駛經(jīng)丁壩船舶水動(dòng)力特性數(shù)值研究
2023-09-09 02:39:30黃浩東李浩然
關(guān)鍵詞:船舶
冀 楠,黃浩東,羅 意,李浩然
(重慶交通大學(xué) 航運(yùn)與船舶工程學(xué)院,重慶 400074)
0 引 言
丁壩是常見(jiàn)的防洪護(hù)岸水工建筑物,在長(zhǎng)江等航道中分布廣泛。丁壩迎水面和背水面出現(xiàn)壅水、旋渦、下潛等三維特性,其束窄作用也使得丁壩流場(chǎng)水流形態(tài)變得復(fù)雜。船舶駛經(jīng)丁壩時(shí),會(huì)受到丁壩產(chǎn)生的水動(dòng)力干擾作用,對(duì)船舶的受力特性和航行的姿態(tài)產(chǎn)生較大的影響。不同的水流流速和船-丁壩相對(duì)位置是影響船舶水動(dòng)力的重要因素,因此合理的預(yù)測(cè)船舶駛經(jīng)丁壩時(shí)的水動(dòng)力特性對(duì)于船舶的操縱乃至安全航行有非常大的意義。相比于試驗(yàn)研究,數(shù)值模擬的方法更具成本和時(shí)間效益,并且對(duì)空間沒(méi)有固定的約束。
國(guó)內(nèi)外對(duì)丁壩的水流特性以及船舶經(jīng)過(guò)橋墩、船閘及限制水域等的水動(dòng)力特性進(jìn)行了較為豐富的研究,而鮮有研究船舶行駛過(guò)丁壩時(shí)的水動(dòng)力特性。N.MUNETA等[1]采用定床實(shí)驗(yàn)得到丁壩流場(chǎng)不同水深處的橫向和縱向流速,通過(guò)實(shí)驗(yàn)值和計(jì)算值的對(duì)比,來(lái)分析丁壩區(qū)的三維特性;R.MAYERLE等[2]采用三維數(shù)值模擬,并假設(shè)采用靜水壓力分布來(lái)解釋丁壩附近水流模式的差異,結(jié)合丁壩壩頭的靜水壓力的分布來(lái)分析對(duì)丁壩背水面渦旋分布的影響;程年生等[3]通過(guò)使用k-ε湍流模型模擬了丁壩區(qū)的二維流場(chǎng)特性,得出了丁壩流場(chǎng)湍動(dòng)能的分布和湍動(dòng)能的耗散率;許光祥等[4]通過(guò)實(shí)驗(yàn)數(shù)據(jù)對(duì)丁壩斷面的水位進(jìn)行分析,得到了計(jì)算丁壩臨近斷面水位變化值與丁壩束窄系數(shù)關(guān)系的經(jīng)驗(yàn)計(jì)算公式,為預(yù)測(cè)丁壩整治效果提供了有效的參考;馬崢等[5]通過(guò)對(duì)不同湍流模型在流場(chǎng)中的應(yīng)用進(jìn)行總結(jié),討論了CFD中船舶的湍流模型適用性以及選擇方法。由于方形系數(shù)相對(duì)較小,對(duì)于集裝箱類船,標(biāo)準(zhǔn)k-ε模型和SSTk-ω模型模擬效果相對(duì)較好;麻紹鈞[6]通過(guò)分析近岸航行時(shí)船舶的水動(dòng)力特性,對(duì)流場(chǎng)細(xì)節(jié)進(jìn)行分析,提供了一系列水動(dòng)力機(jī)理分析方法;張晨曦等[7-8]采用RNGk-ε湍流模型,分析了船舶經(jīng)過(guò)橋墩以及船-船相遇時(shí)的受力特性,并改變船-橋墩以及船舶之間的橫向距離對(duì)船舶的橫向力和轉(zhuǎn)艏力矩的影響,研究發(fā)現(xiàn)船舶經(jīng)過(guò)橋墩時(shí)所受的橫向力會(huì)出現(xiàn)明顯的峰值,轉(zhuǎn)艏力矩會(huì)出現(xiàn)由負(fù)到正的轉(zhuǎn)換,并且隨著船舶重心到橋墩的距離的減少,橫向力及轉(zhuǎn)艏力矩增加明顯。船舶之間縱向距離為一倍船長(zhǎng)左右時(shí)容易發(fā)生碰撞;李佳等[9]利用ADV(三維點(diǎn)式多普勒流速儀)檢測(cè)丁壩流場(chǎng),并通過(guò)測(cè)力天平和應(yīng)變數(shù)據(jù)收集儀器,測(cè)量船模在丁壩流場(chǎng)不同水流流速和不同船-丁壩相對(duì)位置下船模的橫向及縱向二維受力狀況。試驗(yàn)表明船舶經(jīng)過(guò)丁壩時(shí)受到的推力和吸力出現(xiàn)明顯的峰值,船舶位于丁壩軸線位置處時(shí)受力較大。
筆者利用計(jì)算流體力學(xué)軟件STAR-CCM+,用VOF法處理自由液面,采用不可壓縮流動(dòng)RANS方程以及Realizablek-ε湍流模型對(duì)丁壩的流場(chǎng)和船舶的受力狀態(tài)進(jìn)行數(shù)值模擬,并與試驗(yàn)對(duì)比以驗(yàn)證數(shù)值模擬的準(zhǔn)確性。然后用該數(shù)值模型模擬研究了船舶在丁壩流場(chǎng)航行時(shí),不同水流流速和船-丁壩相對(duì)位置時(shí)船舶的受力情況。
1 數(shù)值方法
基于RANS方法求解不可壓縮黏性流體流場(chǎng)的控制方程為雷諾平均連續(xù)性方程和雷諾平均N-S方程為:
(1)
(2)

采用Realizablek-ε湍流模型封閉上述方程組,其中,湍流動(dòng)能k和湍流耗散率ε的方程分別是:
(3)
(4)
式中:k為湍流動(dòng)能;ε為湍流耗散率;μt為湍流粘性系數(shù),其中μt表達(dá)式為:
(5)
式中:Cμ=0.09;C1=1.44;C2=1.9;σk=1.0,σε=1.2。
2 數(shù)值驗(yàn)證
2.1 丁壩流場(chǎng)模擬
2.1.1 計(jì)算區(qū)域
圖1(a)為丁壩計(jì)算模型的坐標(biāo)系及邊界條件示意圖,丁壩流場(chǎng)模擬的計(jì)算域設(shè)置參考J.JEON等[10]的實(shí)驗(yàn),并與其進(jìn)行對(duì)比驗(yàn)證。丁壩為直丁壩,坐標(biāo)系OXYZ原點(diǎn)位于丁壩1/2厚度面、丁壩所在岸壁側(cè)面和計(jì)算域底部平面的交點(diǎn)處,且X軸指向河道下游,Z軸垂直于底部平面朝上。為了更準(zhǔn)確說(shuō)明丁壩和船舶之間在X方向上的位置關(guān)系,特定義丁壩1/2厚度面和河道底面的交線為丁壩軸線。水槽模型長(zhǎng)為6.5 m,寬為0.9 m,高為0.262 5 m。水槽的初始水深為0.21 m,丁壩高度H為0.262 5 m,丁壩厚度D為0.04 m,丁坎長(zhǎng)度L為0.3 m,為非淹沒(méi)式直丁壩。計(jì)算域水流入口位于丁壩軸線前1.5 m的位置,入口處水流流速為U0=0.144 m/s,進(jìn)口水流量恒定為Q=0.027 m3/s。丁壩模型的入口和頂部為速度進(jìn)口(velocity inlet),出口為壓力出口(pressure outlet),其他邊界都為壁面(wall)。

圖1 網(wǎng)格及探針線布置示意Fig. 1 Schematic diagram of grid and probe line layout
2.1.2 計(jì)算模型驗(yàn)證

圖1(b)為探針線的布置示意圖和丁壩模型Z=0.105 m平面以及丁壩縱截面網(wǎng)格圖。選取丁壩附近流速變化較大的位置設(shè)置4根探針線,分別位于X/L=-3.30、-0.90、1.67、3.33處,探測(cè)范圍為Y=0~0.9 m。其中探針線布置從左至右依次是探針線1、2、3、4。
從圖2中可以看出,s2和s3的模擬結(jié)果基本一致,整體的模擬結(jié)果要好于s1,在綜合考慮計(jì)算精度與計(jì)算資源的限制后,最后采用s2的網(wǎng)格參數(shù)作為后續(xù)工況計(jì)算的網(wǎng)格設(shè)置。

圖2 不同探針線處X向流速模擬值與實(shí)驗(yàn)值比較Fig. 2 Comparison between the simulated values of X-direction velocity at different probe lines and the experimental values
2.2 船舶阻力數(shù)值計(jì)算
2.2.1 計(jì)算模型
選取KCS船模為研究對(duì)象,該船模為2010年哥德堡研討會(huì)[11]推薦的標(biāo)準(zhǔn)實(shí)驗(yàn)船型,船模的垂線間長(zhǎng)Lpp為7.278 6 m,與實(shí)船的縮尺比為1∶31.6。KCS雖為海船船型,但其船型的長(zhǎng)、寬、吃水與長(zhǎng)江過(guò)閘船型集-18[12]的相應(yīng)參數(shù)基本呈2∶1的尺度比,二者船型相似;另外,雖然KCS船型的方形系數(shù)0.65比集-18的方形系數(shù)0.53大,但根據(jù)船舶原理[13]中關(guān)于方形系數(shù)對(duì)船舶阻力影響的敘述可知,在下文低于1.2 m/s的水流流速范圍內(nèi),方形系數(shù)差異造成的船型阻力變化僅為10%左右,因此,采用KCS船型進(jìn)行內(nèi)河船的水動(dòng)力特性研究是可行的。
2.2.2 計(jì)算域與邊界條件
計(jì)算域示意如圖3。計(jì)算域的長(zhǎng)度為4倍Lpp,左右邊界和上下邊界長(zhǎng)度為3倍Lpp,水深為2倍Lpp,入口(inlet)、頂部(top)、底部(bottom)為速度入口,出口(outlet)為壓力出口,左右邊界(side、symmetry)為對(duì)稱邊界。在出口邊界進(jìn)行了消波。

圖3 計(jì)算域Fig. 3 Computational domain
2.2.3 網(wǎng)格劃分
計(jì)算域的網(wǎng)格劃分如圖4。為保證計(jì)算結(jié)果的精確性,在船周圍進(jìn)行局部加密。同時(shí),為捕捉船舶的興波波形,不僅對(duì)自由液面進(jìn)行整體加密,還在尾流區(qū)進(jìn)行了局部加密。網(wǎng)格劃分Y+值控制在30~200內(nèi)。


圖4 計(jì)算網(wǎng)格Fig. 4 Computational grid
2.2.4 網(wǎng)格無(wú)關(guān)性與模型驗(yàn)證


表1 模擬總阻力系數(shù)與實(shí)驗(yàn)對(duì)比Table 1 Comparison of the simulated total resistance coefficients and experiment
(6)
式中:Cd為阻力系數(shù);Fd為總阻力,N;v為水流流速,m/s;A為船舶的濕表面積,m2。
在綜合考慮計(jì)算精度以及計(jì)算資源的限制后,最后采用S2的網(wǎng)格參數(shù)作為后續(xù)模擬的網(wǎng)格設(shè)置。
3 計(jì)算結(jié)果及分析
3.1 計(jì)算工況
分別設(shè)置了3個(gè)水流流速和9個(gè)船-丁壩相對(duì)位置,其中:3個(gè)水流流速分別為v=0.6、0.9、1.2 m/s(對(duì)應(yīng)的傅汝德數(shù)Fr=0.135、0.203、0.271),船-丁壩相對(duì)位置定義為船舶重心距離丁壩軸線位置的距離,其值分別為X/Lpp=-2.00、-1.00、-0.50、-0.25、0、0.25、0.50、1.00、2.00,同時(shí)放開(kāi)船舶升沉、縱傾、橫傾3個(gè)自由度。圖5為坐標(biāo)系、邊界條件和船只擺放位置示意。(以船舶位于X/Lpp=0位置處為例)。
3.2 丁壩后流場(chǎng)的時(shí)域分析
圖6為水流流速0.9 m/s,計(jì)算時(shí)間t=350 s時(shí),船舶位于不同船-丁壩相對(duì)位置處的瞬時(shí)流場(chǎng)圖。如圖6,船舶的存在會(huì)對(duì)丁壩后的流場(chǎng)產(chǎn)生擾動(dòng),無(wú)船時(shí)的純丁壩繞流會(huì)在丁壩后形成穩(wěn)定單一的漩渦,但有船時(shí)丁壩后的高流速帶(上部區(qū)域)和低流速帶(下部區(qū)域)不再穩(wěn)定,發(fā)生橫向交替擺動(dòng),流速帶的擺動(dòng)和漩渦變化分析如圖7;在同一時(shí)刻點(diǎn),船舶位于不同船-丁壩相對(duì)位置處的流場(chǎng)形態(tài)并不相同,說(shuō)明船-丁壩相對(duì)位置會(huì)對(duì)丁壩后流場(chǎng)的擺動(dòng)周期產(chǎn)生一定影響。

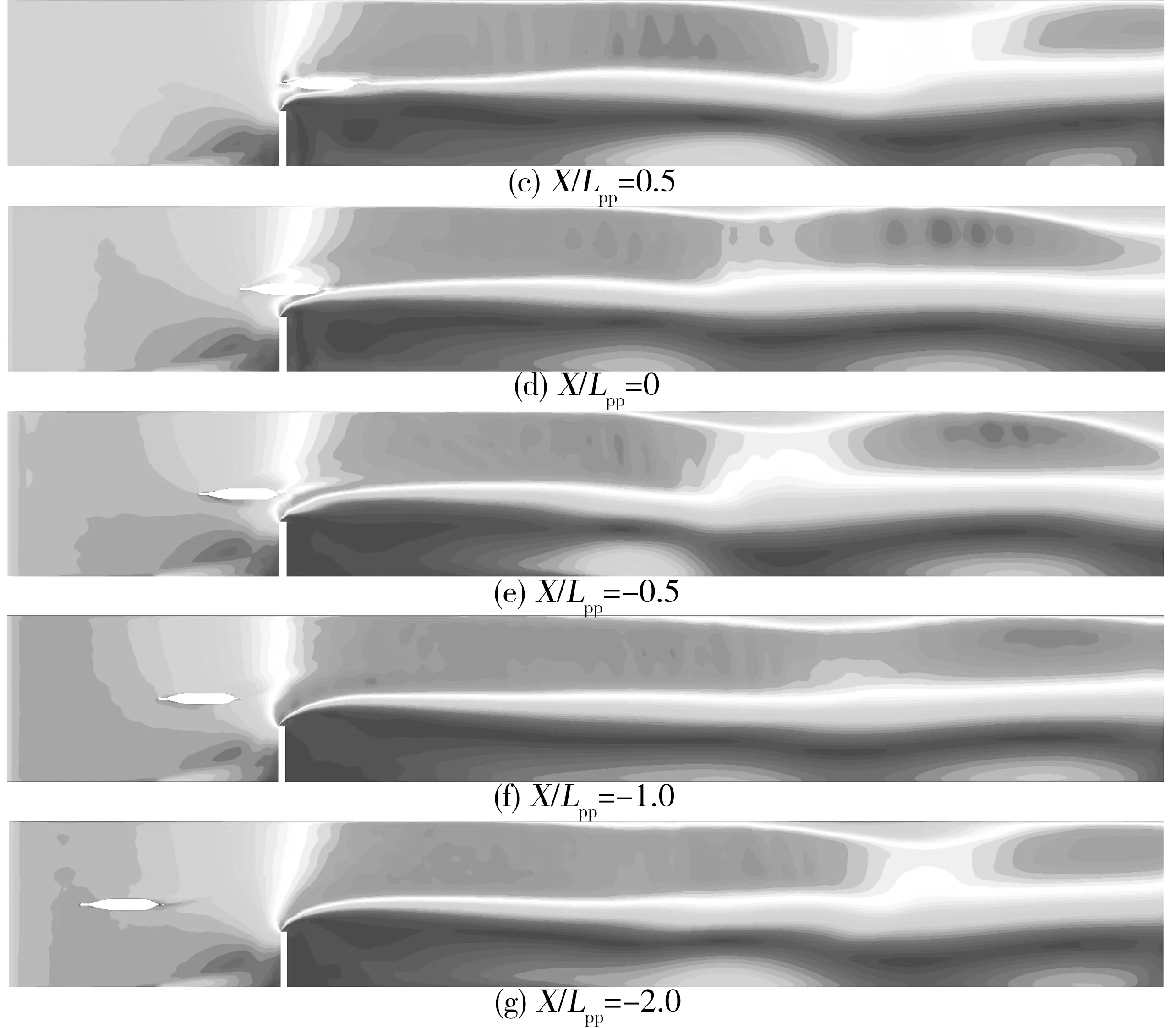
圖6 v=0.9 m/s時(shí)船舶重心平面流速分布Fig. 6 The plane velocity distribution of the ship’s center of graving when v=0.9 m/s

圖7 v=0.9 m/s,X/Lpp=0.25時(shí)壩后流場(chǎng)周期性擺動(dòng)示意(t=373~423 s)Fig. 7 Schematic diagram of periodic oscillation of flow field behind the spur dike when =0.9m/s, v=0.9 m/s, X/Lpp=0.25,(t=373~423 s)
圖7為水流流速為0.9 m/s,船舶位于X/Lpp=0.25工況點(diǎn)下,壩后高流速帶和低流速帶在一個(gè)周期T內(nèi)的擺動(dòng)情況示意。可以看出,在一個(gè)周期內(nèi),上部的高流速帶中先形成高流速核心區(qū),如圖7(d),之后又逐漸消失;低流速帶中的2個(gè)漩渦核心則先融合成一個(gè)與高流速核心區(qū)上下對(duì)應(yīng)的單一漩渦,之后又分裂為2個(gè)漩渦。
3.3 船舶受力分析
3.3.1 船舶橫向受力沿程分析
圖8(a)為不同流速下,船舶在距離丁壩不同位置處的橫向受力曲線圖。船舶所受的橫向力的正負(fù)規(guī)定為,沿Y軸正向的力為正,反之為負(fù)。從圖8(a)可以看出,隨著水流流速的增加,船舶在靠近丁壩的位置處(-1 圖8 不同流速下船舶沿程受力及力矩變化情況Fig. 8 Changes in forces and moments of ships along the way under different flow speeds 從圖9的壓力及速度云圖中可以看出,船舶從X/Lpp=0.5位置開(kāi)始,逐漸從低壓區(qū)向高壓區(qū)移動(dòng),船舶位于X/Lpp=-0.25位置時(shí),由于丁壩的繞流,此時(shí)船舶靠近丁壩一側(cè)與遠(yuǎn)離丁壩一側(cè)壓強(qiáng)差最大,船舶的存在阻擋了水流的橫向發(fā)展。隨著水流流速的增加,橫向力峰值出現(xiàn)的位置有向下移動(dòng)的趨勢(shì),在0.6、0.9 m/s流速下,橫向力的峰值出現(xiàn)在X/Lpp=-0.5附近,而流速增大為1.2 m/s時(shí),橫向力出現(xiàn)峰值的位置向丁壩軸線移動(dòng),出現(xiàn)在X/Lpp=-0.25附近,此時(shí)丁壩的繞流造成的橫向水流流速較大。而X/Lpp=0位置相對(duì)X/Lpp=0.5位置,船舶左右兩側(cè)的壓力數(shù)值均急劇減小,但船舶左側(cè)高壓區(qū)的面積減小更快,這使得雖然船舶仍受到數(shù)值為正的橫向力,但船體兩側(cè)的壓力差減小了,也就是船舶所受橫向力減小了。 圖9 v=1.2 m/s時(shí)船舶重心平面壓力分布及流速分布(局部)Fig. 9 The plane pressure and velocity distribution of the ship’s center of gravity when v=1.2 m/s (Local) 3.3.2 船舶縱向受力沿程分析 圖8(b)為不同流速下,船舶在距離丁壩不同位置處的縱向受力曲線圖;縱向力的正負(fù)規(guī)定為,沿X軸正向?yàn)檎?反之為負(fù)。圖8(b)中可以看出,在3個(gè)水流流速下,船舶所受到的縱向力沿程變化趨勢(shì)基本一致。在相同位置處,隨著水流流速的增大,船舶受到的縱向力也隨之增大。在丁壩前后一倍Lpp范圍內(nèi)(-1 3.3.3 船舶轉(zhuǎn)艏力矩沿程分析 圖8(c)為不同流速下,船舶在距離丁壩不同位置處的轉(zhuǎn)艏力矩變化曲線圖。轉(zhuǎn)艏力矩的正負(fù)規(guī)定為沿Z軸正向逆時(shí)針旋轉(zhuǎn)為正,反之為負(fù)。從圖8(c)中可以看出,流速越大,轉(zhuǎn)艏力矩的幅值越大。轉(zhuǎn)艏力矩的變化曲線圖有峰值和谷值,且轉(zhuǎn)艏力矩在X/Lpp=-0.5附近由正變負(fù)。當(dāng)水流流速為0.6、0.9 m/s時(shí),轉(zhuǎn)艏力矩峰值出現(xiàn)在X/Lpp=0.25附近處,而在1.2 m/s的水流流速下,轉(zhuǎn)艏力矩的峰值移動(dòng)到X/Lpp=0.5附近。 從圖9(a)中可以看出,由于丁壩的繞流和束窄作用,導(dǎo)致丁壩軸線位置處橫向水流流速較高,船舶位于X/Lpp=0.5位置處,船艏部位受到較高的水流沖擊,水流流速在此處驟減而產(chǎn)生的低速高壓區(qū),使得船舶在此處受到的轉(zhuǎn)艏力矩最大。而船舶位于X/Lpp=-0.5位置處時(shí),船舶左側(cè)水流只能通過(guò)船體尾部和丁壩之間的狹窄間隙向下游泄出,水流流速增大,相應(yīng)的造成船舶左舷壓力降低,船舶左、右舷的壓強(qiáng)差導(dǎo)致船舶在此處受到的轉(zhuǎn)艏力矩為負(fù)。而船舶繼續(xù)向壩前移動(dòng),船舶左右兩側(cè)的壓強(qiáng)差減少,故而船舶受到的轉(zhuǎn)艏力矩逐漸減少。 3.4.1 船舶橫搖分析 圖10(a)為不同流速下,船舶的橫搖變化曲線圖。船舶橫搖的正負(fù)規(guī)定為:船舶左傾為正,右傾為負(fù)。從圖10(a)中可看出:當(dāng)水流流速為0.6、0.9 m/s時(shí),船舶的沿程橫搖出現(xiàn)了2個(gè)明顯的正負(fù)峰值,分別位于X/Lpp=0和X/Lpp=-0.5。當(dāng)船舶位于X/Lpp=0處,丁壩前受丁壩阻擋而變成橫向流動(dòng)的水流,再次遇到船體阻擋,只能從丁壩和船體之間的空當(dāng)向右側(cè)流動(dòng),相應(yīng)的水流流速更大,使得船體左側(cè)的壓力降低,船舶產(chǎn)生左傾,圖11對(duì)船體3個(gè)界面的壓力分析也可印證這個(gè)現(xiàn)象。圖11中,船舶位于X/Lpp=0處,船舶的3個(gè)不同橫截面流場(chǎng)壓力圖,船舶左側(cè)下方出現(xiàn)明顯的低壓區(qū),左右兩側(cè)的壓強(qiáng)差使得船舶出現(xiàn)左傾,表現(xiàn)為橫搖出現(xiàn)正向的峰值,這是由于丁壩的束窄作用,船舶左舷和丁壩之間的縱向水流高速發(fā)展而產(chǎn)生的低壓區(qū),船舶右舷流速相對(duì)較低,因此壓強(qiáng)較高。同理對(duì)船舶位于X/Lpp=-0.5位置處,船體與丁壩之間的空當(dāng)靠近船體尾部,高速水流產(chǎn)生的低壓區(qū)也逐漸遠(yuǎn)離船體,船體左側(cè)附近的水流因船體阻擋而流速降低,壓力增大,而船舶右舷水流流速相對(duì)較高,因而產(chǎn)生的低壓區(qū)使得船舶出現(xiàn)右傾,橫搖值出現(xiàn)負(fù)向的峰值。而水流流速增至1.2 m/s,船舶位于X/Lpp=0.25左右時(shí),丁壩的束窄作用導(dǎo)致壩后橫向水流流速較大且高流速區(qū)范圍較廣,此時(shí)船舶左右舷水流流速差別不大,導(dǎo)致船舶在此處橫搖值出現(xiàn)明顯的凹值。 圖10 不同流速下船舶橫搖、縱搖、升沉沿程變化情況Fig. 10 Changes of the ship’s roll, pitch and heave along the way under different flow rates 3.4.2 船舶縱搖分析 圖10(b)為不同流速下,船舶的縱搖變化曲線圖。船舶的縱搖正負(fù)規(guī)定為:沿Y軸正向順時(shí)針旋轉(zhuǎn)為正,逆時(shí)針旋轉(zhuǎn)為負(fù)。從10(b)中可看出:不同流速下,船舶的橫搖沿程變化的規(guī)律基本一致,船舶的縱搖峰值出現(xiàn)在X/Lpp=-0.25附近處。隨著水流流速的增加,船舶的縱搖峰值出現(xiàn)向壩前移動(dòng)的趨勢(shì),且基本滿足隨水流流速增大,縱搖值增大的趨勢(shì)。在靠近丁壩的范圍內(nèi)(-1 3.4.3 船舶升沉分析 圖10(c)為不同流速下,船舶的升沉變化曲線圖。船舶的升沉正負(fù)規(guī)定為沿Z軸正向移動(dòng)為正,反之為負(fù)。從圖10(c)可看出:在3個(gè)水流流速下,船舶的升沉值變化規(guī)律基本一致。由于丁壩的束窄作用導(dǎo)致河道的過(guò)水?dāng)嗝婷娣e減少,流速越高,丁壩前的壅水量越多,丁壩前水位越高,船舶從丁壩軸線開(kāi)始向壩前移動(dòng),由于水位不斷上升導(dǎo)致船舶被抬升;船舶在壩前距離丁壩相同位置處,流速越高,上升值越大。由于丁壩前后的水面比降較大,在這一區(qū)域(-1 筆者通過(guò)CFD數(shù)值計(jì)算的方法,對(duì)不同水流流速下船舶沿設(shè)有丁壩的航道中線行駛時(shí)的水動(dòng)力性能做了數(shù)值模擬,得出了船舶在駛過(guò)丁壩時(shí)的受力、力矩的變化情況,以及船舶的橫搖、縱搖、升沉的變化趨勢(shì)。通過(guò)研究得到以下結(jié)論: 1)船舶的存在使得丁壩后的流場(chǎng)發(fā)生不穩(wěn)定的橫向擺動(dòng)。在一個(gè)擺動(dòng)周期內(nèi),高流速帶中先形成高流速核心區(qū),之后又逐漸消失;低流速帶中的2個(gè)漩渦核心則先融合成一個(gè)與高流速核心區(qū)上下對(duì)應(yīng)的單一漩渦,之后又分裂為2個(gè)漩渦。 2)丁壩軸線附近(-0.5 3)船舶在丁壩軸線位置時(shí)會(huì)因?yàn)榭拷蝹?cè)的高速低壓區(qū)而向丁壩發(fā)生傾斜,而在丁壩上游(X/Lpp=-0.5)則會(huì)因?yàn)闄M向推力的發(fā)展,加上丁壩的束窄作用導(dǎo)致遠(yuǎn)離丁壩側(cè)流速高壓強(qiáng)低而遠(yuǎn)離丁壩方向傾斜。由于丁壩的壅水作用,船舶從丁壩下游開(kāi)始隨水位的升高而被抬高,且流速越大,升沉的幅值越大。

3.4 船舶姿態(tài)沿程變化分析

4 結(jié) 論
猜你喜歡
艦船科學(xué)技術(shù)(2022年14期)2022-09-22 03:08:26艦船科學(xué)技術(shù)(2022年14期)2022-09-22 03:07:40機(jī)械工業(yè)標(biāo)準(zhǔn)化與質(zhì)量(2022年6期)2022-08-12 02:07:42艦船科學(xué)技術(shù)(2022年2期)2022-03-29 01:12:44船舶(2021年4期)2021-09-07 17:32:22小哥白尼(趣味科學(xué))(2019年10期)2020-01-18 09:16:22船舶標(biāo)準(zhǔn)化工程師(2019年4期)2019-07-24 07:21:12軍工文化(2017年12期)2017-07-17 06:08:06中國(guó)船檢(2017年3期)2017-05-18 11:33:09船海工程(2015年4期)2016-01-05 15:53:30
