一種面向養(yǎng)殖工船艙壁清洗水下機器人
2023-09-15 00:36:30王云杰林禮群馬鳳爽徐志強高迪駒
船電技術(shù) 2023年9期
關(guān)鍵詞:控制策略
王云杰,林禮群,馬鳳爽,徐志強,高迪駒
應(yīng)用研究
一種面向養(yǎng)殖工船艙壁清洗水下機器人
王云杰1,2,林禮群1,2,馬鳳爽1,2,徐志強1,2,高迪駒3
(1. 中國水產(chǎn)科學(xué)研究院漁業(yè)機械儀器研究所,上海 200092;2. 農(nóng)業(yè)農(nóng)村部遠(yuǎn)洋漁船與裝備重點實驗室,上海 200092;3. 上海海事大學(xué),上海 201306)
養(yǎng)殖工船艙壁清洗水下機器人是養(yǎng)殖作業(yè)的重要關(guān)鍵設(shè)備之一。針對深遠(yuǎn)海養(yǎng)殖工船的實際需求,研究了一種養(yǎng)殖艙壁清洗水下機器人。分析了水下機器人的艙壁靜力學(xué)原理和艙壁運動動力學(xué)原理,建立了運動坐標(biāo)系,并提出了一種基于模型預(yù)測控制的路徑跟蹤策略。最后,分別通過對水下機器人自由控制和跟蹤控制實驗驗證了的控制策略。實驗結(jié)果表面,該方法能夠獲得良好的控制效果。該水下機器人的研究方法可為養(yǎng)殖工船清洗作業(yè)提供一種有效的解決方案。
養(yǎng)殖工船 艙壁清洗 水下機器人 模型預(yù)測控制
0 引言
由于我國深遠(yuǎn)海平臺養(yǎng)殖起步較晚,系統(tǒng)性養(yǎng)殖工藝與支撐設(shè)備的關(guān)鍵環(huán)節(jié)、關(guān)鍵技術(shù)仍然存在不少問題[1,2]。其中,養(yǎng)殖工船艙壁面附著的海生物與養(yǎng)殖污物去除是工船養(yǎng)殖作業(yè)的重要環(huán)節(jié)之一。養(yǎng)殖艙環(huán)境因長時間受海水、剩余餌料及魚類排泄物作用,容易繁衍滋生藻類、貝類等附著物,造成魚類的生存環(huán)境惡化、寄生蟲滋生,使養(yǎng)殖產(chǎn)品死亡率增加,因此需采用艙壁清潔系統(tǒng)定期清潔艙壁,保證良好的艙養(yǎng)環(huán)境。
盡管使用水下機器人用于清潔養(yǎng)殖艙壁,但目前這類機器人存在以下亟待解決難題:一是現(xiàn)有市場上比較成熟的水下清洗設(shè)備主要是針對深度10米以下的游泳池開發(fā)應(yīng)用,滿足不了大深度、耐海水腐蝕及堅硬附著海生物的清洗去除要求[3]。二是針對船體表面清洗類的設(shè)備主要是水上作業(yè),或水下半自動化作業(yè)。由于船體表面附著物堅硬、厚度大,所以大多采用高壓水噴射裝置清洗,容易去除表面防銹材料,清洗設(shè)備成本高,且與養(yǎng)殖艙壁面水下清洗條件不相適應(yīng)[4,5]。三是現(xiàn)有水下清洗自動化設(shè)備都采用推進(jìn)器形式吸附表面,推進(jìn)器產(chǎn)生的水流擾動對養(yǎng)殖魚群影響很大[6]。
為此,根據(jù)深遠(yuǎn)海養(yǎng)殖工船的實際需求,研究一種養(yǎng)殖艙壁清洗水下機器人。首先,提出該水下機器人的設(shè)計方案,并對其進(jìn)行力學(xué)分析。接著,研究水下機器人的控制系統(tǒng),提出一種基于模型預(yù)測的控制策略。最后,通過仿真實驗驗證該控制策略的有效性。
1 水下機器人設(shè)計
1.1 需求分析
深遠(yuǎn)海養(yǎng)殖工船場景中,以某海洋養(yǎng)殖工船中較有代表性的艙體為例,如圖1所示。單個艙體的尺寸約為22.5 m×19.5 m×14.5 m,該艙體待清洗表面積約1600 m2,其中,邊切角約為135°。艙體材質(zhì)為鋼材材質(zhì),規(guī)格為12 mm厚鋼板。
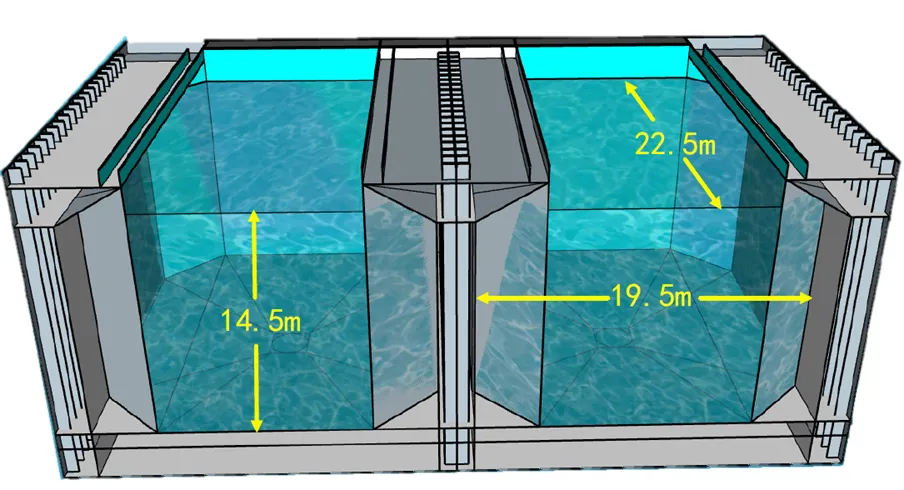
圖1 某海洋養(yǎng)殖工船艙體示意圖
因此,對水下機器人的具體功能需求包括:能穩(wěn)定吸附在垂直艙壁和底部艙壁5個壁面;清潔過程不傷害艙體壁面油漆;按規(guī)劃路徑自動清洗各壁面,實現(xiàn)較好的清潔效果;有故障報警功能,且緊急情況下自動斷電保護(hù);可在岸基設(shè)備觀測機器人狀態(tài)。
1.2 水下機器人設(shè)計方案
根據(jù)上述需求,設(shè)計一種養(yǎng)殖艙壁清洗水下機器人,如圖2所示,以解決深遠(yuǎn)海養(yǎng)殖工船艙壁清洗問題。該養(yǎng)殖艙壁清洗水下機器人由機器人主體模塊、清洗模塊、視覺感知模塊和運動控制模塊四大部分組成。
機器人主體模塊主要由機器人箱體(尺寸約為1米×1米)、支撐輪組成。在機器人箱體一端的左右兩側(cè)各安裝一個主動支撐輪,在其另一端的中間位置處安裝一個從動支撐輪,由三個輪支撐機器人的平衡。主動支撐輪具有驅(qū)動功能,而從動支撐輪僅做平衡支撐作用。此外,這三個支撐輪還有具有磁力吸附作用,使得機器人能夠在艙體壁的任何地方行走。水下機器人主體依靠兩組主動支撐輪進(jìn)行驅(qū)動,同時,利用速度差實現(xiàn)轉(zhuǎn)向。
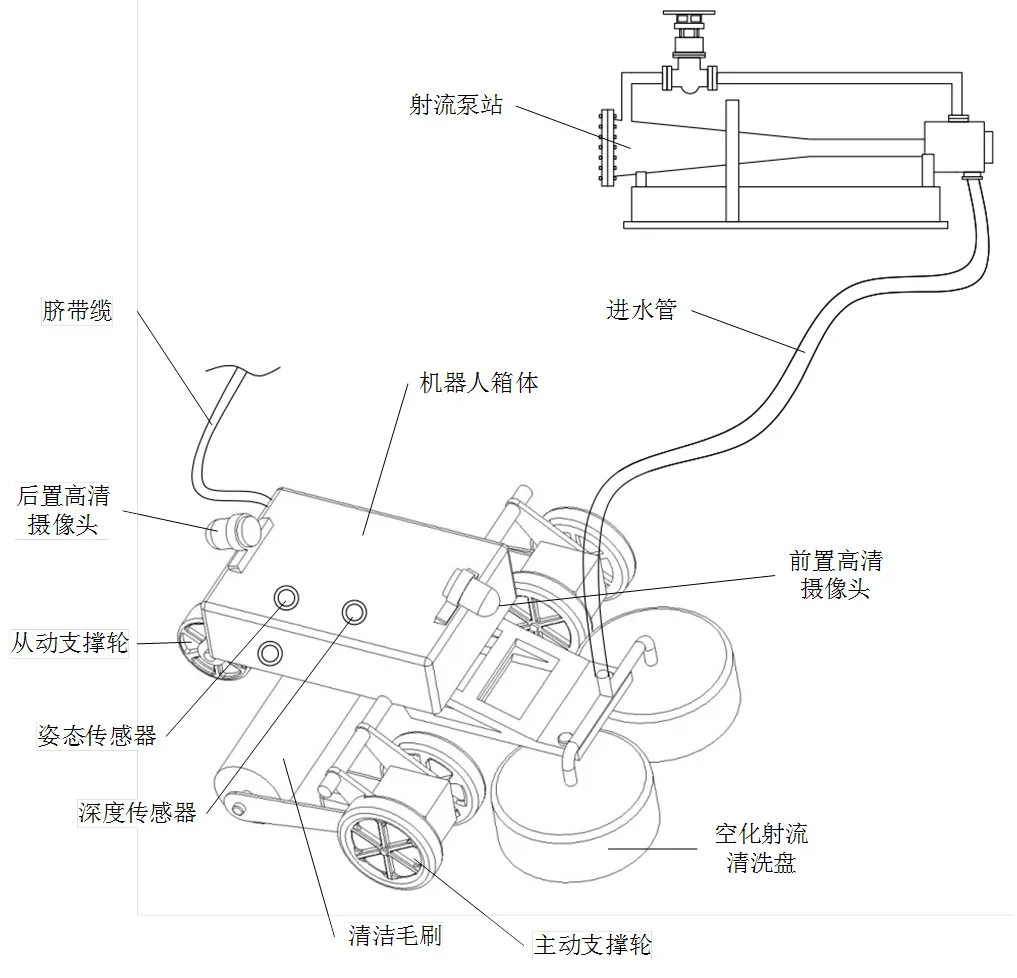
圖2 養(yǎng)殖艙壁清洗水下機器人示意圖
清洗模塊由空化射流清洗盤、清潔毛刷組成。在主動磁力吸附輪的一側(cè)安裝空化射流清洗盤,基于高壓水空化射流技術(shù)對艙壁進(jìn)行清洗,其中,空化射流清洗盤通過進(jìn)水管與射流泵站相連,射流泵站通過控制信號與工控機相連接。在清洗盤清洗后,再通過清潔毛刷的實現(xiàn)二次清洗。
視覺感知模塊主要由安裝在機器人箱體前后端的兩個高清攝像頭和頂部姿態(tài)傳感器、深度傳感器組成。利用兩個高清攝像頭采集大量清洗前后的圖像數(shù)據(jù),使用圖像識別和機器學(xué)習(xí)算法訓(xùn)練清洗前后清潔度特征,構(gòu)建清潔度識別模型,用以判斷清潔區(qū)域是否達(dá)到清潔要求,將識別結(jié)果輸入給機器人運動控制邏輯,實現(xiàn)機器人自動清潔功能。利用機器人安裝的臍帶纜在運動過程中的長度變化,絞盤主被動收放纜觸發(fā)信號,同時,融合深度傳感器和姿態(tài)傳感器可實現(xiàn)機器人的定位控制。
運動控制模塊由嵌入式控制器、信號采集模塊、圖像處理模塊和電源模塊組成。利用控制算法實現(xiàn)水下機器人的運動控制。
1.3 機器人整體力學(xué)分析
1.3.1 艙壁靜力學(xué)分析
水下機器人利用磁力吸附技術(shù)將機器人橡膠輪子吸附在艙壁上,其受力情況如圖3所示。
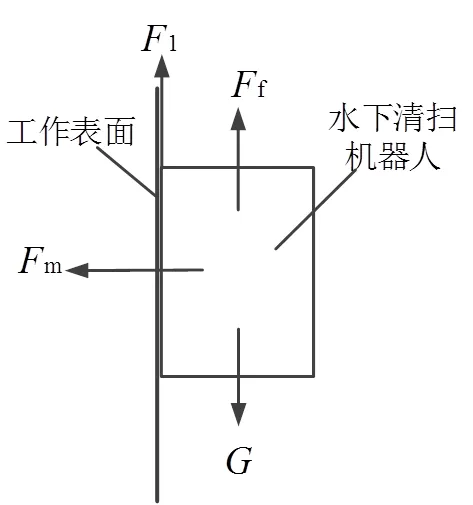
圖3 水下機器人受力分析
如要使得水中的機器人能夠靜止吸附在艙壁上,應(yīng)滿足如下條件:

1.3.2 艙壁靜力學(xué)分析
為了實現(xiàn)艙壁清潔工作,水下機器人不僅需要穩(wěn)固地吸附在工作表面,而且還需要在穩(wěn)固吸附的基礎(chǔ)之上能夠正常地向各個方向運動。為此,在滿足靜止吸附條件之外還應(yīng)該滿足相應(yīng)的驅(qū)動條件:
其中:為驅(qū)動電機輸出的驅(qū)動力。
結(jié)合爬壁機器人壁面運動動力學(xué)原理[8],機器人在艙壁運動的動力學(xué)方程可表示為:

其中,為機器人輪子的軸速度;為輪子質(zhì)量;驅(qū)動力矩;為轉(zhuǎn)動慣性矩。
2 控制系統(tǒng)
2.1 機器人運動學(xué)模型[9]
為了研究水下機器人的運動特性,首先建立描述水下機器人運動的坐標(biāo)系系統(tǒng),包括慣性坐標(biāo)系與載體坐標(biāo)系。慣性坐標(biāo)E-x0y0z0,原點E取水域中一固定點為原點;載體坐標(biāo)系o?xyz,以水下機器人重心o為原點,并隨水下機器人一起運動,如圖4 所示。
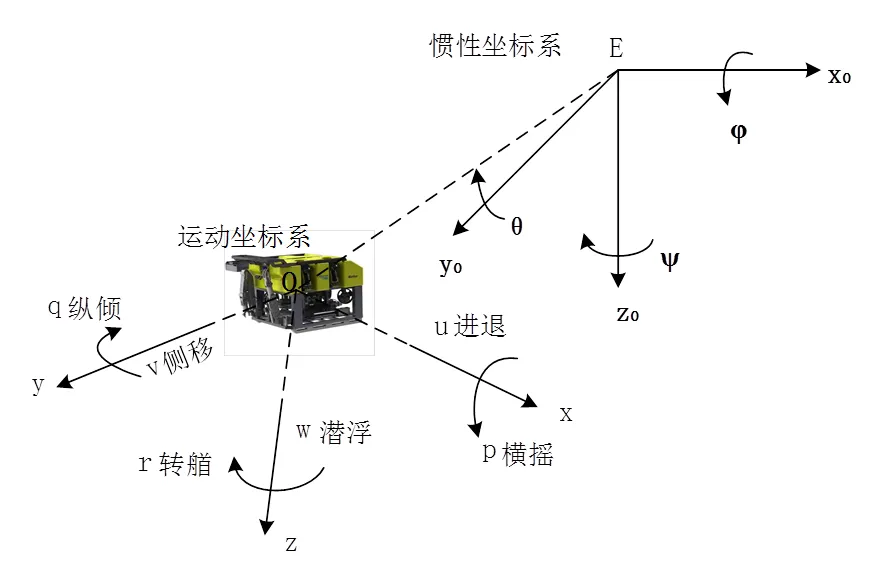
圖4 水下機器人運動坐標(biāo)系
考慮到計算的方便性,在分析水下機器人運動時引入載體坐標(biāo)系。載體坐標(biāo)系是以水下機器人的剛體為基準(zhǔn)建立的坐標(biāo)系。由于轉(zhuǎn)動慣量和慣性積是與水下機器人的形狀、密度分布以及質(zhì)量有關(guān)的物理量,因此在該坐標(biāo)系中,水下機器人的轉(zhuǎn)動慣量和慣性積都是常數(shù),同時受到的推力大小和方向也不會隨著水下機器人運動的變化而改變。水下機器人在慣性坐標(biāo)系中的位姿分別可以用位置坐標(biāo)(0,0,0)和姿態(tài)角()來表示,分別為橫搖角、縱傾角和艏向角;水下機器人在載體坐標(biāo)系中的線速度和角速度分別為()和() 。水下機器人在六自由度下的運動學(xué)轉(zhuǎn)換方程為[10]:
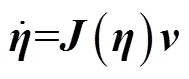
由于水下機器人貼壁工作,不必考慮全部6個自由度的運動,只考慮進(jìn)退()、橫移()和轉(zhuǎn)艏()三自由度。對應(yīng)的運動學(xué)方程可以進(jìn)行簡化。這里對水下機器人進(jìn)行路徑跟蹤進(jìn)行研究,因此,慣性坐標(biāo)系下水下機器人的位置及角度量變量和載體坐標(biāo)系下水下機器人的線速度與角速度變量之間的關(guān)系可表示為:
且當(dāng)時間趨向于無窮時,水下機器人的位姿誤差趨于零。即有:

2.2 基于模型預(yù)測的跟蹤控制策略
模型預(yù)測控制(Model Predictive Control,MPC)是一種先進(jìn)的過程控制,它使用一組約束來調(diào)節(jié)過程,并預(yù)測系統(tǒng)未來的行為。在實際的水下動態(tài)目標(biāo)跟蹤過程中,由于水下機器人動力系統(tǒng)對于控制量跳變要求比較嚴(yán)格,因此本文將控制增量作為目標(biāo)函數(shù)的狀態(tài)量,所構(gòu)建的優(yōu)化目標(biāo)函數(shù)為:

其中,N為預(yù)測時域,N為控制時域。式(10)中,第一項反映了水下機器人對于動態(tài)目標(biāo)的跟蹤能力;第二項反映了對控制量平穩(wěn)變化的要求,和是權(quán)重矩陣。基于MPC水下機器人軌跡跟蹤策略原理框圖如圖5所示。
圖5 基于MPC水下機器人軌跡跟蹤策略原理框圖
3 實驗與分析
為了進(jìn)一步研究面向養(yǎng)殖工船艙壁清洗水下機器人的功能,分別采用自由控制和跟蹤控制的兩種方式進(jìn)行驗證。
1)自由控制
自由控制是一種開環(huán)控制,僅僅簡單地響應(yīng)輸入信號。控制水下機器人在養(yǎng)殖工船艙底移動,從A點出發(fā),仿真速度控制在0.5 m/s,產(chǎn)生仿真結(jié)果如圖6所示,該仿真結(jié)果顯示了水下機器人在沒有設(shè)定方向情況下的非線性運動,也表明了水下機器人可以實現(xiàn)自由移動。
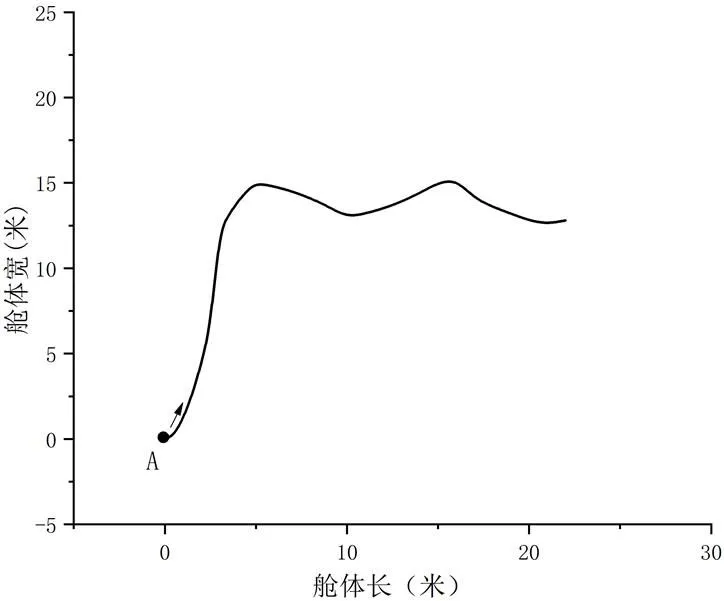
圖6 開環(huán)控制時水下機器人運動軌跡
2)基于MPC的軌跡跟蹤控制
本研究利用Matlab/Simulink搭建了基于MPC的跟蹤控制仿真系統(tǒng),基于MPC的軌跡跟蹤控制是一種閉環(huán)控制。其中,采樣時間為0.1 s,控制時域和預(yù)測時域均設(shè)置為10個時間步長。優(yōu)化器根據(jù)MPC控制器對未來計劃輸出的預(yù)測,找到驅(qū)動預(yù)測計劃輸出盡可能接近設(shè)定點的理想控制輸入序列。另外,根據(jù)文獻(xiàn)[11]加入了基于PID的軌跡跟蹤方法進(jìn)行對比。兩種跟蹤控制方法充分考慮了水下機器人的自身尺寸、慣性,同時忽略水流、水溫等環(huán)境因素的影響。實驗結(jié)果如圖7所示。
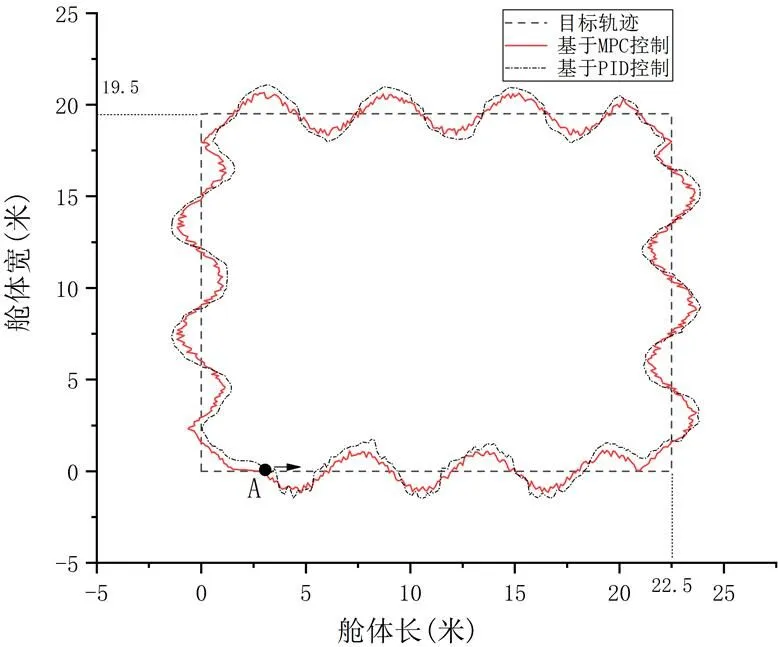
圖7 基于MPC的水下機器人運動軌跡
在圖7中,灰色虛線是圍繞養(yǎng)殖工船艙壁的一條設(shè)定軌跡,目標(biāo)是期望水下機器人沿著該目標(biāo)軌跡運動。仿真實驗從A點開始,根據(jù)實驗數(shù)據(jù)獲得水下機器人的行動軌跡(紅實線是基于MPC跟蹤控制的結(jié)果,點劃線是基于PID跟蹤控制的結(jié)果)。從圖7中,可以看出在兩種控制方法基本上都能夠?qū)崿F(xiàn)在矩形的艙體內(nèi)根據(jù)設(shè)定軌跡進(jìn)行跟蹤控制。但基于MPC跟蹤最大偏移量是1.65 m,基于PID跟蹤最大偏移量是1.79 m,相比之下,前者控制效果相對較好。此外,基于MPC跟蹤軌跡的平滑性較基于PID差一些,這說明MPC的滾動優(yōu)化在起一定作用,使系統(tǒng)進(jìn)行頻繁調(diào)節(jié)。
4 結(jié)語
1)本文研究了一種養(yǎng)殖工船艙壁清洗的水下機器人,根據(jù)實際需求提出了水下機器人設(shè)計方案。分析了水下機器人的艙壁靜力學(xué)原理和艙壁運動動力學(xué)原理,并建立了運動坐標(biāo)系。基于機器人動力學(xué)模型,提出了一種基于模型預(yù)測控制的路徑跟蹤方法。最后分別通過實驗驗證了機器人的控制策略。該水下機器人的研究方法可為養(yǎng)殖工船清洗工作提供一種有效的解決方案。
2)關(guān)鍵技術(shù)討論
針對養(yǎng)殖工船艙壁清洗功能的水下機器人關(guān)鍵技術(shù)包括:持續(xù)供電和水下通信技術(shù)、定位與導(dǎo)航技術(shù)、清潔控制技術(shù)、機器人控制策略等。
(1)持續(xù)供電與水下通信技術(shù):自主移動水下機器人應(yīng)配備足夠且可靠的電源,以保證水下機器人工作時間和清洗效率。同時,還需要具備可靠的水下通信系統(tǒng),以便于與地面操作員進(jìn)行實時通訊和數(shù)據(jù)傳輸。通常可用單獨的電纜連接所有傳感器和驅(qū)動器。
(2)定位與導(dǎo)航技術(shù):在水下復(fù)雜環(huán)境中定位機器人并找到其路徑是一項極為重要的任務(wù),當(dāng)前僅使用相機通過圖像識別無法進(jìn)行有效導(dǎo)航。
(3)清洗程度控制技術(shù):基于清洗刷技術(shù)是水下清潔表面過程中使用最多的技術(shù),與其他技術(shù)相比,其效率較高(200 m2/h至1000 m2/h),但它當(dāng)不規(guī)則表面時,無法去除所有表面的生物污垢。
(4)機器人控制策略:水下機器人的控制系統(tǒng)要支持水下遙控和自主導(dǎo)航功能,并且需要保證其穩(wěn)定性和安全性,以防止機器人在操作過程中意外受損或迷失方向。最常見的控制策略為根據(jù)清洗任務(wù)需要進(jìn)行路徑規(guī)劃的跟蹤控制策略。
[1] 張成林, 徐皓, 王世明, 等. 基于大型漁業(yè)平臺的深遠(yuǎn)海漁業(yè)發(fā)展現(xiàn)狀與思考[J]. 中國農(nóng)學(xué)通報, 2020, 36(25): 152-157.
[2] 吳侃侃, 李青生, 黃海萍, 等. 我國深遠(yuǎn)海養(yǎng)殖現(xiàn)狀及發(fā)展對策[J]. 海洋開發(fā)與管理, 2022, 39(10): 11-18.
[3] 何笑書. 泳池清潔機器人的研究與設(shè)計[D]. 杭州: 浙江工業(yè)大學(xué), 2020.
[4] 衣正堯, 弓永軍, 王祖溫, 等. 一種超高壓純水射流船舶除銹系統(tǒng)設(shè)計方案研究[J]. 液壓與氣動, 2010(11): 26-28.
[5] Narewski M. Hismar-underwater hull inspection and cleaning system as a tool for ship propulsion system performance increase[J]. J Pol CIMAC, 2009, 4(2): 227-232.
[6] Amran I Y, Razal N S M, Isa K. Adaptive control simulation for multiagent autonomous underwater cleaning robot[J]. Indian J. Geo Mar Sci, 2021, 50(11): 938-943.
[7] 王書銓, 宮海, 王義杰, 等. 一種磁吸附壁面移動機構(gòu)[J]. 機器人, 1995(1): 21-24.
[8] 吳明暉. 面向焊接任務(wù)的輪足式非接觸磁吸附爬壁機器人研究[D]. 上海: 上海交通大學(xué), 2014.
[9] 梅滿, 朱大奇, 甘文洋, 等. 基于模型預(yù)測控制的水下機器人軌跡跟蹤[J]. 控制工程, 2019, 26(10): 1917-1924.
[10] Fossen T I. Handbook of marine craft hydrodynamics and motion control[M]. Hoboken: Wiley, 2011.
[11] 周翔. 大尺度環(huán)境下的AUV路徑規(guī)劃與路徑跟蹤[D]. 青島: 中國海洋大學(xué), 2010.
An underwater robot for the bulkhead cleaning of farmer ships
Wang Yunjie1,2, Lin Liqun1,2, Ma Fengshuang1,2, Xu Zhiqiang1,2, Gao Diju3
(1.Fishery Machinery and Instrument Research Institute, Chinese Academy of Fishery Sciences, Shanghai 200092, China; 2. Key Laboratory of Ocean Fishing Vessel and Equipment, Ministry of Agriculture and Rural Affairs of the P.R.C, Shanghai 200092, China; 3. Shanghai Maritime University, Shanghai 201306, China)
U672.7
A
1003-4862(2023)09-0071-05
2023-04-23
山東省重點研發(fā)計劃項目(2021SFGC0701);浙江省“尖兵”“領(lǐng)雁”研發(fā)攻關(guān)計劃項目(2022C03023);中國水產(chǎn)科學(xué)研究院協(xié)同創(chuàng)新項目(2023XT06)
王云杰(1988-),男,助理研究員,研究方向:漁業(yè)水下機器人。E-mail:wangyunjie@fmiri.ac.cn
猜你喜歡
艦船科學(xué)技術(shù)(2022年8期)2022-06-05 07:37:02
能源工程(2020年6期)2021-01-26 00:55:22
山東冶金(2019年3期)2019-07-10 00:54:04
消費導(dǎo)刊(2018年10期)2018-08-20 02:57:02
山東工業(yè)技術(shù)(2016年15期)2016-12-01 05:31:37
通信電源技術(shù)(2016年1期)2016-04-16 04:57:26
電測與儀表(2016年20期)2016-04-11 11:38:24
通信電源技術(shù)(2016年5期)2016-03-22 01:09:38
電機與控制應(yīng)用(2015年2期)2015-03-01 03:49:24
電測與儀表(2014年24期)2014-04-09 11:35:36