航天器測控與通信分系統自主健康管理方法
2023-09-09 06:37:54龍吟黎峰一黃才孫斌張克楠丁凱劉寧波
航天器工程 2023年4期
龍吟 黎峰一 黃才 孫斌 張克楠 丁凱 劉寧波
(1 北京空間飛行器總體設計部,北京 100094)(2 航天恒星科技有限公司,北京 100095)
測控與通信分系統作為航天器的關鍵平臺分系統,負責配合地面測控通信系統完成航天器的跟蹤測軌和數據傳輸任務,航天器的遙控指令及數據注入接收任務,以及遙測數據的采集、處理及傳輸任務。對于載人航天器,還負責圖像、話音的采集處理任務和配合目標飛行器完成交會對接相對測量及通信任務。針對航天器在軌長期自主飛行的需求,測控與通信分系統有必要實現自主健康管理,保證飛行任務的順利執行。
測控與通信分系統的自主健康管理方法包含物理層、數據鏈路層和應用層3個層面。物理層用于提升分系統的空間環境適應能力;數據鏈路層實現測控鏈路的自主維護功能;應用層實現較為復雜的自主健康管理任務以適應各種特殊工況。文獻[1-3]中提出了一種面向航天的高可靠FPGA設計架構,通過采用三模冗余和回讀刷新的設計提升靜態隨機存取存儲器(SRAM)FPGA在軌工作的可靠性。文獻[4-6]中提出了基于“看門狗”的設計方法,支持在軌單粒子翻轉導致程序異常的自主檢測及恢復。上述方法僅從物理層面開展自主健康管理設計,提升分系統的空間環境適應性,缺乏數據鏈路層和應用層的設計,自主健康管理功能具有一定的局限性。文獻[7]中提出一種基于中央終端裝置(CTU)的專項健康管理和基于數據處理單元(DPU)的自主健康管理系統,分別通過雙遠置終端單元(DRTU)硬通道和遠程終端(RT)軟通道采集和存儲用戶的遙測參數,并進行分析和處理,實現自主健康管理。文獻[8]中提出一種以數管分系統的系統管理單元(SMU)為核心的自主健康管理系統,分別通過硬通道和軟通道實現用戶遙測參數的采集、存儲、分析和處理,最終實現自主健康管理。文獻[9]中提出了一種基于包應用標準和航天器接口業務標準的自主健康管理方法,設計了分層的通用軟件架構,該方法依賴于衛星管理單元(SMU)和衛星數據接口單元(SDIU),采用專用設備進行集中式管理。上述方法均采用集中式自主健康管理的方法,基本實現了重大安全事件的自主處置,具有通用化、拓展性強的優點,但是對系統架構提出較高要求。①負責自主健康管理的設備是系統的核心和單點,方法對核心設備的計算、存儲資源和設備自身可靠性的要求較高,至少需要進行健康管理設備本身及對外接口的雙備份或三備份的設計,增加設備本身及系統的復雜度,降低系統可靠性。②方法要求所有被監視的設備具備1553B總線接口并且遵循健康維護協議,對分系統設備及整器總線資源要求較高,不適用于所有航天器。③方法缺少分層設計,自主健康管理覆蓋范圍有所局限。文獻[10]中提出一種在軌自主健康管理系統的分層體系結構,分別從基礎服務層和自主健康管理服務層設計,完成自主健康管理的任務。該方法提出分層設計的思想,但是需要為每個分系統配置一個控制器,實現分系統狀態監控,并且需要為整個航天器配置一個核心處理單元(CPU),負責與各個分系統控制器進行交互,增加系統復雜度并降低可靠性。綜上,已有的測控與通信分系統的自主健康管理方法,從物理層、通用化、可擴展性層面開展設計并取得了成果,主要適用于資源配置相對較高的航天器及其典型工況。針對通用航天器及其特殊工況,上述方法存在以下不足。①缺乏分層設計,側重于物理層的自主健康管理,缺乏數據鏈路層及應用層的設計,自主健康管理范圍較少,功能有所局限,缺少鏈路自主維護,掉電恢復、交會對接和出艙通信等特殊工況的適應能力。②采用集中式1553B總線式設計,雖然具備通用和易擴展的優點,但是也帶來系統設計復雜和不具備普適性的缺點。
基于此,本文提出一種分布式的航天器測控與通信分系統自主健康管理方法,分別從物理層、數據鏈路層和應用層進行設計,實現自主健康管理。
1 需求分析
根據航天器長期在軌飛行的各種任務場景和特殊工況,總結出通用航天器的測控與通信分系統要具備以下自主健康管理功能。①正常測控弧段內,測控與通信分系統和地基測控站及中繼衛星全程穩定建立鏈路,分系統的射頻接收機如果出現長時間未同步地面上行信號,要具備自主重新建鏈的功能。②測控與通信分系統要全程通過全球導航衛星系統完成實時正確的位置及速度解算,如果分系統的導航接收機長時間未完成定位解算時,要具備自動重啟定位解算的功能。③分系統要適應整器臨時掉電的異常工況,支持整器掉電恢復后通信鏈路的自主恢復。另外,針對載人航天器,還要增加以下2項功能,即:①支持交會對接過程中星間鏈路發射功率隨相對距離的自適應切換,這樣既節省功耗,又提升鏈路可靠性;②支持出艙通信過程中的通信鏈路的發射功率自適應調整,這樣既節省功耗,又消除遠近效應的影響。
針對以上分析,自主健康管理方法應具備以下性能。①采用分布式設計,分系統各類關鍵單機均具備自主健康管理功能,彼此之間的健康管理沒有耦合,無專用自主健康管理設備,無系統單點,提升系統可靠性。②具備較強的空間環境適應性,消除單粒子翻轉對分系統功能的影響。③采用分層式設計,分別從物理層、數據鏈路層和應用層開展設計,從不同層面提升分系統的自主健康管理功能,增強系統可靠性。
2 自主健康管理方法
本文提出一種基于分層結構的分布式航天器測控與通信分系統自主健康管理方法(見圖1),分別從物理層、數據鏈路層和應用層進行設計,實現自主健康管理。
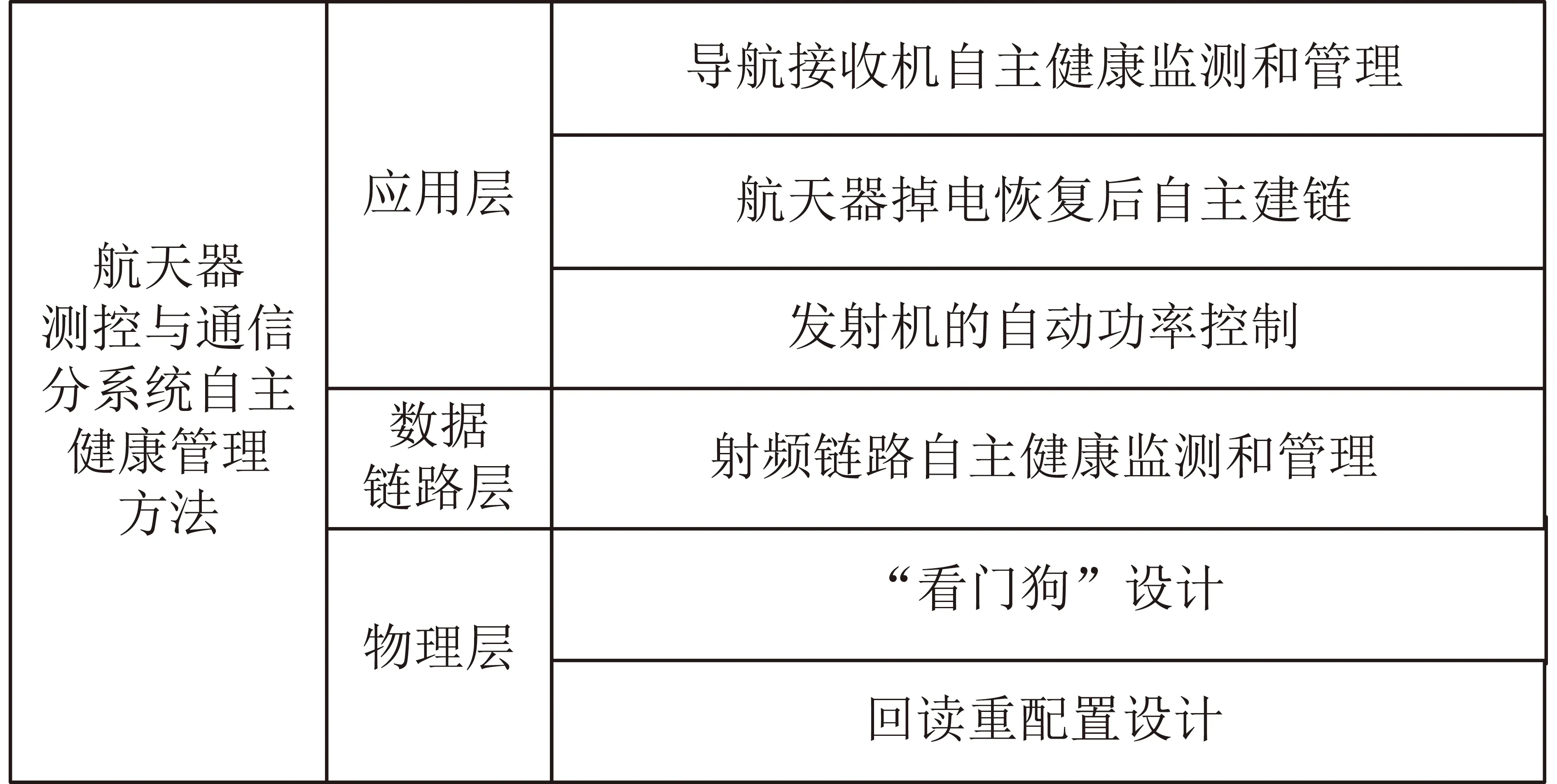
圖1 自主健康管理方法分層設計Fig.1 Layered design of autonomous health management method
物理層分別從“看門狗”和回讀重配置2個方面開展設計,使具備軟件配置項的設備提升抵抗單粒子翻轉的性能,提升分系統的空間環境適應性。數據鏈路層實現基于射頻鏈路的自主監測設計,負責正常測控弧段內的射頻鏈路的實時監測,并針對單粒子翻轉導致的鏈路失鎖進行實時處置,支持數據鏈路層的射頻鏈路自主維護,通過實時監視和維護射頻鏈路狀態,具備解決特殊工況下回讀刷新等物理層設計無法維護射頻鏈路的問題,進一步提升了自主健康管理的覆蓋范圍和系統可靠性。應用層分別完成導航接收機自主健康監測、航天器掉電恢復后自主建鏈、不同任務場景下發射機自動功率控制的設計,分別實現導航接收機的定位解算功能實時監視和重啟,航天器異常掉電恢復后的射頻鏈路快速恢復,交會對接過程中射頻鏈路發射功率根據相對距離的自適應調整,以及出艙通信過程中為消除遠近效應的出艙服發射功率自適應調整。相對之前的方法,本文方法能提升多任務場景的自主健康維護能力,以及整器異常掉電再恢復的特殊工況的適應能力,進一步提升自主健康管理的覆蓋范圍和可靠性。本文方法采用分布式設計,所有的自主健康管理均在分系統內部完成,對分系統設備沒有1553B總線接口及通信協議的要求,設備之間沒有耦合性,能簡化系統設計和提升系統可靠性。
2.1 物理層設計
物理層設計采用已有的設計方法,即三模冗余、“看門狗”和回讀重配置。
針對SRAM型FPGA存在加載程序偶發失敗風險的問題,通過“看門狗”設計保證SRAM型FPGA上電加載的可靠性。SRAM型FPGA加電配置成功后開始運行程序,從輸入/輸出接口引出一個周期信號,利用外部硬件“看門狗”來實現FPGA的配置監控。當FPGA配置失敗時,由于程序沒有運行,“看門狗”芯片沒有及時獲得“喂狗”信號,周期性地發出重配置信號提供給FPGA,直到FPGA配置成功。
針對SRAM型FPGA抗輻照性能較差,在空間環境中容易發生單粒子翻轉事件特性。通過在設備內部增加一塊反熔絲型FPGA實現對SRAM型FPGA的回讀重配置。對SRAM型FPGA進行回讀比對,即讀取可編程只讀存儲器(PROM)中的配置數據,同時向SRAM型FPGA發送回讀指令讀取回讀數據,將這兩部分數據進行一一比對,如果比對出錯,則重加載SRAM型FPGA。
圖2為回讀重配置流程。
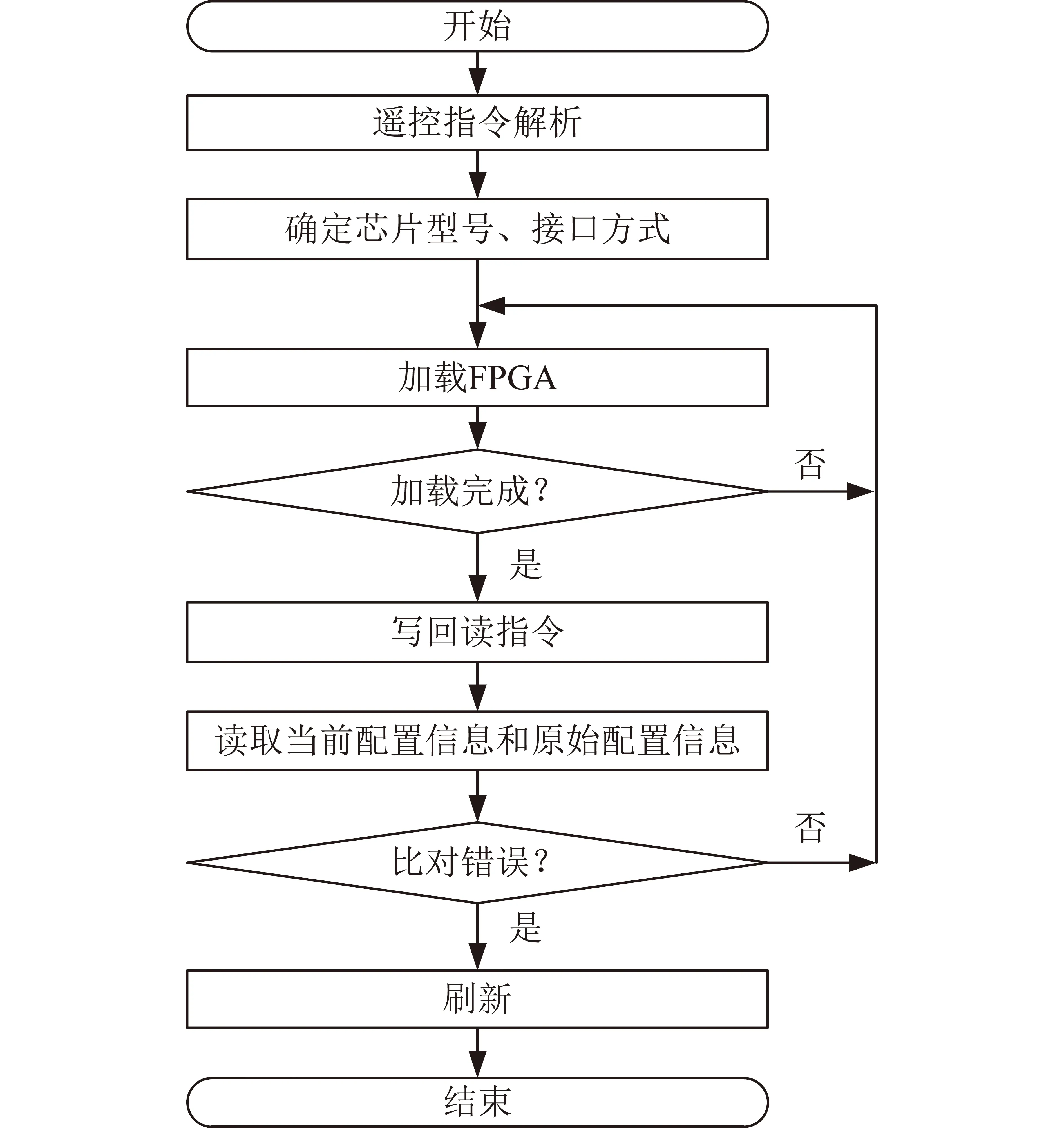
圖2 回讀重配置流程Fig.2 Flow of read back reconfiguration
2.2 數據鏈路層設計
為提升鏈路的可靠性,測控與通信分系統的射頻接收機通常具備卷積、里德-所羅門(RS)、低密度奇偶校驗碼(LDPC)等譯碼功能,這些功能大多采用基于FPGA的知識產權核(IPC)設計實現,并且部分IPC占用了FPGA的塊隨機存儲器(Block RAM)資源。雖然SRAM型FPGA配置了反熔絲FPGA實現程序加載和配置區動態刷新,從一定程度上避免了單粒子翻轉對設備的影響。Block RAM模塊在SRAM型FPGA中運行時實際使用了配置存儲區的RAM位,當對配置存儲區的RAM位重配置時,會干擾這些模塊的正常工作,所以配置區動態刷新處理回避了Block RAM模塊占用的資源。配置區動態刷新只對SRAM型FPGA的查找表(非隨機存取存儲器(RAM)占用)及布線資源對應的配置數據進行處理。另外,由于FPGA的資源有限和降額設計要求,只能對FPGA部分關鍵參數的Block RAM資源進行三模冗余設計,無法對占據資源較多的IPC進行三模冗余設計。即使采用大容量資源的FPGA對IPC進行三模冗余,單粒子翻轉累加效應仍然有概率導致IPC功能失效,無法從根本上消除單粒子翻轉的影響。目前已有的針對射頻鏈路的自主健康管理方法,是從三模冗余、“看門狗”設計和回讀重配置的物理層開展設計,沒有考慮占用Block RAM資源的IPC被單粒子打翻的風險及應對措施,因此,射頻接收機存在由于FPGA內部的IPC被單粒子翻轉導致的設備異常工作的風險。
為了消除上述風險,本文設計一種基于射頻鏈路自主健康監測和管理的方法,在數據鏈路層上實時監視射頻鏈路同步情況和處置導致鏈路異常的突發事件。通過在實現復雜射頻鏈路通信功能的SRAM型FPGA和反熔絲型的FPGA的外圍配置單片機,并通過外圍單片機間隔1h對射頻接收機的鎖定狀態(包括載波鎖定標志、遙控偽碼鎖定標志、位同步狀態標志及卷積編碼同步狀態標志,正常同步狀態為1,失步為0)進行持續1min監測,1min內采集120次(500ms采集1次),出現不小于90次4個遙測狀態不全為1,單片機給配置及動態刷新FPGA發送“基帶邏輯配置FPGA復位指令”實現對調制解調FPGA的全局配置(即程序重載),見圖3。如果在軌單粒子翻轉造成前向信號處理模塊異常,并進一步導致鏈路失鎖時,實現產品可自行恢復正常的功能,提升產品的在軌抗單粒子能力。

圖3 射頻鏈路自主健康管理流程Fig.3 Flow of autonomous health management for RF link
2.3 應用層設計
2.3.1 導航接收機自主健康監測和管理
導航接收機作為關鍵單機,負責實現航天器的跟蹤、測軌、絕對定位和相對定位,為保證導航接收機的長期在軌健康工作,需要對其工作狀態進行實時監視,并對異常工作狀態進行識別和自主處置。因此,除了依靠物理層的軟件“看門狗”設計和數據鏈路層的射頻鏈路自主健康監測設計,還需要對應用層的關鍵功能及性能指標進行識別和處置。
導航接收機組成及信息流見圖4,包含2個數字信號處理(DSP)軟件配置項(導航信息處理軟件和接口軟件),以及3個FPGA軟件配置項(導航信息處理相關器FPGA軟件、導航信息處理控制器FPGA軟件和接口FPGA軟件)。導航信息處理軟件的主要功能是接收射頻前端提供的中頻信號,完成GPS L1和北斗B1頻點的信號解調/解擴處理,獲得導航電文和原始觀測數據,解算出航天器的絕對位置、速度、時間,并將絕對定位結果發送到接口板中。接口軟件的主要功能是負責與接口FPGA通信交互。導航信息處理板相關器FPGA軟件主要完成北斗、GPS導航信號的數字下變頻、去偽碼和相關累加功能,同時完成航天器快速捕獲功能。導航信息處理控制器FPGA軟件主要完成導航信息處理板相關器FPGA程序的加載、回讀、更新,以及時鐘頻率合成和時間同步的功能。接口FPGA軟件主要完成與對外各用戶的接口通信,以及對內與導航信息處理板通信和片上其他邏輯等工作。導航接收機自主健康管理流程見圖5。
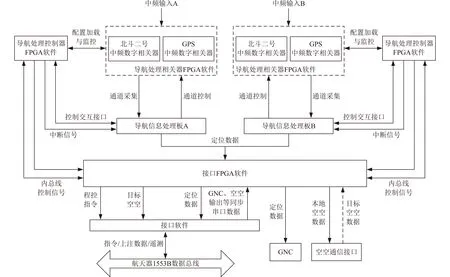
注:GNC為制導、導航與控制。圖4 導航接收機組成及信息流Fig.4 Navigation receiver composition and information
圖5 導航接收機自主健康管理流程Fig.5 Flow of autonomous health management for navigation receiver
針對中低軌航天器,全球導航星座的覆蓋率為100%,導航接收機理論上可以完成全程定位解算。目前,已有的自主健康管理方法缺少對導航接收機的自主健康管理設計的相關內容。基于此,本文設計導航接收機的非定位時間作為應用層的關鍵指標判據,監視及處置措施如下。①如果持續10min不定位,則復位FPGA,重配所有硬件設備(包含相關器FPGA),重新設置通道,清空所有星歷,重置本地時鐘(時間間隔計數器(TIC)不歸零);②若持續20min不定位(復位FPGA后持續10min不定位),則進行DSP軟件系統初始化,重配所有硬件設備(包含相關器FPGA),重新設置通道,重新初始化系統變量(包含清空所有星歷,重置本地時鐘(TIC不歸零)等;③連續非定位時間超過30min,進行DSP軟件復位,導航信息處理軟件完成程序重新加載,TIC歸零。
2.3.2 航天器掉電恢復后自主建鏈方法
在航天器正常在軌飛行過程中,其天地通信鏈路包括統一S頻段(USB)應答機鏈路、S頻段數傳鏈路2種直接對地鏈路,以及窄波束中繼鏈路、寬波束中繼鏈路2種天基鏈路。其中,USB應答機鏈路通過USB應答機、USB天線網絡和安裝在航天器一象限和三象限的S頻段接收及發送天線與地面建立雙向通信鏈路。S頻段數傳鏈路通過S頻段數傳機、數傳天線網絡和安裝在航天器一象限和三象限的數傳天線與地面建立返向通信鏈路。寬波束中繼鏈路通過寬波束中繼S終端、射頻收發組件和分布在航天器一象限和三象限的寬波束S頻段接收及發射天線完成與中繼衛星建立雙向通信鏈路。目前已有的航天器自主健康管理方法缺少對航天器異常掉電再恢復的特殊工況設計,存在該工況下航天器無法自主恢復鏈路的風險。為保證航天器一次母線掉電恢復后測控鏈路的正常恢復,本文采用以下設計方法,過程見圖6。
圖6 航天器掉電恢復后自主建鏈過程Fig.6 Process of autonomous chain building after spacecraft power outage recovery
(1)USB應答機、S頻段數傳機、寬波束中繼S終端、射頻收發組件的一次電源,采用直接掛在一次母線或通過繼電器掛在一次母線,并且上述設備入軌后保持長期開機狀態。在航天器異常掉電恢復后,上述設備能夠立即恢復開機工作狀態。
(2)USB天線網絡、數傳天線網絡均設計為一象限和三象限同時接通的狀態,或者通過繼電器設置為一象限和三象限同時接通的狀態。在航天器異常掉電恢復后,天線網絡能保證一象限和三象限天線立即同時接通。
(3)S頻段接收及發射天線、數傳天線、寬波束S頻段接收及發射天線,均設計為準全向天線,保證在一象限和三象限天線接通時刻無論航天器處于何種姿態均可以和地面或中繼衛星快速建立鏈路。
窄波束中繼鏈路不同于前面3種低帶寬的寬波束鏈路,是一種基于Ka頻段和S頻段的依靠伺服中繼天線或者相控陣天線對中繼衛星精確跟蹤的高帶寬窄波束鏈路。窄波束中繼鏈路的正常建立,依賴于航天器和中繼衛星之間的精確指向,而航天器對中繼衛星的精確指向依賴于航天器的自身位置及姿態信息、中繼衛星的位置信息和伺服跟蹤算法。在航天器跟蹤過程中發生異常掉電恢復事件,航天器失去對中繼衛星的精確指向,導致窄波束中繼鏈路失鎖。為了讓窄波束中繼鏈路適應航天器異常掉電后恢復的特殊工況,本文采用以下設計方法。
(1)窄波束中繼終端通過導航接收機提供的航天器位置信息和GNC分系統提供的航天器姿態信息,確認航天器自身的伺服中繼天線或者相控陣天線的原始指向;通過地面上注的中繼衛星軌道六根數確定中繼衛星的位置信息;根據伺服中繼天線或者相控陣天線和中繼衛星之間的相對位置關系,窄波束中繼終端驅動伺服中繼天線或者相控陣天線精確指向中繼衛星,建立窄波束中繼前向、返向鏈路。
(2)航天器異常掉電恢復后,窄波束中繼終端首先獲取導航接收機提供的位置信息和GNC分系統提供的姿態信息,確定伺服中繼天線或者相控陣天線的初始位置。
(3)窄波束中繼終端依據導航接收機提供的位置信息,以及參與飛行任務中繼衛星的先驗定點位置信息,確定航天器當前窄波束跟蹤弧段所在的中繼衛星。
(4)窄波束中繼終端根據自身位置信息和姿態信息,以及所確定的中繼衛星的先驗位置信息,對中繼衛星進行跟蹤嘗試。由于中繼衛星的位置信息非實時測量,為先驗信息,精度不足,可能無法導引伺服中繼天線或者相控陣天線精確指向中繼衛星。但是,伺服中繼天線兼容Ka頻段和S頻段,S頻段波束相對較寬,容易捕獲跟蹤,待窄波束S鏈路建立后,通過該鏈路上注中繼衛星的精確實測軌道六根數可以進一步實現窄波束Ka鏈路的恢復。另外,支持自跟蹤的窄波束中繼終端有較大概率通過先驗信息捕獲到中繼衛星發射的信標信號,然后進一步根據信標信號的功率強度進行自跟蹤,最終建立窄波束中繼Ka前向、返向鏈路。
2.3.3 發射機自動功率控制方法
測控與通信分系統在交會對接的任務場景下,存在與目標飛行器交互通信的需求;在出艙通信的任務場景中,存在與進行出艙活動的航天員通信的需求。交會對接和出艙通信任務場景均涉及到航天器與目標飛行器或者出艙活動航天員的相對位置變化,通信雙方的發射功率需要隨著相對距離的變化而自適應調整,從而提高交會對接過程中通信鏈路的可靠性和安全性[11],以及降低出艙通信過程中多名航天員相對航天器出艙通信的遠近效應[12]。目前已有的方法缺少關于發射機的自動功率控制設計,為此,本文提出一種發射機自動功率控制方法,滿足含有交會對接和出艙通信任務應用場景的航天器自主健康管理需求。
在交會對接過程中,航天器和目標飛行器通過各自配置的空空通信機及空空通信天線建立支持交會對接任務的星間鏈路。測控與通信分系統利用接收目標飛行器通過星間鏈路傳送的絕對定位信息,通過導航接收機完成相對定位解算,計算出實時的相對距離。空空通信機根據相對距離自主完成發射功率的換擋。
在出艙通信過程中,航天器通過出艙通信處理器及出艙通信天線與艙外航天員完成雙向通信。當參加出艙活動的航天員超過1人時,存在多名航天員同時與出艙通信處理器通信的需求。由于不同航天員和航天器的相對距離不同,航天員到航天器的通信鏈路存在遠近效應[12],最終導致相對距離遠的航天員無法與航天器建立正常通信鏈路。為了消除遠近效應,出艙通信鏈路采用碼分多址(CDMA)的通信體制結合自動功率控制算法,不同航天員采用不同的擴頻碼[13]。規定出艙通信處理器到航天員的通信鏈路為前向鏈路,航天員到出艙通信處理器的通信鏈路為返向鏈路。首先,通過開環方式,根據前向鏈路的接收功率,確定航天員的初始發射功率;然后,將返向鏈路的實際信噪比和理論信噪比的差值作為閉環控制的輸入,動態調節航天員的發射功率,保證不同航天員的發射信號到達出艙通信處理器的入口電平一致,從而消除遠近效應。
交會對接和出艙通信的自動功率控制方法流程見圖7。
圖7 自動功率控制方法流程Fig.7 Flow of automatic power control method
3 試驗驗證
物理層的“看門狗”設計和回讀重配置為常規設計,已經多次在軌飛行驗證,為成熟技術。應用層的導航接收機自主健康監測和管理設計,航天器掉電恢復后的自主建鏈設計,已經應用到神舟十二號及后續載人飛船,并經過單機、分系統和整船測試驗證,實際飛行任務中未出現長期非定位的情況和整船異常掉電恢復的情況。其余設計具體驗證情況如下。
3.1 射頻鏈路自主健康監測和管理驗證
寬波束中繼S終端增加自主健康監測和管理功能,更改后的寬波束S頻段遙測總線接口軟件已在神舟十二號載人飛船寬波束中繼S終端電性件上進行了更改驗證,驗證結果見表1。
表1 射頻鏈路自主健康管理驗證結果Table 1 Verification results of autonomous health management for RF link
3.2 交會對接自動功率切換驗證
神舟十二號載人飛船在軌完成與空間站核心艙的前向交會對接,空空通信采用擴頻模式,星間鏈路正常建立,雙向信息流正常運行。交會對接期間,神舟十二號載人飛船空空通信機加電,建立與核心艙的空空通信鏈路,空空加電后至對接完成鎖緊,期間接收信號強度指示如表2所示(北京時間2021年6月17日)[11]。神舟十二號載人飛船與核心艙之間星間鏈路的返向鏈路建立的基線距離為143km,優于通信距離為77km的要求。在擴頻模式時,若神舟十二號載人飛船與核心艙相對距離小于300m(質心坐標系相對距離)時,GNC分系統將切換至小功率置為有效,神舟十二號載人飛船和核心艙的工作模式均從擴頻大功率切換為擴頻小功率,接收信號強度指示值在15:26由4.2V變為3.7V,表示核心艙的空空通信機根據相對距離變化自動切換至小功率。同時,神舟十二號載人飛船空空通信機的發射功率遙測顯示,當前工作模式從大功率切換為小功率。
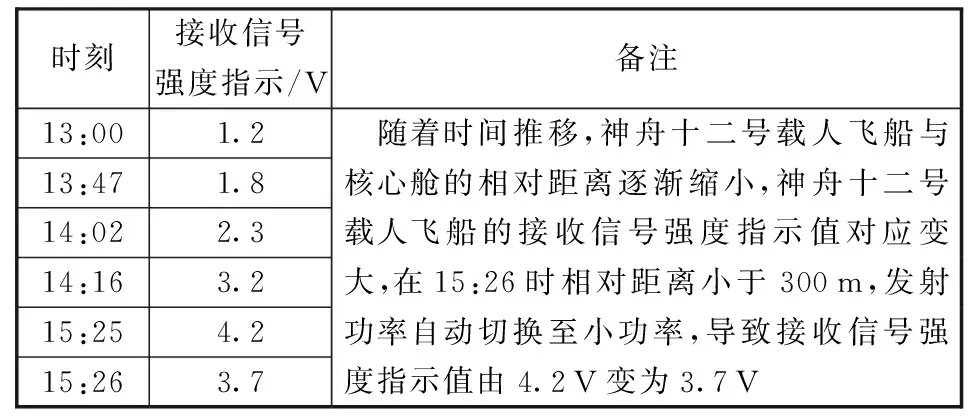
表2 空空通信機接收信號強度指示Table 2 RSSI of air to air communications equipment
3.3 出艙通信自動功率控制驗證
在出艙活動80m范圍內,距離最遠與最近處的信號衰減約為18dB。通過步進調整衰減器的衰減值模擬出艙航天員相對于出艙通信處理器的距離變化[13]。針對采用和不采用功率自動控制2種工作模式,分別進行試驗。①設置可調衰減器為0dB,通過功率計測試出艙通信處理器的接收功率值。②按照1dB的步進值增加可調衰減器的衰減值,并且記錄每次調整后出艙通信處理器的接收功率值,測試結果見表3。
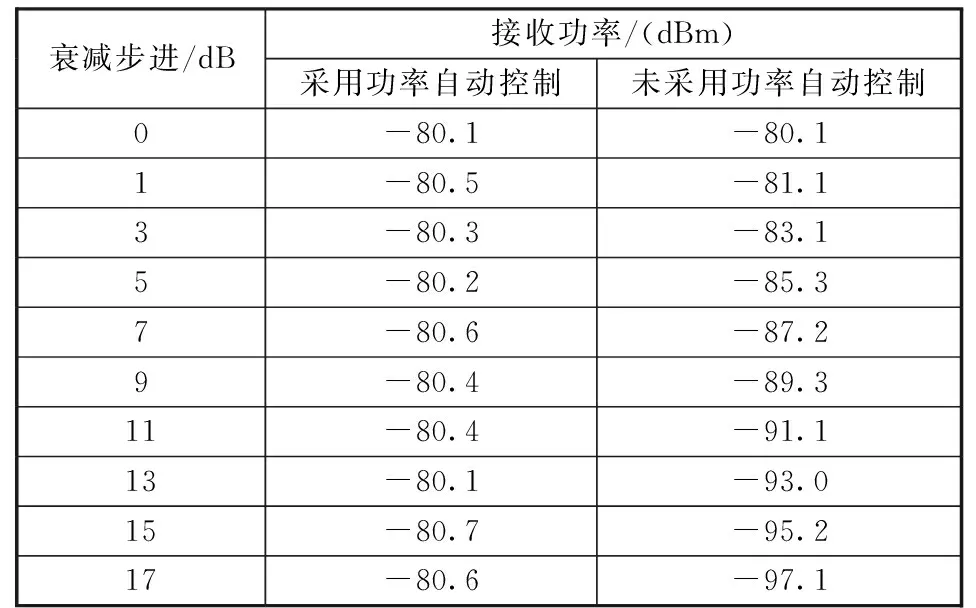
表3 功率自動控制測試結果Table 3 Test results of automatic power control
經過測試,未采用功率自動控制時,出艙通信處理器接收到的返向信號功率隨著鏈路衰減的變化而變化,波動范圍為-80.1~-97.1dBm,存在2名及以上航天員同時出艙活動由于遠近效應帶來通信鏈路異常的問題;采用功率自動控制時,出艙通信處理器接收到的返向信號功率始終維持在一個恒定值,約為-80dBm,有效地提高了多人出艙活動時的抗干擾能力,解決了遠近效應。
4 結束語
測控與通信分系統的自主健康管理方法是提高當前及未來航天器任務可靠性與安全性,以及降低任務的經濟成本和人力成本的重要手段。本文提出的自主健康管理方法,有助于實現航天器測控與通信分系統在軌工作狀態的自主監測和異常情況自主處理,并有助于提升整個航天器的可靠性和飛行任務的安全性。本文提出方法分別從分系統自身單機的物理層、數據鏈路層和應用層進行設計,保障自主健康管理,不依賴集中式專用設備實現,提升了系統可靠性。后續將進一步開展自主健康管理方法的分布式和集中式的融合架構設計,進一步提升自主健康管理方法的通用性和可靠性。
猜你喜歡
今日農業(2022年15期)2022-09-20 06:56:20
現代裝飾(2020年7期)2020-07-27 01:27:42
流行色(2020年1期)2020-04-28 11:16:38
建材發展導向(2019年10期)2019-08-24 06:26:30
建材發展導向(2019年10期)2019-08-24 06:26:20
藝術啟蒙(2018年7期)2018-08-23 09:14:18
海峽姐妹(2017年7期)2017-07-31 19:08:17
Coco薇(2017年5期)2017-06-05 08:53:16
雜文月刊(2016年1期)2016-02-11 10:35:51
現代企業(2015年8期)2015-02-28 18:54:47