基于感性工學與層次分析法的下肢康復機器人造型設計
2023-09-19 09:31:56孫鳳傲段金娟
工業設計 2023年8期
孫鳳傲 段金娟
(1.天津工業大學機械工程學院,天津 300387;2.北京社會管理職業學院婚禮文化與傳媒藝術學院,北京 102600)
隨著人口老齡化時代的到來,腦卒中、帕金森、心腦血管硬化等疾病導致的老年人下肢運動功能障礙頻發,老年人對運動功能康復的需求也越來越大,下肢康復機器人作為下肢康復輔具受到了關注[1]。目前下肢康復機器人的研究主要在控制設計、結構設計、人機交互方面,如李勇等[2]結合臨床步態數據與人體步態,對下肢康復機器人的運動軌跡進行規劃,搭建了控制系統平臺。陳哲銘等[3]提出一種6自由度的下肢康復機器人,針對下肢關節損傷的個體差異,提出了一種關節軌跡方法。趙航[4]為提高下肢運動功能障礙患者的積極性,利用虛擬現實技術構建虛擬城市漫游場景,加強了患者在康復時的沉浸感。目前對于下肢康復機器人的研究主要集中在功能與交互設計上,對造型設計方面的研究較少,忽視了患者的心理需求,對患者的感性需求的研究不充分,降低了患者康復的積極性。文章提出一種基于感性工學與層次分析法的下肢康復機器人造型設計,通過量化的方法獲取用戶對于下肢康復機器人的感性需求,利用層次分析法對下肢康復機器人的感性意象重要性進行評估,建立下肢康復機器人感性意象映射模型,獲取最優類目組合指導下肢康復機器人的造型設計,為康復類產品的造型設計尋求更新更多的可行性。
1 感性工學與層次分析法
感性工學一詞最早由山本健一在1956 年提出[5]。之后日本學者長町三生發表了一系列有關感性工學的論文和著作,奠定了感性工學理論基礎[6-8]。感性工學主要通過定性和定量的方法把人們模糊不清、難以確定和捕捉的感性意象轉換為定量的數據,并對量化之后的數據進行分析以此來指導設計實踐。
層次分析法是一種以定性和定量研究相結合的決策分析法[9]。近些年,層次分析法被廣泛應用產品的造型設計,機械結構設計等研究領域。如段金娟[10]等人通過對紡織機械進行分析,運用層次分析法獲取部件對整體形態的貢獻度,指導設計實踐,并建立層次評價模型對方案評估,獲得最佳方案。
2 基于感性工學的下肢康復機器人感性意象獲取
2.1 產品代表性感性詞匯收集與篩選
首先,為獲取用戶對下肢康復機器人的情感偏好,通過相關文獻、論壇網站、產品宣傳手冊等途徑廣泛搜集有關下肢康復機器人的感性詞匯,初步搜集到80 個感性意象詞。其次,邀請5 名具有五年以上工業設計經驗的設計師組成專家小組1,針對下肢康復機器人的造型特點,對80 個感性意象詞匯進行篩選。去除詞匯意思相似以及無法準確描繪產品特征的詞匯,共得到30 個感性意象詞匯,并對感性意象詞匯進行反義詞配對,用于語義差異量表的構建。再次,邀請下肢運動功能障礙患者10 名,從事肢體康復的醫師5 名和工業設計師5 名,共20 名被測人員。采用線上調查問卷的方式,從表中30 組感性意象詞匯對中篩選出6 組能體現下肢康復機器人造型特征的感性意象詞匯對。最后,根據問卷數據結果,安全的—危險的、易用的—難用的、科技的—傳統的、舒適的—不適的、輕巧的—笨拙的、柔和的—堅硬的6 組詞被選頻率較高,最終選擇這6 組感性意象詞匯對作為代表性樣本的感性意象詞匯對。
2.2 產品代表性樣本收集與篩選
通過查閱下肢康復機器人相關的文獻資料,瀏覽產品官網、宣傳畫冊、市場調研等途徑,搜集下肢康復機器人的樣本圖片。邀請5 位具有五年以上工業設計經驗人員組成專家小組2,結合KJ 法[11]對下肢康復機器人的樣本圖片進行篩選,剔除形態差異較小,畫面不清晰、畫面角度無法體現產品特征的樣本,最終得到了27 張代表性樣本圖片。為了避免顏色、品牌、材料對感性造型研究的影響,對代表性樣本圖片進行去背景、去色、去LOGO 等圖像處理,如圖1 所示。

圖1 下肢康復機器人代表性樣本
3 基于層次分析法的下肢康復機器人感性意象評估
為有效獲取用戶對下肢康復機器人的感性意象評價,運用語義差分法,將6 組代表性感性意象感性詞匯對與27 個代表性樣本相結合,采用1—7 分值李克特量表制作下肢康復機器人造型感性意象評估調查問卷,如圖2 所示。采用線上問卷的調查方式,共邀請被測者30 名進行線上評估。其中,具有設計經驗的設計師10 名,從事肢體康復工作的康復醫師10 名,下肢運動功能障礙患者10 名,通過自身的印象對代表性樣本圖片進行打分。發放問卷30 份,回收有效問卷30 份。計算各代表性樣本在各感性維度下的平均分值,統計值如表1 所示。
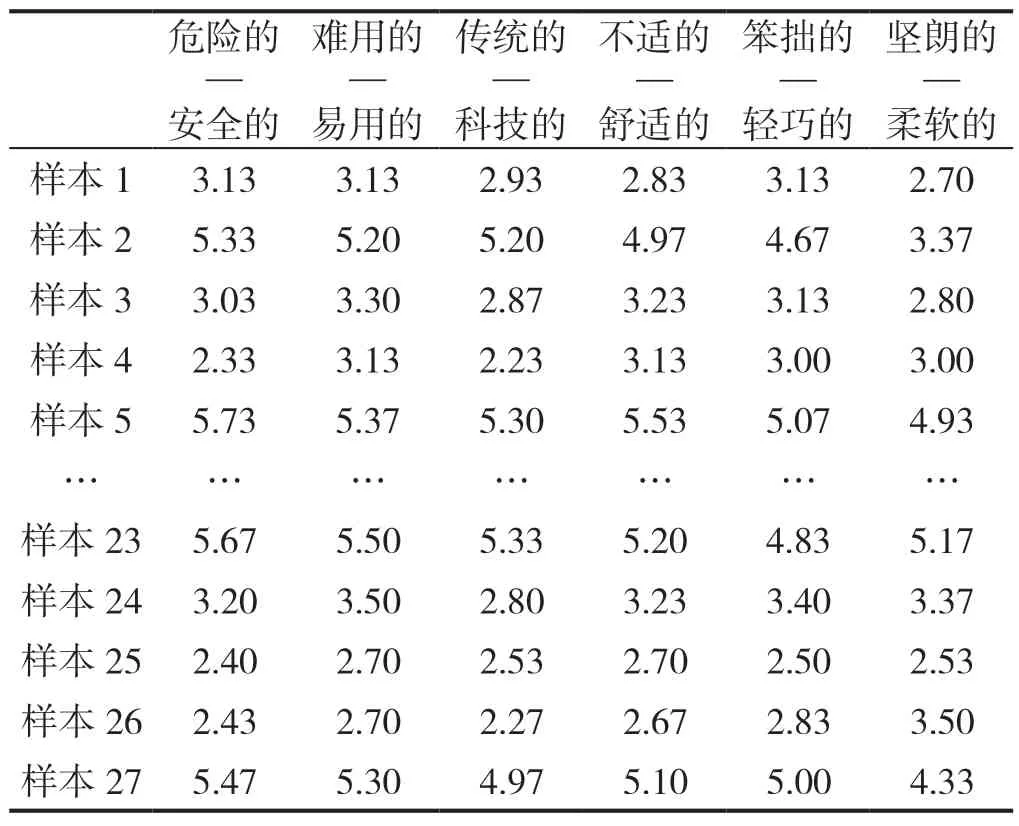
表1 下肢康復機器人代表性樣本的感性意象均值
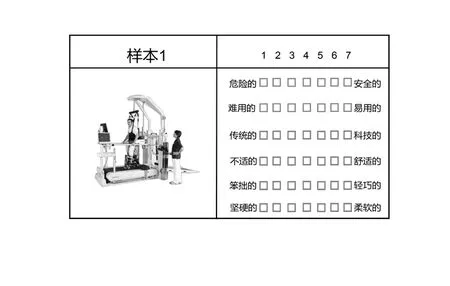
圖2 調查問卷示意圖
滿足用戶的多個感性意象需求,需要對多個意象維度進行分析,獲取綜合感性意象評分。采用層次分析法,構建下肢康復機器人造型意象層次結構模型。對各代表性感性意象詞匯進行重要性評估,得到其中設計中的權重。結合下肢康復機器人產品的特性,邀請專家小組對代表性感性意象詞匯采用1—9 標度的重要性判斷進行評估,將數據進行歸一化后得到各代表性感性意象詞匯的權重系數,如表2 所示。權重大小排名為,危險的—安全的、不適的—舒適的、難用的—易用的、堅硬的—柔軟的、笨拙的—輕巧的、傳統的—科技的。

表2 下肢康復機器人造型意象判斷矩陣
在得到各項指標的權重值后,需要進行一致性檢驗。計算可得CI=0.083 5,CR=0.067 3,CR<0.1,符合層次分析法中一致性檢驗要求,證明該層次結構模型較為合理。
將表中各代表性感性意象詞匯的權重系數與表中各代表性產品的感性意象均值相乘,得到加權后的各代表性樣本綜合感性意象分值,如表3 所示,為搭建后續產品感性意象映射模型提供數據基礎。

表3 下肢康復機器人代表性樣本綜合感性意象分值
4 下肢康復機器造型設計思路
4.1 產品樣本形態要素解構分析
為研究下肢康復機器人形態要素與感性意象之間的關系,需要分解對用戶感性認知影響較大的特征要素。運用形態分析法對代表性樣本圖片進行形態要素解構分析,下肢康復機器人可分解為主機、顯示屏、步行臺、扶手、機體支撐懸吊與下肢外骨骼6 個組成部分。對各代表性樣本圖片的6 個組成部分進行形態特征的描繪,將影響下肢康復機器人造型意象的主要組成部分設為項目,各組成部分的造型形態特征設為類目,共得到6 個項目、20 個設計類目。用英文字母A—G 表示機體支撐懸吊、扶手、步行臺、步行臺、顯示屏、主機與下肢外骨骼項目,用數字1—5 代表各組成部分的造型形態特征的類目,構建下肢康復機器人造型要素特征集,如表4 所示。
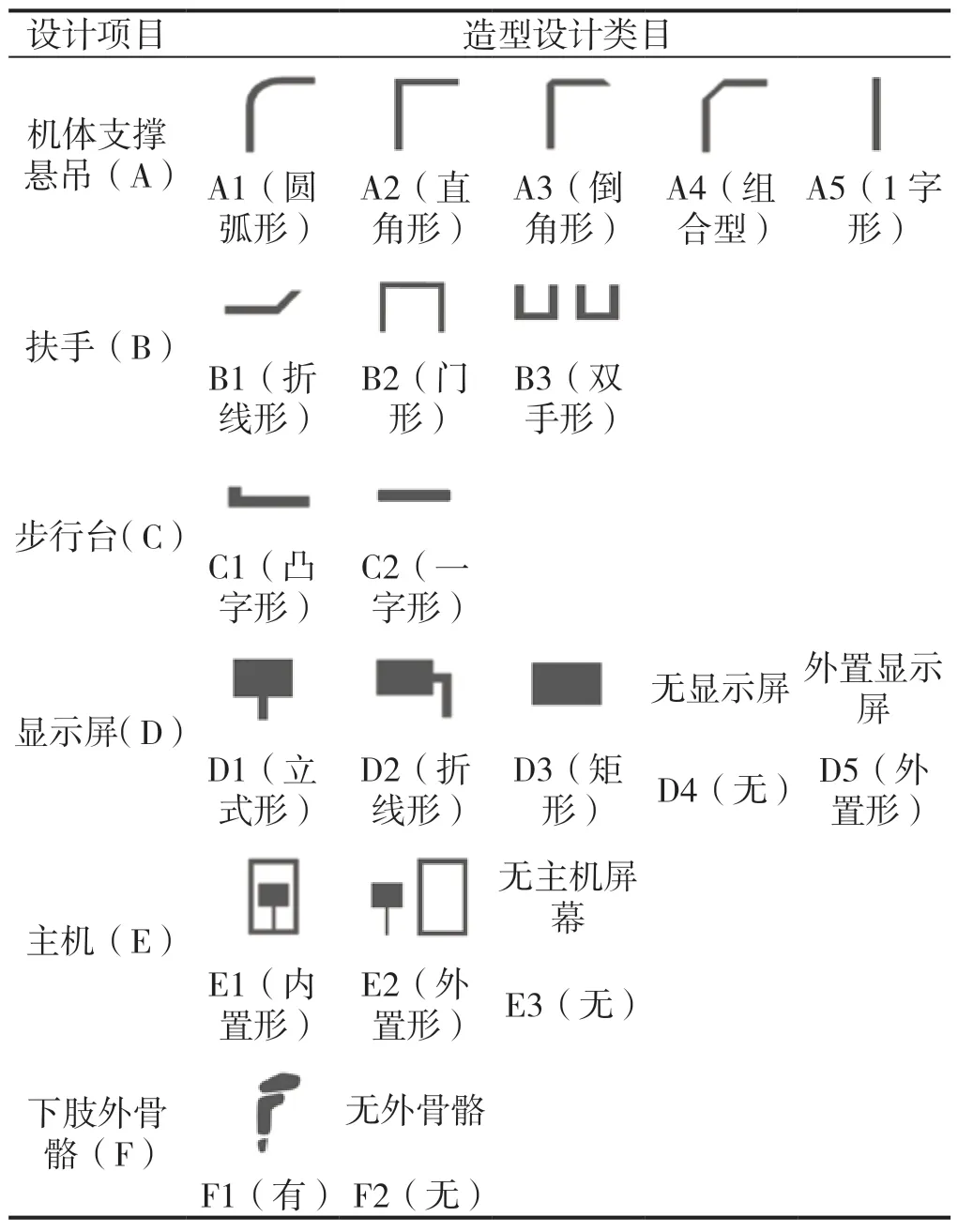
表4 下肢康復機器人造型要素特征集
結合類目劃分對27 個代表性樣本進行開關式編碼,將造型特征轉化為計算機語言,將定性的造型要素轉化定量數據,便于后續的深度神經網絡的計算。
4.2 產品感性意象映射模型搭建
采用含有兩層隱藏層的三層深度神經網絡構建下肢康復機器人感性意象造型神經網絡模型[12]。其輸入層有20 個神經元,分別對應下肢康復機器人的造型要素類目;輸出層的神經元為加權后各代表樣本綜合感性意象分值。將樣本數據隨機分為訓練集和測試集,其中20 個樣本數據為訓練集,7 個樣本數據為測試集。為保證模型的可行性,使用均方誤差作為訓練性能評估損失函數loss。為了防止數據過擬合,采用l2 正則化優化網絡架構,學習率為0.001。采用Adam 優化器,通過迭代訓練使其均方誤差MSE不斷降低。經過網絡參數的不斷迭代優化,訓練集和測試集誤差曲線趨向平穩,實驗結果如圖3 所示。在迭代80 輪后,測試集的均方差小于0.09,經過訓練后的模型在測試集的最終均方差為0.081,實際誤差為0.28,滿足設定條件。
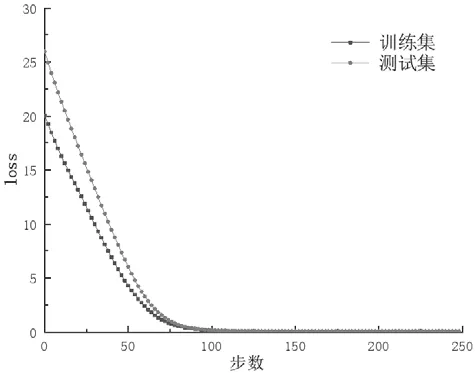
圖3 實驗訓練結果
為了獲取對應最高分值的最優類目要素組合,使用窮舉法,將下肢康復機器人的造型類目要素按照正交原則進行重新組合,共得到5×3×2×5×3×2=900 種方案,得到下肢康復機器人造型設計要素組合資源庫。使用上述深度神經網絡模型對900 種組合進行感性意象評價值的智能預測。排名第一的類目組合為{A1,B2,C1,D2,E1,F1},感性意象分值為6.11,被認定為是最佳的類目組合。將推薦類目作為設計實踐中項目造型輸入,滿足用戶的感性需求,為方案生成奠定基礎。
5 下肢康復機器人造型設計實踐
根據最佳類目組合{A1,B2,C1,D2,E1,F1}如表5 所示,進行造型設計實踐。
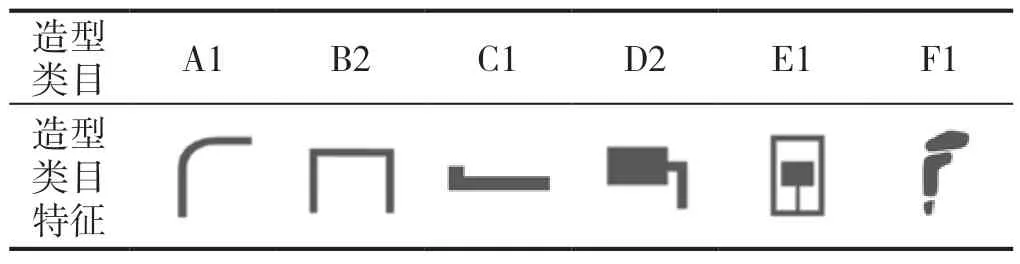
表5 最優造型特征類目組合
該款下肢康復機器人以安全、舒適、易用、柔軟、輕巧、科技為感性需求為基礎,進行造型設計。該產品造型比例協調,形態較為柔和,功能排布合理,色調采用暖色系,給患者帶來一種溫暖舒適的感覺。產品以白色為主色,深灰色與淡黃色為輔色。選擇醫療類產品常用的白色作為主色,能體現出下肢康復機器人的干凈、整潔,也能有效的降低患者的焦躁感。在產品中深灰色主要應用于產品的底部,增加產品的穩重感,讓產品看起來更加的協調,更具有安全感。滿足用戶對下肢康復人的感性需求與功能需求,如圖4 所示。
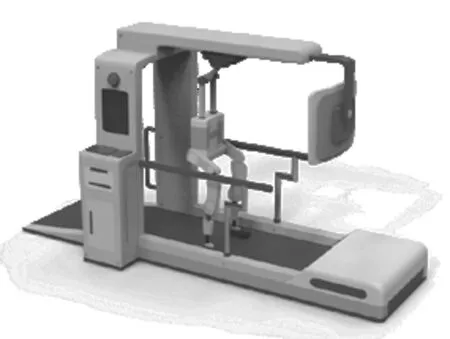
圖4 下肢康復機器人造型設計
6 結語
文章提出一種基于感性工學與層次分析法的下肢康復機器人造型設計方法,有效的解決了下肢康復機器人造型無法滿足用戶感性需求,提高患者康復積極性的問題。首先使用感性工學理論獲取用戶對下肢康復機器人的感性需求;其次運用層次分析法對下肢康復機器人感性需求進行重要性評估;最后構建下肢康復機器人感性意象模型,獲取最佳設計要素類目,指導設計實踐。滿足了用戶對下肢康復機器人的感性需求,驗證了基于感性工學與層次分析法的下肢康復機器人造型設計的可行性。
猜你喜歡
現代裝飾(2020年7期)2020-07-27 01:27:42
流行色(2020年1期)2020-04-28 11:16:38
廣東醫科大學學報(2020年6期)2020-02-06 06:00:56
藝術啟蒙(2018年7期)2018-08-23 09:14:18
特別健康(2018年2期)2018-06-29 06:13:44
海峽姐妹(2017年7期)2017-07-31 19:08:17
Coco薇(2017年5期)2017-06-05 08:53:16
中國衛生(2014年6期)2014-11-10 02:30:50
中國中醫藥現代遠程教育(2014年23期)2014-03-01 04:33:45
中國中醫藥現代遠程教育(2014年22期)2014-03-01 04:33:14
