某新型執(zhí)法裝備高海情下濾波算法研究
2023-09-21 08:17:24張曉鐸周曉波高亞軍
科學(xué)技術(shù)創(chuàng)新 2023年22期
張曉鐸,周曉波,連 帥,高亞軍
(鄭州機(jī)電工程研究所,河南 鄭州)
引言
中國海警是我國海上執(zhí)法機(jī)構(gòu),其任務(wù)包括海洋巡航、執(zhí)法監(jiān)管、應(yīng)急救援和海洋保護(hù)等,旨在維護(hù)國家主權(quán)和海洋利益,保障海上安全和秩序。
近年來,中國海警經(jīng)歷了高速發(fā)展,取得了顯著成績,在維護(hù)海洋權(quán)益、保護(hù)海洋環(huán)境和維護(hù)海上秩序等方面發(fā)揮了重要作用。通過加強(qiáng)裝備建設(shè)、技術(shù)創(chuàng)新和協(xié)同合作,不斷提升應(yīng)對復(fù)雜海情的能力和水平,為海上執(zhí)法和海洋權(quán)益保護(hù)作出積極貢獻(xiàn)。
2016 年6 月19 日,央視報道海警21115 艦訪問韓國,某新型執(zhí)法裝備工作畫面曝光,日前《艦載武器》也已經(jīng)刊登該新型執(zhí)法裝備列裝海警執(zhí)法船的照片。該型執(zhí)法裝備已經(jīng)成為海警執(zhí)法體系的重要組成。
海警船面對的海浪復(fù)雜情況是執(zhí)法行動中常見的挑戰(zhàn)之一。海浪的高度和周期的變化會對船舶的穩(wěn)定性產(chǎn)生重要影響,大浪和短周期的海浪可能導(dǎo)致船舶劇烈晃動和顛簸,增加操作風(fēng)險;海浪的方向和傾斜度也對船舶的穩(wěn)定性和航行性能產(chǎn)生影響,增加操縱難度;傾斜的海浪可能導(dǎo)致船舶在航行過程中不穩(wěn)定或產(chǎn)生滾動、顛簸等現(xiàn)象;海浪頻譜的復(fù)雜性可能導(dǎo)致非線性效應(yīng),如波浪的相互作用和波浪的非線性傳播,這些非線性特性可能導(dǎo)致海浪的形狀和能量分布變化,給船舶帶來額外的挑戰(zhàn),影響其穩(wěn)定性和航行性能。
在高海情搖擺情況下,安裝在甲板上的新型執(zhí)法裝備也會受到影響,如觀測設(shè)備的穩(wěn)定性降低,視野受限,難以準(zhǔn)確捕捉目標(biāo)信息和情報;設(shè)備的操作和維護(hù)困難,難以進(jìn)行精確的操作。這些因素會導(dǎo)致目標(biāo)瞄準(zhǔn)和精確拒止變得困難,導(dǎo)致新型執(zhí)法裝備工作穩(wěn)定性和精度受到影響。
濾波和預(yù)測算法研究對新型執(zhí)法裝備具有重要的工程指導(dǎo)意義。不僅能夠提高裝備的控制精度和穩(wěn)定性,確保裝備在復(fù)雜環(huán)境中的準(zhǔn)確操作和目標(biāo)追蹤,還能夠優(yōu)化裝備的性能和效率,提高工作效率和資源利用率。
1 濾波算法介紹
滑動窗口濾波通過保持最新一段時間內(nèi)的觀測數(shù)據(jù)并進(jìn)行濾波處理獲得對系統(tǒng)狀態(tài)的估計。最小二乘濾波基于最小化估計誤差平方和估計系統(tǒng)的狀態(tài)或參數(shù)。卡爾曼濾波器基于系統(tǒng)的動態(tài)模型和傳感器測量數(shù)據(jù),可以對系統(tǒng)的狀態(tài)進(jìn)行迭代更新和預(yù)測,具有較強(qiáng)的魯棒性。
文獻(xiàn)[1] 提出了一種基于滑動窗口長短期記憶(LSTM)網(wǎng)絡(luò)的船舶航跡預(yù)測方法,應(yīng)用LSTM網(wǎng)絡(luò)理論構(gòu)建了基于滑動窗口LSTM網(wǎng)絡(luò)的船舶航跡預(yù)測模型。文獻(xiàn)[2]針對序列圖像中非線性運(yùn)動目標(biāo)軌跡的預(yù)測問題, 提出了一種滑動窗口核嶺回歸運(yùn)動目標(biāo)軌跡預(yù)測算法。
文獻(xiàn)[3]通過對航跡所關(guān)聯(lián)若干點(diǎn)跡在一定時間、一定空間進(jìn)行最小二乘擬合,然后進(jìn)行航跡濾波。文獻(xiàn)[4]利用最小二乘法對分成3 段的曲線進(jìn)行船舶航行路線的擬合,建立擬合模型,提高了航跡模擬的精準(zhǔn)性。
文獻(xiàn)[5]對擴(kuò)展卡爾曼濾波器進(jìn)行改進(jìn),提出了自適應(yīng)變噪聲數(shù)學(xué)模型,并利用非線性互補(bǔ)濾波器對實驗結(jié)果進(jìn)行并行數(shù)據(jù)融合。文獻(xiàn)[6]設(shè)計了一種融合奇異值分解(SVD)和無跡卡爾曼濾波(UKF)的非線性動力定位狀態(tài)估計算法。文獻(xiàn)[7]考慮了系統(tǒng)噪聲和量測噪聲,提出了一種基于擴(kuò)展卡爾曼濾波器和滑模控制結(jié)合的復(fù)合控制算法。文獻(xiàn)[8]應(yīng)用自適應(yīng)魯棒UKF(ARUKF)算法和遺傳-UKF(GUKF)算法,建立了基于SQP 優(yōu)化的改進(jìn)UKF算法(SUKF),既保證了對準(zhǔn)精度,又提高了對準(zhǔn)速度。
綜上所述,滑動窗口濾波、最小二乘濾波和卡爾曼濾波在新型執(zhí)法裝備算法應(yīng)用上具有各自的應(yīng)用必要性。滑動窗口濾波適用于實時性要求較高、計算復(fù)雜度要求較低的場景。最小二乘濾波通過優(yōu)化性能和適應(yīng)非線性系統(tǒng),可提供高精度的狀態(tài)估計和目標(biāo)跟蹤。卡爾曼濾波器基于系統(tǒng)建模和魯棒性適應(yīng)性,可以實現(xiàn)對目標(biāo)的穩(wěn)定跟蹤,確保拒止控制的精度。
2 濾波算法設(shè)計
2.1 最小二乘濾波
勻速直線運(yùn)動最小二乘濾波公式如下:

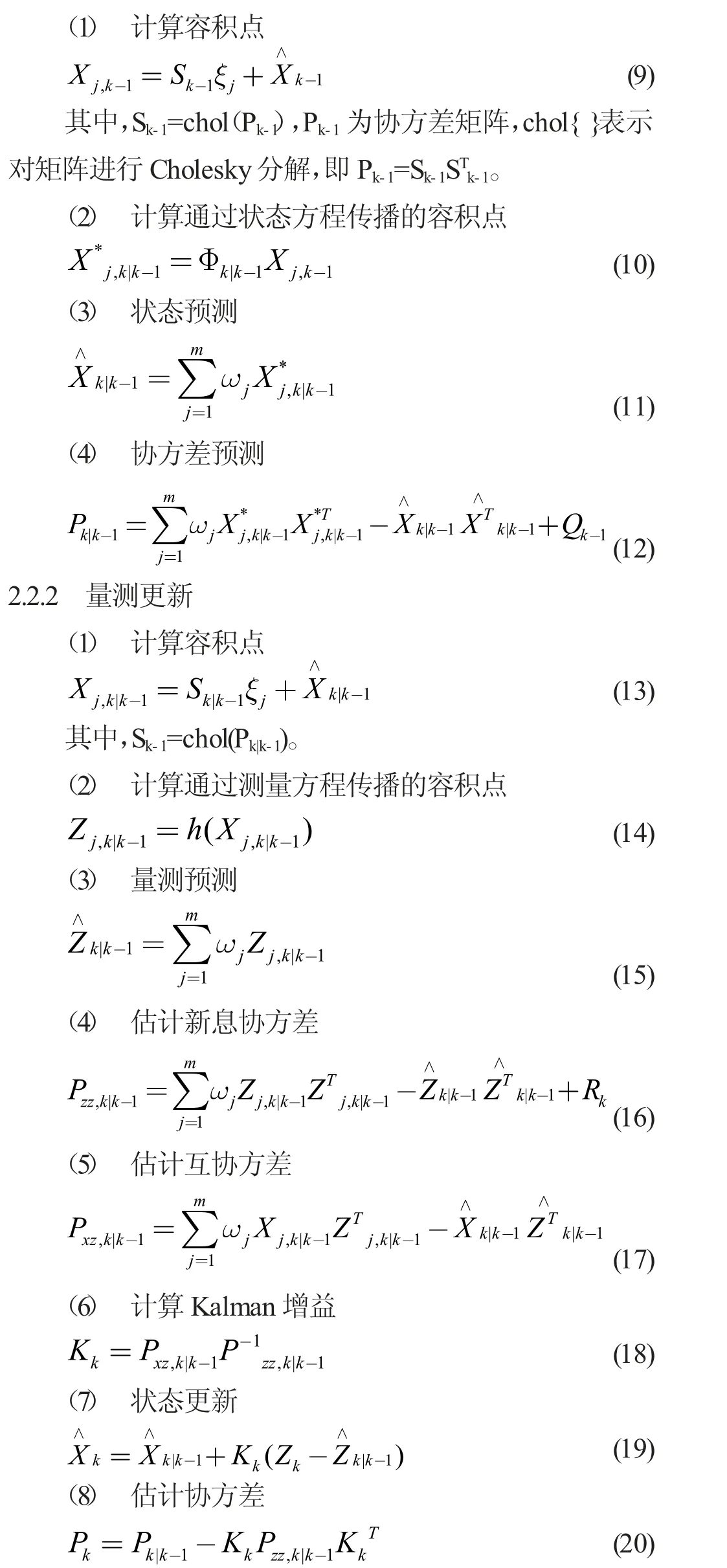
2.2 容積卡爾曼濾波(CKF)
容積卡爾曼濾波(CKF)算法處理流程如下:
2.2.1 時間更新
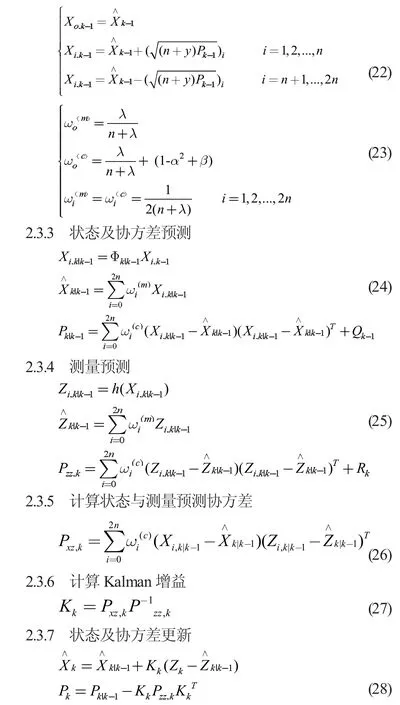
2.3 無跡卡爾曼濾波UKF
無跡卡爾曼濾波(UKF)算法的運(yùn)算流程如下:
2.3.1 狀態(tài)和協(xié)方差初始化
2.3.2 計算采樣點(diǎn)及其對應(yīng)權(quán)值
3 濾波算法仿真分析
3.1 搖擺條件下勻速目標(biāo)跟蹤預(yù)測
假設(shè)目標(biāo)航路捷徑50 m、高度20 m、起點(diǎn)在左側(cè)500 m,目標(biāo)以300 m/s 的速度向右勻速直線運(yùn)動。艦船橫搖幅值22.5°、周期5 s,縱搖幅值7.5°、周期5 s,搖擺值中加入均方根為0.01°的噪聲。分別對滑動CA、滑動CV、最小二乘CA、最小二乘CA、最小二乘CAA、卡爾曼CV、卡爾曼CA、UKFCV、UKFCA 和CKFCA 航跡預(yù)測算法進(jìn)行了仿真分析。
各種濾波效果統(tǒng)計如表1 所示。

表1 搖擺條件下勻速目標(biāo)跟蹤預(yù)測效果統(tǒng)計
在此種模型下,預(yù)測效果從好到壞的排序為:最小二乘CA、滑動窗口CV、最小二乘CAA、最小二乘CV、滑動窗口CA、UKFCA、UKFCV、標(biāo)準(zhǔn)卡爾曼CA、標(biāo)準(zhǔn)卡爾曼CV和CKFCA。圖1 為最小二乘CA 和CKFCA 預(yù)測誤差曲線對比。
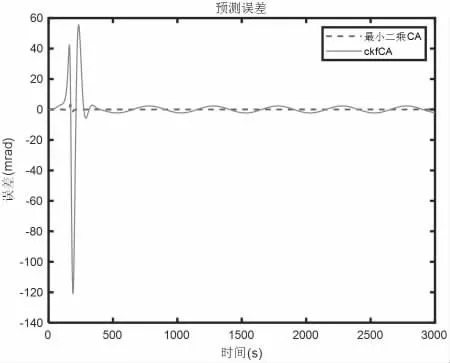
圖1 搖擺條件下勻速目標(biāo)跟蹤預(yù)測誤差對比曲線
3.2 噪聲對濾波效果的影響
假設(shè)目標(biāo)以300 m/s 的速度運(yùn)動,分別加入2 m、5 m 和10 m 的噪聲到理論值中,分別進(jìn)行仿真,不同的噪聲對濾波效果的影響見表2。
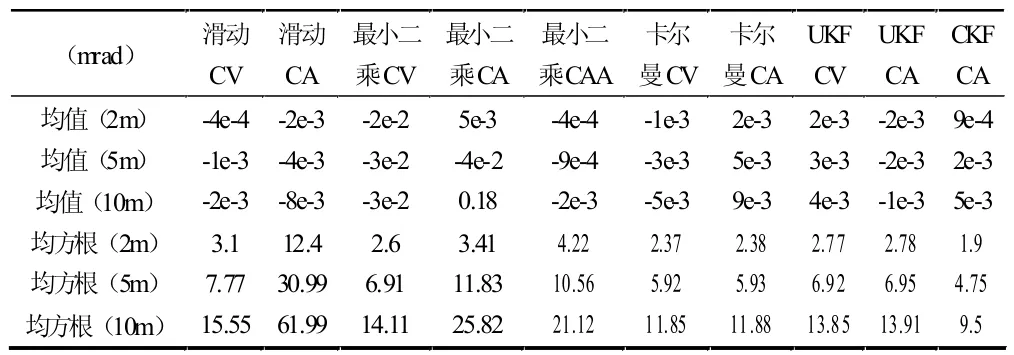
表2 勻速運(yùn)動模型下噪聲對濾波效果的影響分析
由表2 可以看出,在噪聲比較大的勻速運(yùn)動模型中,卡爾曼及其變種的濾波方法能取得較好的效果,并且隨著噪聲的增大,這種效果越來越明顯。其中,無跡卡爾曼濾波(UKF)表現(xiàn)得尤為突出,基本上是約等于噪聲的均方根。
假設(shè)目標(biāo)運(yùn)動是以振幅15°、周期4 s 的正弦方式運(yùn)動,分別加入0.01°、0.02°和0.05°的噪聲到理論值中,分別進(jìn)行仿真,不同的噪聲對濾波效果的影響見表3。
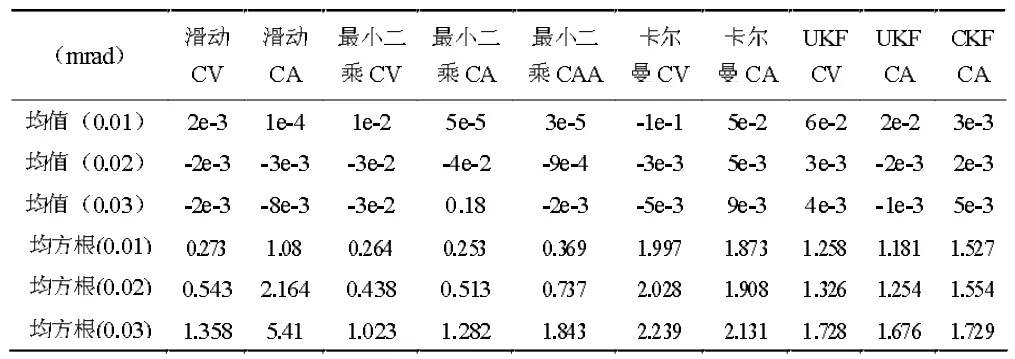
表3 正弦運(yùn)動模型下噪聲對濾波效果的影響分析
由表3 可以看出,在對含噪聲的正弦模型進(jìn)行濾波預(yù)測,CV 模型的最小二乘濾波能得到較好的效果,卡爾曼及其變種的濾波方法未能取得較好的效果。
由以上仿真分析可知,對于搖擺條件下的勻速直線模型,最小二乘CA 濾波效果最好;對于采樣周期一定的有噪聲的線性模型,特別是噪聲比較大的勻速直線運(yùn)動模型,無跡卡爾曼濾波(UKF)和最小二乘CV 濾波算法能取得不錯的效果;對于有噪聲的正弦運(yùn)動模型,最小二乘CV、CA濾波算法能取得較好的效果。
4 結(jié)論
針對某新型執(zhí)法裝備在高海情下穩(wěn)定跟蹤的工作需求,本文建立了目標(biāo)勻速、勻加速和正弦運(yùn)動模型,基于滑動窗口、最小二乘和卡爾曼濾波開展了濾波算法研究,對比了噪聲情況下各算法的仿真對比,仿真結(jié)果表明針對噪聲比較大的勻速直線運(yùn)動模型,容積卡爾曼濾波和最小二乘CV濾波算法效果較好,而對于有噪聲的正弦運(yùn)動模型,最小二乘CV、CA和滑動窗口CV 濾波算法效果較好。本文開展的濾波算法研究對某新型執(zhí)法裝備算法優(yōu)化具有工程指導(dǎo)意義。
猜你喜歡
童話王國·奇妙邏輯推理(2024年5期)2024-06-19 16:03:38
中老年保健(2021年12期)2021-11-30 02:58:01
中學(xué)生數(shù)理化·七年級數(shù)學(xué)人教版(2020年10期)2020-11-26 08:24:50
數(shù)學(xué)物理學(xué)報(2020年2期)2020-06-02 11:29:24
攝影之友(影像視覺)(2019年2期)2019-03-05 08:27:14
中華詩詞(2018年11期)2018-03-26 06:41:34
北京航空航天大學(xué)學(xué)報(2017年9期)2017-12-18 07:12:25
光學(xué)精密工程(2016年6期)2016-11-07 09:07:19
Coco薇(2016年8期)2016-10-09 02:11:50
電源技術(shù)(2016年9期)2016-02-27 09:05:39
