含時變輪胎側偏剛度的車輛質心側偏角魯棒估計
2023-09-13 12:51:54陳建鋒葛新元湯傳業葉貽財
重慶理工大學學報(自然科學) 2023年8期
陳建鋒,吳 強,葛新元,湯傳業,葉貽財
(1.江蘇大學 汽車工程研究院, 江蘇 鎮江 212013;2.常州工學院 電氣信息工程學院, 江蘇 常州 213032)
0 引言
車輛質心側偏角是車輛主動安全系統高效工作的重要前提[1-2]。由于成本原因,此類信息難以在量產車上直接測得[3]。基于普通車載傳感器的軟測量方法是一類有效的替代方案[4]。其中,基于運動學模型和動力學模型的軟測量方案最具有代表性[5]。
相比較而言,基于動力學模型的軟測量方案對傳感器信號準確程度的依賴性較弱[6]。但是,其對車輛動力學模型的精度要高,特別是輪胎力信息[7]。在眾多輪胎模型中,線性輪胎模型具有結構簡單、易于在嵌入式系統上實現等優點。但是,其在非線性區域存在較為嚴重的失真。有研究人員提出了一種輪胎側偏剛度自適應變化的模型,利用系統的反饋信息實時對輪胎側偏剛度進行修正[5,8]。但是,此類方案顯著增加了計算量,同時對反饋信號要求較高。另一方面,將基于運動學模型和動力學模型的軟測量方案進行融合,可以在一定程度上解決上述輪胎側偏剛度的表征難題。Cheli[9]和Villano等[10]提出了一類加權融合方案,可以根據車載傳感器信號的變化情況有效規避非線性的動力學問題。但是,此類方案結構復雜,且未涉及傳感器累積誤差的消除。
在車輛質心側偏角的估計過程中,橫擺率和側向加速度等傳感器量測信號必不可少。慣性測量單元(inertial measurement unit,IMU)是提供上述信息的重要傳感器。受成本約束,車載的低成本IMU中常存在量測信號與真實信號不匹配現象(即量測突變或信息丟包)[11],進而降低車輛質心側偏角的估計效果。Chang等[12]提出一種考慮傳感器信號不匹配的估計方法,重點分析信號不匹配情況下的穩定性。Villano等[10]設計了一種互為輸入、輸出的雙無跡卡爾曼估計方案,以獲取相對可靠的信號輸入。Chen等[13]提出一種基于平滑變結構濾波的車輛運動狀態魯棒估計方案,以削弱異常信號帶來的影響。
總體而言,目前很少有研究人員考慮從量測信號預處理的角度研究車輛質心側偏角的魯棒估計問題。此外,在現有的基于動力學的質心側偏角估計方法中,鮮有考慮估計精度與計算負擔之間的合理取舍。因此,有必要從上述角度出發,研究基于普通車載傳感器的車輛質心側偏角高精度魯棒估計方法。
1 問題的提出
現有的車輛質心側偏角估計方案中,需要設計附加的功能模塊對非線性區域的輪胎側偏剛度進行修正,存在結構復雜、計算量大的缺點。此外,車載傳感器的量測信號中的突變也會影響車輛質心側偏角的估計效果。
本文中提出一種含時變輪胎側偏剛度的車輛質心側偏角魯棒估計方法,整體結構如圖1所示。首先,對車載傳感器輸出的橫擺率和側向加速度信號進行可靠性判別。其次,在線性輪胎模型的基礎上,給出一種基于側向加速度信號的輪胎側偏剛度實時計算方法,同時利用未知輸入觀測器(unknow input observer,UIO)獲取驅動輪的縱向力。最后,采用容積卡爾曼濾波器(cubature Kalman filter,CKF)實現車輛質心側偏角的魯棒估計。
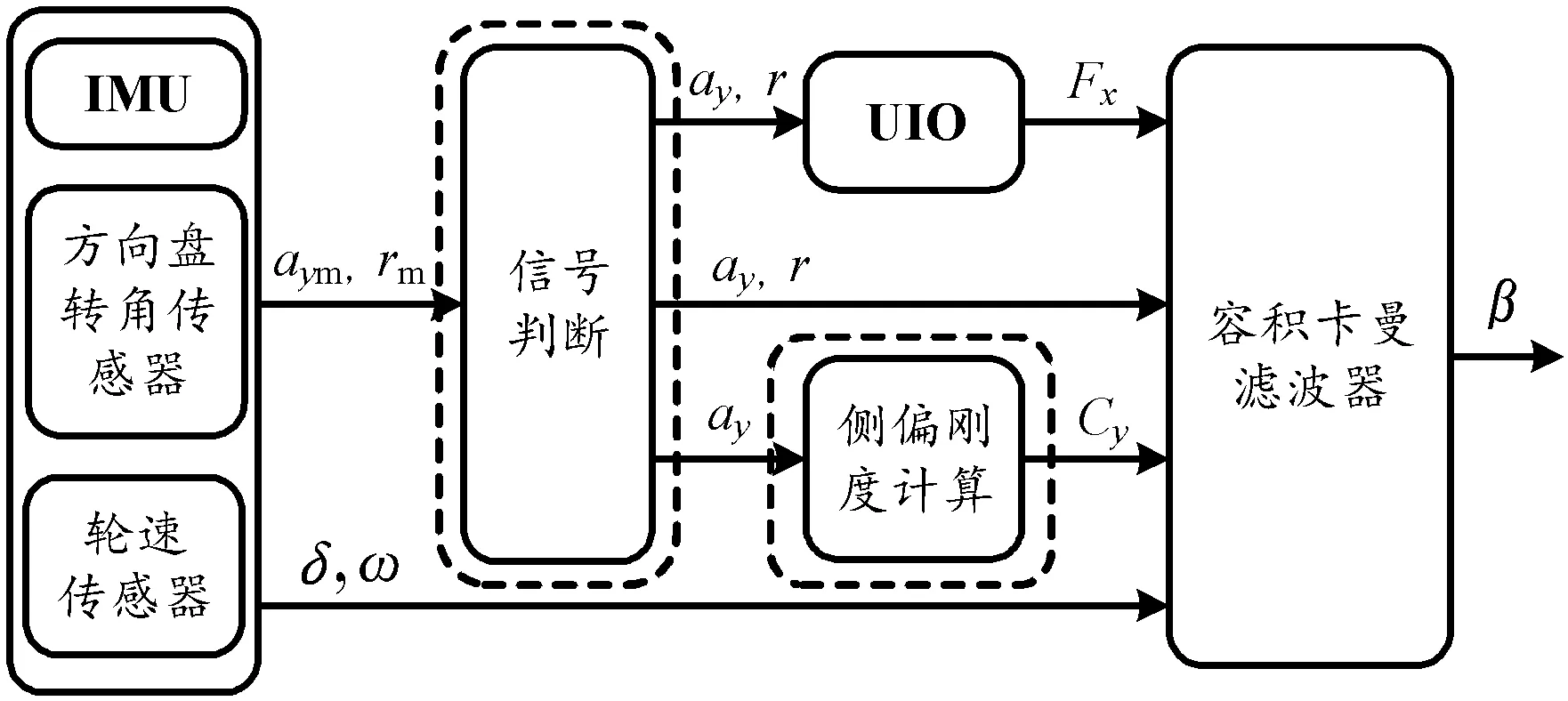
圖1 整體結構示意圖
2 不可靠量測信號的濾除
車載慣性器件為低成本器件,常存在量測信號不可靠問題。考慮到方向盤轉角信號與橫擺率和側向加速度信號緊密相關,即方向盤的轉動會使橫擺率和側向加速度量測信號發生改變(典型的結果如圖2所示,其中k1、k2分別為對應的縮放系數,具體可通過下文的“尺度變換”得到)。針對橫擺率和側向加速度量測信號,提出如下的基于方向盤轉角信號的不可靠量測信號濾除方法。
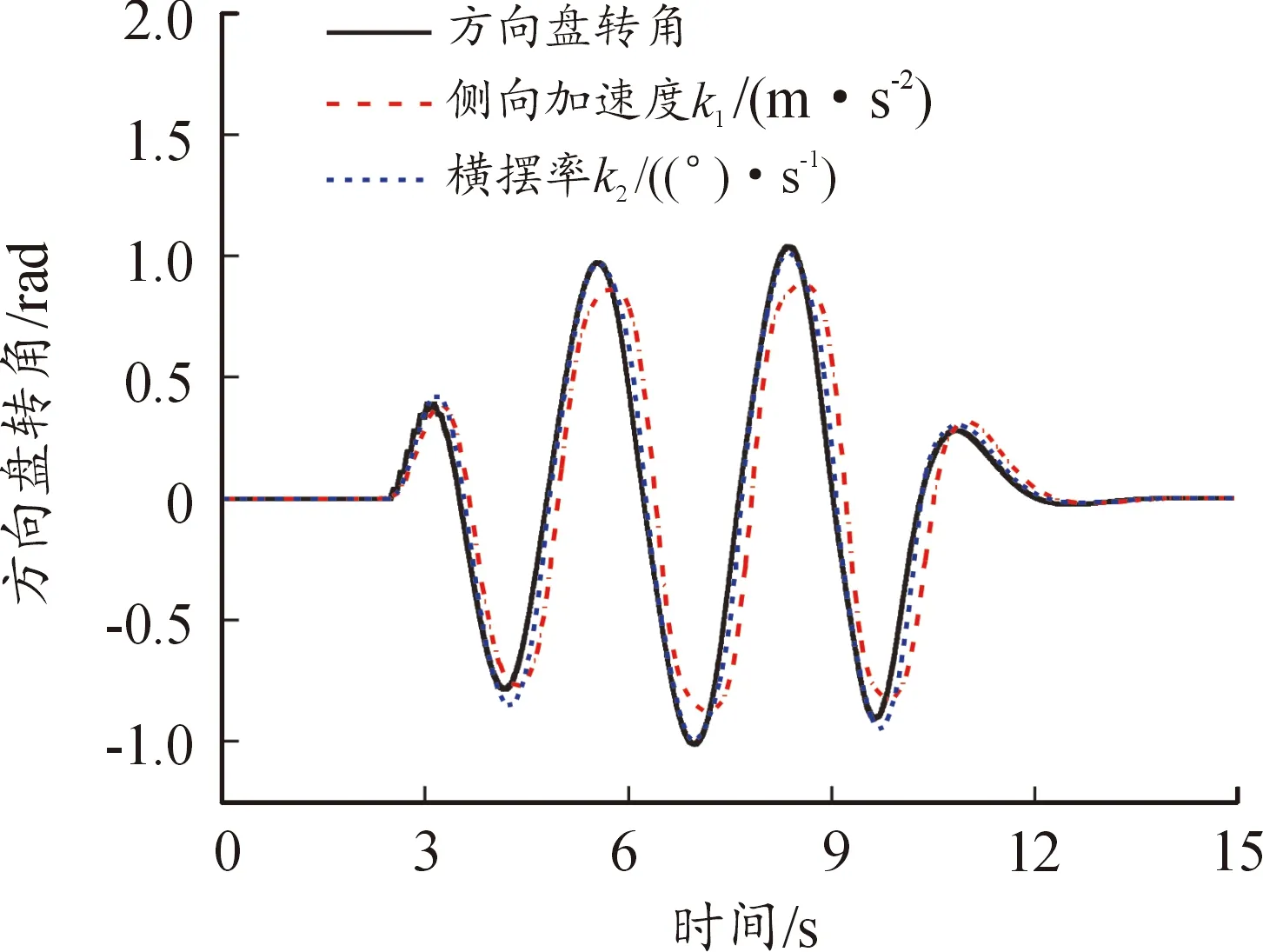
圖2 典型車載傳感器信號
在車輛正常行駛時,有如下關系[14]:
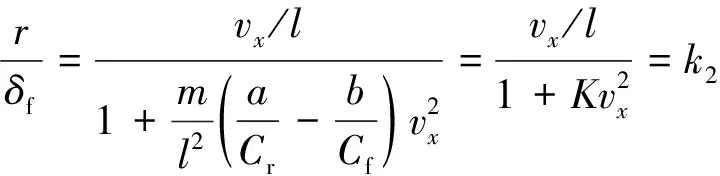
(1)
式中:l為車輛軸距,K為穩定性因數。車輛轉向大多具有輕微轉向不足的特性,為了減少計算量,此處取K=0.01 s2/m2。
車載慣性器件量測信號中噪聲較大[15-16](見表1),小幅的突變難以檢測。可以方向盤轉角的量測信號為基準,經式(1)所示的“尺度變換”后再分別進行一定幅度的上下偏移,得到橫擺率和側向加速度量測信號的可信區間。將處于該區間內的信號視為可靠信號,反之視為不可靠信號。對不可靠信號,用上一時刻的值進行替代。
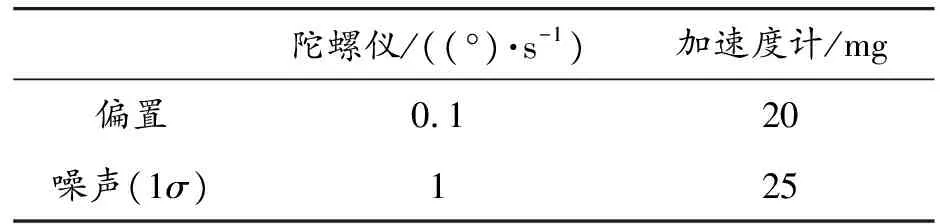
表1 車載慣性傳感器典型配置
考慮到車載慣性器件的量測精度,對橫擺率信號,其可信區間偏移量取0.25。側向加速度的可信區間由方向盤轉角δ信號經過“尺度變換”得到,具體方法與此類似。
3 時變輪胎側偏剛度的計算
傳統的線性輪胎模型在非線性區域無法準確刻畫輪胎力特性。考慮含時變輪胎側偏剛度的輪胎模型:
Fyf(t)=Cyf(t)αf
Fyr(t)=Cyr(t)αr
(2)
輪胎側偏剛度受輪胎氣壓、垂向載荷、輪胎-路面附著系數μ以及輪胎側偏角等影響[17],其中垂向載荷和輪胎側偏角的影響最為顯著。通常認為輪胎側偏剛度與垂向載荷之間存在如下關系[18]:

(3)
式中:Fz(t)為t時刻的垂向載荷,a0、a1、a2為系數。但是,車輛轉彎時垂向載荷的前后轉移較小。對于單軌車輛模型,常認為前、后軸垂向載荷的波動較小(典型結果見圖3)。考慮到車輪的垂向力難以直接獲取,式(3)所示的方案不易推廣使用。
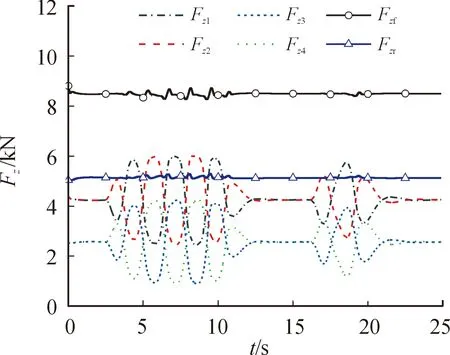
圖3 典型機動過程中的前、后軸垂向載荷
進一步,考慮輪胎側偏角的影響。如圖4所示,在非線性區域,輪胎側向力隨輪胎側偏角的增大而顯著降低,當輪胎側偏角超出特定的范圍后,輪胎側向力趨于飽和。
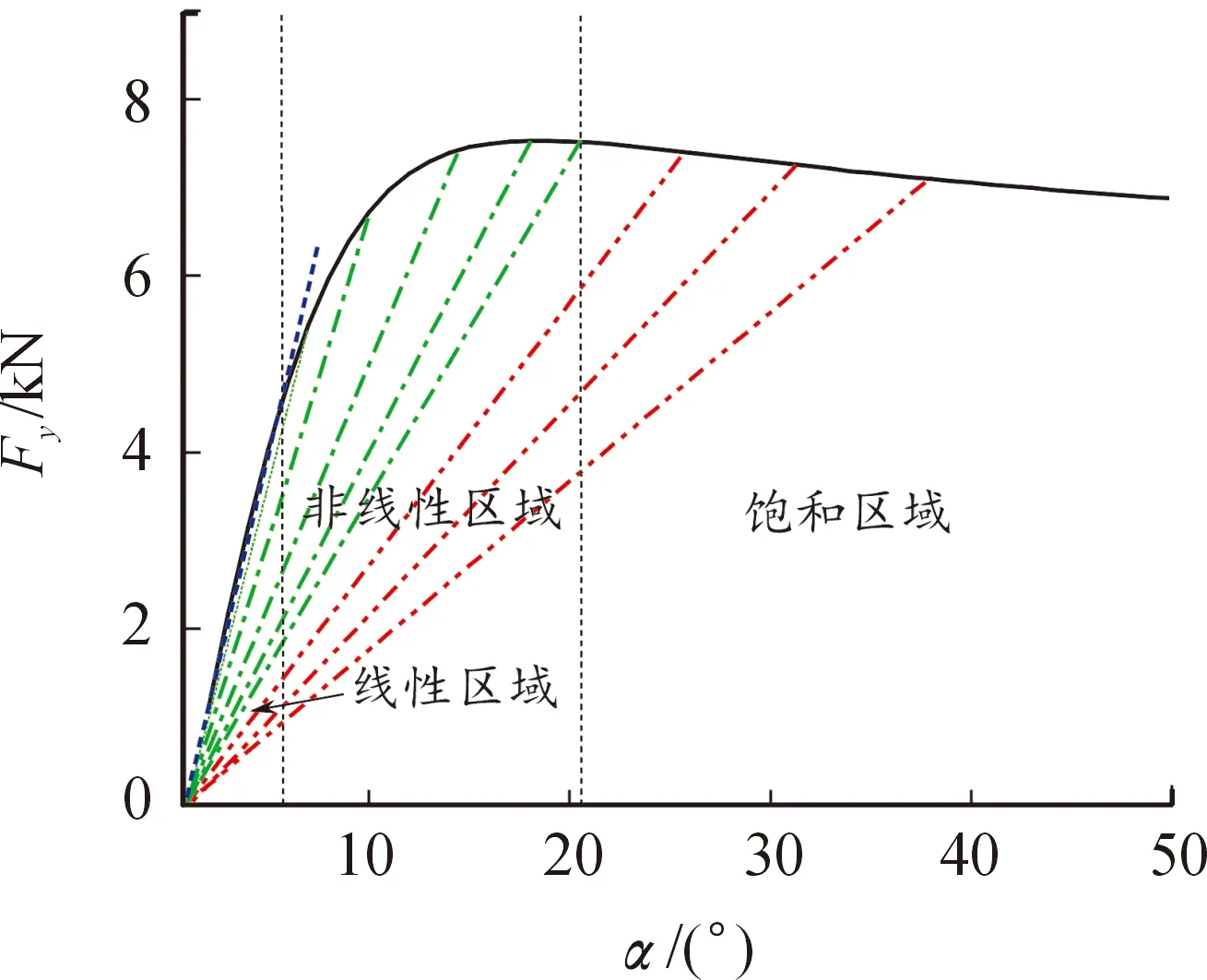
圖4 特定載荷下某輪胎側向力與輪胎側偏角的關系
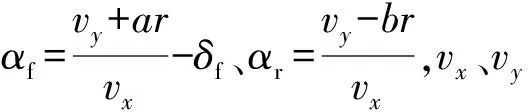
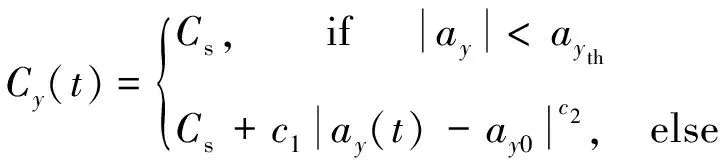
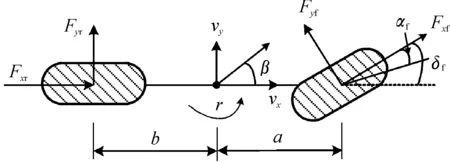
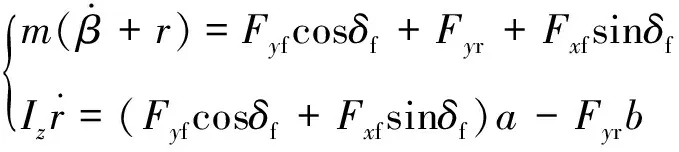
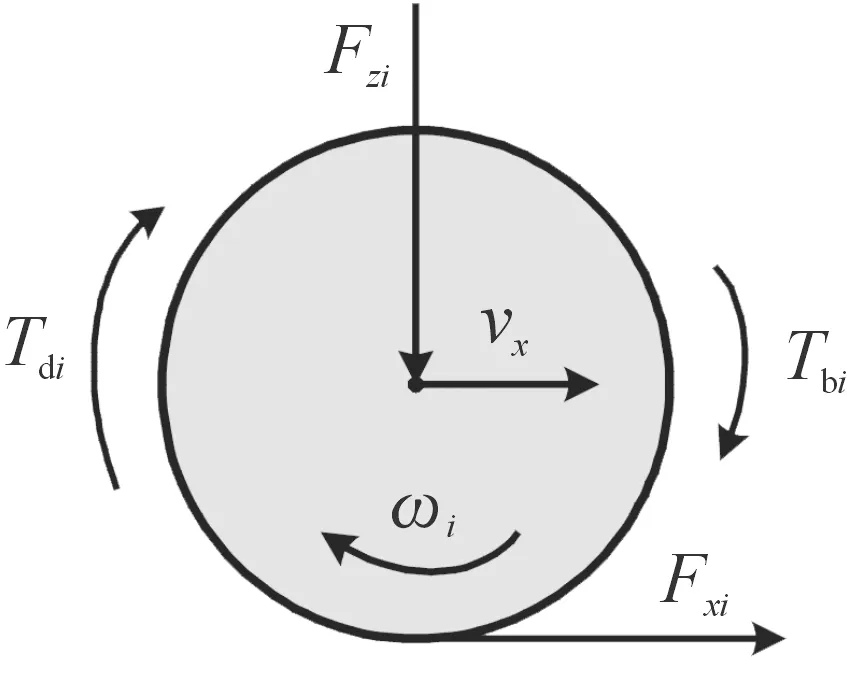
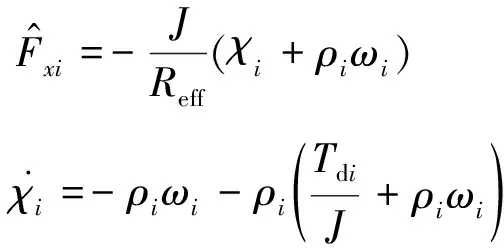
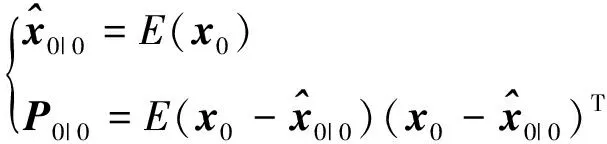
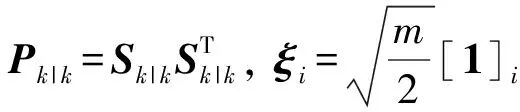
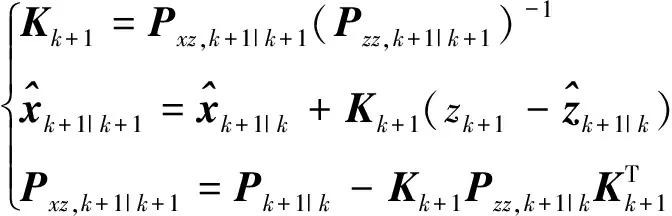
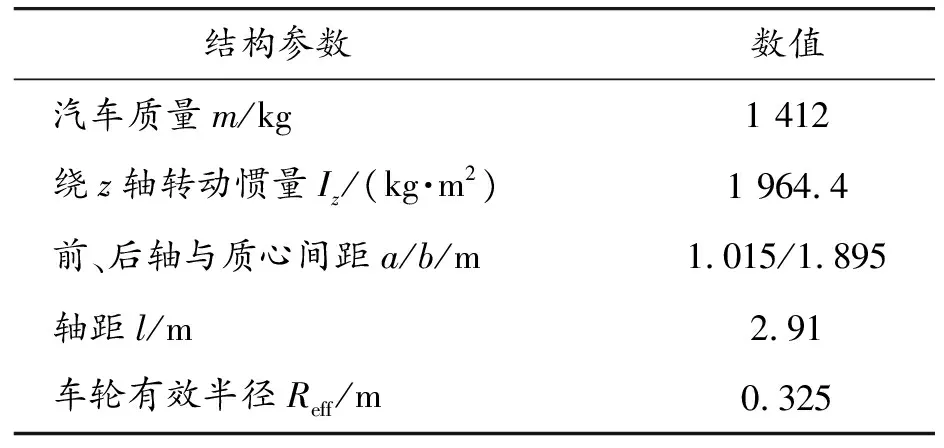
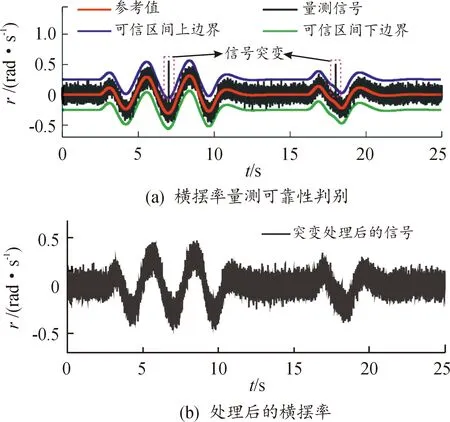
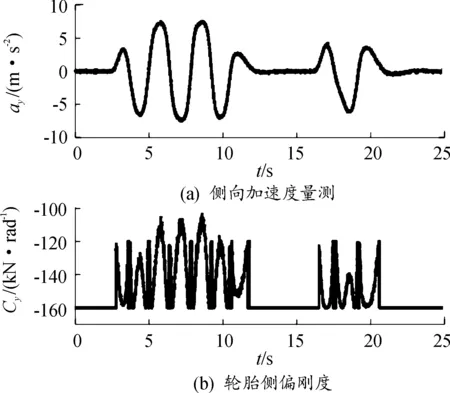
注意到輪胎側偏角難以準確獲取,可以考慮輪胎側偏角與側向加速度之間的近似對應關系(見圖5,其中k為縮放系數),利用車載傳感器輸出的側向加速度信號代替輪胎側偏角:線性區域內(ay(t) 圖5 典型機動過程中側向加速度與前、后軸輪胎側偏角之間的近似對應關系 (4) 式中:Cs為線性區域內的常值輪胎側偏剛度,c1、c2為系數,ay(t)為實時側向加速度,ayth為非線性區域起點處的側向加速度。上述參數可以根據輪胎動力學特性、通過多次試驗確定。 對圖6所示的單軌車輛模型,僅考慮側向及橫擺運動,有: 圖6 單軌車輛模型示意圖 (5) 單個車輪(如圖7所示)的動態平衡方程可表示為: 圖7 車輪的動態平衡示意圖 (6) 另一方面,車輛行駛時常受不平路面等外界干擾。系統存在擾動時,采用UIO可使觀測誤差趨近于零[19],相關的UIO結構可表示為: (7) 式中:χi為中間變量,ρi為正常數(其值越大,UIO的響應越快、誤差也越小)。 對上述系統進行離散化并構造量測方程,有: xk+1=f(xk,uk)+wk zk=h(xk,uk)+vk (8) 式中:系統狀態向量xk+1=[βk+1rk+1]T,量測向量zk=[ay,krk]T,f( )和h( )分別為過程函數與量測函數,wk和vk分別為k時刻的過程噪聲和量測噪聲。 車輛系統具有強非線性特性,CKF基于三階球面徑向容積準則,使用一組容積點來逼近具有附加高斯噪聲的非線性系統的狀態均值和協方差,可有效處理強非線性問題[20],具體過程如下: 1) 初始化 (9) 2) 時間更新 ① 選取容積點: (10) ② 容積點傳播: (11) ③ 一步預測的估計與方差: (12) 3) 量測更新 (13) 容積點經過量測函數傳播得: (14) 量測過程中一步預測、預測方差及協方差分別為: (15) (16) (17) k+1時刻的狀態估計及估計方差為: (18) 利用CarSim中的C級車對所提出的方法進行驗證,相關的結構參數見表2。具體工況由方向盤正弦輸入和雙移線機動組成,車速110 km/h,μ=0.85,橫擺率信號在7 s和18 s處分別存在0.8 rad/s和0.6 rad/s的突變。 表2 車輛的結構參數 圖8(a)中給出了利用可靠性判別方法得到的橫擺率上、下邊界,圖8(b)為濾除突變后的橫擺率信號。顯然,突變信號已被濾除并被有效替換。 圖8 橫擺率信號 圖9為驗證過程中的側向加速度信號和輪胎側偏剛度曲線。隨著側向加速度的變化,輪胎側偏剛度的數值出現相應的增加或減小,符合輪胎的動力學特性。圖10為車輛質心側偏角的估計結果。 圖9 側向加速度信號和輪胎側偏剛度曲線 圖10 車輛質心側偏角的估計結果 圖10(a)中的側偏剛度1為根據文獻[18]得到的結果,側偏剛度2為根據本文所提出的方案得到的結果。為便于比較,同時考慮了輪胎側偏剛度為常值以及不存在傳感器信號突變的情況。可以發現,在非線性區域,根據本文中提出的方法得到的車輛質心側偏角存在一定的相位超前(雙移線部分更為明顯)。在方向盤正弦輸入部分,本文中提出的方法相對于基于垂向力的方案具有明顯的精度優勢;在后續的雙移線部分,2種方法的估計誤差近似。但是,根據本文中提出的方法得到的質心側偏角與參考曲線在形狀上更為一致,且差距來源于相位的超前(見圖10(a)的子圖部分)。總體而言,利用本文中提出的方法可以得到魯棒性更好的估計結果。 需要注意的是,相位的超前一般利于系統的實時控制,相關的改進方案值得進行深入研究。 復雜的行駛工況下,利用本文中提出的車輛質心側偏角估計方案可以比較準確地獲取時變的輪胎側偏剛度信息;對于較大幅度的傳感器異常量測,也可以有效識別并進行合理替換,最終得到魯棒的車輛質心側偏角估計結果。 此外,車輛質心側偏角的估計結果具有一定的相位超前,可以考慮對方案進行改進,以進一步提升其性能。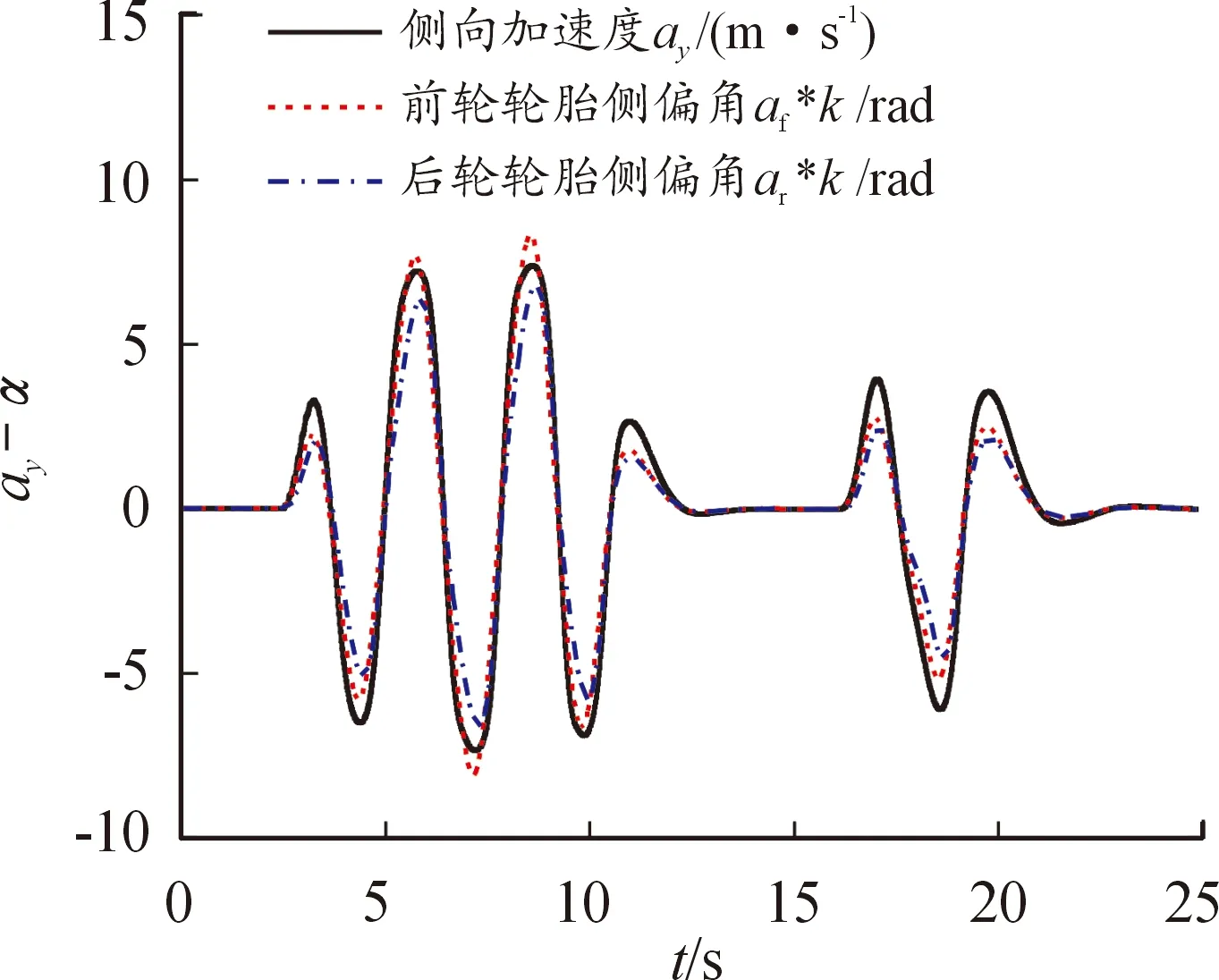
4 基于CKF的車輛質心側偏角估計









5 數值驗證

6 結論
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
鴨綠江(2021年35期)2021-04-19 12:24:18
中學生數理化·七年級數學人教版(2020年10期)2020-11-26 08:24:50
考試與評價·高一版(2020年6期)2020-11-02 02:45:24
數學物理學報(2020年2期)2020-06-02 11:29:24
中國生殖健康(2019年3期)2019-02-01 06:12:26
光學精密工程(2016年6期)2016-11-07 09:07:19
鑿巖機械氣動工具(2016年3期)2016-03-01 04:00:25
海軍航空大學學報(2015年3期)2015-11-11 17:20:00
核科學與工程(2015年4期)2015-09-26 11:59:03