合葡萄苗木栽植機的作業要求;滑動式開溝裝置可分為鋤鏟式、船型鏟式、滑刀式、芯鏵式等多種形式。鋤鏟式開溝裝置對栽植前整地的要求較高,且沒有開溝的側板;船型鏟式開溝裝置結構較為復雜,溝底為V型,此溝型與葡萄苗木的根部長勢相反,不利于葡萄苗木的生長;滑刀式開溝裝置結構復雜,滑刀刀片成本高且易磨損;芯鏵式開溝器結構比較簡單、有良好的入土性能,溝底呈矩形,利于葡萄苗木的生長[19-25]。為保證苗木由底部鏈輪的旋轉方向向水平方向穩定過渡,選擇有側板的芯鏵式開溝裝置,其結構見圖6。
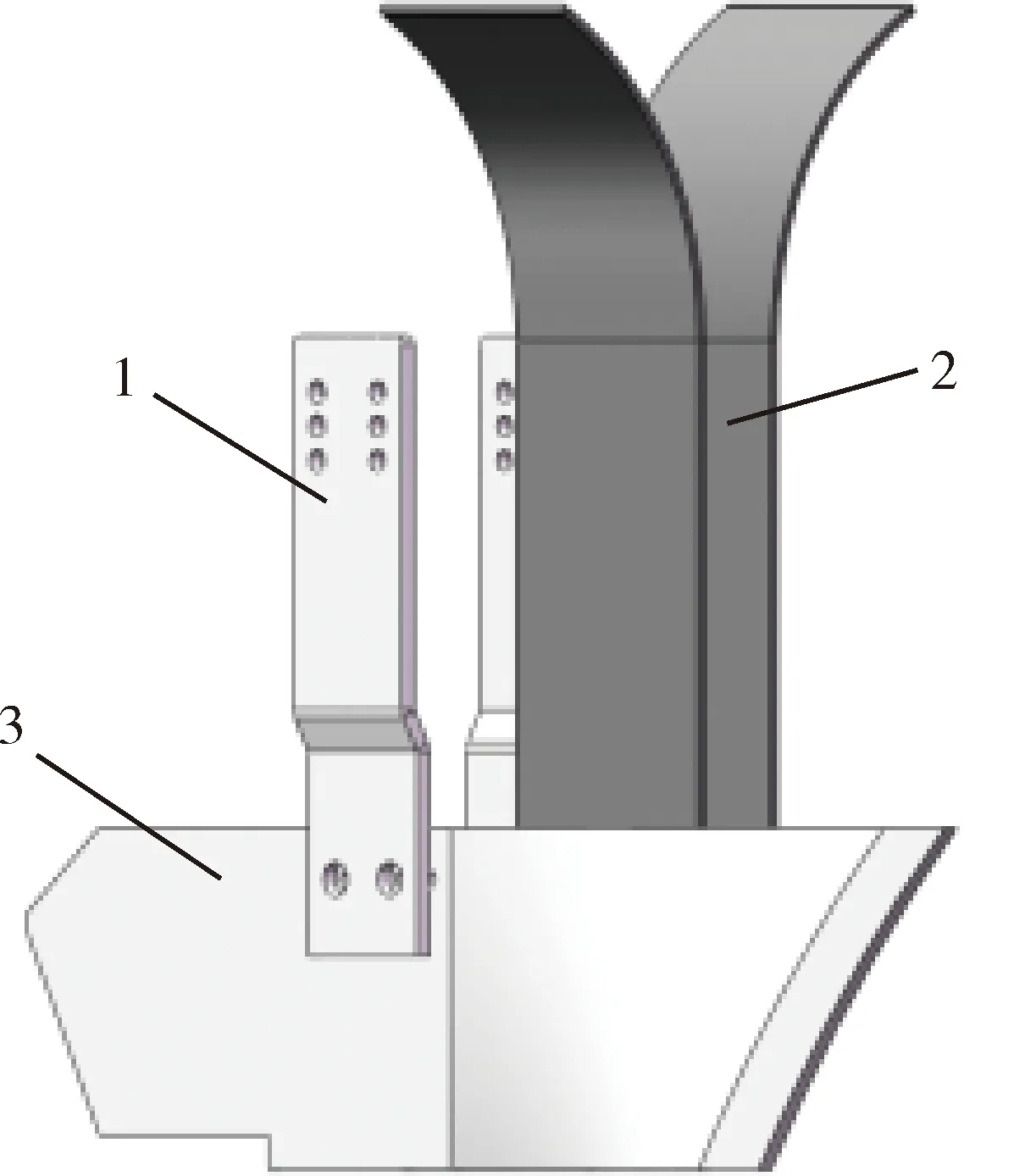
1.支架;2.護根滑板;3.芯鏵式開溝裝置1.Bracket; 2.Root guard skids; 3.Core share trenching device圖6 開溝器三維示意圖Fig.6 Trencher 3D schematic
結合栽植深度要求,同時考慮開溝器的開溝阻力及加工可行性,設計開溝器寬度為12 cm,高度20 cm;根據葡萄苗木的運動軌跡,設計芯鏵式開溝器的長度為60 cm,加工時要求開溝器刃口的HRC≥28。
2.3 開溝器及栽植機構的相對位置
開溝器與栽植機構之間的相對位置關系影響葡萄苗木的栽植效果。葡萄苗木的虛根非常柔軟,為了使其更自然、更舒展的埋在土壤里,需要結合葡萄苗木運動過程,根據不同的株距值,對開溝器和栽植機構的相對安裝位置進行合理設計。
2.3.1葡萄苗木栽植過程運動分析
苗夾在繞下方鏈輪旋轉至完成投苗的階段,葡萄苗木經歷了從開始埋土到完成埋土的過程,運動過程見圖7。
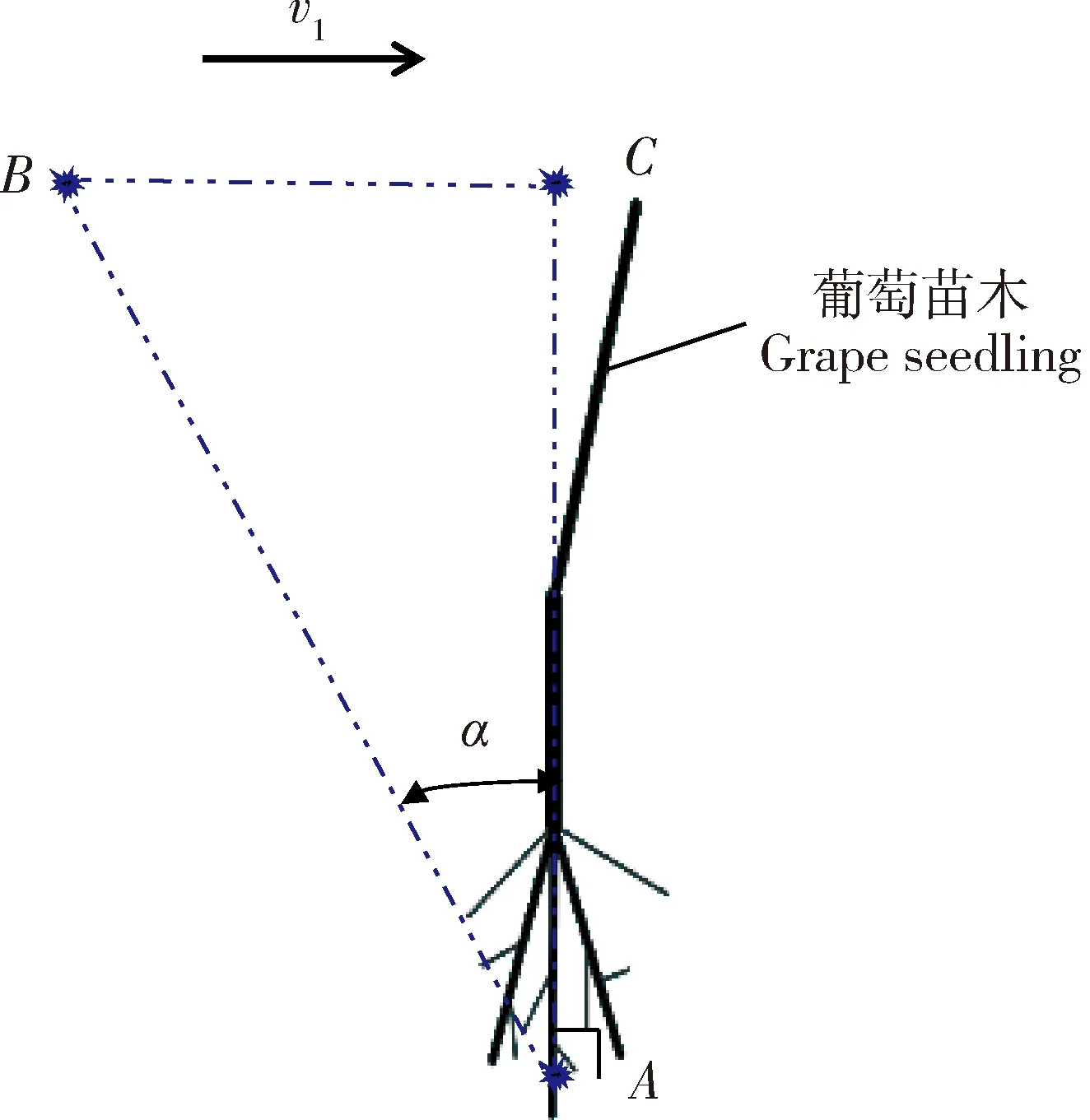
A為埋土點;AB與開始投苗時的苗木重合;AC與完成投苗時的苗木重合;BC為投苗期間拖拉機的前進距離;α為葡萄苗木繞下鏈輪轉過的角度;v1為拖拉機的前進速度。A is the burial point; AB coincides with the seedlings at the beginning of the seedling drop; AC coincides with the seedlings at the completion of the seedling drop; BC is the forward distance of the tractor during the seedling drop; α is the angle of the grape seedlings turning around the lower sprocket; v1 is the forward speed of the tractor.圖7 葡萄苗木運動過程示意圖Fig.7 Diagram of the movement process of grape seedling
為使葡萄苗木根部在溝內更加自然舒展,需要計算開溝器的安裝位置。假設拖拉機以0.5 m/s的速度直線行駛,苗夾轉速為0.33 r/s,當設定株距值為100 cm時,則投苗期間拖拉機理論前進距離與苗木繞下方鏈輪的旋轉角度之間的關系滿足:
(1)
式中:α為葡萄苗木繞下鏈輪轉過的角度,(°);L1為投苗期間拖拉機理論前進距離,m。整理式(1)可得α=240L1;同理,當設定的株距值為150和200 cm時,有α=160L1和α=120L1。
2.3.2開溝器及栽植機構相對位置確定
由式(1)計算可得,葡萄苗木繞下方鏈輪轉過不同角度α時,對應的投苗期間(從開始投苗到完成投苗的階段)內拖拉機理論前進距離L1。同時,通過實地試驗測量相同條件下,拖拉機實際前進距離L2。以株距為100 cm為例,當角度α=8°時,拖拉機理論前進距離L1與拖拉機實際前進距離L2的相對誤差δ最小,為1.2 cm;此時,開溝器支架中心線與栽植機構中心線的距離為245 cm。同理,株距為150 和200 cm且拖拉機理論前進距離L1與拖拉機實際前進距離L2的相對誤差δ最小時,對應的α值分別為10°和12°,此時,開溝器支架中心線與栽植機構中心線的距離分別為267.5和290 cm。由此,確定了株距為100、150和200 cm時開溝器與栽植機構的相對安裝位置。
3 株距調節控制系統設計
結合葡萄苗木栽植機的實際情況,設計了包含人機交互功能、信號采集功能、信號處理功能、動作執行功能和串口輸出功能的控制系統[26-29]。
由經驗知,栽植機栽植頻率為30株/min是操作熟練的投苗人員最舒適的投苗頻率。主動鏈輪的最高轉速n2=20 r/min,當栽植株距為100~200 cm時,拖拉機的最大前進速度為0.5~1.0 m/s,測速輪的最高轉速滿足:
(2)
式中:n1為測速輪轉速,r/min;v為拖拉機的最大前進速度,m/s;D為測速輪的外徑,m。由式(2)計算得到測速輪的最高轉速為29.84~59.68 r/min。
測速輪與主動輪的理論傳動比滿足:
(3)
式中:i為傳動比;n2為主動鏈輪轉速,r/min。
計算得到不同株距對應的理論傳動比(圖8),該數據可為控制系統軟件功能實現提供理論支持。
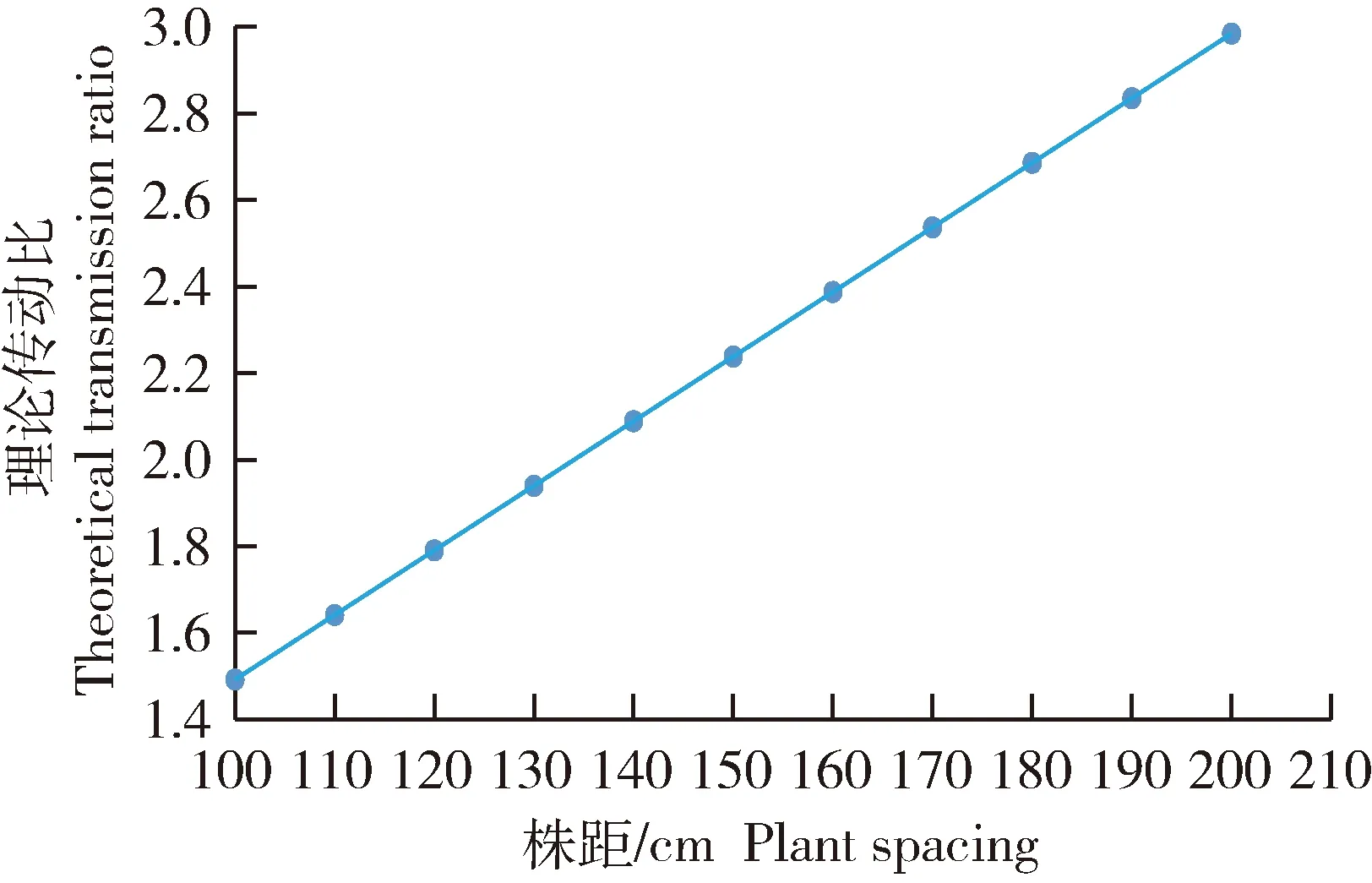
圖8 栽植株距與理論傳動比的擬合關系Fig.8 Fitting relationship between planting spacing and theoretical transmission ratio
3.1 控制系統硬件設計
基于人機交互的株距可調式控制系統主要由觸摸屏、編碼器、控制器、電源模塊、電機驅動器和直流無刷減速電機等部分組成。控制器選用STM32 F103ZET6單片機(72 M主頻,144引腳,供電電源DC12 V),能實現定時、計數脈沖和輸出PWM信號的功能要求;觸摸屏選用大彩M系列串口屏DC80480M070_2111_0C,采用400 M SOC處理器,運行速度較快,支持按鈕控件和文本控件等多種組態控件;編碼器選用E6B2-CWZ3E增量式光電旋轉編碼器,每轉輸出1 000個脈沖,通過記錄設定一定時間內編碼器脈沖數計算轉速;直流無刷減速電機,選用XCDQ型直流無刷電機(電壓DC24 V,額定轉矩為0.28 N·m,額定轉速為2 000 r/min),減速器減速比為1∶100;選用DBL-30驅動器,可外接PWM信號驅動直流無刷電機調速;電源模塊包括12 V直流電源和12 V轉24 V升壓模塊,拖拉機自帶蓄電池為12 V直流電源[27,30]。
3.2 控制系統軟件設計
本控制系統設計的控制程序流程見圖9。程序開始運行,首先進行系統初始化,然后進入定時中斷,判斷是否通過觸摸屏輸入株距值:若否,則進入下次中斷,持續進行判斷,直到獲得作業的株距值;若是,開始調速工作,驅動栽植機構投苗。測定測速輪的轉速,根據設置的株距值和測定的作業速度,實時調節直流無刷減速電機的轉速,直至作業結束。
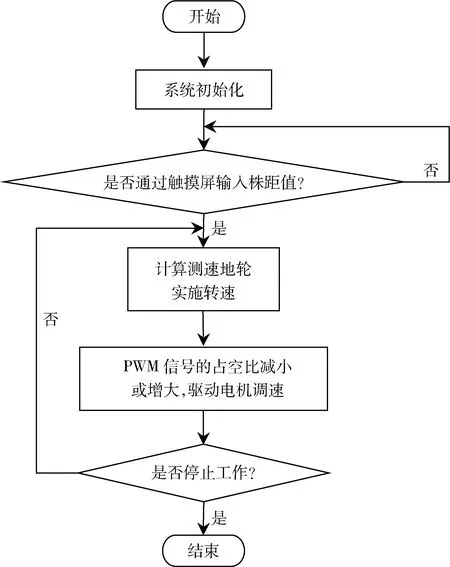
圖9 控制程序流程Fig.9 Control program flow chart
4 田間試驗
為評定葡萄苗木栽植機的作業性能,驗證栽植精度、栽植頻率和栽植質量是否符合整機性能要求,于2021年7月在山東省日照市莒縣志昌農業科技發展股份有限公司葡萄科技館進行田間試驗。試驗設備包括TDR150土壤水分速測儀(量程0~50%,精度±2%,分辨率0.1%)、卷尺、秒表、500 mm直尺、鐵鍬、量角器等。試驗區地塊長度為60 m,土壤質地類型為輕壤土,測定土壤含水率為15%~20%。
以株距值為100、150和200 cm進行田間試驗,配套動力為山拖泰山TS404拖拉機,作業速度根據株距值依次設置為1、0.75和0.5 m/s。試驗結束后,根據相關的文獻資料,并結合現行的設計標準LY/T 1933—2019《林業機械 自行式苗木移栽機》[18]和JB/T 10291—2013《機械行業 旱地栽植機械》[30],測量相關數據,并對栽植機的栽植精度、栽植頻率和栽植質量進行計算和分析。
4.1 電機轉速靜態標定試驗
葡萄苗木栽植機控制系統需要根據直流無刷電機的目標轉速實時改變PWM信號的占空比,因此需要標定不同占空比對應的轉速[27,30]。標定方法為:依次修改PWM信號占空比,從0~100%的占空比中每間隔5%,測定1次電機轉速n2,然后對所有數據點進行線性擬合,得到電機轉速靜態標定結果(圖10)。可知,占空比和轉速之間的擬合決定系數R2=0.999 9,擬合程度高。將每次計算的電機轉速n2代入電機轉速靜態標定曲線,即可計算當前位置的占空比,以此來實時驅動電機調速。
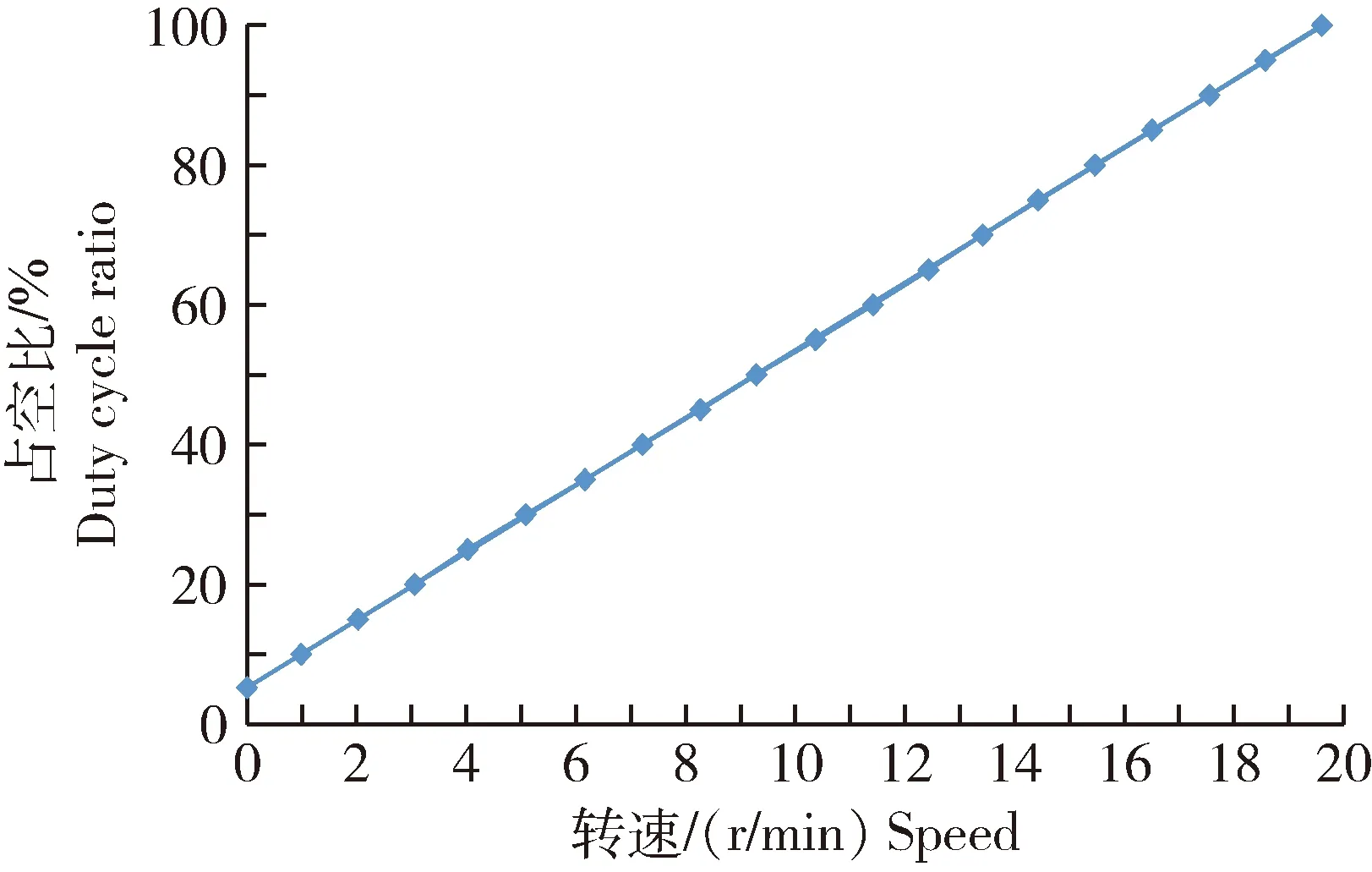
圖10 電機轉速靜態標定的試驗結果Fig.10 Test results of static calibration of motor speed
4.2 傳動比校正試驗
滑移率在栽植過程中始終存在,對栽植株距具有較大影響,需要通過實際的株距值對傳動比進行校正,提高栽植株距的準確度。
在葡萄園大田內,以11個株距值(100、110、…、200 cm)分別進行3次重復試驗,每次隨機選取連續的11棵葡萄苗木,測量其栽植株距,并計算平均值。
當株距值為100 cm,理論傳動比為1.492,通過田間試驗測得的實際株距的平均值為130 cm。
測速輪的周長S滿足:
S=πD
(4)
當拖拉機前進距離為1倍的實際株距值(1.3 m)時,時間t滿足:
(5)
由2.1節分析可知,栽植機構主動鏈輪轉過2/3圈,此時轉速n2滿足:
(6)
測速輪轉速n1滿足:
(7)
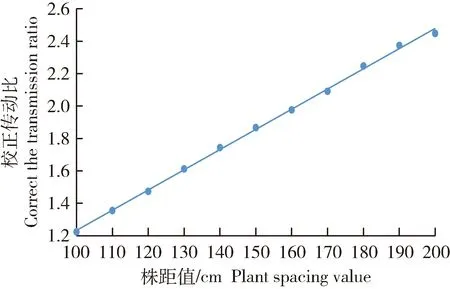
圖11 栽植株距與校正傳動比的擬合關系Fig.11 Fitting relationship between planting spacing and corrected transmission ratio
4.3 栽植精度測定試驗
栽植精度的評價指標包括栽植株距和栽植深度:栽植株距是指栽植行內相鄰兩棵葡萄苗木之間的直線距離;栽植深度是指根部底端到覆土表面的垂直距離。栽植深度合格率是指栽植深度為18~20 cm的株數與總株數的比值。
在長度為60 m的地塊上,拖拉機牽引葡萄苗木栽植機進行栽苗作業。每個株距進行4行作業,每行作業栽植25株苗木,即每次試驗共栽植100株苗木;栽植結束后,測量栽植株距和栽植深度;每次株距值重復試驗3次,試驗結果取平均值。
株距值分別為200、150和100 cm時,試驗得到的株距均值分別為200.07、150.08和100.18 cm,栽植深度合格率分別為97.67%、98.00%和97.34%,栽植精度滿足試驗要求。
4.4 栽植頻率測定試驗
栽植頻率是指單位時間內,栽植機栽植的全部葡萄苗木株數。
在長度為60 m的地塊上,拖拉機牽引葡萄苗木栽植機進行栽苗作業;株距值分別為200、150和100 cm時,分別以前進速度1、0.75和0.5 m/s進行作業。每種株距值下,每次試驗栽植100株葡萄苗木,栽苗過程中以秒表記錄作業時長;重復試驗3次,試驗結果取平均值。
株距值分別為200、150和100 cm時,栽植時間均值分別為198.74、200.20和200.38 s,栽植頻率分別為30.17、30.02和30.01 株/min,均滿足標準中栽植頻率≥30株/min的要求。
4.5 栽植質量測定試驗
栽植質量主要包括漏栽率、重栽率、倒伏率、埋苗率、露苗率、傷苗率、合格率等。其中,漏栽是指本應該有葡萄苗木的地方而沒有葡萄苗木;重栽是指本應該只有一棵葡萄苗木的地方有多棵葡萄苗木;倒伏是指葡萄苗木的主莖與地面的夾角<30°;埋苗是指葡萄苗木全部埋在土壤中;露苗是指葡萄苗木的主根或虛根裸漏在土壤外面,不能滿足栽植的農藝要求;傷苗是指葡萄苗木受到損傷,苗木的莖部產生破損的面積大小超過1 cm2。不產生以上情況的苗木即為栽植合格苗木。
在長度為60 m的地塊上,拖拉機牽引葡萄苗木栽植機進行栽苗作業。每種株距值下,每次試驗栽植100株葡萄苗木,栽苗完成后,觀察葡萄苗木的栽植情況,并記錄漏栽苗、重栽苗、倒伏苗、埋苗、露苗、傷苗的株數,并以此計算每種情況的苗木株數與全部苗木株數的比值;重復試驗3次,試驗結果取平均值。
當株距值分別為200、150和100 cm時,栽植合格率分別為97.67%、97.67%和97.37%,均滿足試驗標準。無漏栽、重栽、露苗、傷苗等現象,但是存在極少的倒伏和埋苗植株;3種株距下的倒伏率和埋苗率分別為1.33%和1.00%、1.67%和0.67%以及1.33% 和1.33%。苗木出現倒伏和埋苗現象的原因可以歸結為:由于葡萄苗木的根系生長情況(根系的長度等)各不相同,并且投苗人員存在操作偏差,使得夾持苗木的位置有輕微變化,造成苗木入土深度不一致;在相同的鎮壓力條件下,入土深度較淺的苗木會發生倒伏,入土深度更淺的苗木則會整株埋入土壤,產生埋苗現象,倒伏和埋苗情況均在整機性能要求的合理范圍內,滿足試驗標準要求。栽植效果見圖12。

圖12 栽植效果Fig.12 Planting effect
5 結束語
本研究主要依據葡萄苗木的外形尺寸和栽植農藝要求,設計了一種株距可調式葡萄苗木栽植機,可以一次性完成開溝、投苗、鎮壓、覆土等工作。
本研究所設計的株距可調式葡萄苗木栽植機,根據葡萄苗木的外形尺寸和栽植的農藝要求,選擇葡萄苗木較直的莖部作為夾持位置,確定了苗夾的尺寸和形狀,為降低葡萄苗木的倒伏率,提升苗木的栽植直立度,確定了開溝器與栽植機構的安裝位置:當株距值分別為200、150和100 cm時,開溝器支架中心線與栽植機構中心線的距離分別為245.0,267.5和290.0 cm,符合設計要求。
基于葡萄苗木栽植的農藝要求,設計了株距可調式控制系統,提高了栽植株距的準確性及株距調節的便利性,投苗人員可以根據需求選擇100~200 cm作為株距值。
在直流電機轉速靜態標定試驗中得到了電機轉速與 PWM 信號占空比的對應關系;栽植精度、栽植頻率和栽植質量的測定試驗表明,當設定的株距值分別為200、150和100 cm時,栽植的實際株距均值為200.07、150.08和100.18 cm,栽植深度均值為18 cm,栽植深度合格率均值為97.67%、98.00%和97.34%,最大栽植頻率為30株/min,無漏栽、重栽、露苗和傷苗現象,倒伏率均值為1.33%、1.67%和1.33%,埋苗率均值為1.00%、0.67%和1.33%,均滿足葡萄苗木栽植的作業要求。
猜你喜歡
小主人報(2022年1期)2022-08-10 08:28:44
新作文·小學低年級版(2021年9期)2021-11-27 07:57:46
學生天地(2020年17期)2020-08-25 09:28:54
作文成功之路·小學版(2020年7期)2020-08-24 08:19:30
少年博覽·初中版(2020年6期)2020-06-12 11:42:23
作文成功之路·小學版(2020年7期)2020-01-02 10:10:44
趣味(數學)(2018年12期)2018-12-29 11:24:10
小學生作文(中高年級適用)(2017年10期)2017-11-13 06:01:00
能源(2016年2期)2016-12-01 05:10:46
故事大王(2016年7期)2016-09-22 17:30:08