基于模糊情感神經(jīng)網(wǎng)絡(luò)的多缸液壓機(jī)反步滑模控制策略
2023-09-13 12:52:58趙叔豪孔德丁
賈 超,趙叔豪,孔德丁
(1.天津理工大學(xué) 電氣工程與自動(dòng)化學(xué)院, 天津 300384;2.天津市復(fù)雜系統(tǒng)控制理論及應(yīng)用重點(diǎn)實(shí)驗(yàn)室, 天津 300384)
0 引言
隨著制造業(yè)的高速發(fā)展,對(duì)鍛造液壓機(jī)的控制性能提出了更高的要求,其控制方法也日趨多樣化[1-4]。王進(jìn)等[5-6]將模糊控制用于電液伺服系統(tǒng)的控制,以提高系統(tǒng)的控制性能。賈超等[7]針對(duì)多缸液壓機(jī)引入控制分配,完成過(guò)驅(qū)動(dòng)系統(tǒng)的分層控制器的設(shè)計(jì),提高了控制性能,增加了控制器的設(shè)計(jì)自由度。陶翠霞等[8]針對(duì)多缸液壓機(jī)提出了一種基于飽和函數(shù)控制律的改進(jìn)型相鄰交叉耦合控制器,減小了抖振,提高了系統(tǒng)的動(dòng)態(tài)響應(yīng)。袁績(jī)海等[9]通過(guò)約束轉(zhuǎn)換方程,將約束系統(tǒng)轉(zhuǎn)換為無(wú)約束系統(tǒng),并設(shè)計(jì)了自適應(yīng)分層滑模控制器,在倒立擺上進(jìn)行仿真,提高了控制效果。秦磊等[10]將液壓管路中的參數(shù)與電路中的變量等效,建立了液壓管路的模擬電路,通過(guò)分析得到各參數(shù)的動(dòng)態(tài)響應(yīng),為液壓實(shí)物的建立提供了可靠的理論依據(jù)。
在多缸液壓系統(tǒng)中會(huì)有各種擾動(dòng)和不確定性,比如負(fù)載的變化,液壓油溫度的變化,油管的長(zhǎng)度對(duì)壓力的影響等,這些都會(huì)導(dǎo)致系統(tǒng)的控制精度減小,這些因素對(duì)于控制系統(tǒng)可以視為集總擾動(dòng),是一個(gè)復(fù)雜的非線性函數(shù)。由于神經(jīng)網(wǎng)絡(luò)具有良好的泛化能力和自適應(yīng)性,可以逼近任何非線性函數(shù),因此在控制系統(tǒng)中被廣泛使用[11-12]。
Lin等[13]針對(duì)一類模鍛液壓機(jī),開(kāi)發(fā)了2種在線更新的預(yù)測(cè)神經(jīng)網(wǎng)絡(luò)和控制神經(jīng)網(wǎng)絡(luò),用于精密鍛造過(guò)程,但由于網(wǎng)絡(luò)數(shù)量的增加,其訓(xùn)練時(shí)間變長(zhǎng),占用更多資源。劉霞勇等[14]針對(duì)液壓系統(tǒng)中的死區(qū)問(wèn)題,利用神經(jīng)網(wǎng)絡(luò)的逼近特性,使用BP神經(jīng)網(wǎng)絡(luò)進(jìn)行補(bǔ)償控制,但使用BP網(wǎng)絡(luò)容易陷入局部極小值。Chen等[15]針對(duì)電液伺服系統(tǒng)中的不確定負(fù)載擾動(dòng),利用遞歸二型模糊小波神經(jīng)網(wǎng)絡(luò)估計(jì)系統(tǒng)的未知?jiǎng)討B(tài)特性,將自適應(yīng)增益滑模與H∞控制結(jié)合以適應(yīng)系統(tǒng)的不確定性,但這種網(wǎng)絡(luò)的學(xué)習(xí)能力較差,響應(yīng)速度慢。楊旭紅等[16]針對(duì)Vienna整流器,提出了將RBF神經(jīng)網(wǎng)絡(luò)與滑模控制結(jié)合的復(fù)合控制器,RBF神經(jīng)網(wǎng)絡(luò)對(duì)非線性系統(tǒng)進(jìn)行自適應(yīng)逼近,在一定程度上增強(qiáng)了系統(tǒng)的抗干擾能力。
受上述文獻(xiàn)啟發(fā),以多缸液壓機(jī)為研究對(duì)象,提出模糊情感神經(jīng)網(wǎng)絡(luò)的反步滑模復(fù)合控制器,模糊情感神經(jīng)網(wǎng)絡(luò)的優(yōu)點(diǎn)在于結(jié)合了RBF神經(jīng)網(wǎng)絡(luò)與模糊神經(jīng)網(wǎng)絡(luò)的優(yōu)點(diǎn),并將這2種神經(jīng)網(wǎng)絡(luò)應(yīng)用到了情感計(jì)算模型上,因此具有更快的響應(yīng)速度與逼近精度。利用提出的模糊情感神經(jīng)網(wǎng)絡(luò)逼近系統(tǒng)的集總擾動(dòng),通過(guò)Lyapunov方法得到神經(jīng)網(wǎng)絡(luò)權(quán)重更新律,最后通過(guò)多缸液壓機(jī)模型進(jìn)行對(duì)比仿真。
1 系統(tǒng)模型
多缸液壓機(jī)如圖1所示,其整體分為2個(gè)部分:滑塊部分和液壓缸。

圖1 多缸液壓機(jī)示意圖
系統(tǒng)是由5個(gè)液壓缸組成,5個(gè)液壓缸通過(guò)比例伺服閥進(jìn)行控制,Fi(i=1,2,3,4,5)是5個(gè)液壓缸的輸出力,FL是鍛件的反抗力,其位置可以是滑塊下端面的任意一點(diǎn),這些力共同作用于滑塊,滑塊的受力分析參考文獻(xiàn)[17]。
根據(jù)牛頓第二定律和剛體轉(zhuǎn)動(dòng)定律可以得到:
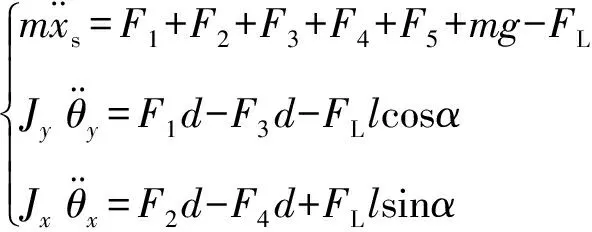
(1)
式中:m為滑塊的質(zhì)量;xs為滑塊中心點(diǎn)的位移;g為重力加速度;Jy為滑塊相對(duì)于y軸的轉(zhuǎn)動(dòng)慣量;θy為滑塊繞y軸的偏轉(zhuǎn)角;d為液壓缸四角作用點(diǎn)到滑塊中心點(diǎn)的距離;l為從負(fù)載力的作用點(diǎn)到滑塊中心點(diǎn)的距離;α為l與x軸的夾角;Jx為滑塊相對(duì)于x軸的轉(zhuǎn)動(dòng)慣量;θx為滑塊繞x軸的偏轉(zhuǎn)角。
通過(guò)液壓缸的流量方程可以得到各個(gè)液壓缸有桿腔和無(wú)桿腔的壓力動(dòng)態(tài)特性方程。
當(dāng)i=1,2,3,4(柱塞缸):
式中:pi1為各柱塞液壓缸進(jìn)油腔的壓強(qiáng);Ey為等效體積彈性模量;Vi1為柱塞液壓缸進(jìn)油腔的容積;Ai1為柱塞液壓缸進(jìn)油腔的活塞面積;Cdi為柱塞液壓缸對(duì)應(yīng)的閥口流量系數(shù);ρ為油液密度;Ps為液壓閥入口壓力;Θi為每個(gè)柱塞液壓缸對(duì)應(yīng)的液壓閥的閥口開(kāi)度。
當(dāng)i=5(活塞缸):
式中:pi1為中心液壓缸進(jìn)油腔的壓強(qiáng);Vi1為中心液壓缸進(jìn)油腔的容積;Ail為中心液壓缸進(jìn)油腔的活塞面積;Cdi為中心液壓缸對(duì)應(yīng)的閥口流量系數(shù);Θi為中心液壓缸對(duì)應(yīng)的液壓閥的閥口開(kāi)度;pi2為中心液壓缸排油腔的壓強(qiáng);Vi2為中心液壓缸排油腔的容積;Ai2為中心液壓缸排油腔的活塞面積。
根據(jù)對(duì)滑塊的分析,各個(gè)液壓缸的實(shí)際位移可以通過(guò)下列等式進(jìn)行計(jì)算:

(4)
式中:x1、x2、x3、x4、x5為各個(gè)液壓缸頂桿的實(shí)際位移。
綜上可以得到滑塊的狀態(tài)表達(dá)式為:
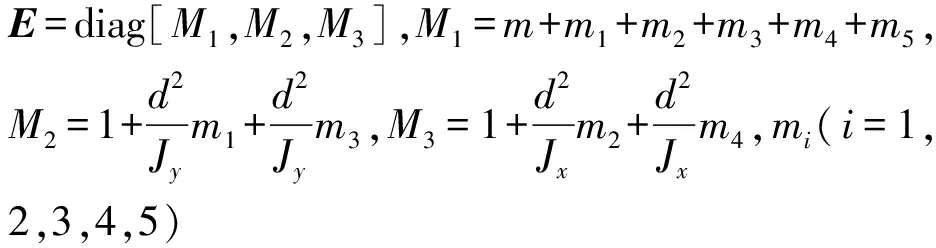
D=[mg,0,0]T。
(6)
其中:
E-1=diag[j11,j22,j33]
E-1G=diag[a11,a22,a33]
則式(6)改寫為:

(7)
式中:v1d,v2d,v3d∈R為虛擬輸入;xs,θy,θx∈R為系統(tǒng)狀態(tài);d1,d2,d3為系統(tǒng)的集總擾動(dòng)。上述公式的參數(shù)的具體含義見(jiàn)文獻(xiàn)[7]。
2 反步滑模控制方法
式(7)可以轉(zhuǎn)換為一般模型:
(8)
式中:x1,x2∈R是系統(tǒng)狀態(tài);v∈R是系統(tǒng)控制輸入;f(x2)和g(x2)是非線性函數(shù);d(t)是非線性擾動(dòng)。
針對(duì)式(8)采用反步滑模控制方法設(shè)計(jì)控制器。
步驟1定義式(8)的狀態(tài)誤差:
e1=x1-x1d
(9)

(10)
式中:x1d為系統(tǒng)的期望位移。
對(duì)式(9)兩邊求導(dǎo)得到:
(11)
則虛擬控制器選擇為:

(12)
式中:k1為正常數(shù)。
選擇Lyapunov函數(shù):

(13)
對(duì)式(13)求導(dǎo)并將式(10)和式(12)代入,可以得到:
(14)
步驟2定義滑模面:
(15)
對(duì)式(15)求導(dǎo)可以得到:

(16)
定義Lyapunov函數(shù):
(17)
對(duì)式(17)兩邊求導(dǎo)并將式(16)代入,得到:
(18)
由于式(18)中的擾動(dòng)d(t)是未知的,所以采用神經(jīng)網(wǎng)絡(luò)去逼近d(t)。
3 基于模糊情感神經(jīng)網(wǎng)絡(luò)的反步滑模控制器
情感神經(jīng)網(wǎng)絡(luò)與常見(jiàn)網(wǎng)絡(luò)的不同之處在于,其是仿照人腦建立的神經(jīng)網(wǎng)絡(luò)模型,與大腦的基本運(yùn)行法則一致,能夠模擬人類的情感,具有響應(yīng)速度快、非線性能力強(qiáng)等特點(diǎn),成為近年來(lái)一個(gè)新的研究熱點(diǎn)。所設(shè)計(jì)的模糊情感神經(jīng)網(wǎng)絡(luò)為:在眶額皮層中引入具有模糊推理能力的模糊神經(jīng)網(wǎng)絡(luò),可以減少對(duì)專家知識(shí)的依賴,在杏仁體中使用單隱層的神經(jīng)網(wǎng)絡(luò),其結(jié)構(gòu)如圖2所示。
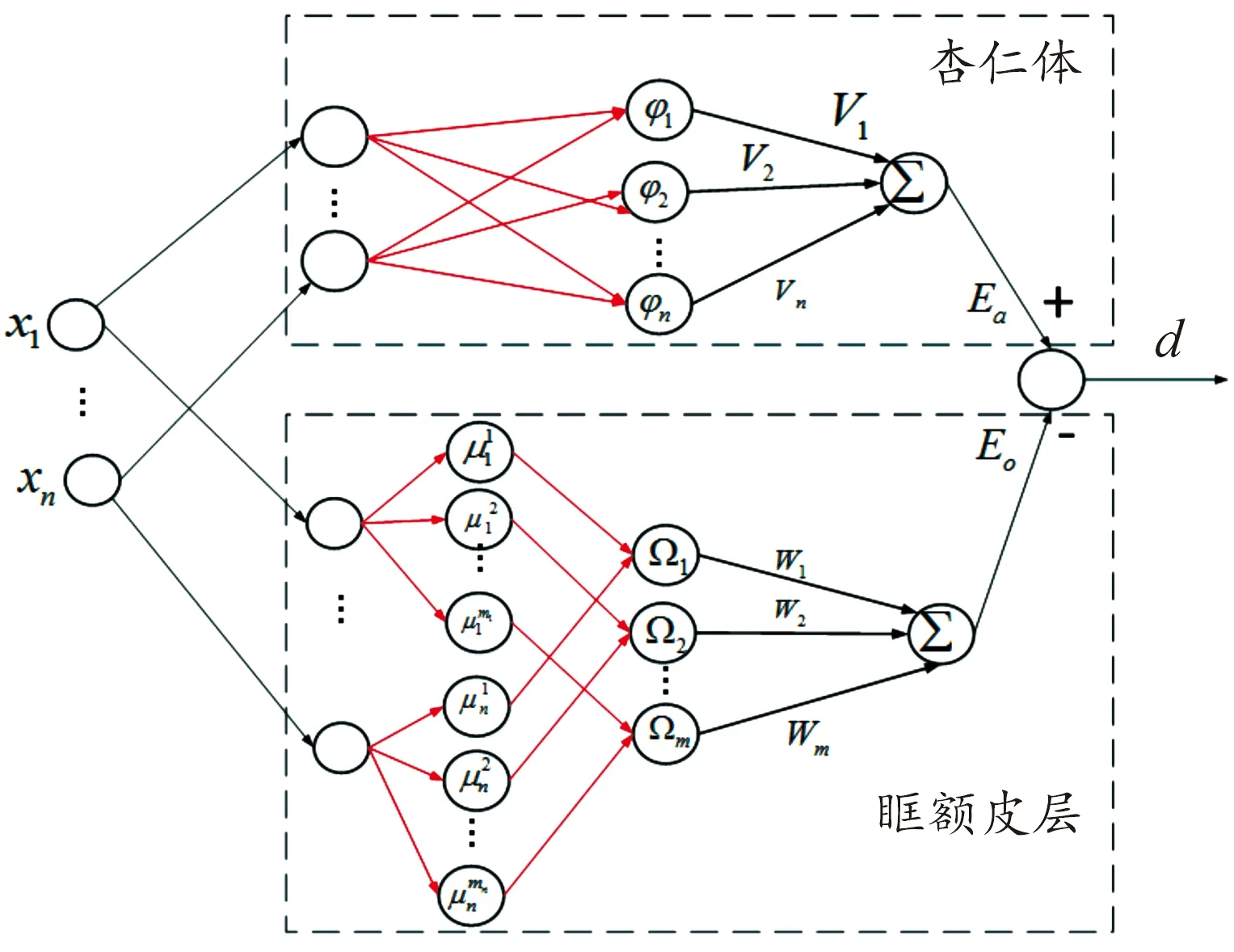
圖2 模糊情感神經(jīng)網(wǎng)絡(luò)結(jié)構(gòu)
這種情感神經(jīng)網(wǎng)絡(luò)與人腦的規(guī)律基本一致,是由眶額皮層和杏仁體2個(gè)部分組成,其中杏仁體的權(quán)重更新規(guī)則呈遞增狀態(tài),眶額皮層權(quán)重更新規(guī)則呈現(xiàn)遞減狀態(tài),其輸出為杏仁體的輸出減去眶額皮層的輸出[18-19]。
在上述模糊情感神經(jīng)網(wǎng)絡(luò)中,杏仁體部分采用RBF網(wǎng)絡(luò)實(shí)現(xiàn),隱含層采用徑向基函數(shù)作為激活函數(shù),其節(jié)點(diǎn)的輸出為:

(19)
式中:xi為神經(jīng)網(wǎng)絡(luò)的輸入;ci為徑向基函數(shù)的中心值;bi為徑向基函數(shù)的寬度。
則杏仁體的輸出為:
Ea=VTφ
(20)
式中:V=[V1,V2,V3,…,Vi]T為杏仁體部分的權(quán)重。
軟件部分主要實(shí)現(xiàn)電壓電流雙環(huán)的穩(wěn)定控制,程序流程圖如圖5所示,雙閉環(huán)PID算法調(diào)節(jié)PWM的輸出,使得電池充電電流和放電電壓恒定,充電模式與放電模式的切換以及電流的步進(jìn)值大小通過(guò)按鍵進(jìn)行設(shè)定。
眶額皮層是由模糊神經(jīng)網(wǎng)絡(luò)組成的,該部分的模糊化函數(shù)通過(guò)高斯激活函數(shù)實(shí)現(xiàn),輸入信號(hào)的節(jié)點(diǎn)的激活函數(shù)可以表示為:
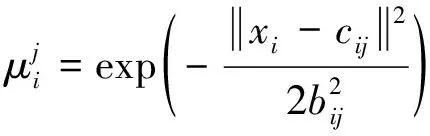
(21)
式中:cij為隸屬度函數(shù)的中心;bij為隸屬度函數(shù)的寬度。
下一步需要對(duì)信號(hào)去模糊化處理,該層節(jié)點(diǎn)的輸出為:
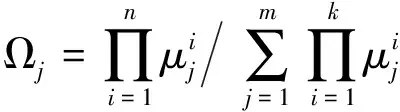
(22)
則眶額皮層的輸出為:
Eo=WTΩ
(23)

則模糊情感神經(jīng)網(wǎng)絡(luò)的輸出為:
d=Ea-Eo
(24)
由于神經(jīng)網(wǎng)絡(luò)具有很強(qiáng)的泛化能力,故采用模糊情感神經(jīng)網(wǎng)絡(luò)來(lái)逼近外部擾動(dòng)d(t),則該網(wǎng)絡(luò)的輸出表示為:

(25)
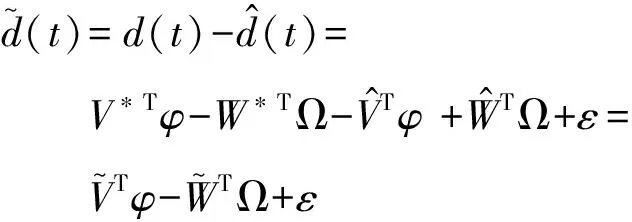
(26)
式中:V*、W*為理想網(wǎng)絡(luò)權(quán)重;ε為網(wǎng)絡(luò)逼近誤差。
(27)

(28)
式中:λ1、λ2均為正常數(shù)。
因此,所設(shè)計(jì)的復(fù)合控制器為:
(29)

定理1對(duì)于具有外部擾動(dòng)的系統(tǒng),采用式(15)及式(27)—式(29),可以使得閉環(huán)系統(tǒng)一致,最終有界。
證明:選取Lyapunov函數(shù)使其包含滑模面和神經(jīng)網(wǎng)絡(luò)的權(quán)重更新誤差:

(30)
對(duì)式(30)兩邊求導(dǎo)可以得到:

(31)
將式(18)、式(26)、式(29)代入式(31),可以得到:
(32)
根據(jù)神經(jīng)網(wǎng)絡(luò)的權(quán)重更新律,即式(27)和式(28),則式(32)可以寫為:
(33)

(34)
取:
由于:

(35)
取k4>χ則

(36)
由于:
通過(guò)取k1、k2、k3的值可使|Q|>0,從而保證Q為正定矩陣,使得式(36)成立。
根據(jù)Lyapunov定理,當(dāng)t→0時(shí)s收斂到零,定理1被證明。
4 仿真實(shí)例
為了驗(yàn)證所提算法的有效性和優(yōu)越性,采用第一節(jié)介紹的多缸液壓機(jī)進(jìn)行跟蹤和調(diào)平仿真驗(yàn)證,并與反步滑模和文獻(xiàn)[7]所提算法進(jìn)行對(duì)比。
根據(jù)式(29)可以得到多缸液壓機(jī)模型虛擬層(式(7))的控制器表達(dá)式為:

其中:
e11=xs-xsd,e21=θy-θyd,e31=θx-θxd
s2=k22e21+e22,s3=k33e31+e32
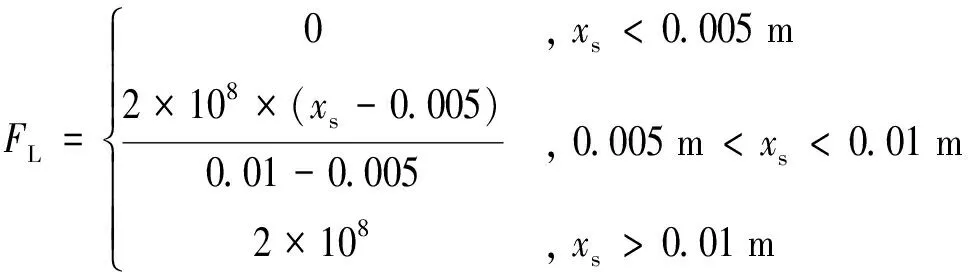
多缸液壓機(jī)的控制目標(biāo)為:xsd是滑塊中心的下行期望位移,其斜率為1×10-2,且在滑塊下行過(guò)程中應(yīng)保持滑塊始終處于調(diào)平狀態(tài),即滑塊的期望角度為:θyd=0,θxd=0。鍛件的反抗力的作用點(diǎn)在滑塊下端面l=0.2 m,α=2π/3的位置上,其在控制系統(tǒng)中視為外部擾動(dòng)。反抗力的大小如圖3所示。
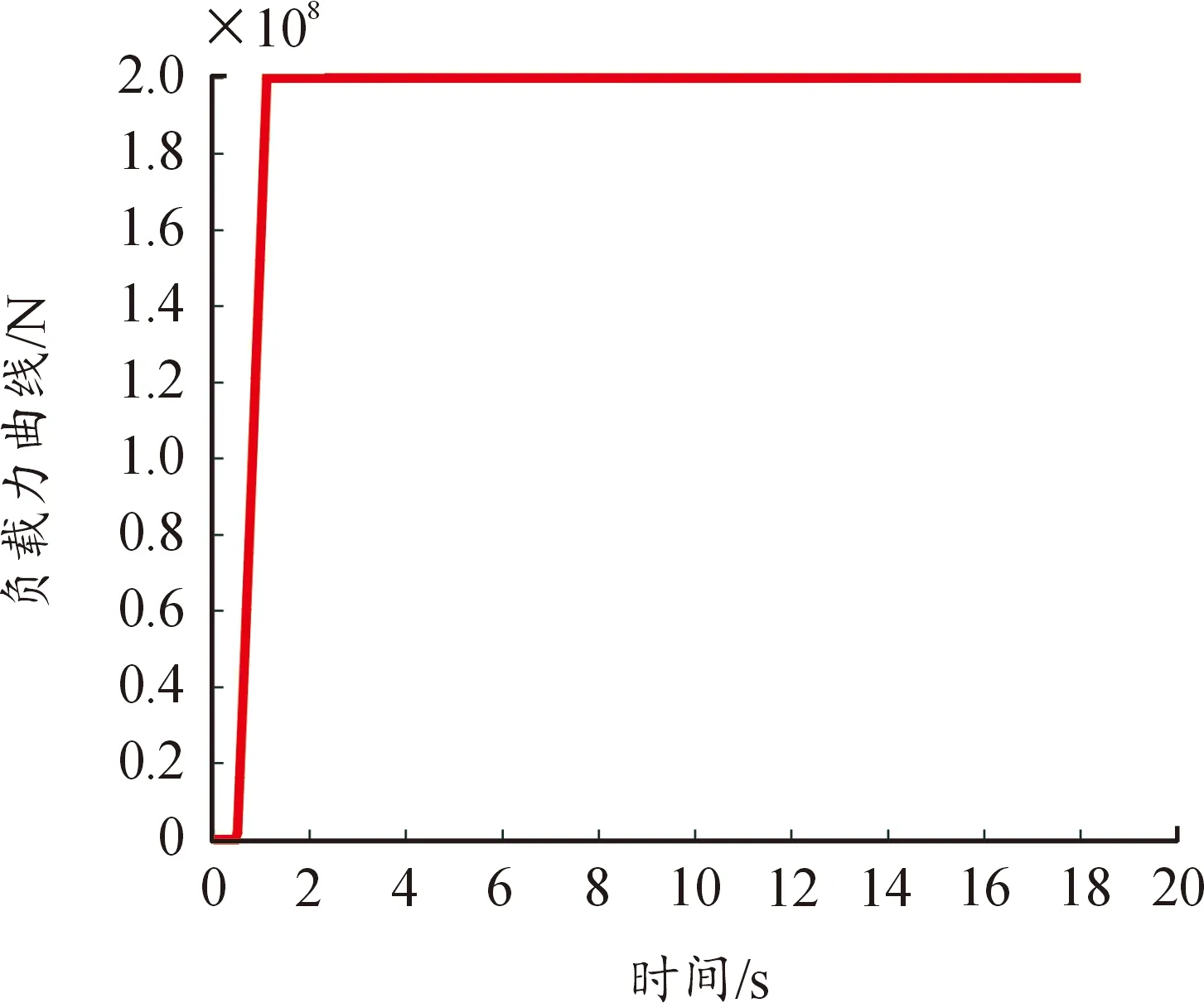
圖3 反抗力曲線
反抗力的劃分具體表示為:
所設(shè)計(jì)的控制器和神經(jīng)網(wǎng)絡(luò)權(quán)重更新律的參數(shù)如表1所示,仿真對(duì)比結(jié)果如圖4所示。從圖4中可以看出3種方法都可以實(shí)現(xiàn)滑塊中心位移的穩(wěn)定跟蹤。

表1 控制器參數(shù)
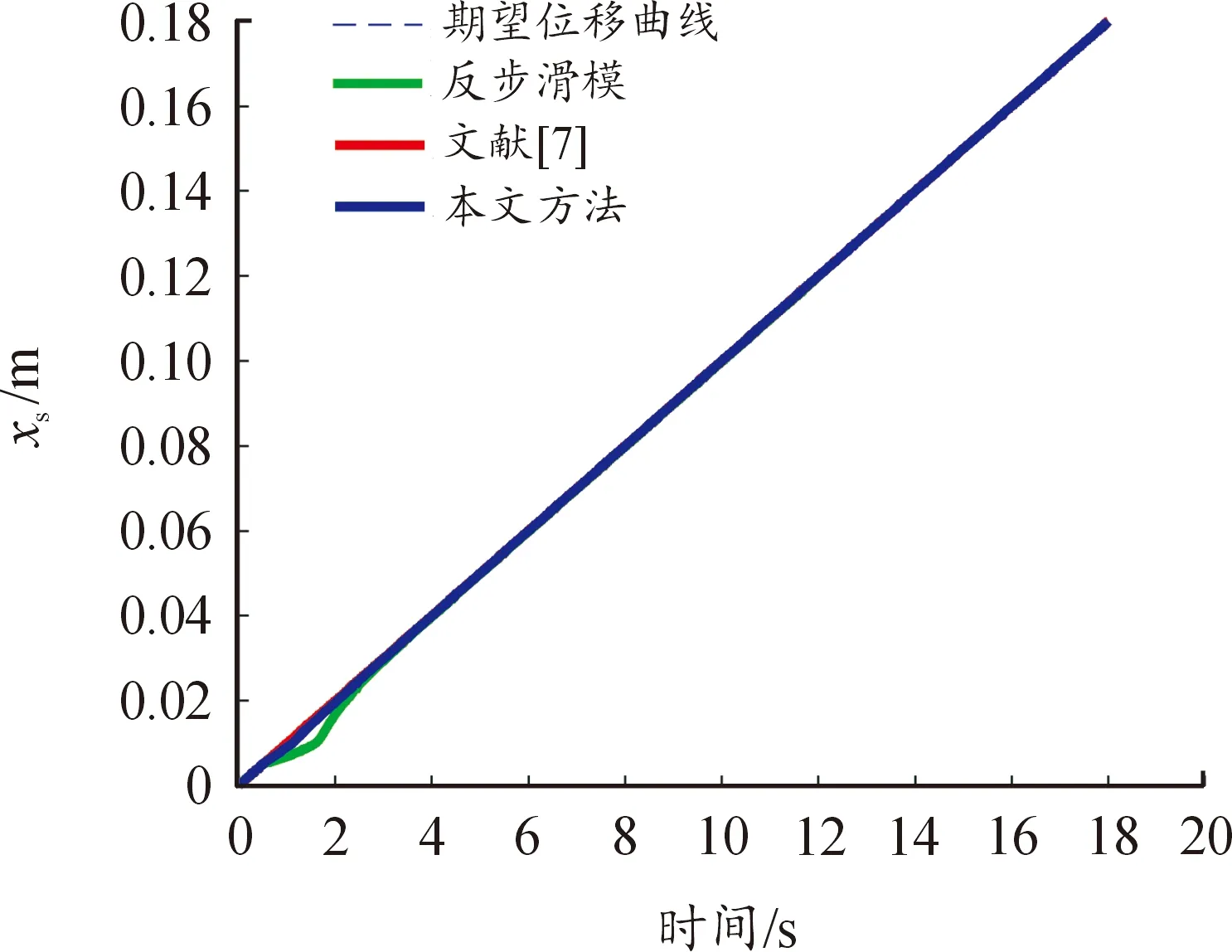
圖4 滑塊中心位移的跟蹤曲線
圖5和圖6是多缸液壓機(jī)滑塊的調(diào)平曲線,所提復(fù)合控制器的超調(diào)量更小且在受到較大的外部擾動(dòng)時(shí)的收斂速度更快,魯棒性更強(qiáng),在同樣的控制精度下,所提出的復(fù)合控制器下的調(diào)節(jié)時(shí)間更短。圖7是對(duì)角缸1、2、3、4的調(diào)平誤差曲線,可以看出3種方法都可以保證調(diào)平狀態(tài)的誤差收斂到零,且所提出的復(fù)合控制器的調(diào)平誤差更小,具體的對(duì)比詳見(jiàn)表2。

圖5 滑塊繞y軸的偏轉(zhuǎn)角度曲線
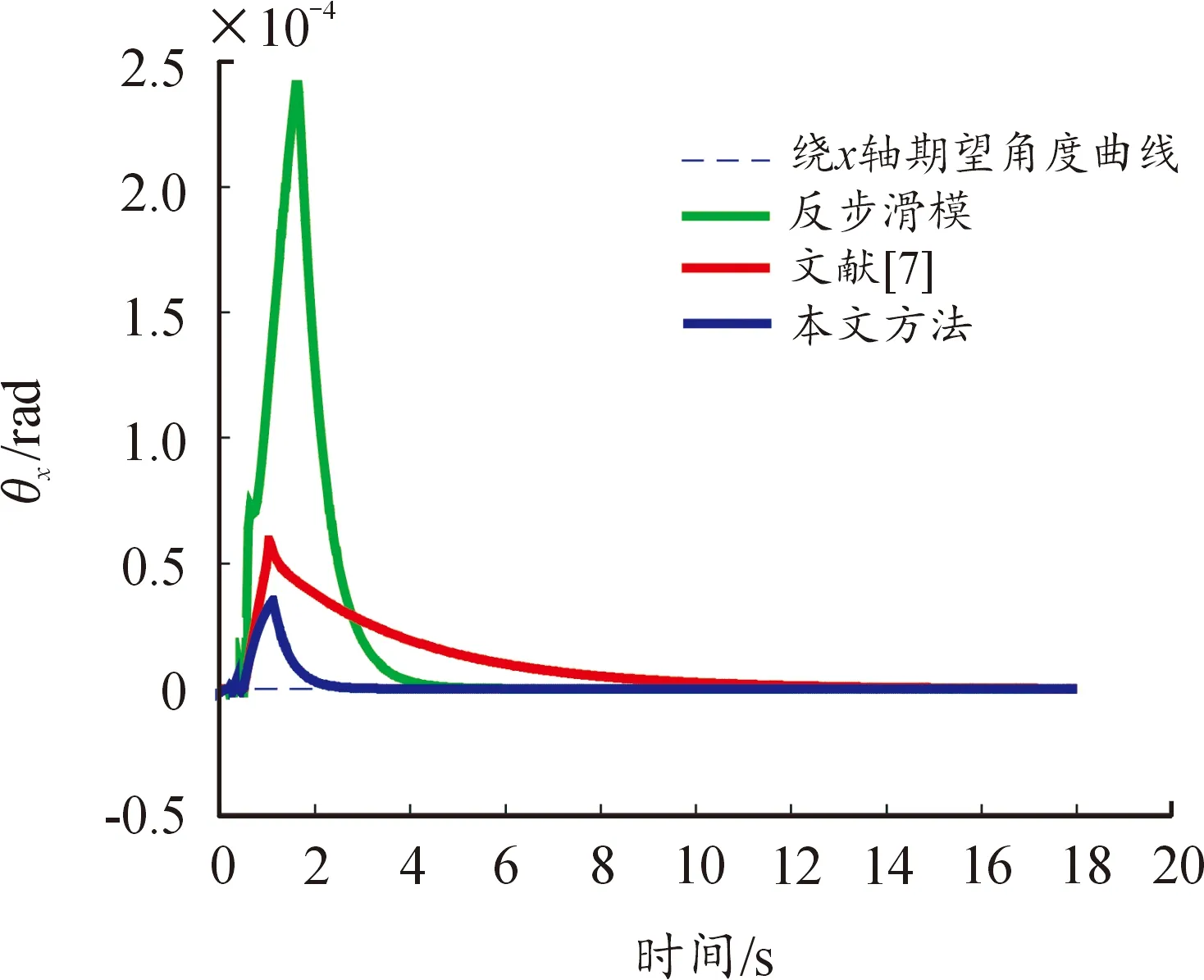
圖6 滑塊繞x軸的偏轉(zhuǎn)角度曲線
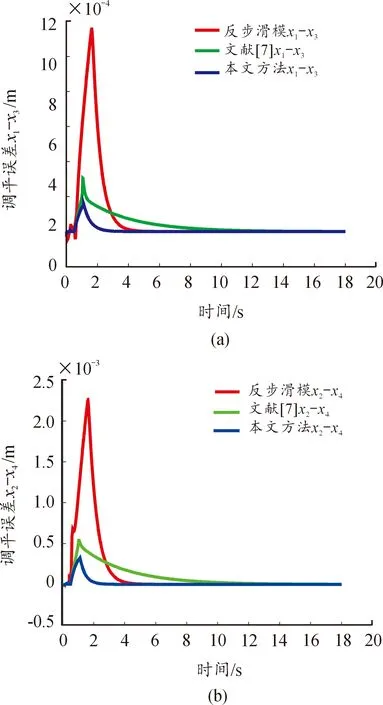
圖7 對(duì)角缸的調(diào)平誤差曲線
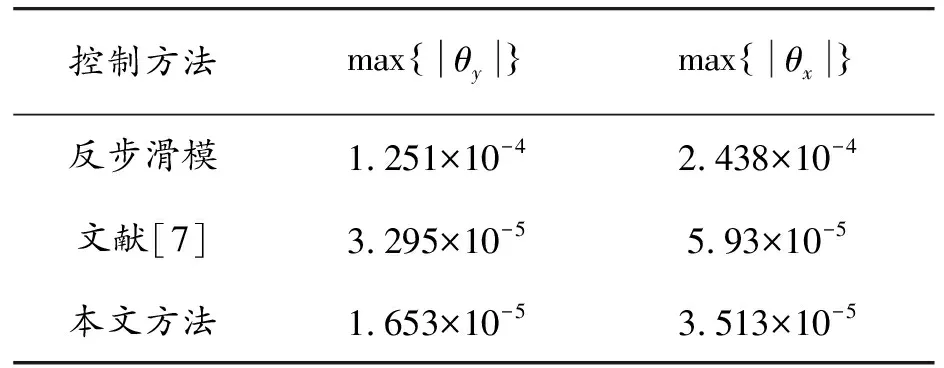
表2 3種控制方法的結(jié)果
圖8是虛擬控制器的輸入曲線,可以看出在受到突變大負(fù)載時(shí)其輸入仍然是穩(wěn)定的。圖9是模糊情感神經(jīng)網(wǎng)絡(luò)逼近擾動(dòng)的估計(jì)曲線,可以看出當(dāng)反抗力發(fā)生突然變化時(shí)仍然對(duì)時(shí)變的集總擾動(dòng)有良好的快速逼近能力,從而提高控制性能。

圖8 虛擬控制輸入曲線

圖9 系統(tǒng)集總擾動(dòng)的估計(jì)曲線
式(29)所設(shè)計(jì)的控制器是針對(duì)多缸液壓機(jī)的虛擬系統(tǒng)(式7)進(jìn)行的設(shè)計(jì),在控制分配采用有效集的方式,在執(zhí)行層采用分散滑模控制,其設(shè)計(jì)過(guò)程參考文獻(xiàn)[7]。在控制分配方法下各個(gè)缸的出力結(jié)果如圖10所示。

圖10 5個(gè)缸的輸出力曲線
圖11是各個(gè)缸的閥口開(kāi)度曲線。通過(guò)圖10和圖11可以看出,在控制分配方法下,即使在反抗力突變的情況下各缸出力仍平穩(wěn)變化,且閥口開(kāi)度的變化符合實(shí)際情況。
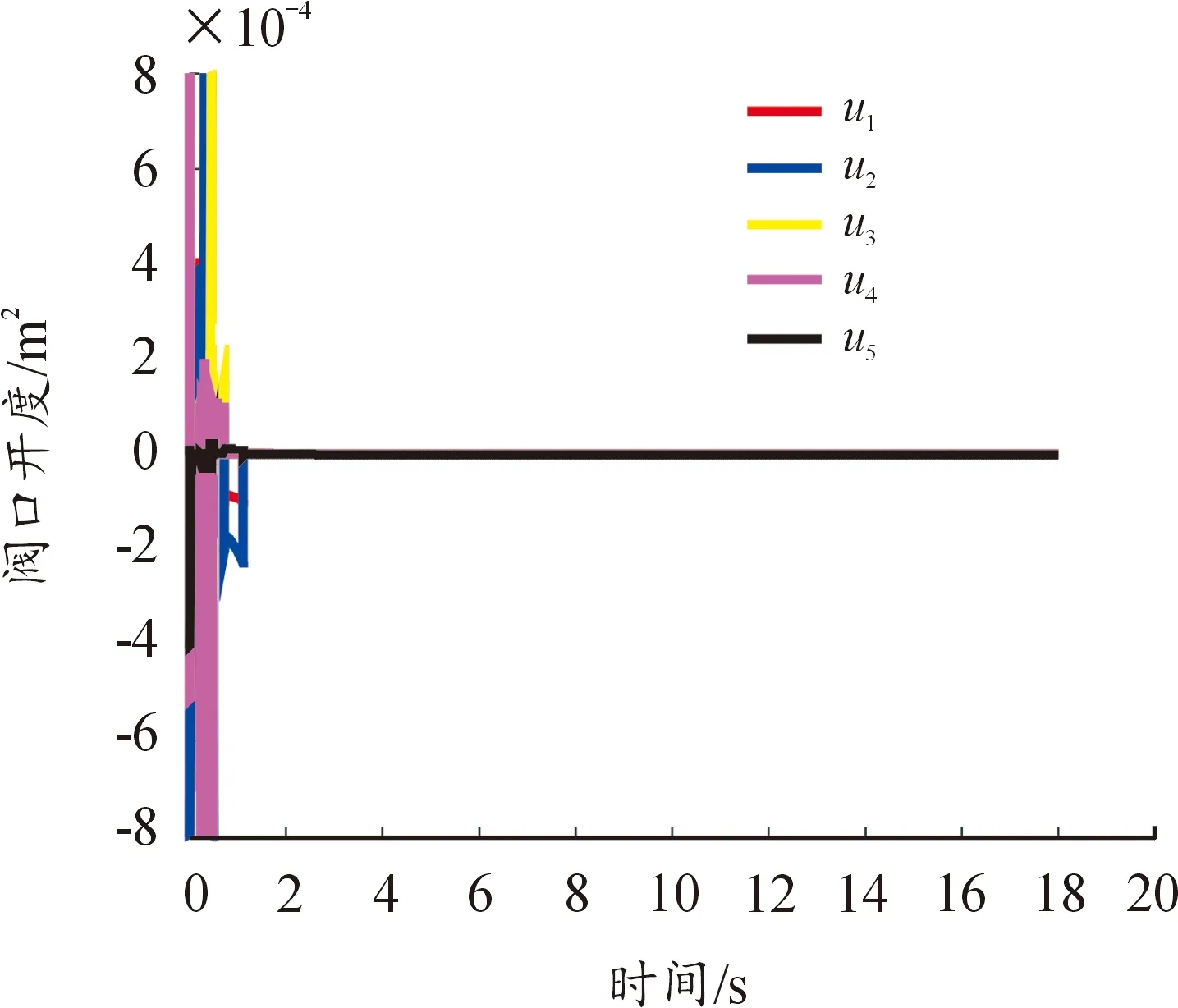
圖11 各個(gè)液壓缸的閥口開(kāi)度曲線
5 結(jié)論
針對(duì)具有外部擾動(dòng)的二階非線性系統(tǒng),提出基于模糊情感神經(jīng)網(wǎng)絡(luò)的反步滑模復(fù)合控制器,提出的神經(jīng)網(wǎng)絡(luò)結(jié)構(gòu)用于未知擾動(dòng)的逼近,通過(guò)Lyapunov方法得到神經(jīng)網(wǎng)絡(luò)權(quán)重的更新律,保證了整個(gè)閉環(huán)系統(tǒng)的穩(wěn)定。在多缸液壓機(jī)上的仿真結(jié)果表明,所提出的組合控制器有良好的位置跟蹤與調(diào)平能力和較強(qiáng)的魯棒性,但僅是針對(duì)虛擬層進(jìn)行的控制器設(shè)計(jì)。下一步是在所設(shè)計(jì)的虛擬層的控制器的基礎(chǔ)上進(jìn)行分配層控制器的設(shè)計(jì),并考慮執(zhí)行器故障,采用動(dòng)態(tài)控制分配方法進(jìn)行分配層控制器的設(shè)計(jì)。
猜你喜歡
工業(yè)設(shè)計(jì)(2022年8期)2022-09-09 07:43:20
軍民兩用技術(shù)與產(chǎn)品(2021年10期)2021-03-16 06:05:30
中國(guó)生殖健康(2020年5期)2021-01-18 02:59:48
北京測(cè)繪(2020年12期)2020-12-29 01:33:58
家庭醫(yī)學(xué)(下半月)(2020年4期)2020-05-30 12:42:50
北極光(2019年12期)2020-01-18 06:22:10
裝備制造技術(shù)(2019年12期)2019-12-25 03:06:46
小太陽(yáng)畫報(bào)(2019年10期)2019-11-04 02:57:59
中國(guó)洗滌用品工業(yè)(2019年4期)2019-05-11 09:27:34
中國(guó)生殖健康(2018年5期)2018-11-06 07:15:40