大型復雜任務航天器快速交會對接軌道優化設計
2023-09-09 06:59:18商帥范高潔王震柏林厚馬艷紅駱子豪
航天器工程 2023年4期
關鍵詞:設計
商帥 范高潔 王震 柏林厚 馬艷紅 駱子豪
(1 北京空間飛行器總體設計部,北京 100094)(2 中國載人航天工程辦公室,北京 100034)(3 北京控制工程研究所,北京 100094)
交會對接技術從20世紀60年代由美、蘇兩國率先開始探索。早期交會對接稱為直接交會,一般2個飛行器先后入軌且軌道高度和軌道相位相差非常小,因此交會對接時長一般在1小時左右。該時期交會對接技術主要用于技術探索,對運載器等其他系統指標要求非常高,從而導致任務成功率不高。空間站時期逐步發展為成熟可靠的2~5天交會對接模式,期間經歷多次變軌修正逐步縮小距離和速度偏差。交會對接近距離段又因為有人操作和無人操作分為自主交會對接和手控交會對接[1]。為減少航天員在飛船中的等待時間并適應日益活躍的航天活動,2012年,俄羅斯進步號貨運飛船首次進行了快速交會對接試驗,在繞地球軌道飛行4圈之后,成功與“國際空間站”對接[2]。如今快速對接技術已經成為載人交會對接的發展趨勢[3-4]。
我國交會對接技術從21世紀初進入快速發展階段,2011年神舟八號首次與天宮一號空間實驗室完成交會對接[5-6]。交會對接過程主要分為遠距離導引段和近距離自主控制段。其中,遠距離導引段由地面控制,根據精密測定軌結果規劃5次軌道控制,修正兩目標相位差和軌道面偏差,瞄準目標飛行器后下方的共面圓軌道。基于地面遠距離導引的交會對接策略對地面控制依賴性較強,且在天地交互中,每兩次變軌之間需要3個軌道周期的時間用于精密測定軌、導引策略計算、飛行程序生成和上注,總交會對接時長約需數天。為適應載人航天快速、高效、自主的發展趨勢,在此基礎上,我國開始進行自主快速交會對接技術研究。與原技術相比,自主快速交會對接主要差異在遠距離導引段不依賴地面控制[7]。主動飛行器根據衛星導航設備計算飛行軌道,再根據目標飛行器軌道根數自主計算兩目標相對關系,規劃變軌策略進行交會對接。由于不依賴地面測定軌數據和策略計算,遠距離導引段采用準霍曼變軌,最短每間隔半圈即可進行1次軌道控制。遠距離導引段第一次脈沖在入軌后第一個遠地點(入軌后約45min)即可執行,使得遠距離導引段時長由2天縮短為4.5h,大大提高了交會對接效率[8-9]。
快捷交會的關鍵技術包括:①運載的射入精度;②主動飛行器的快速軌道測量與軌道控制精度;③主動飛行器的自主計算、自主機動與自主交會能力;④目標飛行器的軌道調整精度;⑤快速交會的測控條件[10]。
本文結合復雜任務航天器入軌后的任務安排和運載火箭入軌特性,分析了軌道偏差的分布特性,并制定了適應性的變軌策略和實施方法,優化設計了一套新型快速交會對接軌道方案。
1 主動飛行器軌道設計
1.1 主動飛行器正常軌道設計
交會對接中一個重要的指標是兩個航天器的相位差。通常航天器入軌后在半個軌道周期內完成變軌策略的計算和軌道機動,及時抬升軌道高度并完成軌道誤差修正。對于大噸位航天器搭載大推力運載火箭在入軌精度上由于采用低溫推進劑,存在寬發射窗口特征。此外,對于攜帶有大尺寸中繼天線和柔性太陽翼等設備的航天器,在發射前處于收縮壓緊狀態,入軌后需要及時引爆火工品進行展開并進行關鍵功能測試,在此期間不實施變軌,而與運載分離時刻的軌道偏差會隨著飛行時間的變長而增大,快速交會對接遠距離導引段起始時刻軌道偏差尤其是相位偏差也更大,因此要求航天器在軌道設計上對軌道偏差的適應性要更強。
在初始時刻,目標飛行器軌道高度一般約400km,主動飛行器初始入軌高度約200km,主動飛行器的軌道高度低于目標飛行器,其軌道角速度也略大[11],因此主動飛行器的相位小于目標飛行器,兩飛行器相位差為
Δφ=φtr-φca=
(1)

由式(1)可以看出:影響相位差的主要因素包括入軌點緯度幅角、軌道半長軸和實際發射時刻,其中軌道半長軸可以用軌道周期表示
(2)

表1所示為軌道相位在不同入軌偏差組合下隨飛行時長的演化情況。可以看出:與無偏差軌道相比,隨著軌道外推時間變長,相位偏差也越來越大。因此,在航天器具備變軌能力后應盡快在合適軌道位置完成軌道機動。若航天器在入軌后的初期內不具備實施軌道控制條件,最惡劣情況下,2個軌道周期后進入快速交會對接時相位偏差約為±7.1°。對于目前常用的多圈快速交會對接,其調相范圍通常都比較小,例如“國際空間站”交會對接軌道控制經驗顯示6h快速交會對接初始相位角可適應的范圍為20°~25°,即偏差范圍為±2.5°[5],無法滿足復雜任務航天器最大的相位偏差需求。
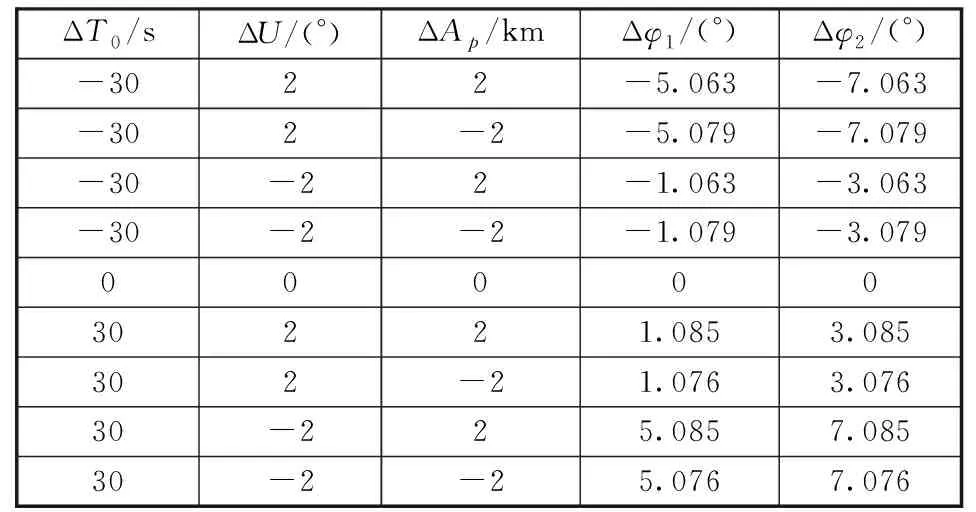
表1 入軌誤差外推后引起相位偏差Table 1 Oribt phase deviation caused by injection error
快速交會對接要求遠距離導引起始時刻兩飛行器相位差大于某一臨界值,即Δφ≥φ0。因此理論上可以通過在主動飛行器發射前調節目標飛行器的軌道相位,從而增大入軌時刻兩飛行器的相位差,對于增大的相位稱之為預留相位。根據表1入軌偏差分析結果,在理想無偏差軌道中快速交會對接起始時刻兩飛行器相位差應滿足Δφ≥φ0+7.1°。在本文的軌道設計中,預留相位等于主動飛行器一個軌道周期內與目標飛行器相位差的變化設為Δφ=φ0+10°,并且在遠距離導引段開始前增加一次相位追及脈沖和軌道面修正脈沖用于適應相位偏差和發射時刻不確定帶來的升交點赤經偏差。以上設計有3個優勢:一是只增加了一個軌道周期,仍具備快速交會對接能力,使得航天器在能源故障時盡快對接組合體,提高了航天器的故障適應能力;二是預留相位差比實際偏差大,軌道適應余量更寬裕;三是在入軌偏差較小時減少了變軌次數,即當火箭入軌偏差較小時,理想情況下可無控飛行一圈進行相位追及后滿足快速交會對接相位要求。
根據本文設計方法,將航天器入軌后至交會對接完成分為以下幾個階段,包括入軌初期段、修正段、遠距離導引段和自主控制段。
(1)入軌初期段:航天器入軌后進行平臺設置和在軌測試。平臺設置主要包括中繼天線的展開、太陽翼一次展開、機械臂解鎖、發動機測試、敏感器測試等。
(2)修正段:修正段主要用于修正火箭入軌偏差過大導致的航天器快速交會對接遠距離導引段入口條件不滿足的問題。當入軌后相位偏差較大,在修正段增加一次脈沖修正,調整相位使得滿足遠距離導引段入口條件。當軌道面偏差較大時,增加一次脈沖修正升交點赤經偏差。入軌小偏差情況下修正段可不執行變軌脈沖,即入軌3個軌道周期后,滿足遠距離導引段入口條件則進入快速交會對接。
(3)遠距離導引段:遠距離導引段包括大相位追及和調相與綜合修正段。大相位追及是為適應火箭推遲發射等情況造成的兩目標器相位差過大;零窗口發射且入軌偏差較小時,無大相位追及段,完成修正后直接進入下一階段。調相與綜合修正段共執行6次脈沖,軌道面內采用準霍曼變軌方式,軌道面修正采取兩次分別修正軌道傾角和升交點赤經,遠距離導引段各次脈沖功能見表2,與常用快速交會對接遠距離導引段6次脈沖相比,增加了2次軌道修正,適應性更強。
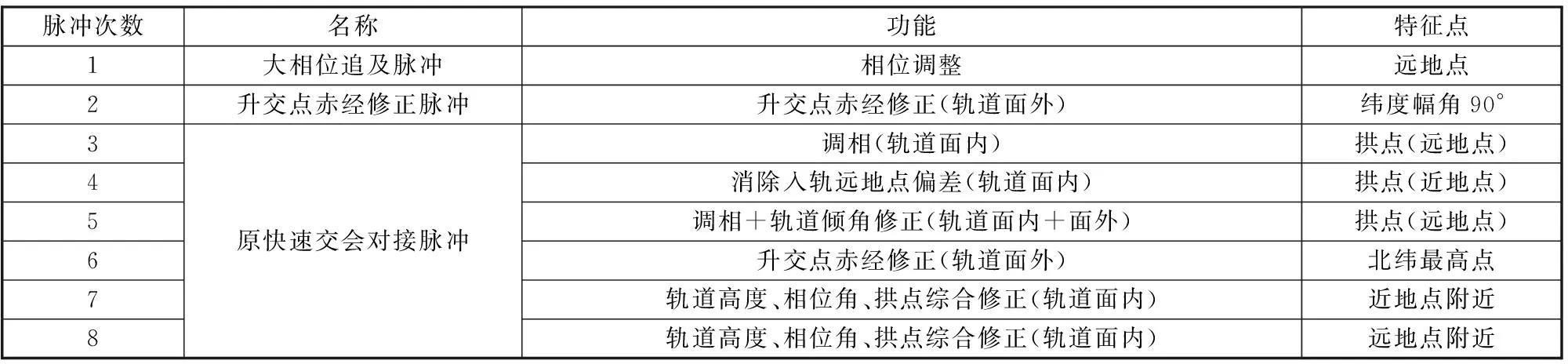
表2 快速交會對接變軌策略Table 2 Strategy of quick rendezvous and docking
(4)自主控制段:利用微波雷達、激光雷達、光學測量敏感器等相對測量設備提供的測量信息,由目標飛行器后下方52km處通過多次自主變軌接近目標器,直到完成對接,可分為尋的段、接近段和平移靠攏段。尋的段是遠距離導引段和近距離自主控制段的過渡段,起始點為目標飛行器后下方52km,終點為目標飛行器后方5km。采用綜合霍曼變軌和C-W制導,消除遠距離導引段控制誤差和軌道制導誤差。從尋的段終點到對接接觸過程中依次設立“400m保持”、“200m保持”和“19m保持”3個停泊點用于狀態確認,要求確認點位于測控區范圍內下行遙測數據[13]。
在首窗口標稱情況下,從發射入軌至對接完成,總時長為8.5個軌道周期,考慮入軌軌道偏差時,根據本設計方法,在相位偏差為負且超過-3°時,進入軌道修正段,但是總交會對接時長可保持不變。在相位偏差為正且超過3°時,每增加10°,總交會對接時長增加1個軌道周期。不同相位偏差對應交會對接時長見表3。
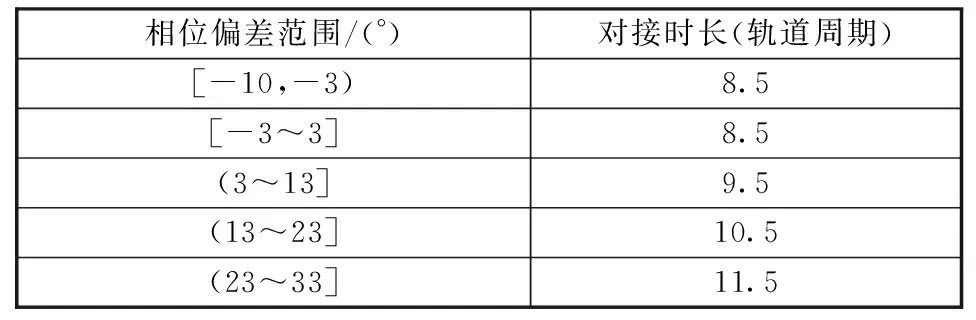
表3 不同相位特征對應交會對接時長Table 3 Rendezvous and docking time of the different phase deviation
1.2 推遲發射軌道設計
本文設計方法適用于全相位交會對接。在發射前若產生推遲發射,為節省推進劑消耗,目標飛行器不再針對進行新發射窗口進行調相控制。主動飛行器可適應推遲發射帶來的軌道變化,包含軌道面內和面外。
1)軌道面內
在運載推遲發射時,根據目標飛行器組合體軌道高度約400km分析,每推遲1天,主動飛行器入軌時兩目標相位差增大約120°。
根據上述軌道設計總體方案,在大相位時,入軌初期段平臺設置和平臺測試仍保持不變。平臺設置和平臺測試段完成后進入全相位快速交會對接模式,在該模式下首先進行大相位追及,N個軌道周期后執行6次調相脈沖,進入自主控制段直到交會對接完成。
2)軌道面外
推遲發射與首窗口發射相同,不影響軌道面外偏差。推遲發射在計算發射時刻時,兩種偏差在運載發射前通過火箭的入軌軌道傾角偏置和發射時刻偏置使得在軌對兩種偏差的修正盡可能小。入軌后兩種偏差仍通過在軌兩次脈沖修正,偏差修正相對獨立。
經過分析,在推遲1天發射情況下,遠距離導引段大相位追及圈次為9至15圈,總交會對接共需17.5至23.5圈。在推遲2天發射情況下,遠距離導引段大相位追及圈次為18至27圈,總交會對接需26.5至35.5圈。
2 變軌策略計算與實施
在規劃上,對于不具備自主計算變軌策略能力的航天器,設計了一套基于地面設備計算制導策略的天地數據交互方法。如圖1所示,在測控區內航天器通過天地網絡下傳定位遙測數據和動力學模型參數,地面計算快交制導脈沖并生成數據塊遙控幀上注至航天器控制計算機(GNCC)后自主按序列執行。在不占用器上資源情況下可實施快速交會對接。
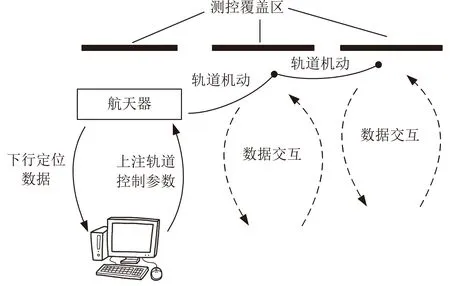
圖1 導引策略計算天地交互示意圖Fig.1 Schematic diagram of the spacecraft-ground interaction for guidance strategy computation
3 仿真驗證
分別取發射時刻偏差2.5min、軌道周期偏差±30s、緯度幅角偏差±2°和近地點高度偏差±2km進行入軌后的相位漂移特性脈沖執行情況及交會對接時長打靶仿真。其中,每項偏差按照等間隔選取進行遍歷見表4。
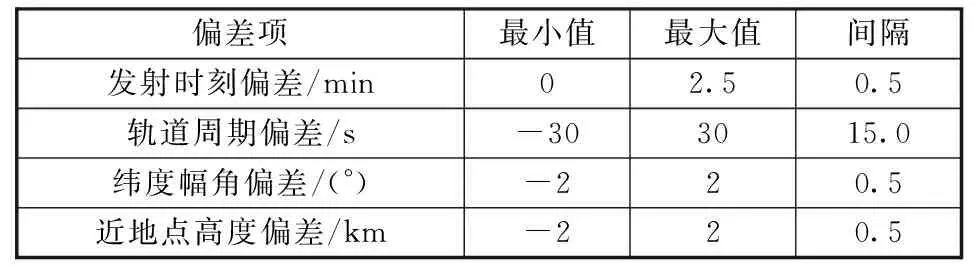
表4 打靶仿真入軌誤差項選取Table 4 Items selection of the orbit injection error for simulation
圖2為在給定的軌道初始偏差條件下的軌道相位分布特征,橫軸表示打靶中不同的入軌偏差組合,以仿真次數表示,縱軸為相位角偏差,參考值為零偏差入軌后無控飛行2個軌道周期后的相位。圖3為在不考慮發射時刻偏差時,相位角偏差極大值為7°,極小值為-7°,和表1分析結果一致,在考慮發射時間推遲2.5min后,相位角偏差極大值進一步增大約10°,極大值為17°。在此特征下,航天器入軌后轉入快速交會對接時間也不相同。在相位角偏差極小值至-3°范圍內,按照交會對接階段劃分,快速交會對接時刻提前一個軌道周期,在約2個軌道周期進入修正段執行修正脈沖。在其他范圍內,轉入快速交會對接時間約在3個軌道周期,和設計結果一致。圖4為在打靶中遠距離導引脈沖執行次數與軌道面內和面外偏差關系,仿真結果表明:6~8次脈沖可以滿足所有的入軌偏差組合。圖5的打靶仿真結果表明:在給定的初始軌道偏差下,總交會對接時長分別為8.5、9.5、10.5個軌道周期,與表3分析結果一致。

圖2 快速交會對接前軌道相位漂移特性Fig.2 Phase propagatecharacteristic before quick rendezvous and docking
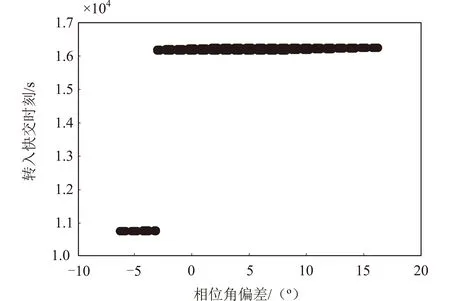
圖3 不同相位特征下轉入快速交會對接時刻分布Fig.3 Distribution of the quick rendezvous and docking start time under different phase deviation
打靶仿真結果表明:軌道設計可以適應給定的入軌精度,遠距離導引脈沖次數為6~8次,總交會對接時長最短8.5個軌道周期,最長10.5個軌道周期,并且第一次變軌時間不早于2個軌道周期,滿足任務需求。
4 在軌驗證
航天器入軌后按照預期程序進行了平臺狀態設置和測試。根據軌道外推特征,與理想軌道相比,航天器相位偏差小于1°,升交點赤經偏差導致的軌道面修正脈沖小于1m/s。按照本文軌道設計與仿真驗證,滿足快速交會對接條件,且修正段第1脈沖和第2脈沖可省略,遠距離段共執行6次變軌。經過自主控制段尋的、接近、平移和靠攏,航天器最終圓滿完成交會對接任務。
5 結束語
本文設計了一種適用于我國大型復雜任務航天器的快速交會對接軌道,給出了主動飛行器軌道設計方法和適應能力以及任務實施過程。經過分析本文設計方法具有如下特點:①適應了復雜任務航天器入軌初期狀態設置時間長的特點;②適應運載器寬發射窗口和大入軌偏差下的軌道特性;③采用天地協同方式計算變軌策略,適應了自主導航與地面制導相結合的應用場景。該方法經過交會對接成功驗證,對未來拓展任務中航天器的交會對接軌道設計具有借鑒意義。
猜你喜歡
河北畫報(2020年8期)2020-10-27 02:54:06
現代裝飾(2020年7期)2020-07-27 01:27:42
流行色(2020年1期)2020-04-28 11:16:38
電子制作(2019年19期)2019-11-23 08:41:36
電子制作(2019年15期)2019-08-27 01:11:50
電子制作(2019年7期)2019-04-25 13:18:16
藝術啟蒙(2018年7期)2018-08-23 09:14:18
海峽姐妹(2017年7期)2017-07-31 19:08:17
Coco薇(2017年5期)2017-06-05 08:53:16
商周刊(2017年26期)2017-04-25 08:13:04