防搖功能在回轉(zhuǎn)起重機(jī)上的運(yùn)用
2023-09-16 08:57:38朱晨嶸王佳俊羅佩玉
起重運(yùn)輸機(jī)械 2023年16期
朱晨嶸 王佳俊 羅佩玉
上海振華重工(集團(tuán))股份有限公司 上海 200125
0 引言
目前,隨著起重機(jī)自動化程度越來越高,用戶對于起重設(shè)備的裝卸效率也越來越重視。在日趨成熟的起重機(jī)自動化領(lǐng)域,帶有回轉(zhuǎn)機(jī)構(gòu)的起重機(jī)鋼絲繩負(fù)載搖擺問題仍然是起重機(jī)作業(yè)面臨的一個難題。如何抑制負(fù)載搖擺,如何基于現(xiàn)有電控硬件,在不增加硬件的基礎(chǔ)上通過軟件實(shí)現(xiàn)低成本、高效率的防搖功能,是一項(xiàng)非常值得研究的課題。本文對回轉(zhuǎn)負(fù)載進(jìn)行建模、仿真,開發(fā)了基于單機(jī)電控貝加萊PLC 及ABB ACS880 變頻器,在不增加任何硬件設(shè)備的基礎(chǔ)上實(shí)現(xiàn)了回轉(zhuǎn)機(jī)構(gòu)的防搖功能。
1 模型分析
回轉(zhuǎn)機(jī)構(gòu)負(fù)載及鋼絲繩可看作一個單擺系統(tǒng),如圖1 所示。以O(shè)點(diǎn)(回轉(zhuǎn)手柄給定停止位)作直角坐標(biāo)系,x正方向?yàn)榛剞D(zhuǎn)向前方向,y正方向向上。回轉(zhuǎn)運(yùn)行到(d,0)位置時(shí),負(fù)載位置為(x,y),擺動角度為θ,繩長為l,負(fù)載質(zhì)量為m,重力加速度g。
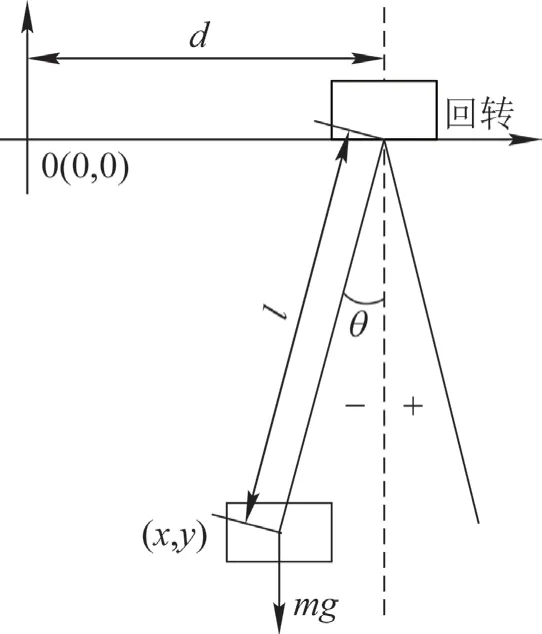
圖1 運(yùn)動坐標(biāo)
由圖1 可得
負(fù)載在x、y方向上的速度分量為對上述兩式求導(dǎo)所得。
式中:Vt為小車的速度。
負(fù)載勢能為
負(fù)載動能為
拉格朗日函數(shù)為
擺動角度θ的拉格朗日方程為
整理得到小車負(fù)載的動態(tài)模型為
化簡得
進(jìn)行平面分析得到負(fù)載擺動周期為
綜上所述可知,擺動周期與擺動長度有關(guān),與負(fù)載質(zhì)量無關(guān),對回轉(zhuǎn)施加恒定加速度后,負(fù)載將回到起始狀態(tài)。
2 仿真實(shí)驗(yàn)
仿真1:如圖2、圖3 所示,在固定繩長的回轉(zhuǎn)負(fù)載施加一個恒定加速度,回轉(zhuǎn)速度從0 r/min 加速至496 r/min,并勻速運(yùn)行,再以同樣的減速度,在一個周期T內(nèi)減速到0 r/min,仿真結(jié)果如圖2 所示,負(fù)載擺動角度θ在回轉(zhuǎn)加速由小變大再由大變小,勻速時(shí)θ為0°,如圖2 所示。
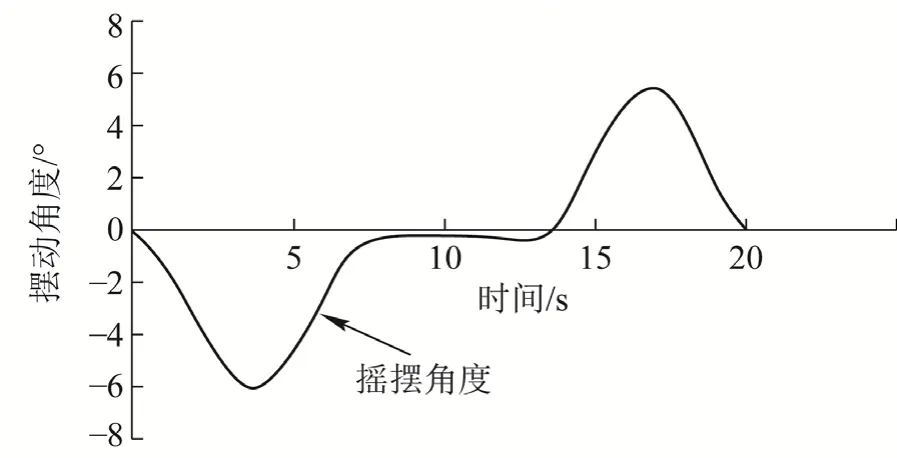
圖2 回轉(zhuǎn)單段加速擺動角度
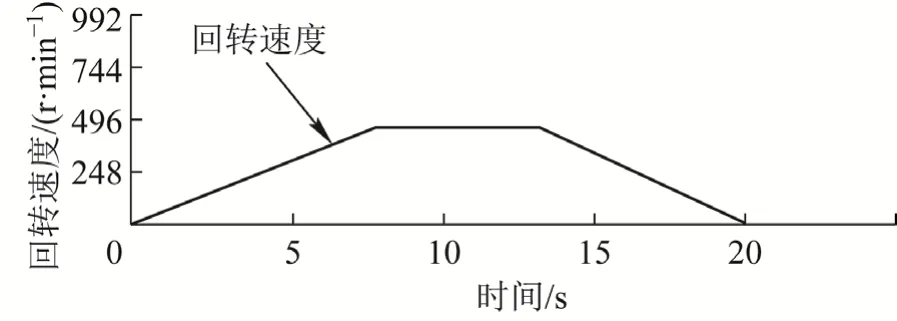
圖3 回轉(zhuǎn)單段加速
仿真2:如圖4 所示,在和仿真1 同樣繩長的條件下,回轉(zhuǎn)在前1/4 周期進(jìn)行加速,到達(dá)給定速度一半后進(jìn)行勻速運(yùn)行,并在到達(dá)1/2 周期時(shí),以相同的加速度再加速1/4 周期,達(dá)到全速后,再保持給定速度繼續(xù)運(yùn)行。
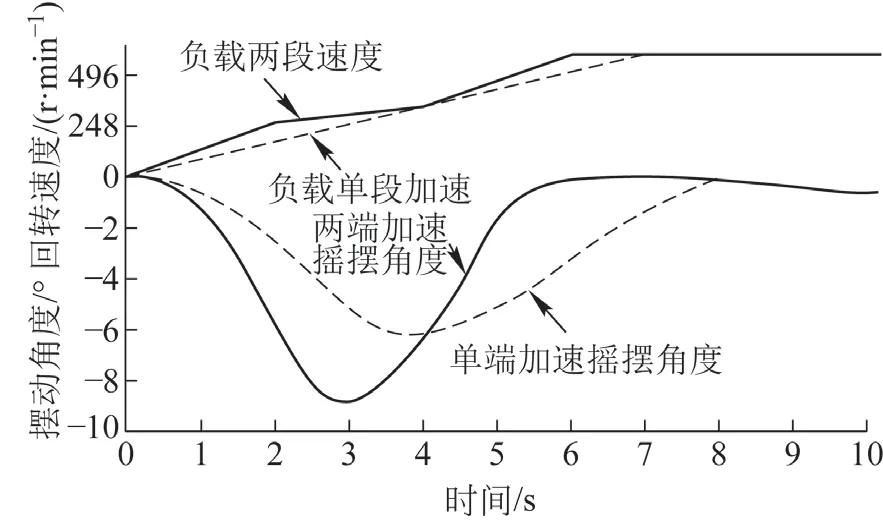
圖4 回轉(zhuǎn)兩段加速
通過仿真1 和仿真2 的對比可以看出,負(fù)載兩段加速較單段加速而言,大大抑制了回轉(zhuǎn)擺動周期,擺動時(shí)長由8 s 縮減至5 s,提高了回轉(zhuǎn)的作業(yè)效率,無效擺動周期減少3 s。
因此,基于理論計(jì)算、仿真、兩段加速抑制負(fù)載擺動是一種理想的防搖模型,為負(fù)載的運(yùn)行規(guī)律防搖系統(tǒng)的提供了理論依據(jù)。
3 防搖系統(tǒng)
3.1 起重機(jī)系統(tǒng)總體介紹
在仿真1 和仿真2 實(shí)驗(yàn)的基礎(chǔ)上,論證了回轉(zhuǎn)兩段加速防搖功能的可行性,在此基礎(chǔ)上,本文開發(fā)一套回轉(zhuǎn)防搖系統(tǒng)(見圖5),該系統(tǒng)由貝加萊X20 系列PLC 作為主控制器,該系列PLC 能滿足廣泛的應(yīng)用需求,不僅適用于標(biāo)準(zhǔn)應(yīng)用同時(shí)能滿足相對苛刻的應(yīng)用要求。循環(huán)周期可達(dá)200 μs,滿足回轉(zhuǎn)起重機(jī)防搖功能的時(shí)間周期。
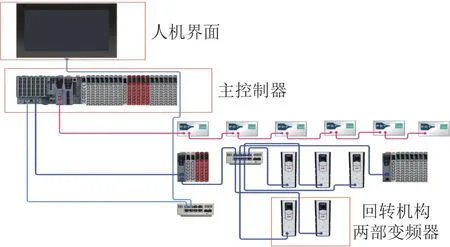
圖5 回轉(zhuǎn)起重機(jī)電控主系統(tǒng)
X20 模塊分別由底板模塊、電氣模塊、端子排模塊3 部分組成,確保了在整個電控系統(tǒng)的使用過程中各模塊的簡單化、模塊化;X20 系列的PLC 具有眾多的優(yōu)勢,1)對于不同種類電氣設(shè)備具有不同類型的配置,X20底板模塊是眾多設(shè)備類型的基本平臺,用戶可以根據(jù)不同的電氣設(shè)備種類選擇不同的電氣模塊,軟件可以自動識別每個卡槽所使用的電氣模塊,然后提供相應(yīng)的設(shè)備功能。2)工業(yè)配電柜架構(gòu),X20 端子排模塊與電氣模塊互相分離,使得系統(tǒng)接線更加合理,布局更加清晰,是批量生產(chǎn)電氣設(shè)備較好的選擇。3)易于維護(hù)、維修,X20 易更換的特性可簡化排除故障的過程,電氣模塊可在運(yùn)行過程中更換損壞的模塊,由于端子排獨(dú)立的特性,接線維持原樣,則整個系統(tǒng)可更快地更換自動化元件以減少設(shè)備的停機(jī)時(shí)間。
電氣系統(tǒng)所搭載的ABB ACS880 系列變頻器是應(yīng)用較廣泛的變頻器之一,其適用于各種工藝,自動化系統(tǒng),滿足幾乎任何行業(yè)電動機(jī)驅(qū)動應(yīng)用的需求。
通訊采用貝加萊專用的Powerlink 通訊協(xié)議,可與變頻器之間進(jìn)行數(shù)據(jù)交換,該通訊方式是一種以標(biāo)準(zhǔn)以太網(wǎng)為物理介質(zhì)的通訊方式,解決工業(yè)控制及數(shù)據(jù)采集領(lǐng)域數(shù)據(jù)傳輸實(shí)時(shí)性的最新技術(shù),該通訊相對于傳統(tǒng)的Modbus,Profibus DP 等通訊方式而言,Powerlink 具有通訊更快、更穩(wěn)定的特點(diǎn)和優(yōu)勢。
回轉(zhuǎn)起重機(jī)的主系統(tǒng)包含人機(jī)界面、主控制器、支持變頻器、回轉(zhuǎn)1 號變頻器、回轉(zhuǎn)2 號變頻器、開閉變頻器、電纜卷盤變頻器等組成,所有變頻器與主控制器采用Powerlink 通訊方式。
司機(jī)室配有遠(yuǎn)程IO 站和HMI(司機(jī)室觸摸屏),各機(jī)構(gòu)均設(shè)有絕對值編碼器,司機(jī)室HMI 使用EtherNET 通訊。
該主控系統(tǒng)配備了起重機(jī)管理系統(tǒng)(CMS),其硬件基于觸摸屏,顯示尺寸在15 in 以上,具備1 GB 存儲空間。起重機(jī)管理系統(tǒng)通過以太網(wǎng)與PLC 連接進(jìn)行交換數(shù)據(jù)。顯示屏上能夠顯示機(jī)構(gòu)所有的運(yùn)行數(shù)據(jù),卷筒的轉(zhuǎn)速、起升高度、變幅角度、載荷質(zhì)量;各個機(jī)構(gòu)的限位狀態(tài),例如減速、停止的位置;電動機(jī)的實(shí)時(shí)運(yùn)行狀態(tài),例如電動機(jī)的電壓、電動機(jī)電流、電動機(jī)力矩的情況;該系統(tǒng)可以顯示故障報(bào)警及其歷史記錄,可以根據(jù)歷史記錄對設(shè)備進(jìn)行性能安全評估,排除設(shè)備的隱患,防患于未然;具有專用的調(diào)試界面,現(xiàn)場調(diào)試時(shí)允許具有修改權(quán)限的人員在登錄后修改運(yùn)行設(shè)定參數(shù)。此外,還具備起重機(jī)管理系統(tǒng)的數(shù)據(jù)記錄功能,將需要采樣的數(shù)據(jù)進(jìn)行設(shè)置,按照設(shè)定的時(shí)間間隔記錄到文件,供起重機(jī)維護(hù)管理時(shí)查詢。
本文著重介紹回轉(zhuǎn)起重機(jī)的回轉(zhuǎn)防搖系統(tǒng),即2 部回轉(zhuǎn)變頻器在防搖功能中的應(yīng)用,以及變頻器與主控制器之間回轉(zhuǎn)實(shí)時(shí)狀態(tài)在人機(jī)畫面的回轉(zhuǎn)界面中體現(xiàn)。
3.2 回轉(zhuǎn)防搖控制系統(tǒng)
回轉(zhuǎn)機(jī)構(gòu)的防搖控制系統(tǒng)(見圖6),通過手柄給定速度至貝加萊主控制器,主控制器中的擺動周期功能塊,通過編碼器計(jì)算出的擺動長度l,從而得到擺動周期,擺動周期功能塊(見圖7)的輸出值擺動周期,作為兩段防搖功能塊(見圖8)的輸入?yún)?shù),再通過主控制器得到的給定速度,以及變頻器讀到的實(shí)際速度,結(jié)合仿真實(shí)驗(yàn)2 的結(jié)果,通過兩段防搖功能塊計(jì)算得出兩段加速時(shí)的輸出轉(zhuǎn)速,結(jié)合仿真實(shí)驗(yàn)2(見圖3),以TP/2 的加速度時(shí)間運(yùn)行1/4 周期,再以半速運(yùn)行1/4 周期,最后再以TP/2 的加速度時(shí)間至給定速度,從而達(dá)到防搖效果。同時(shí),在回轉(zhuǎn)機(jī)構(gòu)運(yùn)行過程中,電動機(jī)編碼器將實(shí)時(shí)速度反饋至主控制器,實(shí)現(xiàn)安全可靠的閉環(huán)控制。該防搖功能不僅僅運(yùn)用于回轉(zhuǎn)機(jī)構(gòu)啟停工作狀態(tài)中的防搖,在實(shí)時(shí)變速作業(yè)工作中,通過給定轉(zhuǎn)速和實(shí)際轉(zhuǎn)速的實(shí)時(shí)變化分析,從而形成回轉(zhuǎn)全過程防搖功能。

圖7 擺動周期功能塊

圖8 兩段防搖功能塊
防搖功能塊涉及較多數(shù)學(xué)運(yùn)算,主要包括判斷回轉(zhuǎn)機(jī)構(gòu)的加減速狀態(tài),給定值得變化狀態(tài)。該控制系統(tǒng)采用ST 語言編寫邏輯,采用FBD 功能塊進(jìn)行封裝,標(biāo)準(zhǔn)化的設(shè)計(jì)理念,可應(yīng)用于各種電控系統(tǒng)中。
3.3 功能實(shí)現(xiàn)
在貝加萊主控制器的PLC 主程序中,增加和防搖功能相關(guān)的2 個功能塊,擺動周期功能塊可以計(jì)算得出回轉(zhuǎn)擺動周期,兩段防搖功能塊計(jì)算得出回轉(zhuǎn)機(jī)構(gòu)的加減速時(shí)間并傳送到變頻器中,從而實(shí)現(xiàn)回轉(zhuǎn)防搖功能,本文介紹的回轉(zhuǎn)起重機(jī)防搖功能是在不增加任何硬件設(shè)備成本的基礎(chǔ)上實(shí)現(xiàn)回轉(zhuǎn)防搖功能。
3.3.1 功能塊
該功能塊(見圖7)根據(jù)實(shí)時(shí)擺長計(jì)算得出擺動周期的理論值,Gravity 為重力加速度取9.8 m/s2;Length 為擺動繩長,根據(jù)起升機(jī)構(gòu)絕對值編碼器計(jì)算;Factor 為因數(shù),取6.28,可根據(jù)實(shí)際情況微調(diào);SwingCycleTime 為計(jì)算得出的擺動周期。
通過大機(jī)自帶的起升絕對值編碼器可以計(jì)算得出回轉(zhuǎn)的擺動長度,擺動周期根據(jù)負(fù)載擺動周期公式可以計(jì)算得出,同時(shí)作為回轉(zhuǎn)兩段加速的加速度時(shí)間依據(jù)。該擺動周期時(shí)間作為兩段加速防搖的周期。
兩段防搖功能塊(見圖8)執(zhí)行回轉(zhuǎn)機(jī)構(gòu)兩段加速功能,通過輸入引腳中的SlewingSpeed(回轉(zhuǎn)速度0 ~100%),CycleTime( 擺動周期),ReferenceSpeed(給定速度),ActualSpeed(實(shí)際速度),分析計(jì)算得出變頻器的輸出轉(zhuǎn)速(OutSpeed),回轉(zhuǎn)的加減速時(shí)間(AccTime、DecTime)等關(guān)鍵參數(shù)給2 個回轉(zhuǎn)變頻器。該功能塊可以計(jì)算得出兩段防搖的速度給定值,回轉(zhuǎn)加減速時(shí)間。FaultReset(故障復(fù)位)引腳,當(dāng)加減速時(shí)間低于回轉(zhuǎn)加減速安全時(shí)間時(shí),功能塊輸出AccDecTimeFault(加減速時(shí)間故障),用來保護(hù)回轉(zhuǎn)機(jī)構(gòu),具體實(shí)現(xiàn)為當(dāng)回轉(zhuǎn)前1/4 周期進(jìn)行2 倍于單段加速度時(shí)間的加速度進(jìn)行加速,當(dāng)達(dá)到給定速度的半速時(shí),以半速運(yùn)行1/4 周期,再以2 倍的單段加速度加速至手柄給定速度,達(dá)到全速后,保持勻速運(yùn)行。
該功能塊通過輸入/輸出引腳的參數(shù)變化,可將各參數(shù)傳輸至司機(jī)室觸摸屏以及CMS,方便觀察防搖系統(tǒng)工作中的各參數(shù)變化。
3.2.2 變頻器中參數(shù)設(shè)置
通訊及參數(shù)配置在ABB Drive Composer 中完成,Drive Composer 是支持ABB 通用架構(gòu)變頻器的一款啟動和維護(hù)工具。該工具用于查看和設(shè)置變頻器參數(shù),并對設(shè)備性能進(jìn)行監(jiān)測和調(diào)試,集成參數(shù)設(shè)置,波形拍攝等實(shí)用功能。
在51 組參數(shù)設(shè)置變頻器通訊參數(shù)。
51.1 設(shè)置為ETH Pwrlink,表示為主PLC 與變頻器之間的通訊協(xié)議powerlink;
51.2 設(shè)置為基于ABB Drivers 驅(qū)動協(xié)議;
51.3 設(shè)置地址,與貝加萊硬件配置站點(diǎn)對應(yīng),該項(xiàng)目地址設(shè)置為2;
51.4 設(shè)置為99;
51.5,51.6 設(shè)置為MIDX,代表通訊介質(zhì)是雙絞以太網(wǎng)線;
51.31 通訊狀態(tài)顯示為online,即變頻器與貝加萊主PLC 通訊完成(見圖9)。

圖9 ABBACS880 變頻器通訊參數(shù)設(shè)置
回轉(zhuǎn)變頻機(jī)的固件基于N5050 起重機(jī)宏,該固件可以通過PowerLink 通訊協(xié)議實(shí)時(shí)修改變頻器的加減速時(shí)間,該參數(shù)在23.201,23.202 中實(shí)現(xiàn)(見圖10)。

圖10 ABB 加減速時(shí)間參數(shù)設(shè)置
相應(yīng)的在貝加萊AS 軟件中對應(yīng)配置ABB ACS880變頻器中所應(yīng)用的參數(shù)通道,與變頻器實(shí)現(xiàn)參數(shù)交換(見圖11)。
貝加萊AS 軟件中配置ABB ACS880 變頻器硬件和參數(shù),ABB 變頻器屬于第三方設(shè)備,在ABB 官網(wǎng)上可以下載配置文件,進(jìn)行配置,并選用需要參數(shù)的通道,使貝加萊與ABB 變頻器之間建立通訊連接(見圖12)。

圖12 貝加萊AS 硬件配置
4 系統(tǒng)優(yōu)勢
本文介紹的回轉(zhuǎn)起重機(jī)防搖功能有別于傳統(tǒng)的回轉(zhuǎn)起重機(jī)防搖功能,其系統(tǒng)的優(yōu)勢在于:
1)成本低 傳統(tǒng)防搖系統(tǒng)需要添加攝像頭、反射板、角度傳感器等價(jià)格高昂的硬件設(shè)備,采購成本及維護(hù)成本較高,本系統(tǒng)防搖無需增加硬件設(shè)備,通過軟件實(shí)現(xiàn)防搖功能。
2)改造周期短 對于舊設(shè)備的防搖改造,改造周期是用戶非常關(guān)心的問題,在幾乎24 h 作業(yè)的碼頭設(shè)備上進(jìn)行改造,越短的改造周期可以最大程度減少碼頭的停工時(shí)間,本系統(tǒng)由于無硬件增加,大大降低了改造時(shí)間。
3)標(biāo)準(zhǔn)化、模塊化的設(shè)計(jì)理念 本系統(tǒng)程序編寫采用FCB 功能塊封裝,邏輯清晰,用戶只需在輸入端添加相應(yīng)參數(shù),即可實(shí)現(xiàn)防搖功能,該功能塊即插即用,適用于各類回轉(zhuǎn)起重機(jī),因?yàn)闆]有硬件的添加,只需要在原有程序上添加開發(fā)的擺動周期功能塊以及兩段防搖功能塊即可實(shí)現(xiàn)防搖功能,低成本,綠色環(huán)保的特性讓該防搖功能具有很大的推廣價(jià)值。
4)應(yīng)用范圍廣 目前該功能已在門座起重機(jī)和移動式回轉(zhuǎn)起重機(jī)上得到實(shí)驗(yàn),效果良好,完全可以應(yīng)用到其他回轉(zhuǎn)起重機(jī)中。
5 總結(jié)
本文對回轉(zhuǎn)起重機(jī)設(shè)備中的回轉(zhuǎn)機(jī)構(gòu)負(fù)載進(jìn)行研究。首先通過數(shù)學(xué)建模建立回轉(zhuǎn)機(jī)構(gòu)運(yùn)動模型。通過仿真實(shí)驗(yàn)實(shí)現(xiàn)防搖控制效果通過單段加速及兩段加速進(jìn)行驗(yàn)證。得到兩段可以很好地縮短回轉(zhuǎn)機(jī)構(gòu)擺動周期,將兩段防搖加速作為防搖功能的理論依據(jù),并對其進(jìn)行軟件設(shè)計(jì)。
理論驗(yàn)證之后,搭建基于貝加萊主控制器以及ABB ACS880 變頻器作為控制核心的控制系統(tǒng),配合貝加萊6PPT50 系列上位機(jī),通過工業(yè)以太網(wǎng)PowerLink組網(wǎng)通訊。通訊采用貝加萊PLC+遠(yuǎn)程IO 的方式,遠(yuǎn)程IO 和變頻器系統(tǒng)采用現(xiàn)場總線技術(shù)進(jìn)行通訊。
起重機(jī)的管理系統(tǒng)(CMS)能夠記錄和提示報(bào)警信息,參數(shù)設(shè)定,顯示起重機(jī)運(yùn)行的參數(shù),并且能夠記錄起重機(jī)的操作記錄用以數(shù)據(jù)分析。
在不增加硬件設(shè)備即做到精準(zhǔn)防搖控制,該系統(tǒng)成功應(yīng)用到移動式回轉(zhuǎn)起重機(jī),門座起重機(jī)等設(shè)備。該系統(tǒng)配置靈活,無外部安裝設(shè)備,維護(hù)方便,可運(yùn)用于不同的電控系統(tǒng),應(yīng)用范圍廣泛。
猜你喜歡
中華詩詞(2022年6期)2022-12-31 06:41:24
工業(yè)設(shè)計(jì)(2022年8期)2022-09-09 07:43:20
軍民兩用技術(shù)與產(chǎn)品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
防爆電機(jī)(2020年3期)2020-11-06 09:07:42
測控技術(shù)(2018年5期)2018-12-09 09:04:50
家庭影院技術(shù)(2017年9期)2017-09-26 03:41:45
中國科技論壇(2017年7期)2017-07-25 08:49:53
電子制作(2017年7期)2017-06-05 09:36:13
中國中醫(yī)藥現(xiàn)代遠(yuǎn)程教育(2014年22期)2014-03-01 04:32:55
- 起重運(yùn)輸機(jī)械的其它文章
- 3D 打印定制拖鏈支架,讓拖鏈運(yùn)輸更輕松、更安全
- 轉(zhuǎn)向電動機(jī)與舵輪異軸的自動導(dǎo)引叉車轉(zhuǎn)向檢測機(jī)構(gòu)設(shè)計(jì)
- 基于3D 視覺的機(jī)器人坡口切割站系統(tǒng)設(shè)計(jì)
- 基于形狀記憶合金驅(qū)動的運(yùn)輸機(jī)器人設(shè)計(jì)*
- 基于C/S 架構(gòu)的醫(yī)廢調(diào)度系統(tǒng)的設(shè)計(jì)與實(shí)現(xiàn)
- 基于Ansys Workbench 的平頭塔式起重機(jī)臂架結(jié)構(gòu)優(yōu)化分析