利用深度神經網絡實現分布式相干瑞利光纖振動事件分類?
2023-09-15 12:36:26彭任華袁旻忞鄭成詩李曉東
應用聲學 2023年4期
彭任華 周 琰 袁旻忞 鄭成詩 李曉東
(1 中國科學院聲學研究所 北京 100190)
(2 中國科學院大學 北京 100049)
(3 國家石油天然氣管網集團有限公司科學技術研究總院分公司 廊坊 065000)
(4 國家環境保護道路交通噪聲控制工程技術中心 北京 100088)
(5 交通運輸部公路科學研究院 北京 100088)
0 引言
長距離輸油/氣管道由于運量大、建設成本低、占地少、損耗小等優點,在石油、天然氣運輸過程中占有舉足輕重的地位。近年來,城市建設的擴張以及打孔盜油/氣活動的猖獗,使得輸油/氣管道面臨日益嚴重的安全威脅[1]。除城市建設過程中的各類機械作業,管道附近還存在農田鋤地、汽車行駛等種類繁多的振動作業。不同振動作業對管道安全運行具有不同的威脅等級,對這些振動作業進行分類識別在輸油/氣管道的安全監測過程中具有非常重大的研究意義。
傳統的管道安全監測采用人工巡線方式,在管道沿線泵站配備工作人員,定期巡線檢查。這種方法耗時長、成本高,不能及時發現威脅管道安全運行事件;同時不適用于沙漠、湖泊、沼澤等環境惡劣的區域。另一種管道安全監測方法是利用負壓波方法:管道發生泄漏時會在泄漏點附近會產生壓力突降,并以負壓力波方式向兩端傳輸。負壓波方法利用壓力傳感器,在一段輸油管道的上游與下游分別測量管道內壓力變化,檢測是否發生泄漏,同時利用兩端負壓力波的時間差定位泄漏點位置[2]。然而,負壓波方法對泵站正常的開/關閥門具有較多虛警,同時存在定位不準等缺點。常規的人工巡線、負壓波方法等管道安全監測方法普遍存在不能提前預報管道安全運行威脅事件的問題,即不能安全預警,僅能在威脅事件造成實質破壞之后給出報警。近年來,一種利用分布式傳感光纖進行管道安全預警的方式得到越來越廣泛的應用。
根據分布式光纖傳感原理不同,常見的分布式光纖傳感技術可以分為干涉型以及散射型兩大類。干涉型分布式光纖傳感包括Michelson 光纖干涉儀、Mach-Zehnder 光纖干涉儀、Sagnac 光纖干涉儀以及各種復合干涉儀,具體結構與工作原理詳見文獻[3]。后向散射型分布式光纖傳感主要利用光時域反射計(Optical time domain reflectmeter,OTDR)實現各種類型傳感[4-7]。與OTDR 原理相同的是,光頻域反射計(Optical frequency domain reflectmeter,OFDR)是利用光纖瑞利散射進行分布式測量,區別在于OFDR是通過測量拍頻信號的頻率進行空間定位,對激光光源要求極高[8]。
非法施工以及打孔盜油等威脅事件不可避免地會對光纖產生外部擾動,外部擾動會引起相應位置土層的振動進而影響光纖本身的振動,從而使后向瑞利散射光相位發生變化[9-10]。本文從實際應用出發,僅考慮基于相位敏感光時域反射的?-OTDR 技術。圖1 給出了?-OTDR 系統框圖,系統利用激光作為傳感介質,光纖作為傳輸通道,可以同時獲取傳感光纖區域內隨時間和空間變化的傳感信息[11],結合高速數據采集以及信號處理可以搭建實時的光纖安全預警系統[12-13]。圖1 中脈沖激光器周期性輸出的脈沖光源通過3 dB 耦合器注入光纖,激光在光纖中傳輸會產生后向散射,后向散射光被外部擾動所調制從而攜帶傳感信息。單個激光脈沖的所有后向散射光攜帶了沿光纖空間分布的傳感信息,利用OTDR對空間分布的傳感信息進行空間定位[14]。PD 為光電檢測器,將攜帶傳感信息的后向散射光轉化為電信號,通過對每個周期內的后向散射光進行數據采集,就可以獲得不同時刻沿光纖分布的傳感信號,通過后端信號處理從而進行光纖預警。
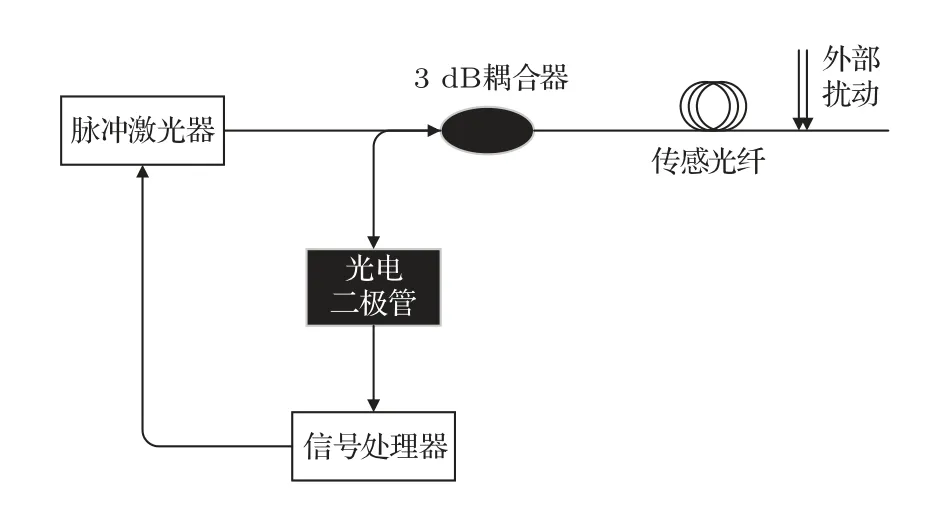
圖1 分布式?—OTDR 光纖傳感系統Fig.1 Distributed ?—OTDR fiber sensor system
在光纖安全預警系統中,需要對光纖附近的外部擾動進行分類識別,從而采取正確的防范措施。本文提出利用深度神經網絡模型對光纖振動事件進行分類識別,提取了多維光纖振動信號特征量,同時在西氣東輸一線無錫至蘇州段開展實際線路測試,實驗結果驗證了本文算法的有效性。本文內容安排如下:第1 節介紹分布式光纖傳感系統信號模型;第2節通過對土層等效建模,定性分析了在外部振動作用下光纖信號頻率特性;第3 節給出了不同振動作業分類識別的基本流程以及實驗結果;第4節給出了本文總結。
1 ?—OTDR 分布式光纖傳感系統信號模型
如圖1 所示,?-OTDR 使用的激光源為高度相干的連續窄帶激光經過光電脈沖調制器調制的脈沖激光源。假設激光頻率為w,脈沖脈寬為TP,激光在光纖中傳播速度為cg,那么激光在光纖中傳播的電磁場強度p(t,z)數學表達式可以寫成:
其中,t為激光注入光纖后的傳播時間,t>TP;E0為入射端電磁場強度;z為光纖中某一點的位置z>0,τ時刻脈沖波陣面在光纖中的位置z=cgt;α為光纖衰減常數;rect(τ)為矩形窗函數,rect(τ)=1 當且僅當0<τ<1。
后向瑞利散射激光頻率與入射激光頻率一致。相位變化受到外部擾動調制,假設z位置處外部擾動v(t,z)引起的相位變化為θ(t,z)=f(v(t,z)),其中f(?)為外部擾動到相位變化的映射函數。那么z位置處后向瑞利散射光在光纖入射端表達式有
其中,s為反向散射系數[15],αs(z)為瑞利散射因子[16]。由式(2) 可知τ時刻到達光纖入射端的后向瑞利散射光對應的光纖位置并不只有一點,而是光纖中的一段距離,滿足cgt/2 >z>cg(t-TP)/2。由于在此范圍內所有點的散射光同時到達光纖入射端,因此系統理論空間分辨率為Rt=cgTP/2。而τ時刻光纖入射端后向瑞利散射光pr(t)是所有位置散射光的疊加,有
表示僅受外部擾動影響的光纖傳感信號量。?(t)式中還可以看出,τ時刻的后向瑞利散射光僅與空間范圍z∈[cg(t-TP)/2,cgt/2] 分布的外部擾動θ(t,z)有關,而與其他空間區域擾動無關,同時還受激光光源頻率變化的影響。后向瑞利散射光在入射端光強有
由式(5)可知:(1) 任一時刻t探測器接收到的后向瑞利散射光光強僅與空間位置z∈[cg(t-TP)/2,cgt/2]區域內的外部擾動相關,并且隨時間而呈指數衰減。由于時刻t與空間位置z存在一一對應關系,可以認為后向瑞利散射光強在光纖中隨光纖位置呈指數衰減特性;(2) 外部擾動會引起光纖瑞利后向散射光光強變化,從而可以根據探測光光強變化判斷外界擾動類型。圖2 給出了典型的后向瑞利散射光光強隨空間變化的分布圖。
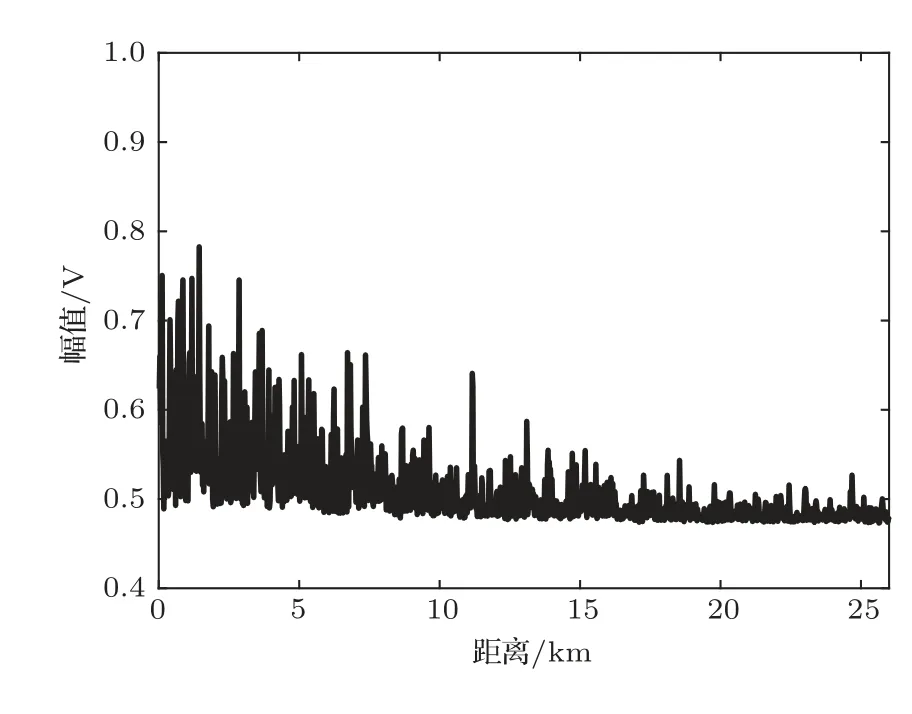
圖2 后向瑞利散射光強隨空間分布Fig.2 Reyleigh backscattering spatial distribution
在光纖入射端對單個激光脈沖產生的后向瑞利散射光進行連續信號采樣,采樣率為fs,那么相鄰采樣點的采樣空間分辨率為Rs=cg/2fs。要保證各采樣點相互獨立,要求采樣空間分辨率大于系統空間分辨率,即Rs>Rt,對采樣率要求為fs<1/TP。
為獲得空間某一點傳感信號隨時間的變化量,在光纖入射端輸入的是周期性的脈沖激光源,假設周期性脈沖的周期為T,那么第n個激光脈沖產生的后向瑞利散射光光強有
其中,Ar(nT+t)表示第n個激光脈沖之后t時刻后向瑞利散射光強隨外部振動信號的變化。僅與空間位置z∈[cg(t-TP)/2,cgt/2]的外部擾動有關,因此不同周期激光脈沖之后相同延時的采樣點對應的是相同空間位置不同時刻外部擾動信號變化量。相鄰周期的后向瑞利散射光要求不能重疊,因此脈沖周期需要滿足T>2L/cg,其中L為傳感光纖長度。
圖3 給出了基于相干瑞利光纖傳感系統在位于6.36 km 位置處有人工鋤地振動作業下的后向瑞利散射光光強隨時間分布圖,圖中可以清晰地看出每次人工鋤地作業產生的類似振動脈沖信號。
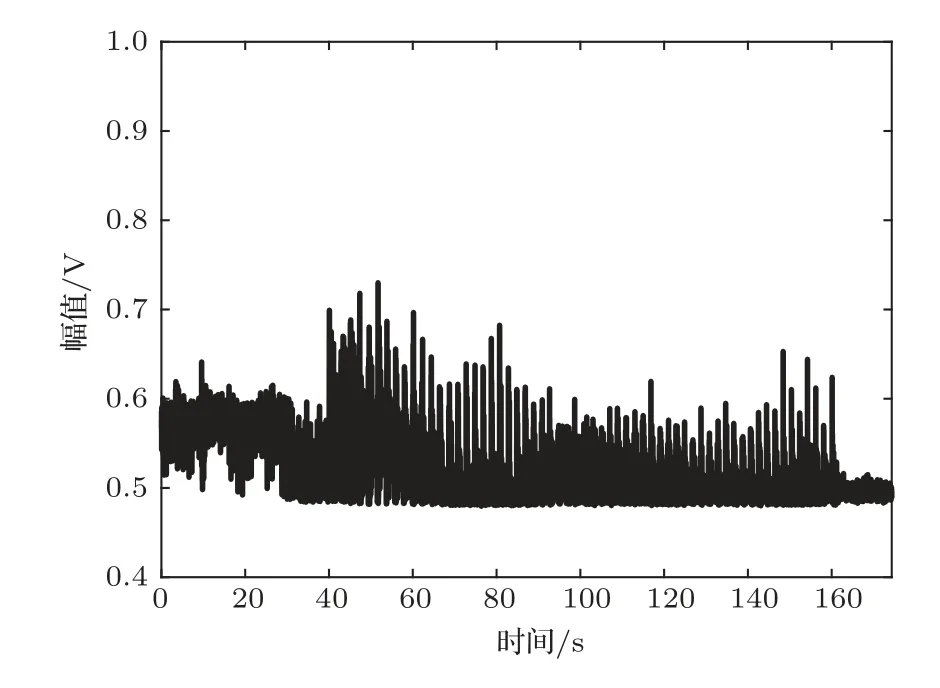
圖3 后向瑞利散射光光強隨時間分布Fig.3 Rayleigh backscattering temporal distribution
2 土壤土層振動模型及對光纖振動信號影響
由式(6)可知,光纖z位置處土壤土層振動信號v(nT+t,z)對光纖傳感信號Ar(nT+t)的影響表現在相位變化θ(nT+t,z)的積分公式?(nT+t)中。由于外部擾動引起相位變化的映射函數f(?)未知,本文僅考慮振動信號v(nT+t,z)的信號模型以及對光纖振動影響的分析。
可以將光纖傳感器、光纖與地表之間的土層以及外部擾動等效為一彈簧振子模型,圖4 給出了這一等效模型示意圖。圖4 中,m為土層等效質量,k為等效彈簧勁度系數。在外界擾動作用力u(t,z)作用下,施加給光纖的壓力擾動v(t,z)滿足[17]

圖4 土壤土層振動模型Fig.4 Vibration model of soil
其中,g為重力加速度常數;γ為彈簧振子運動摩擦常數。忽略γ的影響,求解式(7)微分方程有
其中,V(ω,z)、U(ω,z)分別是v(t,z)、u(t,z)的傅里葉變換。
為驗證彈簧等效模型的有效性,本文通過在光纖附近埋放振動加速度傳感器測量土層振動信號進行驗證。選取兩處具有典型特征的土壤土層測試點進行測試,測試點1選擇為含水量較少的旱地;測試點2 選擇為含水量較多的濕地。加速度傳感器采用防水密封處理埋放在光纖附近10 cm 處,水平深度與光纖持平。在加速度傳感器正上方進行拍打作業,圖5、圖6 分別給出了兩處測試點加速度傳感器在有無振動條件下時域波形以及頻域波形。圖6 中可以明顯觀察到加速度振動信號的共振峰結構,測試點1 共振峰頻率為ω1=68 Hz,測試點2 共振峰頻率為ω2=52 Hz。這是由于測試點2 附近土壤由于靠近水溝,土層含水量增大,造成等效彈簧勁度系數偏低,共振峰頻率向低頻移動。
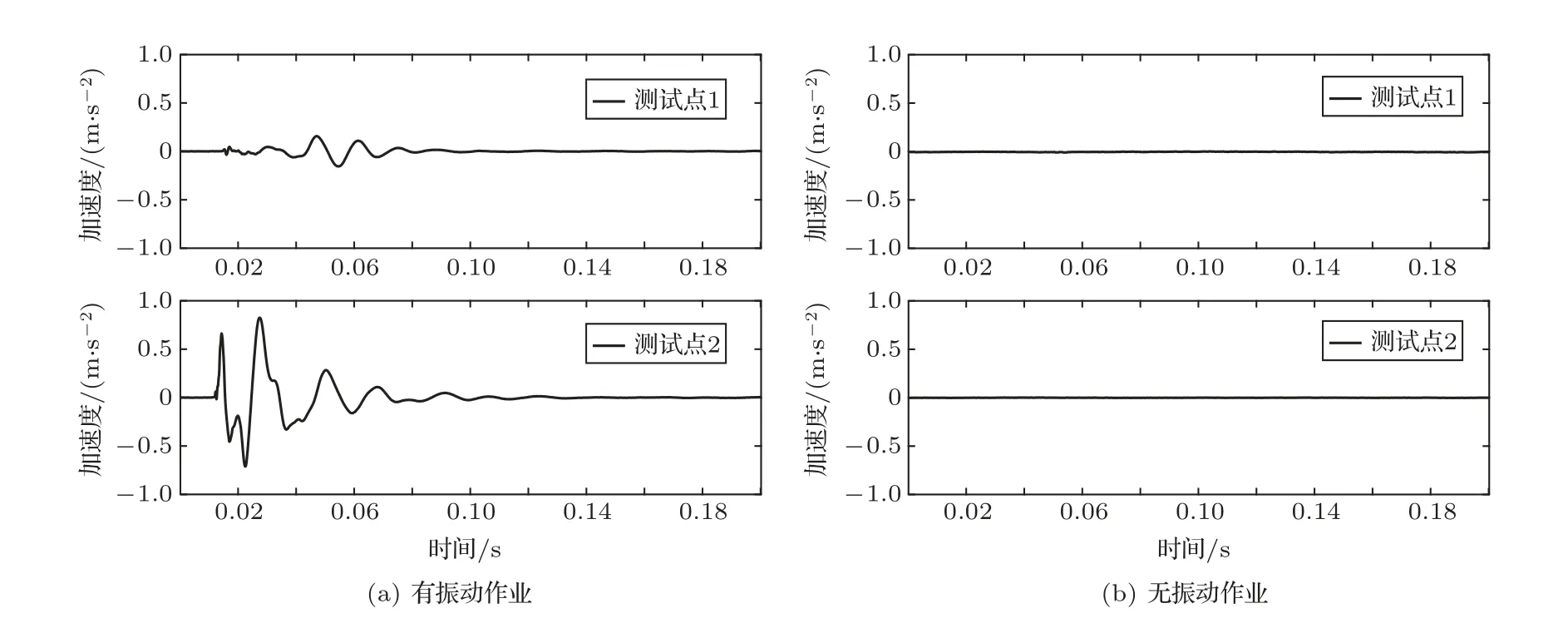
圖5 振動加速度信號時域波形Fig.5 Acceleration waveform
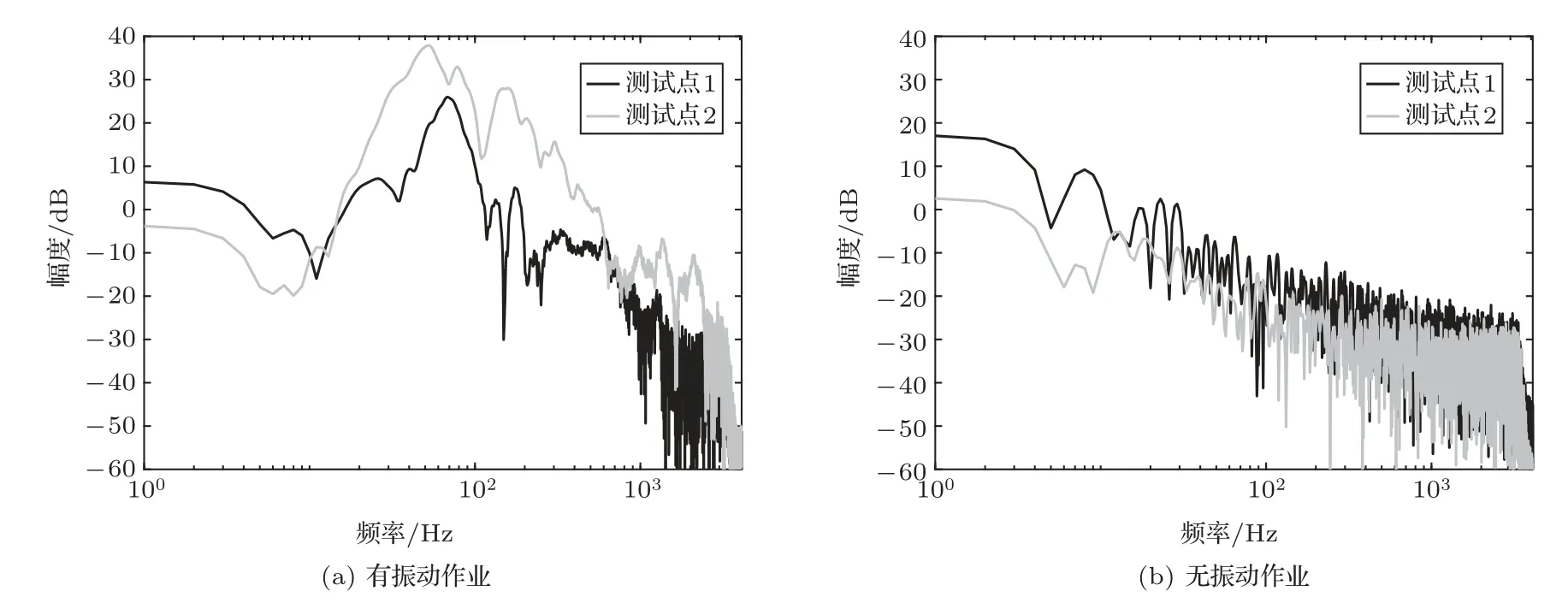
圖6 振動加速度信號頻域波形Fig.6 Acceleration frequency curve
在光纖安全預警系統中,威脅事件產生的外部擾動到光纖要經過光纖埋深的土壤土層進行傳播。因此,本文同時開展了土壤土層振動傳播模型的實驗研究。實驗中,采用兩個相同型號加速度傳感器,1 號加速度傳感器埋放在光纖附近,距地面埋深2.5 m;2 號加速度傳感器埋放在與1 號傳聲器正上方,距地面埋深0.5 m,在2 號傳感器正上方進行振動激勵。激勵重復20次,利用自相關函數將20次激勵信號進行時間對齊,計算頻域信號并取平均,比較加速度傳感器各個頻帶平均幅值的衰減如圖7 所示。圖7中可以看出,兩處加速度傳感器振動信號共振峰頻率一致,在共振峰頻率附近1 號加速度計的能量相比2 號加速度計要衰減7 dB 左右,這主要是振動向四周擴散導致的傳播能量衰減;而在100 Hz頻率范圍以上,1號加速度計能量相比2號加速度計的衰減隨著頻率的增高,衰減逐漸增大,這主要是土壤土層高頻能量吸收導致的。

圖7 土壤土層振動衰減Fig.7 Vibration attenuation of soil
由以上分析可知,不同土壤土層具有不同的振動特性,土壤土層的等效勁度系數以及等效質量直接決定了土層的共振峰頻率。由于土層等效勁度系數較低,等效質量較大,共振峰頻率集中在低頻,因此土層對振動信號的高頻具有明顯的衰減作用。在光纖傳感信號處理過程中也需要考慮此高頻衰減產生的影響。
3 相干瑞利光纖傳感振動信號分類識別
由于外部擾動信號v(t,z)到相位變化θ(t,z)的映射函數f(v(t,z))未知,傳統的光纖預警系統僅能判斷外部擾動是否發生,通過對擾動前后的后向瑞利散射光強相減得到差分信號,檢測差值大小判斷擾動信號是否發生[6]。這種方法由于要對多個周期的后向瑞利散射光強進行平滑估計,時間分辨率低,同時系統的虛警較高。由于并不是所有的外部擾動都對管道光纖具有威脅,因此光纖安全預警系統不僅要求對外部擾動事件進行識別,還需要對不同的擾動事件進行分類。本文基于深度神經網絡構造了具有5 層全連接網絡結構的光纖振動信號分類識別器,提取了多維光纖振動信號特征量并進行分類識別。
3.1 光纖傳感振動信號數據采集
本文中,分布式相干瑞利光纖傳感系統中的光纖是隨管道鋪設的通信備用光纖,脈沖激光光源波長為λ=1550 nm,脈寬為TP=50 ns,對應系統理論空間分辨率為5 m,脈沖周期T=2 ms,對應光纖某固定位置振動時域信號采樣率為f0=500 Hz。在西氣東輸一線無錫至蘇州段開展現場測試,光纖長度為48 km,后向瑞利散射光光強信號采樣率fs=5 MHz,對應的采樣空間分辨率為Rs=20 m,單個周期內采樣點個數為2400。
根據激光脈寬以及信號采樣頻率,系統分辨率以及采樣分辨率如圖8 所示,系統理論上會出現不能探測區域。這是由于一方面振動作業影響區域一般會大于采樣分辨率,實際上不會出現振動信號不能探測的情況;另一方面空間分辨率越大,單個周期采樣點個數越小,數據吞吐量越小,系統計算負載也越小,因此采樣空間分辨率設置為折中取值。
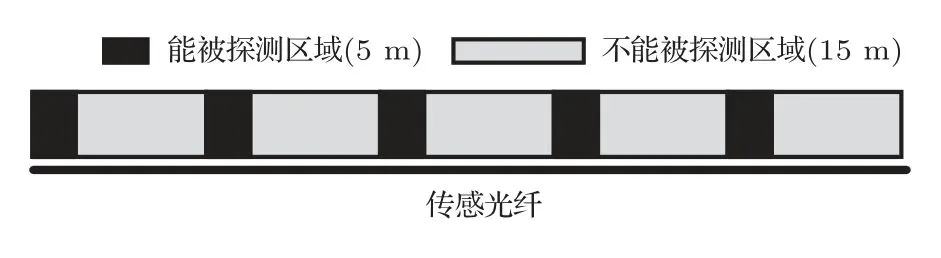
圖8 系統理論分辨率以及采樣分辨率Fig.8 Theoretic resolution of system and sampling
采集的光纖信號振動類型包括:鐵鍬拍打地面,簡稱人工鋤地;伴行公路的車輛行走,簡稱車輛行走;大型機械挖掘機挖土作業,簡稱機械挖掘;機械破錘水泥路面,簡稱機械破錘;壓路機壓平路面作業,簡稱壓路行走;重載貨車行走,簡稱重車行走;鏟車推土作業,簡稱鏟車推土;鉆孔機在光纖下方打孔作業,簡稱定向鉆孔,共8 種光纖傳感振動類型。需要將此8 種振動信號與背景噪聲進行分類識別,因此需要識別的信號種類為9 種類型。采集的不同振動作業類型總時長以及振動作業距離見表1所示。
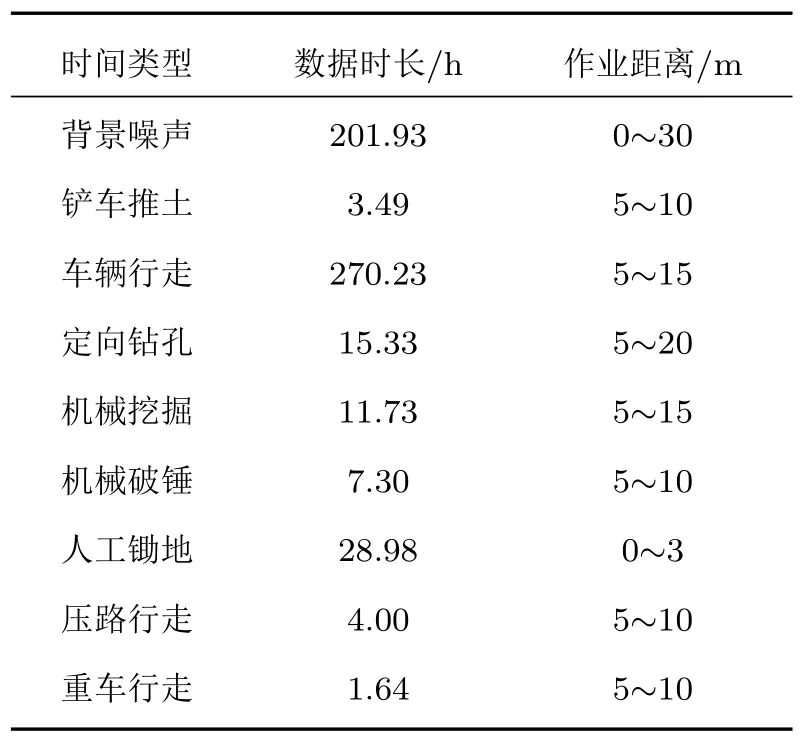
表1 振動作業事件類型明細Table 1 Details of vibration events
圖9(a)~(h)分別給出了人工鋤地、車輛行走、鏟車推土、定向鉆孔、機械挖掘、機械破錘、壓路行走、重車行走8 種振動作業下采集到的光纖傳感信號時域波形,圖9(A)~(H)給出了對應振動信號的短時頻譜圖,短時頻譜圖是對單個空間采樣點連續時間采樣信號進行分幀加窗短時傅里葉變換(Short time Fourier transform,STFT),幀長為512,幀移為128,窗函數為漢明窗。
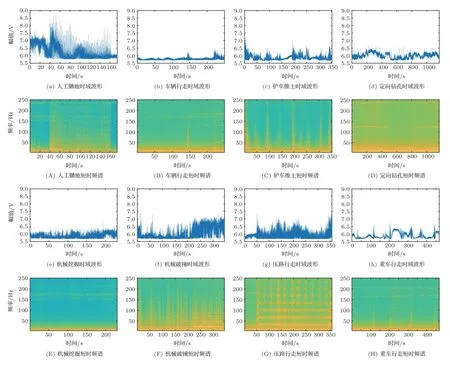
圖9 振動作業光纖信號時域波形圖及短時頻譜圖Fig.9 Waveform and short time spectrum
從圖9 中可以看出,不同振動作業表現的光纖傳感信號具有不同的時域以及頻域特征。人工鋤地振動作業持續時間較短,頻譜較寬,表現出短時脈沖特性;車輛行走持續時間較長,低頻較重;鏟車推土頻帶更寬;定向轉孔在中頻段(100 Hz 附近)具有比較明顯的諧頻特性;機械挖掘能量主要集中在低頻,持續時間較長;機械破捶出現較多的諧波結構,諧波基頻在20 Hz 附近;壓路行走作業同樣會出現諧波結構,諧波基頻在30 Hz附近,并且在全頻帶范圍都出現諧波結構;重車行走表現為時域上隨機出現的低頻信號為主。不同振動作業類型表現出不同的時域、頻域特征,是分類識別的基礎。
3.2 光纖傳感振動信號數據處理及特征提取
系統采集到信號是后向瑞利散射光光強信號,具有較大的直流偏置,如圖2、圖3、圖9 所示。首先需要對各空間采樣點的光纖時域信號進行高通濾波,去除直流分量,本文利用4 階無限脈沖沖擊響應(Infinite impulse response,IIR)濾波器實現信號濾波,濾波器低頻截止頻率為5 Hz。
假設s(n)為空間z位置處光纖傳感信號Ar(nT+z/cg)經高通濾波器之后的濾波信號,n為時間采樣點索引值,不同索引對應的時間間隔為脈沖激光光源的周期T。需要對s(n)分幀處理以達到實時預警的目的,選取幀長為N,幀移為M,那么第p幀信號的STFT為
STFT 是在頻率域的均勻采樣,由于外部振動信號經土層傳播會引起高頻衰減,光纖傳感振動信號能量集中在低頻,為了使能量均勻擴散在各個頻帶,減少頻帶間能量差異,利用梅爾對數頻率(Mel frequency)的非均勻特性,構造了頻率到梅爾對數頻率的映射關系式如下:
其中,N(k,p)是噪聲信號的STFT,由帶噪信號S(k,p)估計噪聲功率譜|N(k,p)|2的具體估計方式參考文獻[18]。
本文將ξsnr(q,p)作為振動信號分類識別的特征量。根據圖9 給出的不同振動信號時域波形以及短時頻譜波形分析,不同振動信號會表現出不同的時域特性,通過利用連續的P幀信號特征量構造一個具有B?P維振動信號分類識別樣本。
其中,tk=1 表示識別目標樣本中第k維度取值為1,用來表示第k種光纖振動信號類型。
3.3 基于深度神經網絡的振動信號分類識別
根據信號幀移以及幀長分析,構造分類識別輸入信號特征需要M?P個激光脈沖周期,對應的算法時延為B?P?T。光纖實時預警系統要求在此時延之內給出分類識別結果,同時為了保證光纖沿線所有采樣點的時間一致,需要對光纖所有采樣點在相同算法時延之內同時給出識別結果。為滿足實時計算需求,本文構造了一個具有5 層結構的全連接深度神經網絡,全連接深度神經網絡由于具有專門的硬件加速結構,廣泛應用于實際系統部署之中。
深度神經網絡結構示意圖如圖10 所示。其中,網絡層數用nl表示,第l層記為Ll,l層神經元個數記為sl。L1為輸入層,輸入數據為提取的多維信號特征量,因此s1=B?P;Lnl為輸出層,輸出為各振動事件的概率值,本文中神經網絡輸出結果共有9 個,因此snl=9。輸入層與輸出層之間的層稱之為隱藏層,層與層之間通過權值相連,l層與l+1層之間權值系數用矩陣表示,其中為sl×sl+1二維矩陣。矩陣中第i行、第j列元素表示為第l層的j神經單元與第l+1 層的i神經單元權值系數。那么第l+1 層神經元激活值向量al+1可以用神經網絡的前饋傳播計算公式計算:
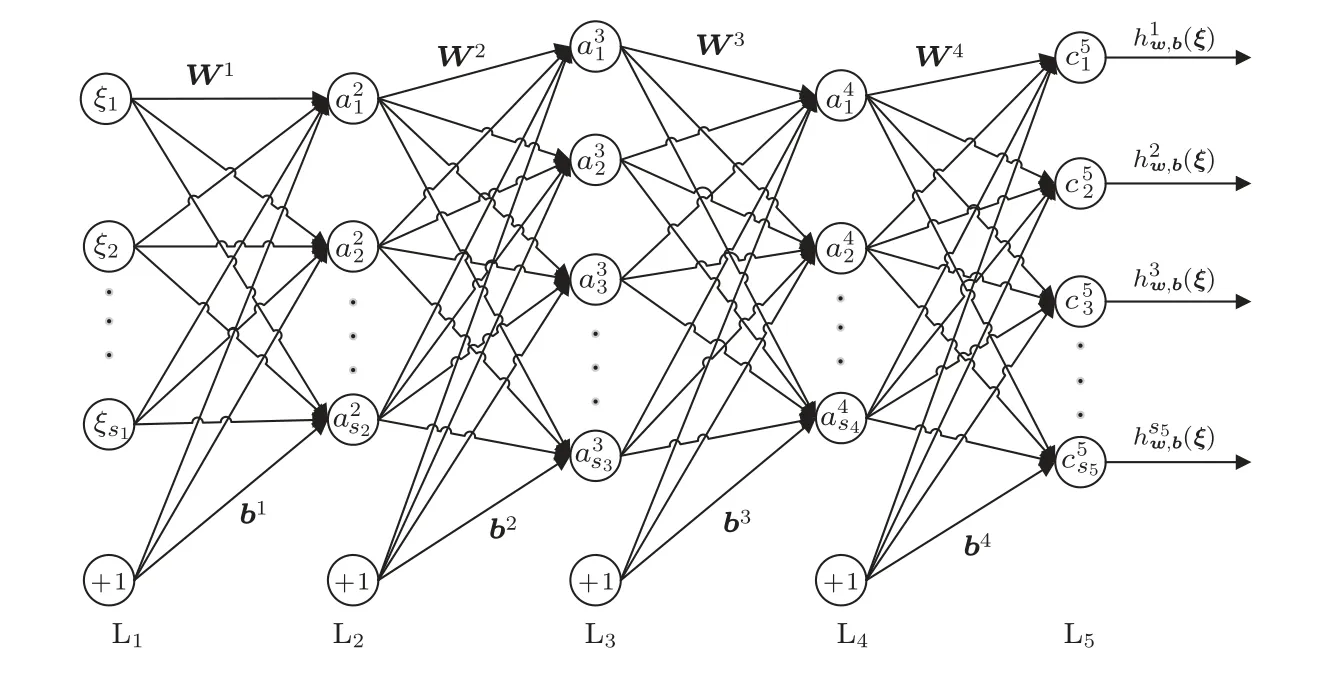
圖10 5 層神經網絡結構圖Fig.10 Architecture of five layers deep neural network
其中,zl為l+1 層神經元輸入向量,h(z)=1/(1+exp(-z))為神經元激活函數,bl為l層與l+1層之間偏置向量。輸出層神經元激活函數是指數函數h(z)=exp(z),輸出層第i個神經元輸出值記為
深度神經網絡首先需要訓練網絡神經元權值參數矩陣Wl以及偏置向量bl,l=1,2,··,nl-1。利用提取的信號特征量以及相對應的振動事件類型構造帶標簽的訓練數據(ξ?φ),其中ξ為3.2 節構造的B?P維輸入信號特征向量,φ為振動事件標簽向量〈0,0,··,tk,··0〉。參數訓練采用限制玻爾茲曼機(Restricted Boltzmann machine,RBM)確定每層參數的初始值,并用后向傳播(Back propagating,BP)算法尋優,具體參數訓練參考文獻[19]。
在優化參數矩陣Wl以及偏置向量bl后,網絡在輸入信號特征向量ξ判斷第k種振動事件發生的概率為
其中,通過比較每種振動事件概率大小,確定最大概率的振動事件作為光纖預警判斷的結果。
3.4 實驗結果與分析
利用采集的實際光纖傳感振動信號以及對應的作業類型,提取相應的輸入信號特征向量以及目標向量構造數據樣本,所有的樣本數據按照樣本數量7 : 3 比值大小隨機地分配為訓練數據集以及測試數據集。本文利用梅爾對數頻率的非均勻特性提取了25 維單幀信號特征量,并利用連續40 幀組成包括時變信號特性的高維特征向量,對數頻帶個數B設置為B=25,連續幀個數P設置為P=40,對應的全連接深度網絡輸入信號維度s1=1000,第二層網絡節點個數為s2=800,第三層網絡節點個數為s3=500,第四層網絡節點個數為s4=300,輸出層網絡節點個數為s5=9。網絡訓練過程采用的批處理大小為128,網絡優化損失函數為交叉熵損失函數。
3.4.1 光纖振動信號識別率
測試數據集上分類識別結果如表2 所示。表2中每一行表示某一種振動作業類型識別為其他振動作業類型的概率:對角線元素表示每種振動作業類型的識別準確率,非對角線元素表示不同作業之間的錯誤識別率。
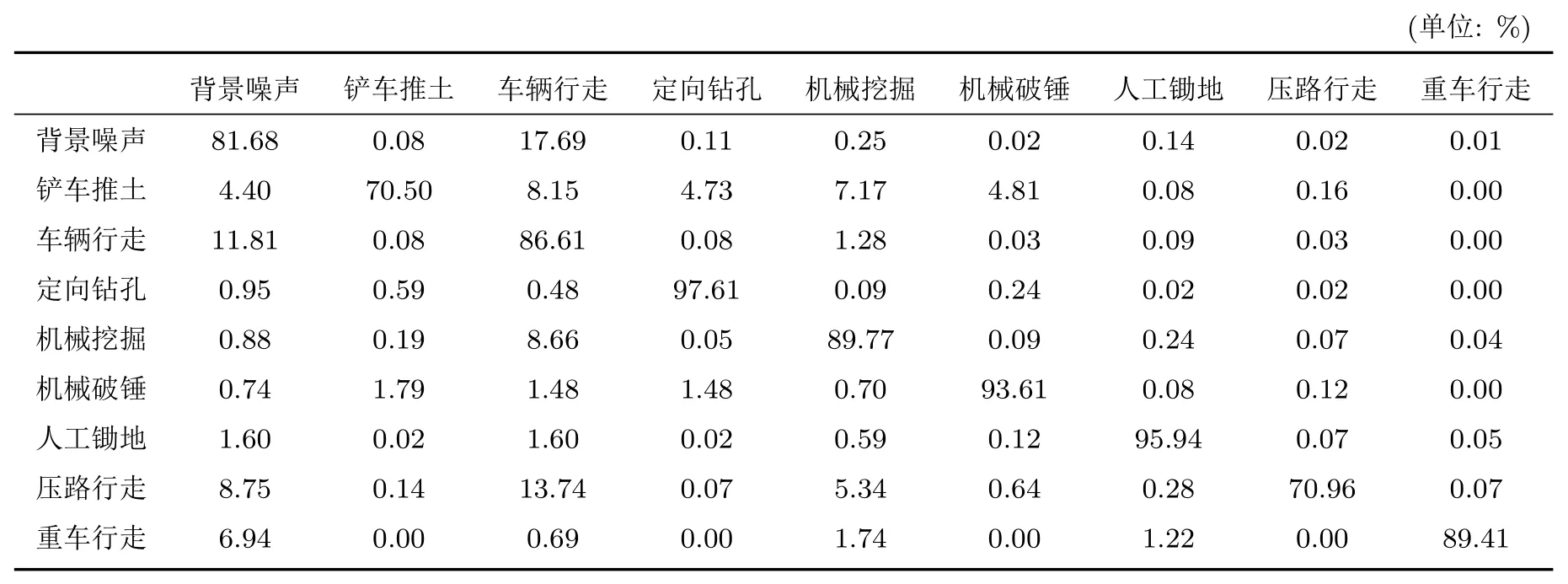
表2 神經網絡振動信號分類識別結果件類型明細Table 2 Vibration events classification results of neural network
從表2 中可以看出:對于人工鋤地以及定向鉆孔這兩種振動作業,本文實現了95%以上的識別準確率;對于車輛行走、機械挖掘、機械破錘以及重車行走,本文實現了90%附近的識別準確率;對背景噪聲的識別準確率大于80%;對于鏟車推土以及壓路行走識別準確率大于70%。鏟車推土以及壓路行走識別準確率偏低分析原因可能是這兩類振動作業與車輛行走通過管道光纖模式類似,這也可以從這兩類振動作業識別錯誤結果集中在車輛行走中看出。
3.4.2 光纖振動信號識別瀑布圖
利用本文分類識別結果,將光纖全線采樣點識別結果進行瀑布圖實時顯示,瀑布圖橫軸表示不同采樣點距入射端距離,縱軸表示UTC 北京時間,不同顏色表示不同振動作業類型。瀑布圖中間隔20幀給出全線空間采樣點的一次識別結果(對應10 s更新一次)。
由于鏟車推土、定向鉆孔、機械挖掘、機械破捶,壓路行走以及重車行走均為大型機械作業產生的振動信號,對光纖安全威脅等級最高,在瀑布圖顯示中,將此5 種振動作業進行歸并,統一由紅色表示;人工鋤地由黃色表示,車輛行走由綠色表示,背景噪聲由藍色顯示。圖11 給出了在距光纖入射端14.2 km 附近,人工鋤地振動作業采用本文算法識別結果瀑布圖(瀑布圖中僅顯示10~30 km 區域范圍),持續時間約為2 min,圖11(a)為下午1:42 給出的瀑布圖截圖,圖11(b)為下午1:48 給出的瀑布圖截圖。瀑布圖中可以看出在14.2 km 附近出現的黃色識別結果表示人工鋤地作業類型,出現位置與實際作業位置吻合,持續時間與實際作業時間吻合。
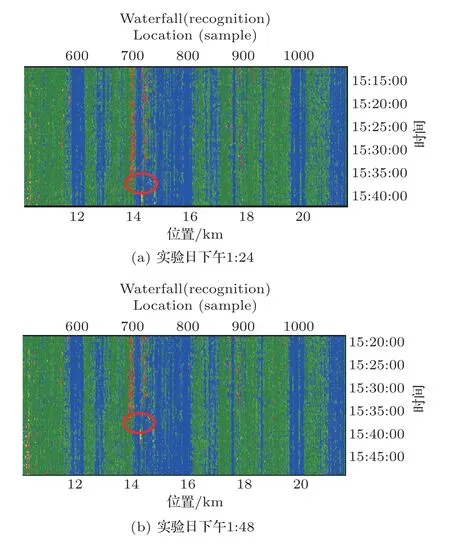
圖11 人工鋤地識別結果瀑布圖Fig.11 Waterfall results of artificial hoeing
在距光纖入射端14.6 km 附近組織一次機械挖掘振動作業,作業持續約15 min,暫停約5 min 后繼續作業。圖12 給出了采用本文算法識別結果瀑布圖(瀑布圖中僅顯示12.5~18 km 區域范圍)。瀑布圖中可以看出在14.6 km 附近,出現的紅色識別結果表示機械振動作業類型,與實際振動作業吻合。持續時間與實際組織振動作業相吻合,表明本文算法的有效性。同時比較人工鋤地瀑布圖,可以看出機械挖掘振動作業瀑布圖在實際作業的14.6 km 附近同時出現大片機械挖掘識別結果,這是機械作業影響的范圍要比人工鋤地大導致的。
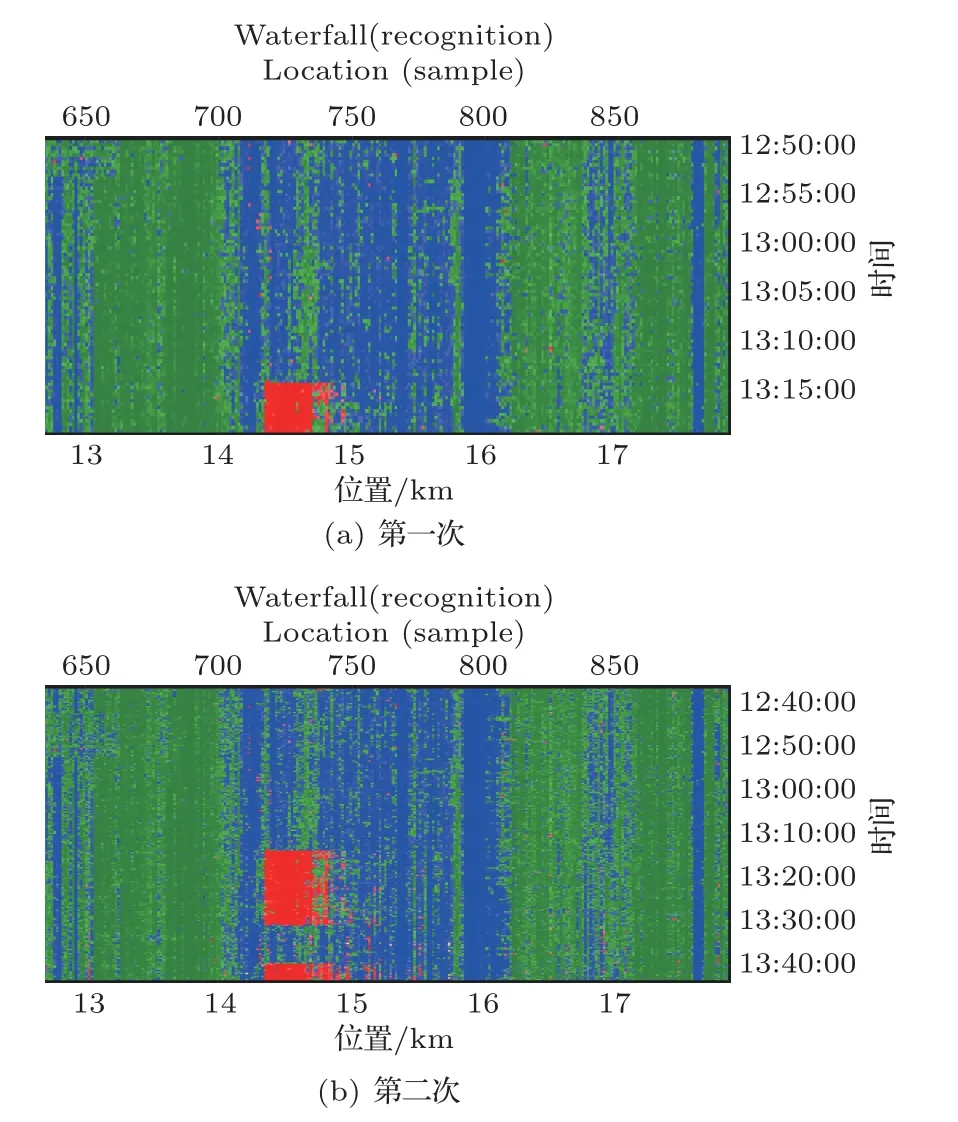
圖12 機械挖掘識別結果瀑布圖Fig.12 Waterfall results of mechanical excavation
從圖11 以及圖12 中可以看出,在目標振動作業出現位置以及時間以外,仍存在零散分布的紅點(誤識別),這是由于在瀑布圖所顯示空間(2400個空間采樣點)以及時間區域內(最近1 h,360個刷新間隔),顯示的識別樣本個數為2400×360=86400,而本文算法對背景噪聲識別為機械挖掘或者車輛行走識別為機械挖掘的誤識別率不為零,使得在瀑布圖中存在若干個零散分布的誤識別小紅點。由于大型機械振動作業持續時間以及影響范圍都較大,可以方便地在瀑布圖中加以識別并報警,瀑布圖后處理不在本文討論范圍內。
4 結論
本文基于分布式相干瑞利光纖傳感系統以及振動加速度傳感器,在西氣東輸一線無錫至蘇州段開展了現場測試,采集了大量光纖傳感信號以及土壤土層振動信號。土層的彈簧振子等效模型表明土壤土層的等效勁度系數決定了土壤土層的共振峰頻率,土層會對振動傳播信號會造成明顯的高頻衰減;提出了一種具有5 層全連接網絡結構的深度神經網絡模型用于不同振動作業事件的分類識別,利用梅爾對數頻率的非均勻特性提取了25 維單幀信號特征量,并利用連續40幀組成包括時變信號特性的高維特征向量,實現了光纖預警系統中8 種常見振動作業以及背景噪聲的分類識別,實際光纖振動分類識別實驗驗證了本文提供算法的有效性。
猜你喜歡
科學大眾(2023年17期)2023-10-26 07:39:14
鴨綠江(2021年35期)2021-04-19 12:24:18
考試與評價·高一版(2020年6期)2020-11-02 02:45:24
天天愛科學(2020年6期)2020-09-10 07:22:44
少年博覽·初中版(2020年6期)2020-06-12 11:42:23
電子制作(2018年11期)2018-08-04 03:25:42
數學物理學報(2017年6期)2018-01-22 02:26:40
故事大王(2016年7期)2016-09-22 17:30:08
鑿巖機械氣動工具(2016年3期)2016-03-01 04:00:25
計算物理(2014年2期)2014-03-11 17:01:44