一種全電推進衛星測控任務仿真分析方法
2023-09-09 06:39:12陳杰徐楠王海旭呂原草陳亮亮魏強
航天器工程 2023年4期
陳杰 徐楠 王海旭 呂原草 陳亮亮 魏強
(中國空間技術研究院通信與導航衛星總體部,北京 100094)
全電推進衛星取消了化學推進系統,采用電推進系統完成衛星變軌、位保等任務,其最大應用優勢是[1-2]:①減小衛星發射質量,提高承載效率;②降低衛星綜合成本,提高市場競爭力;③突破化學推進比沖限制,增加衛星在軌服務壽命;④實施小推力推進,有助于有效載荷的精確控制。目前,國內已在多個衛星任務中完成電推進系統的在軌點火試驗,以及完成了地球靜止軌道衛星的軌道保持任務,但尚無基于電推進系統的軌道轉移應用實踐。由于電推進系統提供的推力小,一般為幾十毫牛到幾百毫牛,全電推進衛星進入目標軌道的時間長達數月,其變軌控制策略也不同于采用化學推進系統的衛星;同時,為保證電推進變軌推力指向和能源需求,衛星的姿態會不斷調整,并且在轉移軌道初期軌道高度較低時,地面測控站交替可見,可視弧段少且短。因此,如何保證軌道轉移過程中測控任務設計對任務成敗起著決定性的影響,也是工程應用亟需解決的問題[3]。
對于化學推進衛星,其變軌策略相對成熟,在整個變軌過程中衛星姿態也相對固定且單一,在其任務設計時,變軌策略一般都采用5次點火方案,并且可以在每次關鍵事件前數小時開始,衛星測控天線能覆蓋地面測控站,即有足夠長的測控弧段安排測控任務[4]。在測控任務分析時,由于化學推進衛星星載測控系統的設計基本可實現近全空間覆蓋,因此在實際工程應用中通過衛星與地面測控站視距可見即確定為測控弧段。而對于測控弧段內測控鏈路的可用性復核,則通常使用編制專用計算表格的方式,由測控弧段內的最遠星地距離、測控天線增益的技術指標進行復核計算。但是,這種方式無法體現測控弧段內衛星姿態變化及測控天線方向圖實際狀態(特別是在測控天線方向圖的干涉區)對測控鏈路的影響。因此,在工程應用中,通常會在標稱的測控弧段開始后通過不斷嘗試接收衛星遙測數據、發送空閑數據,以判斷衛星在當下是否具備執行測控任務的狀態。文獻[5]中以星地通信為例闡述了通信鏈路余量計算的方法。文獻[6]中以中繼通信系統為例對中繼鏈路進行了動態分析和計算。文獻[7]中以敏捷衛星為例對衛星測控鏈路性能進行了仿真分析。目前,尚未查到與全電推進衛星測控任務分析相關的公開文獻。
為解決我國全電推進衛星在軌工程應用問題,本文提出了一種全電推進衛星測控任務分析方法,針對測控任務設計的不同需求可實現測控任務的仿真分析,可為全電推進衛星在軌工程應用提供支持。
1 測控任務分析方法
衛星測控任務分析流程如圖1所示。①根據衛星總體輸入,創建一個測控任務分析場景,后續可在場景中加入參加任務的衛星和地面測控站等對象。在創建場景時需要根據衛星總體任務確定起始時間、結束時間及星歷時刻等。②根據衛星總體輸入,確定測控任務場景中衛星姿態、衛星軌跡、測控天線射頻特性,以及可用地面測控站特性(包括最低可用跟蹤仰角、等效全向輻射功率、接收系統品質因數G/T等)。③確定測控任務分析的各項約束條件,主要為測控鏈路余量。④開展系統分析,通常可采用仿真軟件進行系統分析。⑤生成分析結果,將任務分析的結果進行處理,可采用圖表甚至動畫的形式直觀展示系統分析的結果。⑥重復步驟③~⑤,直至分析結果滿足工程應用的要求。
對于測控任務分析方法中的②,在傳統測控任務分析中通常使用編制專用計算表格,而受限于表格計算的方法,在任務分析中需要簡化測控天線的射頻特性,僅考慮測控天線技術指標提出的最低增益及對應的測控覆蓋區,這種簡化不能全面反映測控天線實際方向圖對測控鏈路性能的影響,通常僅適用于在軌無大角度姿態機動衛星的測控鏈路分析。為解決上述問題,本文將測控天線方向圖導入仿真軟件,在測控任務分析中考慮實際測控天線方向圖對測控鏈路性能的影響。測控任務分析方法中的④,同樣受限于專用計算表格的方法,在傳統測控任務分析中通常給出整個任務過程中最遠的星地距離,然后將該距離代入專用計算表格,復核測控鏈路余量,而這種簡化不能全面反映衛星軌道及姿態動態變化對測控鏈路性能的影響,同樣僅適用于在軌無大角度姿態機動衛星的測控鏈路分析。
對于測控上行鏈路,星載應答機接收的功率如式(1)所示[8]。
[PR]=[EG]-[LF]-[LA]-[LTr]-
[LP]+[GR]-[LR]
(1)
式中:EG為地面站發射的等效全向輻射功率;LF為自由空間損耗;LA為大氣損耗;LTr為指向損耗;LP為極化損耗;GR為測控天線的接收增益;LR為測控天線至星載應答機的饋線損耗。
對于測控下行鏈路,地面站總的接收信噪譜密度比如式(2)所示[8]。
[C/N0]=[ES]-[LF]-[LA]-[LTr]-
[LP]-[κ]+[G/T]
(2)
式中:衛星發射的等效全向輻射功率[ES]=[PT]-[LT]+[GT],其中,PT為星載應答機發射功率,LT為星載應答機至測控天線的饋線損耗,GT為測控天線的發射增益;κ為玻爾茲曼常數。
在上述參數中,除EG,LR,PT,LT,κ,G/T外,其余所有參數均與衛星和地面站距離、衛星和地面站的角度息息相關,采用傳統編制專用計算表格的方式實時計算衛星與地面站距離的變化及衛星姿態的變化引起的測控鏈路性能變化是不現實的。本文通過動力學和電磁學等多學科耦合仿真實現全電推進衛星的數字孿生,做到全電推進衛星軌道轉移數字模型實時伴飛。
2 仿真分析及結果
為驗證本文的方法,仿真分析某全電推進衛星的測控任務。該全電推進衛星的變軌策略采用文獻[9]中提出的推力矢量分段固定法簡化策略,其變軌過程分為以下3個階段。①推力矢量沿軌道切向,作用是提高半長軸,盡快將近地點高度抬高至1000km以上,離開稠密大氣,以減小大氣阻力攝動影響。②推力矢量在軌道平面內分量沿軌道切向,作用是提高半長軸,同時推力矢量與軌道平面有一固定夾角ψ1,作用是壓低傾角。ψ1在軌道輻角90°和270°的2個點前后改變正負。此階段半長軸增大至42164km附近,軌道周期接近24h。與①相比,推力增加了軌道平面外的分量。③推力矢量在軌道平面內分量垂直于軌道拱軸,作用是減小偏心率,同時推力矢量與軌道平面有一固定夾角ψ2,作用是繼續壓低傾角。ψ2同樣需要在軌道輻角90°和270°的2個點前后改變正負。此階段完成偏心率最終修正,衛星進入傾角為0°的圓形地球靜止軌道。
相應地給出上述全電推進衛星星載測控系統設計。由于衛星背地面布局限制,衛星背地面無法放置測控天線,因此必須根據上述限制和總體任務需求對星載測控系統設計進行優化調整。圖2給出了星載測控系統方案,其由2臺應答機、2組測控天線、2臺測控放大器及相關無源設備組成。2組測控天線布置在衛星對地面,同時為兼顧衛星背地面的測控覆蓋,安裝在衛星本體坐標系XOZ面內,1組與+X和+Z的夾角為45°,另外1組與-X和+Z的夾角為45°,單副測控天線覆蓋指標為90°半錐角。理論測控天線覆蓋如圖3所示。從圖3中可以看到:由于衛星背地面未布置測控天線,在背地面(-180°~-135°)及(+135°~+180°)范圍內為理論測控覆蓋盲區。
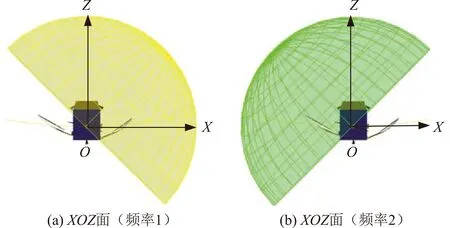
圖3 理論測控天線覆蓋Fig.3 Theoretical TT&C antenna coverage
由于衛星外部設備及衛星本體引起的遮擋等原因,全向天線方向圖成不規則形狀,在工程中一般通過電磁場仿真軟件計算全向測控天線在整星條件下的仿真數據,同時考慮飛行事件,將太陽翼收攏展開、反射面天線收攏展開的狀態計算在內,并以此作為實際測控鏈路性能分析的依據。
仿真軟件支持將外部天線方向圖應用于鏈路性能仿真分析,要求文件格式必須按照仿真軟件規定的格式生成文件。另外,由于原來的電磁場仿真軟件所定義的天線方向圖的格式及坐標系較為特殊,與仿真軟件中的定義存在差異,因此需要進行數據格式轉換,之后才能用于仿真軟件測控鏈路性能仿真分析[10]。
圖4為實際測控天線方向圖。通過與圖3對比可以看到:理論測控覆蓋基本與實際測控覆蓋一致,而理論測控覆蓋盲區在實際測控覆蓋中也并非完全不可見,只是此處天線增益小。但是,當全電推進衛星軌道高度較低時,其可視弧段短且少,此時需要充分利用測控天線旁瓣覆蓋區,通過采用實際天線方向圖并經測控鏈路性能分析,才能開展更為精細的任務分析,支持測控任務的實施。
在仿真分析中,為盡可能跟蹤全電推進衛星,并考慮技術經濟一體化,分別在亞洲、歐洲和南美洲選擇3個典型地面測控站。
圖5給出了地面測控站某測控弧段內下行性能實測與本文仿真分析方法結果比對。可以看到:本文仿真分析方法與地面測控站實測結果吻合較好,也證明了該方法在實際應用中的可行性,說明對測控任務分析是具有指導意義的,而兩者的差異主要是由測控天線仿真方向圖與實測方向圖的差異造成的。
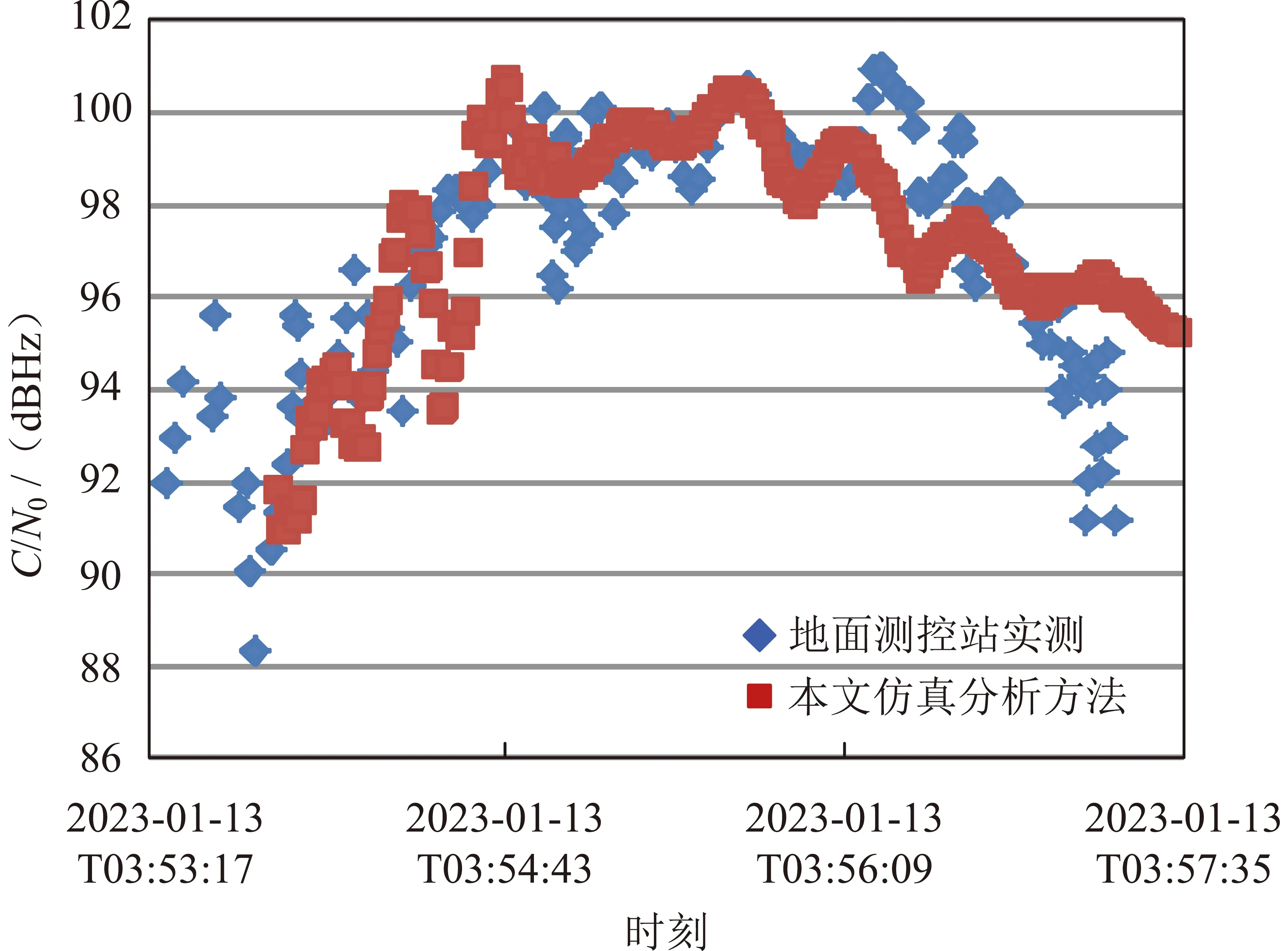
圖5 實測數據與本文仿真分析方法結果比對Fig.5 Comparison between actual data and results of simulation analysis method presented in this paper
圖6給出了典型仿真結果,橫坐標為以衛星發射為0時刻的飛行時長,縱坐標為C/N0。其中:白色色塊為利用理論天線視場時地面測控站的可視弧段,黑色色塊為利用外部天線方向圖時地面測控站的可視弧段,實線為可視弧段內地面測控站接收的C/N0,虛線為地面測控站解調余量為3dB時的C/N0閾值。從仿真結果可以看到:利用外部天線方向圖時,地面測控站的可視弧段遠大于利用理論天線視場時地面測控站的可視弧段,這對于全電推進衛星這樣測控任務復雜的航天器非常有利,因為這樣就能留出更多的測控弧段進行測控任務的設計與實施。但是,從圖6(b)看到,某些測控弧段雖然地面測控站視距可見衛星,但是通過測控鏈路計算分析,測控弧段中某些時段鏈路不可用。因此,在測控任務分析時,這些時段內不設計測控任務,而在實際測控任務執行中,地面測控站也可避免不必要的嘗試,從正向設計的角度出發,可以更為科學合理地安排測控任務。
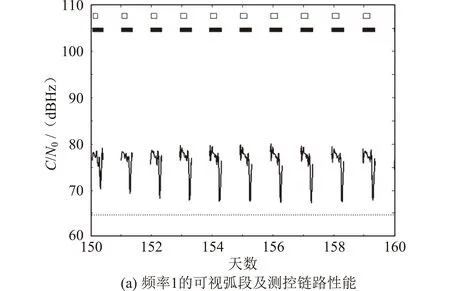
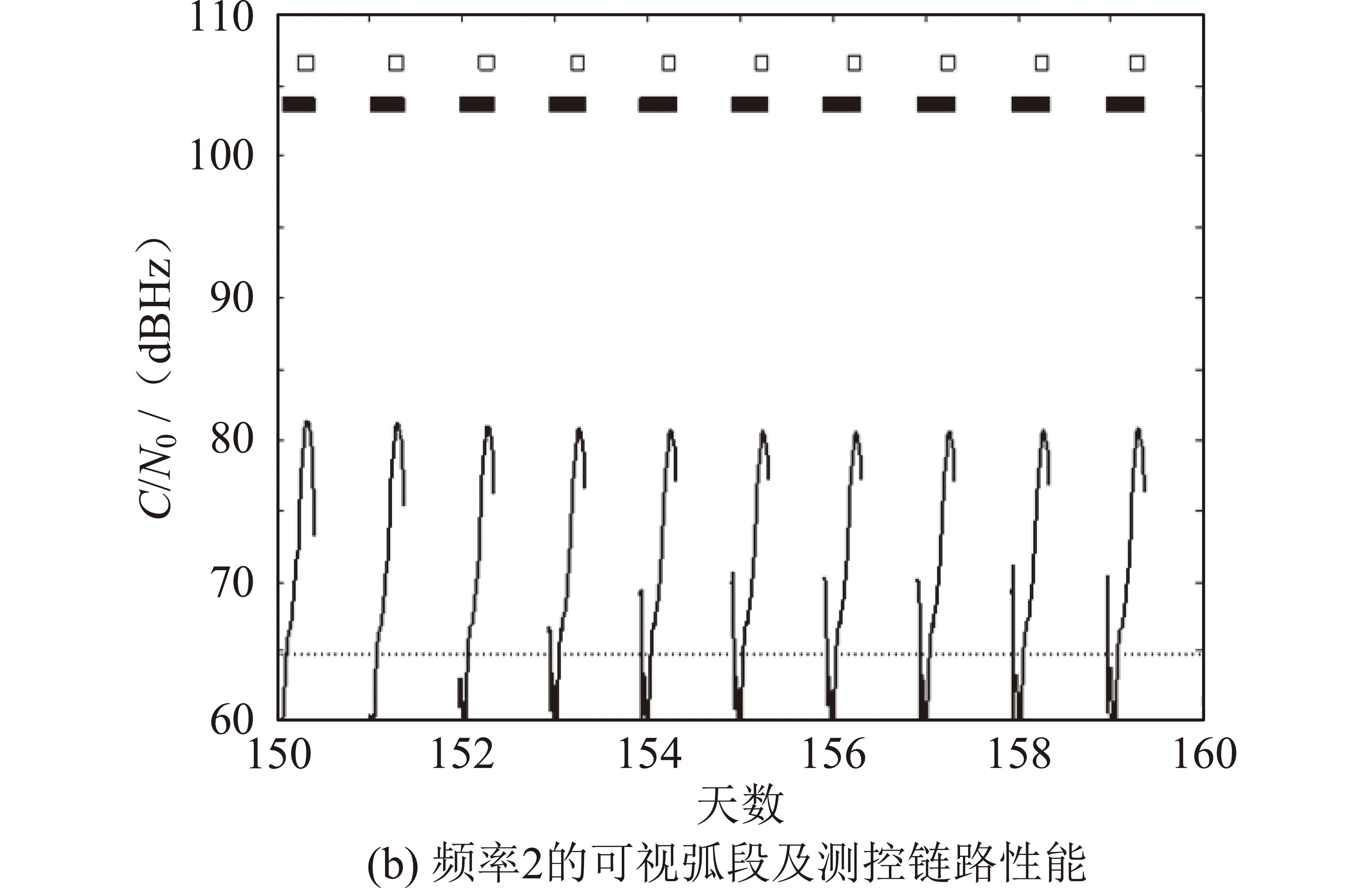
圖6 全電推進衛星的典型仿真結果Fig.6 Typical simulation results of all-electric propulsion satellite
表1給出了利用理論天線視場和利用外部天線方向圖時地面測控站的可視弧段時長統計,在統計過程中已將地面測控站接收C/N0低于閾值的弧段剔除。從表1中可以看到:利用外部天線方向圖所得到可視弧段約為利用理論天線視場所得到可視弧段的1.92倍。由圖5的結果可知:測控天線仿真方向圖與實測方向圖的差異會對實際任務的弧段有一定影響,但不會影響本文仿真方法在實際應用中的效果和對測控任務分析的指導意義。因此,采用本文仿真分析方法可以更為科學有效地利用測控弧段,更為真實地預計實際測控覆蓋及衛星姿態變化對測控任務分析造成的影響。

表1 可視弧段時長統計Table 1 Visual radian duration statistics min
3 結束語
全電推進衛星以其高承載比、高性價比在空間技術領域,尤其是在通信衛星上成為發展熱點方向。本文提出了一種全電推進衛星測控任務分析方法,在建立測控任務分析場景的基礎上,綜合考慮衛星姿態、衛星軌跡、實際天線方向圖、地面測控站等多重因素,通過動力學和電磁學等多學科耦合仿真手段,能更為真實地預計實際測控覆蓋及衛星姿態、實際測控天線方向圖變化對測控任務分析造成的影響。在實際工程應用中,本文方法可以較為準確地預測衛星測控可用弧段,為衛星測控任務的有效實施提供重要支撐。