獵戶座飛船回收系統(tǒng)空投試驗(yàn)與數(shù)據(jù)分析
2023-09-09 06:59:30吳卓張文博林汝領(lǐng)任雅麗王景龍付春慧
航天器工程 2023年4期
關(guān)鍵詞:系統(tǒng)
吳卓 張文博 林汝領(lǐng) 任雅麗 王景龍 付春慧
(北京空間機(jī)電研究所,北京 100094)
隨著我國航天工程的高速發(fā)展,航天器對回收系統(tǒng)的要求越來越高,主要體現(xiàn)在回收的質(zhì)量越來越大,可靠性要求也越來越高。
獵戶座(Orion)飛船是美國開展深空探測的新一代載人飛船[1-2],其回收系統(tǒng)在設(shè)計上繼承了Apollo飛船成熟的群傘方案,同時在研制過程中采用了較為先進(jìn)的試驗(yàn)數(shù)據(jù)分析方法,大幅地減少了空投試驗(yàn)數(shù)量,2017年完成了設(shè)計、試驗(yàn)和鑒定,是美國回收系統(tǒng)先進(jìn)技術(shù)的集中體現(xiàn)。
本文總結(jié)了獵戶座飛船回收系統(tǒng)空投試驗(yàn)的情況,對試驗(yàn)數(shù)據(jù)的分析進(jìn)行了介紹。獵戶座飛船回收系統(tǒng)在試驗(yàn)、數(shù)據(jù)分析和仿真分析等方面均有較為先進(jìn)的研制經(jīng)驗(yàn),有利于全面地掌握回收系統(tǒng)的性能。
1 回收系統(tǒng)的功能和組成
獵戶座飛船回收系統(tǒng)要完成3個主要功能:輔助分離前艙蓋;減速并穩(wěn)定飛船;使飛船達(dá)到穩(wěn)定著陸速度[3]。
獵戶座飛船回收系統(tǒng)的主要設(shè)計要求如下:
(1)減速傘開傘動壓7900Pa,開傘速度Ma 0.7;
(2)最大開傘海拔高度7600m,最小開傘海拔高度約1200m(逃逸模式);
(3)著陸質(zhì)量約9070kg,在海平面的著陸速度不超過10m/s(標(biāo)準(zhǔn)日)。
在設(shè)計上,獵戶座飛船回收系統(tǒng)借鑒了Apollo飛船回收系統(tǒng)的設(shè)計,采用了群傘系統(tǒng),且降落傘間互為熱備份,任何一頂降落傘失效,系統(tǒng)仍能滿足要求。獵戶座飛船回收系統(tǒng)的主要組成和參數(shù)見表1[3]。
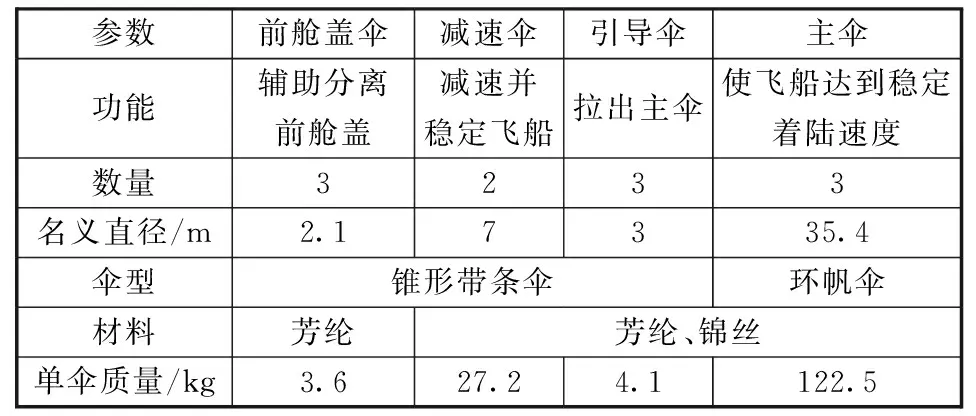
表1 獵戶座飛船回收系統(tǒng)的主要組成和參數(shù)Table 1 Main composition and parameters of Orion spacecraft recovery system
在工作程序的設(shè)計上,獵戶座飛船回收系統(tǒng)兼顧了不同工況,如圖1所示[2]。在正常工況和高空救生工況下,采用前艙蓋傘、減速傘和引導(dǎo)傘分別彈射的方式和引導(dǎo)傘拉出主傘的方式實(shí)現(xiàn)各級傘展開。在低空逃逸情況下,采用前艙蓋傘和引導(dǎo)傘分別彈射的方式和引導(dǎo)傘直接拉出主傘的方式實(shí)現(xiàn)開傘,減速傘不工作。
獵戶座飛船回收系統(tǒng)在方案設(shè)計上充分考慮到了系統(tǒng)的可靠性,沒有采用常規(guī)的減速傘拉出主傘的設(shè)計,而是重新彈射引導(dǎo)傘拉出主傘,避免故障產(chǎn)品對后續(xù)產(chǎn)品的影響,同時兼顧低空逃逸工況。此外,獵戶座飛船回收系統(tǒng)在完成每一項(xiàng)功能時均采用群傘,并保證群傘中任何一頂降落傘失效仍能滿足性能要求,極大程度地提高了系統(tǒng)的可靠性。
2 空投試驗(yàn)概述
為驗(yàn)證回收系統(tǒng)的功能和性能,獵戶座飛船回收系統(tǒng)共進(jìn)行了4個階段的空投試驗(yàn),前3個階段的空投試驗(yàn)為研制性試驗(yàn),第4個階段的空投試驗(yàn)為鑒定性試驗(yàn)。相對于Apollo飛船回收系統(tǒng),獵戶座飛船回收系統(tǒng)的回收質(zhì)量大幅提高,且在每一階段研制完成后不再進(jìn)行鑒定試驗(yàn),而是完成所有研制后進(jìn)行一次鑒定試驗(yàn)。同時,通過引入新的試驗(yàn)測量手段和仿真分析,獵戶座飛船回收系統(tǒng)大幅的減少了空投試驗(yàn)數(shù)量,從Apollo飛船的145次減少到了44次[4-5]。
獵戶座飛船回收系統(tǒng)第1階段空投試驗(yàn)從2007年開始,到2008年結(jié)束,共進(jìn)行了13次,主要驗(yàn)證了單傘的性能,獲得了單傘的充氣參數(shù),并驗(yàn)證了投放系統(tǒng);第2階段空投試驗(yàn)從2009年開始,到2010年結(jié)束,共進(jìn)行了6次,主要考察了故障模式,并對降落傘進(jìn)行了設(shè)計改進(jìn)驗(yàn)證,包括主傘繩長比和結(jié)構(gòu)透氣量的優(yōu)化,提高了主傘的穩(wěn)定性[6];第3階段空投試驗(yàn)從2011年開始,到2016年結(jié)束,共進(jìn)行了17次,主要驗(yàn)證了回收系統(tǒng)在正常模式和故障模式下的性能;第4階段空投試驗(yàn)為鑒定試驗(yàn),從2011年開始,到2016年結(jié)束,共進(jìn)行了8次,主要對全系統(tǒng)進(jìn)行鑒定[7-11]。
在4個階段試驗(yàn)中,第3階段空投試驗(yàn)是核心研制試驗(yàn),驗(yàn)證了不同開傘條件和故障模式下回收系統(tǒng)的性能,試驗(yàn)情況見表2[5]。通過各架次的試驗(yàn)工況可以看出:第3階段空投試驗(yàn)主要驗(yàn)證故障工況下回收系統(tǒng)的運(yùn)動情況和載荷情況,有利于全面地掌握回收系統(tǒng)的性能。這些故障工況的試驗(yàn)數(shù)據(jù)是后續(xù)統(tǒng)計分析的基礎(chǔ),使仿真分析更為可靠,達(dá)到減少空投試驗(yàn)數(shù)量的目的。

表2 獵戶座飛船回收系統(tǒng)第3階段空投試驗(yàn)情況表Table 2 Phase 3 airdrop tests summary of Orion spacecraft recovery system
空投試驗(yàn)CDT-3-1的具體實(shí)施情況如圖2所示[10]。試驗(yàn)在實(shí)施時通過投放平臺拉出試驗(yàn)?zāi)P?隨后模型與投放平臺分離,投放平臺通過2頂主傘回收。模型首先展開2頂程序降落傘,使其達(dá)到試驗(yàn)需要的高度和速度,之后彈射出2頂減速傘或前艙蓋傘,進(jìn)入到回收系統(tǒng)工作階段。
3 空投試驗(yàn)數(shù)據(jù)分析
在空投試驗(yàn)數(shù)據(jù)分析方面,獵戶座飛船回收系統(tǒng)結(jié)合仿真對充氣參數(shù)開展了統(tǒng)計分析,獲得了降落傘的阻力特性包絡(luò),并采用圖像測量和分析,得到了群傘的運(yùn)動規(guī)律,進(jìn)一步掌握了群傘系統(tǒng)的減速性能。
3.1 充氣參數(shù)的統(tǒng)計分析
降落傘阻力特性的仿真精度取決于對其充氣過程阻力面積變化的模擬,充氣參數(shù)是模擬降落傘充氣過程的關(guān)鍵參數(shù)。為獲得較為準(zhǔn)確的充氣參數(shù),需要對試驗(yàn)進(jìn)行重構(gòu),即利用仿真模型對試驗(yàn)過程進(jìn)行重新模擬,使仿真結(jié)果與試驗(yàn)數(shù)據(jù)的誤差最小。試驗(yàn)重構(gòu)可以獲取到與試驗(yàn)數(shù)據(jù)最吻合的降落傘充氣參數(shù)。
獵戶座飛船的試驗(yàn)重構(gòu)采用參數(shù)優(yōu)化的方法,將充氣參數(shù)做為優(yōu)化參數(shù),優(yōu)化目標(biāo)為最小化仿真的阻力面積變化曲線與試驗(yàn)數(shù)據(jù)曲線之間的偏差面積。主傘一級收口階段阻力面積變化的重構(gòu)如圖3所示[12]。優(yōu)化后得到的最優(yōu)參數(shù)即為此次空投試驗(yàn)的重構(gòu)充氣參數(shù)。
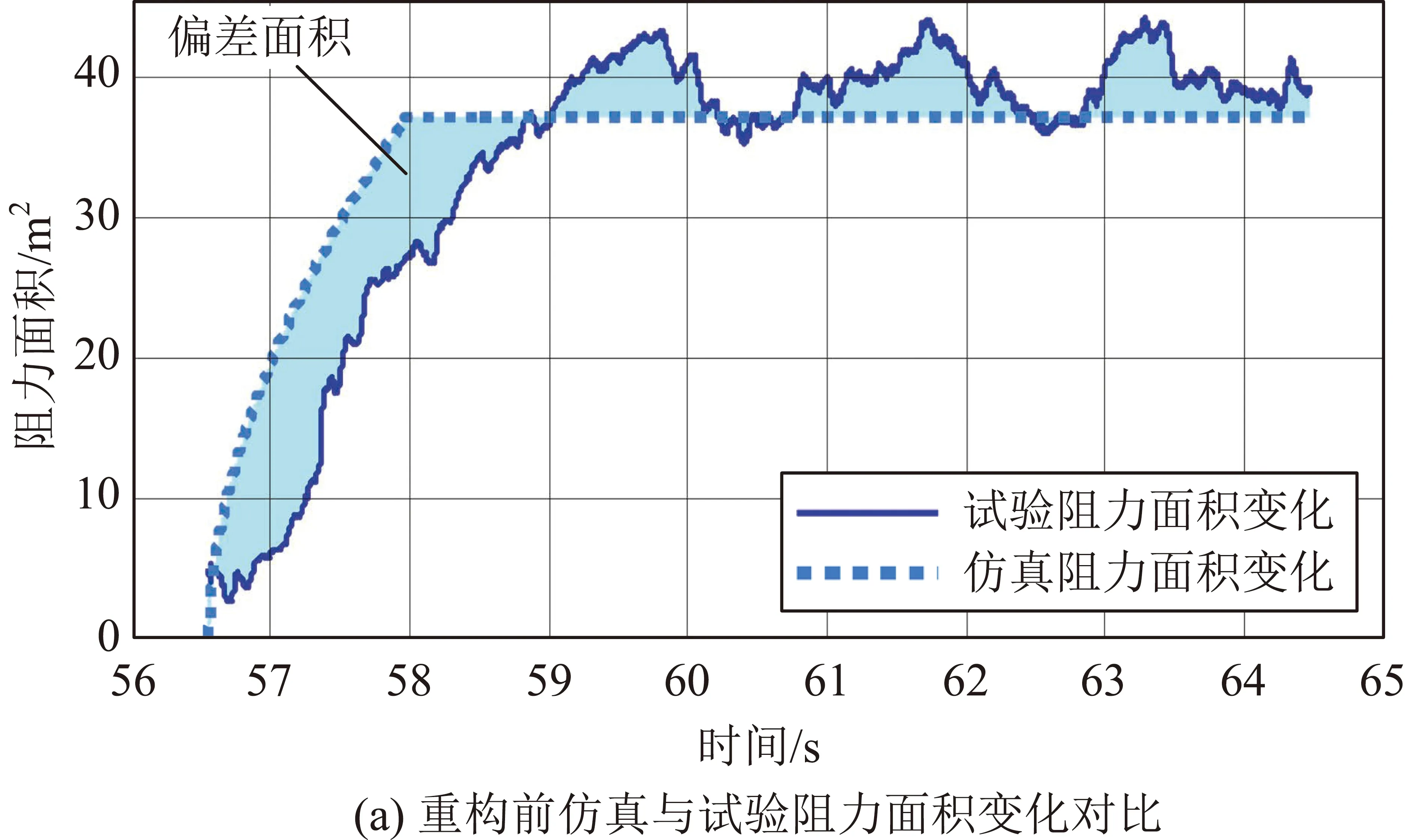
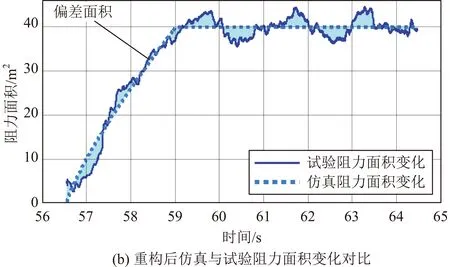
圖3 主傘一級收口階段阻力面積變化的重構(gòu)Fig.3 Reconstruction of main parachute drag area growth curve at first reefing stage
在大量試驗(yàn)數(shù)據(jù)的基礎(chǔ)上,通過重構(gòu),可以得到許多降落傘重構(gòu)充氣參數(shù),對這些參數(shù)進(jìn)行統(tǒng)計分析,得到充氣參數(shù)的分布規(guī)律和試驗(yàn)數(shù)據(jù)包絡(luò)。在試驗(yàn)數(shù)據(jù)包絡(luò)基礎(chǔ)上,增加一個系數(shù),作為充氣參數(shù)的選取包絡(luò)。在選取包絡(luò)內(nèi)按照分布規(guī)律隨機(jī)選取充氣參數(shù)對系統(tǒng)的運(yùn)動過程進(jìn)行仿真,防止因選取包絡(luò)外充氣參數(shù)導(dǎo)致的不合理數(shù)據(jù),從而最終得到降落傘阻力特性的包絡(luò)[13]。這種分析方法保證了仿真結(jié)果的可靠性,有利于減少空投試驗(yàn)數(shù)量。
按照上述方法,對獵戶座飛船的前艙蓋傘、減速傘和主傘的充氣參數(shù)進(jìn)行了統(tǒng)計分析,分析結(jié)果表明:重構(gòu)充氣參數(shù)的分布均符合正態(tài)分布或?qū)?shù)正態(tài)分布,同時根據(jù)仿真模型,可以進(jìn)一步得到降落傘的充氣過程阻力面積變化包絡(luò),為降落傘的強(qiáng)度校核以及其它工況試驗(yàn)中載荷的預(yù)測提供依據(jù)。其中,主傘的重構(gòu)充氣參數(shù)(傘衣充氣距離常數(shù)和輪廓形狀指數(shù))符合對數(shù)正態(tài)分布,按照這一分布隨機(jī)選取參數(shù),進(jìn)行了20萬次的仿真分析,將仿真中2個充氣參數(shù)和其組合的頻次作為3個維度建立了參數(shù)組合包絡(luò)和分布的柱狀圖,如圖4所示[14]。圖4中淺藍(lán)色點(diǎn)為2頂主傘試驗(yàn)數(shù)據(jù),深藍(lán)色點(diǎn)為3頂主傘試驗(yàn)數(shù)據(jù),紅色線條為統(tǒng)計分析邊界,藍(lán)色線條為試驗(yàn)數(shù)據(jù)包絡(luò),黑色線條為選取包絡(luò),20萬次仿真得到了主傘一級收口階段阻力面積變化曲線的包絡(luò),如圖5所示[14]。根據(jù)一級收口階段的阻力面積變化包絡(luò),可以計算出主傘一級收口階段的開傘載荷包絡(luò),為主傘的一級收口階段的強(qiáng)度校核提供依據(jù)。
圖4 主傘充氣參數(shù)選取包絡(luò)和分布Fig.4 Distributions boundary of inflation parameters of main parachute
3.2 群傘運(yùn)動和載荷的圖像分析
獵戶座飛船回收系統(tǒng)空投試驗(yàn)中采用了直升機(jī)伴飛攝像和艙載攝像來獲取圖像數(shù)據(jù),并創(chuàng)新地將這些圖像作為數(shù)據(jù)進(jìn)行深入分析,與試驗(yàn)的測量數(shù)據(jù)相互印證,得到降落傘的真實(shí)運(yùn)動情況和局部載荷情況,為精細(xì)化仿真模型和降落傘的設(shè)計改進(jìn)提供依據(jù)。
降落傘與飛船之間的相對位置通過外偏角來確定,降落傘與飛船的鐘擺運(yùn)動情況通過擺動角來確定,外偏角為單傘與外偏軸的成角,擺動角為外偏軸與豎直方向的成角,外偏軸為多個單傘載荷向量的合成向量方向,如圖6所示[15]。由試驗(yàn)的過載數(shù)據(jù)算出的群傘總阻力面積要小于由單傘載荷數(shù)據(jù)算出的單傘阻力面積的總和。考慮外偏角后,群傘總阻力面積為單傘阻力面積與其外偏角的余弦乘積之和,這使得過載數(shù)據(jù)和載荷數(shù)據(jù)吻合較好。
外偏角的大小與傘衣的載荷成反比,即降落傘數(shù)目越少,飛船越重,則外偏角越小[16]。通過對試驗(yàn)中外偏角的統(tǒng)計分析,可以建立單傘外偏角的變化模型,可用于對群傘阻力面積進(jìn)行較為準(zhǔn)確的模擬。
除了單傘擺動外,群傘系統(tǒng)與飛船在穩(wěn)降過程中還會出現(xiàn)鐘擺運(yùn)動,其對群傘的阻力面積和飛船的姿態(tài)有很大影響,進(jìn)而對系統(tǒng)的下降速度產(chǎn)生影響,如圖7所示[17]。圖7中,黃色方框部分即為兩頂主傘發(fā)生鐘擺運(yùn)動時的速度變化曲線。通過曲線可以看出:鐘擺運(yùn)動中系統(tǒng)的下降速度變化較大,最大的下降速度已超過了技術(shù)要求。多次試驗(yàn)還發(fā)現(xiàn),兩傘組成的群傘系統(tǒng)有概率會發(fā)生鐘擺運(yùn)動。三傘組成的群傘系統(tǒng)出現(xiàn)鐘擺運(yùn)動的概率較小,只會在3頂傘處于同一條直線上時發(fā)生[17]。早期空投試驗(yàn)中群傘的鐘擺運(yùn)動情況見表3[17]。
外偏角和擺動角對群傘系統(tǒng)的阻力面積影響較大,進(jìn)而影響系統(tǒng)的下降速度。為提高穩(wěn)定性,對獵戶座飛船回收系統(tǒng)故障情況下兩傘的鐘擺運(yùn)動開展了理論分析和仿真建模,經(jīng)分析認(rèn)為:在渦環(huán)中降落傘的氣動不穩(wěn)定性是鐘擺運(yùn)動的根本原因,并通過縮比主傘的風(fēng)洞試驗(yàn)和縮比空投試驗(yàn)以及3次全尺寸試驗(yàn)(CDT-3-15、16、17)驗(yàn)證了永久性收口繩、過充控制繩和縮短吊帶3項(xiàng)改進(jìn)設(shè)計。受時間和經(jīng)費(fèi)的限制,有限的試驗(yàn)數(shù)據(jù)不能證明改進(jìn)有效,且這些改進(jìn)均會在一定程度上減小群傘的阻力面積,影響正常情況下(3頂主傘)回收系統(tǒng)的性能,因此這些改進(jìn)最終均未采用[18]。
此外,結(jié)合直升機(jī)伴飛攝像和艙載攝像,可以建立降落傘的三維模型,如圖8所示[19-20]。傘衣的三維模型可以用來準(zhǔn)確計算降落傘的體積和附加質(zhì)量的變化,提高仿真分析的可信度[21],并能結(jié)合載荷和氣動數(shù)據(jù)分析傘衣上的應(yīng)力分布,為降落傘設(shè)計改進(jìn)提供依據(jù)。
圖8 充氣過程三維傘衣模型Fig.8 3-D canopy models at inflation stages
大多數(shù)獵戶座飛船回收系統(tǒng)的空投試驗(yàn)至少采用一架直升機(jī)進(jìn)行伴飛拍攝,有的空投試驗(yàn)利用多架直升機(jī)在不同高度進(jìn)行拍攝,捕捉關(guān)鍵動作時刻。其中,收口展開過程的圖像可以用來分析收口繩上的載荷[22]。
3.3 數(shù)據(jù)分析的關(guān)鍵技術(shù)分析
獵戶座飛船回收系統(tǒng)空投試驗(yàn)的數(shù)據(jù)分析和應(yīng)用可以使試驗(yàn)與仿真緊密的結(jié)合在一起,一方面通過試驗(yàn)數(shù)據(jù)提高了仿真精度;另一方面仿真為規(guī)劃試驗(yàn)工況提供依據(jù),縮減了試驗(yàn)次數(shù),其關(guān)鍵技術(shù)有以下幾點(diǎn)。
1)合理的充氣參數(shù)
為適應(yīng)不同的降落傘,降落傘充氣模型需要按照單位面積載荷大小建立無限質(zhì)量模型和有限質(zhì)量模型,通過充氣參數(shù)驅(qū)動來建立降落傘阻力面積變化曲線,不同模型的充氣參數(shù)不同。同時,為了能夠?qū)崿F(xiàn)對大量試驗(yàn)數(shù)據(jù)的重構(gòu),需要充氣參數(shù)的分布符合統(tǒng)計規(guī)律,且每個模型內(nèi)的多個充氣參數(shù)是相對獨(dú)立的。否則,在進(jìn)行仿真分析時會出現(xiàn)不合理情況。因此,設(shè)計合理的充氣參數(shù)是充氣參數(shù)統(tǒng)計分析的基礎(chǔ)。
獵戶座飛船的降落傘充氣模型中選取傘衣充氣常數(shù)、輪廓形狀指數(shù)、過充系數(shù)等作為充氣參數(shù)。降落傘充氣過程的模型較多,其它模型和充氣參數(shù)是否更適合進(jìn)行統(tǒng)計分析有待進(jìn)一步研究。
2)試驗(yàn)的重構(gòu)方法
在對試驗(yàn)進(jìn)行重構(gòu)時,重構(gòu)后的數(shù)據(jù)不可能與試驗(yàn)數(shù)據(jù)完全一致,需要建立重構(gòu)目標(biāo),以確定試驗(yàn)相應(yīng)的充氣參數(shù)。此外,為了適應(yīng)大量的試驗(yàn)數(shù)據(jù),需要建立批量重構(gòu)的方法。
獵戶座飛船的試驗(yàn)重構(gòu)采用優(yōu)化的模式,將充氣參數(shù)做為優(yōu)化參數(shù),優(yōu)化目標(biāo)為最小化仿真的阻力面積變化曲線與試驗(yàn)數(shù)據(jù)曲線之間的偏差面積。優(yōu)化后得到的最優(yōu)參數(shù)即為空投試驗(yàn)的重構(gòu)參數(shù)。
3)伴飛圖像的獲取
回收系統(tǒng)空投試驗(yàn)圖像數(shù)據(jù)分析的關(guān)鍵技術(shù)在空投試驗(yàn)中伴飛圖像的獲取。一般情況下,伴飛圖像需要采用直升機(jī)在預(yù)定高度拍攝,拍攝位置應(yīng)盡量與降落傘處于同一水平面,拍攝的降落傘動作應(yīng)為所需動作,如開傘、收口展開和穩(wěn)定過程等。同時,直升機(jī)應(yīng)與空投模型保持一定的安全距離。為獲取更為準(zhǔn)確的圖像資料,同一高度有時需要采用2架直升機(jī)從不同方位拍攝。此外,伴飛拍攝、艙上拍攝和試驗(yàn)測量數(shù)據(jù)要做到統(tǒng)一授時,以便分析時進(jìn)行同一時刻的比對。
4 啟示與建議
作為美國下一代載人飛船,獵戶座飛船采用了先進(jìn)的回收系統(tǒng),其在系統(tǒng)方案的設(shè)計、試驗(yàn)的規(guī)劃、仿真分析等方面均有值得參考的經(jīng)驗(yàn)。本文通過對獵戶座飛船回收系統(tǒng)空投試驗(yàn)和數(shù)據(jù)分析方法的分析,對航天器回收系統(tǒng)的研制,特別是群傘系統(tǒng),提出以下幾點(diǎn)啟示和建議。
(1)群傘系統(tǒng)的空投試驗(yàn)驗(yàn)證應(yīng)從單傘到群傘,群傘的空投試驗(yàn)建議以故障工況為主,有利于全面地掌握群傘系統(tǒng)的性能。
(2)回收系統(tǒng)的數(shù)據(jù)分析應(yīng)與仿真分析相結(jié)合,通過仿真重構(gòu)試驗(yàn)數(shù)據(jù),獲取相對真實(shí)的降落傘充氣參數(shù),并建議引入統(tǒng)計方法,建立充氣參數(shù)包絡(luò),從而獲得降落傘的阻力特性包絡(luò),保證仿真分析的可靠性,縮減空投試驗(yàn)次數(shù)。
(3)回收系統(tǒng)的空投試驗(yàn)建議引入圖像分析,通過圖像,可以分析降落傘的運(yùn)動情況,有助于獲得更準(zhǔn)確的降落傘性能,還可以分析降落傘的形狀變化,獲取傘衣上的應(yīng)力分布,為降落傘設(shè)計改進(jìn)提供依據(jù)。
猜你喜歡
工業(yè)設(shè)計(2022年8期)2022-09-09 07:43:20
軍民兩用技術(shù)與產(chǎn)品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
裝備制造技術(shù)(2019年12期)2019-12-25 03:06:46
制造技術(shù)與機(jī)床(2019年10期)2019-10-26 02:47:06
中國洗滌用品工業(yè)(2019年4期)2019-05-11 09:27:34
鐵道通信信號(2018年5期)2018-06-28 03:06:24
家庭影院技術(shù)(2017年9期)2017-09-26 03:41:45
知識經(jīng)濟(jì)·中國直銷(2017年5期)2017-06-15 20:28:19
通信電源技術(shù)(2016年6期)2016-04-20 06:21:32