高速磁浮列車雙邊串聯供電牽引力特性及速度提升能力研究*
2023-09-22 04:43:44汪自成
電機與控制應用 2023年9期
汪自成
(中鐵第四勘察設計院集團有限公司 電氣化設計研究院,湖北 武漢 430063)
0 引 言
高速磁浮列車是一種新型的非接觸式地面軌道交通運輸工具,其以8~12 mm的懸浮間隙運行故而取消了傳統車輛中的車輪,實現了非黏著牽引的非接觸運行。因其噪聲小、速度范圍寬、加減速度快、維護費用低等優點具有廣闊的應用前景[1-2]。
目前,長定子直線同步電機實現了高速磁浮列車的驅動與懸浮,而動力主要由牽引供電系統提供,主要包括供電、變流、饋電電纜、軌旁開關等部分,該方式是高速磁浮交通技術中的一項關鍵技術[3-4]。
文獻[5]主要采用牽引變流器雙端并聯供電模式為磁懸浮列車提供牽引動力,可以減小線路損耗,提高系統可靠性;文獻[6]主要研究了高速磁浮列車在雙端供電模式下的牽引控制策略,并建立了該模式下的磁浮列車數學模型;文獻[7]主要研究了高速磁浮長定子直線同步電機的換步方式,并分別對比了兩步法和三步法對磁浮車輛牽引特性及動力學性能的影響;文獻[8]主要對磁浮列車牽引供電系統進行建模與仿真,仿真模型實現了相應的控制和分段供電策略;文獻[9]提出通過蓄電池與感應線圈供電相結合的方式,減少地面供電設備數量,利用多重冗余設計保證車輛供電的可靠性;文獻[10]建立了雙端供電模式下的磁浮列車模型,提出了相應的牽引控制策略,并比較了不同控制條件下磁浮列車的運行情況;文獻[11]基于供電系統的數學模型,構建自適應觀測器,推導饋線電纜電阻估計下的自適應規律,并運用于供電系統控制。
傳統的高速磁浮列車采用雙邊并聯供電模式,雙邊變電所通過輸入變壓器、整流器、逆變器和輸出變壓器處理后,輸出三相頻率、幅值和相角都可以控制的交流電向直線同步電機的長定子繞組供電。這種供電方式可以減小饋線電纜上的損耗,對系統的容量、可靠性和效率有一定提升,但會產生環流問題[12]。由于功率器件觸發會有延時并且受死區影響等因素,各逆變器輸出的瞬時電壓不完全一致,線路阻抗差異產生環流,環流的產生會使各變流器功率不均衡,電流波形發生畸變,從而使整個系統工作性能下降[13]。
本文提供了一種高速磁浮交通的雙邊串聯供電方法,主要是將長定子直線同步電機串入雙邊變流器中,并根據等電壓分配策略,滿足幅值相等、相角不同的原則,給直線同步電機的長定子繞組供電;最后通過在Simulink中建立長定子直線同步電機和饋線電纜模型,輸入上海磁浮列車的速度曲線到并聯和串聯供電模式中,發現雙邊串聯供電在最高速度的電壓小于雙邊并聯供電的電壓,且當限制相同的變流器電壓時,雙邊串聯供電的速度更高。
1 雙邊牽引供電方式
1.1 雙邊串聯供電系統
高速磁浮列車的牽引供電系統主要由牽引變電所、饋線電纜、定子開關站和定子段繞組構成。為保證列車的穩定運行,一般采用雙邊牽引供電系統,雙邊串聯供電系統如圖1所示。
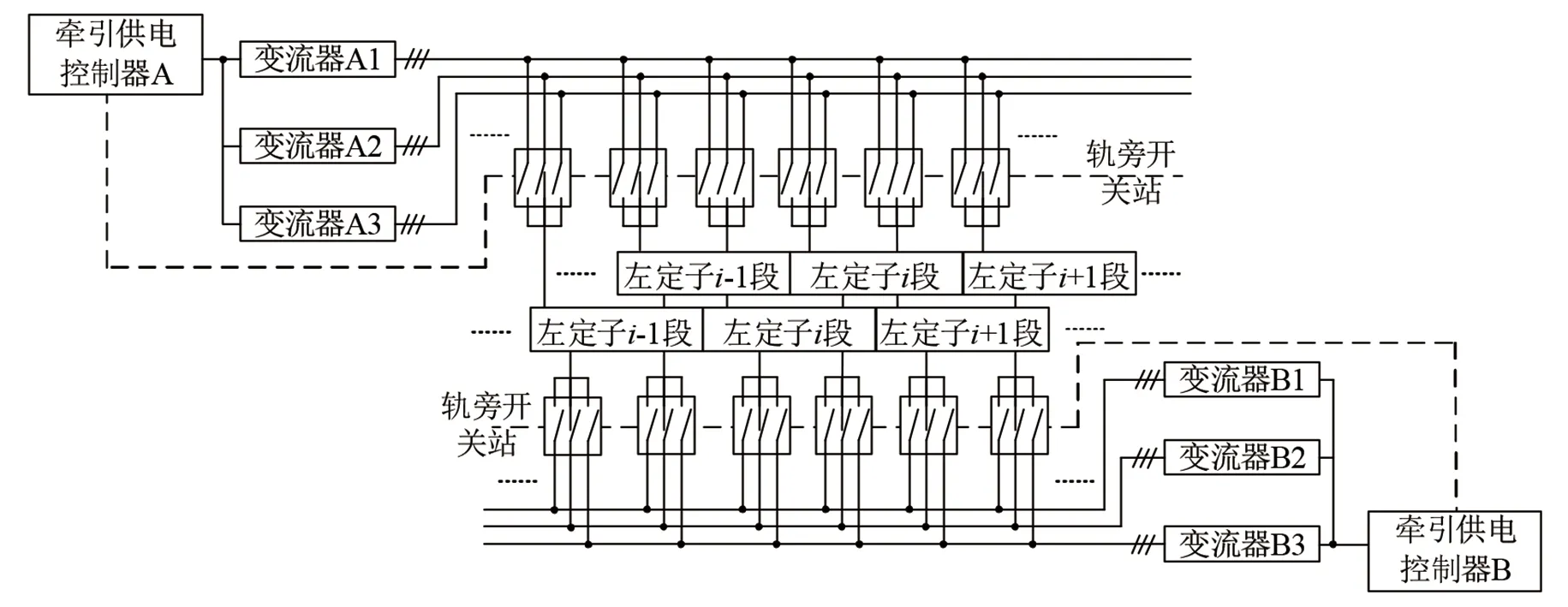
圖1 雙邊串聯供電系統圖
長定子段串聯在雙邊變流器中間,左右兩側的變流器輸出的幅值相同、相位相差180°。將左、右變流器的饋線等效為電阻和電感參數,其值與列車運動的位置有關。以一個長定子段為單元,可得到直線同步電機在雙邊串聯供電方式下的等效電路圖,其等效電路圖如圖2所示。
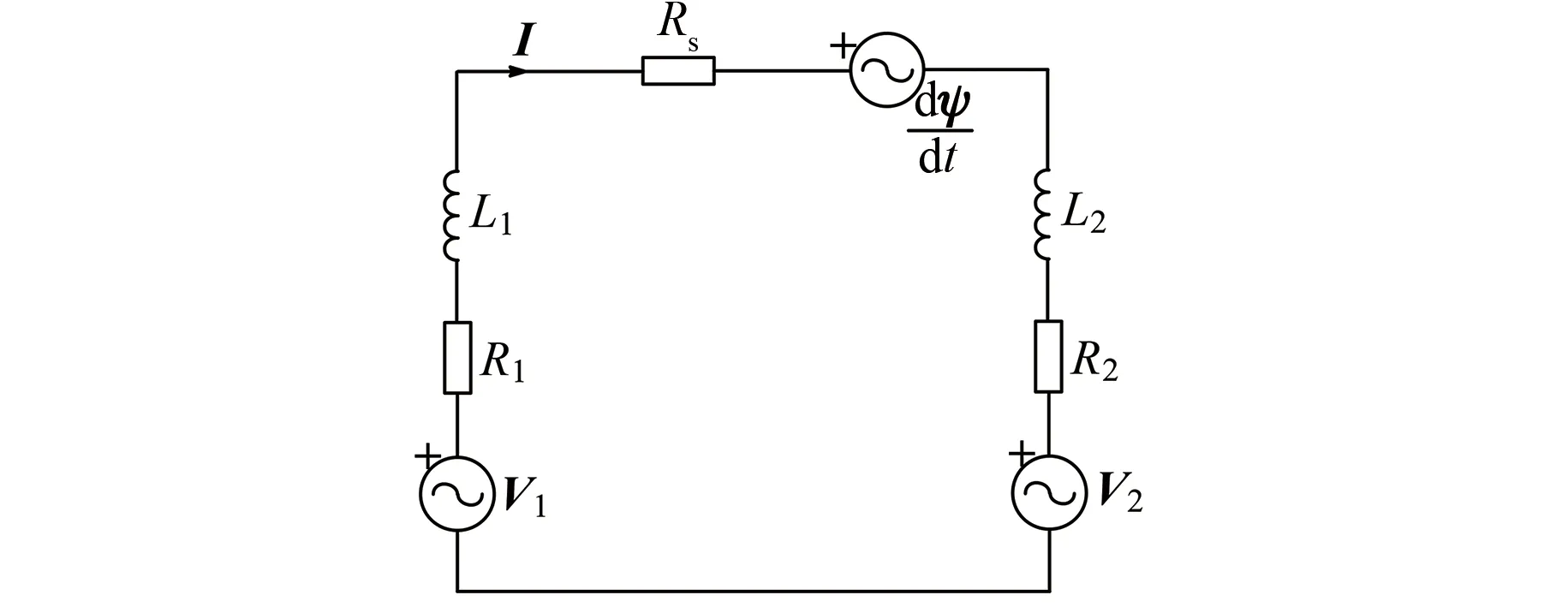
圖2 雙邊串聯供電的等效電路圖
三相靜止坐標系下的電壓方程為
V1=(R1+Rs+R2+L1p+L2p)I+pψ+V2
(1)

式中:ua1、ub1、uc1分別為左側變流器的三相輸出電壓;R1、L1分別為左側變流器饋線電纜等效電阻和電感;ua2、ub2、uc2分別為右側變流器的三相輸出電壓;R2、L2分別為右側變流器饋線電纜等效電阻和電感;ia、ib、ic為直線同步電機長定子繞組的三相電流;Rs為直線同步電機長定子等效電阻;ψa、ψb、ψc分別為直線同步電機的三相磁鏈;p為時間的微分算子。
為了消除時變電感帶來的復雜性,將ABC坐標系的等效電路和微分方程轉換到d-q坐標系,采用幅值相等轉換原理,轉換矩陣可表示為
T3s/2r=

(2)
式中:ω為定子角速度。
將式(1)乘以式(2),可以得到雙邊串聯供電d-q軸下的電壓方程為

(3)
式中:ud1、ud2、uq1、uq2分別為兩側變流器d-q軸的電壓;id、iq分別為直線同步電機d-q軸的電流;Ld、Lq分別為直線同步電機d-q軸的電感;Msm為定、動子間的互感;im為勵磁電流。
1.2 雙邊并聯供電系統
傳統的高速磁浮列車采用雙邊并聯供電,為了比較不同供電模式的電壓電流輸出,下面將簡要介紹傳統的雙邊并聯供電系統。這種方式是將雙邊變流器并聯后連接到長定子段上,幅值和相位都相同。以一個長定子段為單元,可以得到直線同步電機在雙邊并聯供電方式下的等效電路,等效電路圖如圖3所示。

圖3 雙邊并聯供電的等效電路
三相靜止坐標系下的電壓方程為

(4)

式中:ia1、ib1、ic1分別為左側變流器的三相輸出電流;ia2、ib2、ic2分別為右側變流器的三相輸出電流;ua、ub、uc分別為直線同步電機長定子繞組的三相電壓。
根據變換矩陣,將式(4)乘以式(2),可以得到雙邊并聯供電d-q軸下的電壓方程為

(5)
1.3 等電壓分配策略
等電壓分配策略在雙邊串聯供電方式下讓兩側變流器的電壓滿足幅值相等,相位相差180°;在雙邊并聯供電方式下讓兩側變流器的電壓滿足幅值相等,相位也相等。因此雙邊串聯和雙邊并聯在d-q軸下的電壓分別滿足:

(7)
式中:ud1s、uq1s和ud2s、uq2s分別是雙邊串聯供電模式下左側變流器和右側變流器的d-q軸電壓;ud1p、uq1p和ud2p、uq2p分別是雙邊并聯供電模式下左側變流器和右側變流器的d-q軸電壓。
其中雙邊串聯供電模式下的左、右側變流器的電流等于電機長定子上的電流;而雙邊并聯模式下的左、右變流器電流是將式(7)代入式(5)得到,表達式如下:
(9)
2 牽引力與阻力特性計算
2.1 牽引力與加速度關系
高速磁浮列車的牽引力與加速度的關系式為
Fx-Ff=ma
(10)
式中:Fx為牽引力;Ff為阻力;m為磁浮列車的質量;a為加速度。
直線同步電機的電磁推力為

(11)
式中:τ為極距。
目前高速磁浮列車的控制大多數以轉子磁場定向id=0為控制策略,則式(11)的電磁推力方程可以簡化為

(12)
2.2 運行阻力特性計算
假設整個運行區間沒有坡道,則磁浮列車運行過程中所受的阻力包括空氣阻力、渦流阻力、發電機產生的制動力三部分。列車運行總阻力與這三部分阻力滿足以下關系:
Ff=fk+fw+fm
(13)
式中:fk為列車運行過程中的空氣阻力;fw為列車運行過程中長定子與兩側導軌之間的渦流阻力;fm是由于定子鐵心齒槽的高頻磁場分量在懸浮機車運行過程中在直線發電機線圈中產生感生電流,從而產生的與列車前進方向相反的阻力。
各部分阻力計算式如下:
fk=3.2v2(0.53N/2+0.3)
(14)
fw=1 000N(0.1v0.5+0.02v0.7)
(15)
fm=

(16)
式中:v為列車運行速度,N為列車編組。
3 雙邊供電系統建模與驗證
本文的仿真參數是以上海高速磁浮列車示范線的實際參數為準,其饋線電纜與長定子參數如表1和表2所示。

表1 饋線電纜參數
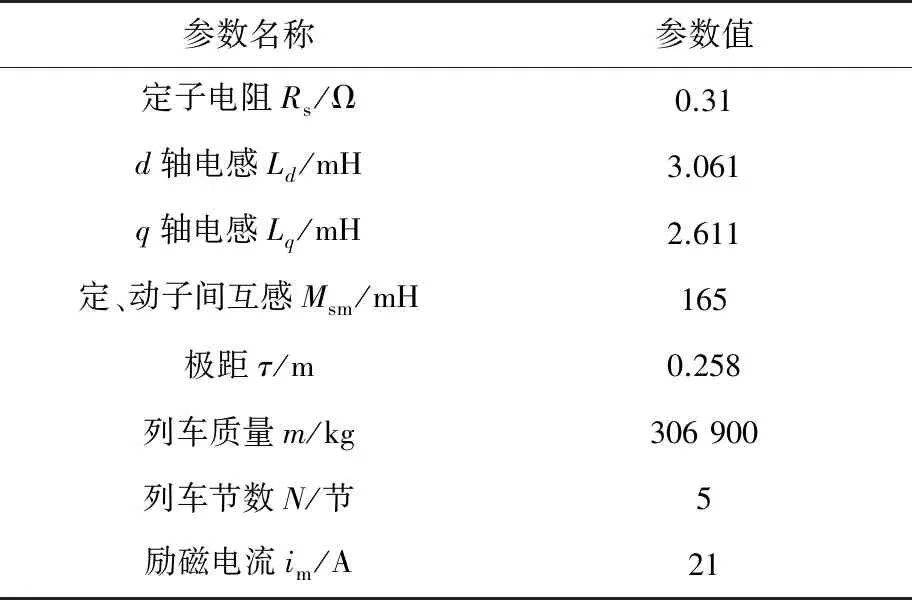
表2 長定子直線同步電機的模型參數
將饋線電纜參數和直線同步電機的長定子參數代入電壓和牽引力方程中,可以建立雙邊串聯供電和雙邊并聯供電的仿真模型。圖4和圖5分別為雙邊串聯供電和雙邊并聯供電的電壓計算模塊圖。
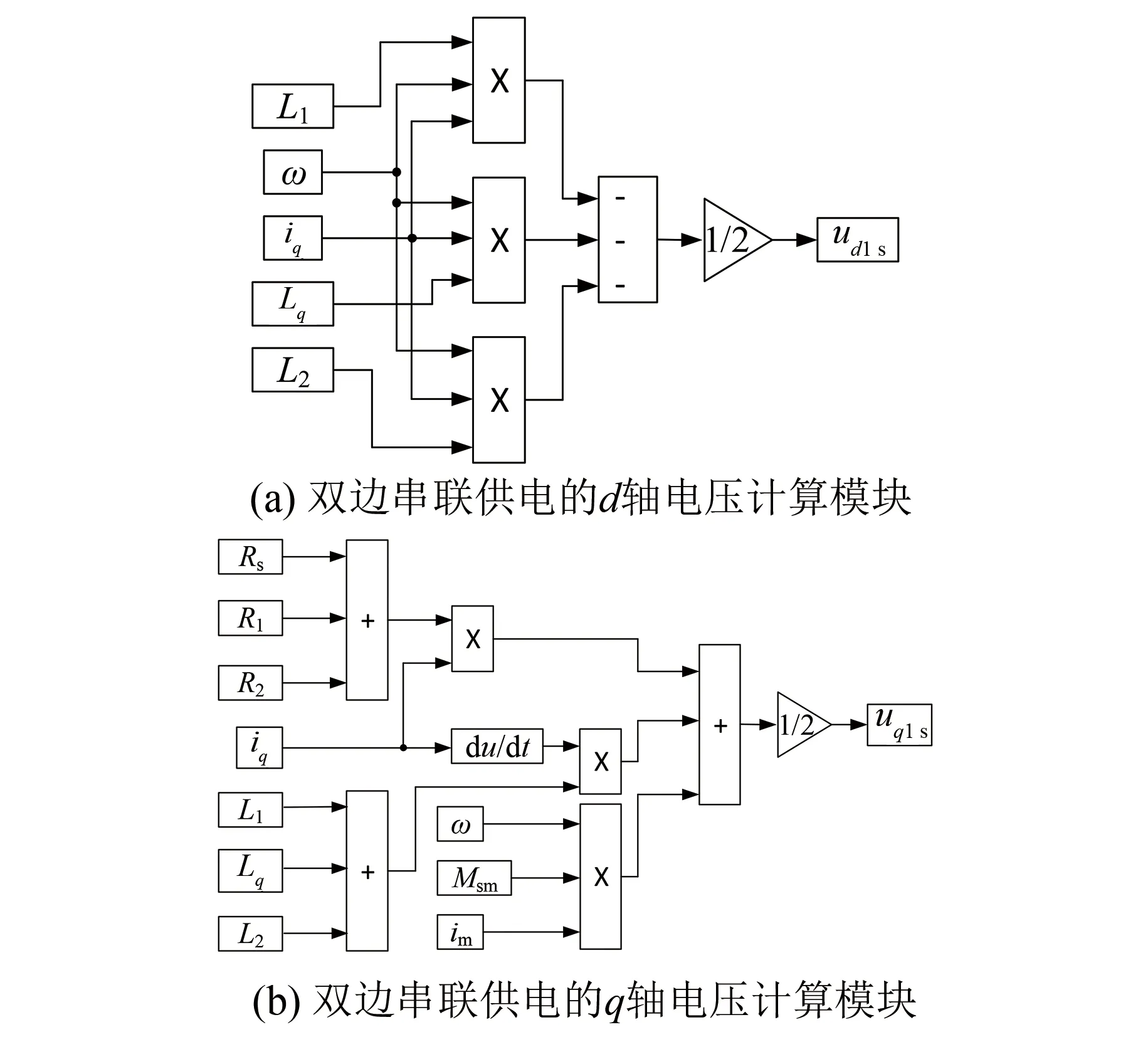
圖4 雙邊串聯供電電壓計算模塊圖

圖5 雙邊并聯供電電壓計算模塊圖
把上海高速磁浮列車的速度曲線輸入,可以得到不同供電模型下的線路特性,如圖6所示。

圖6 列車速度、加速度和發電機阻力曲線圖
列車先加速再制動,最大速度為140 m/s,發電機阻力也如式(16)一樣先為常值再與速度成反比。
雙邊串聯和雙邊并聯供電的q軸電流如圖7所示,由于仿真系統中輸入的都是上海磁浮運行的實際線路信息,所以兩者的q總電流是相等的,其中雙邊串聯供電中變流器的電流就是總電流,而并聯供電中iq1是左側變流器的q軸電流,iq2是右側變流器的q軸電流,兩者加起來才是電機上的q軸總電流。

圖7 q軸電流曲線圖
不同供電模式下左側變流器的輸出電壓如圖8所示。結果表明,雙邊串聯供電模式在最高速度時的d-q軸電壓均低于雙邊并聯供電模式,所以在選擇變流器時,雙邊并聯供電需要選擇更高的電壓配置。
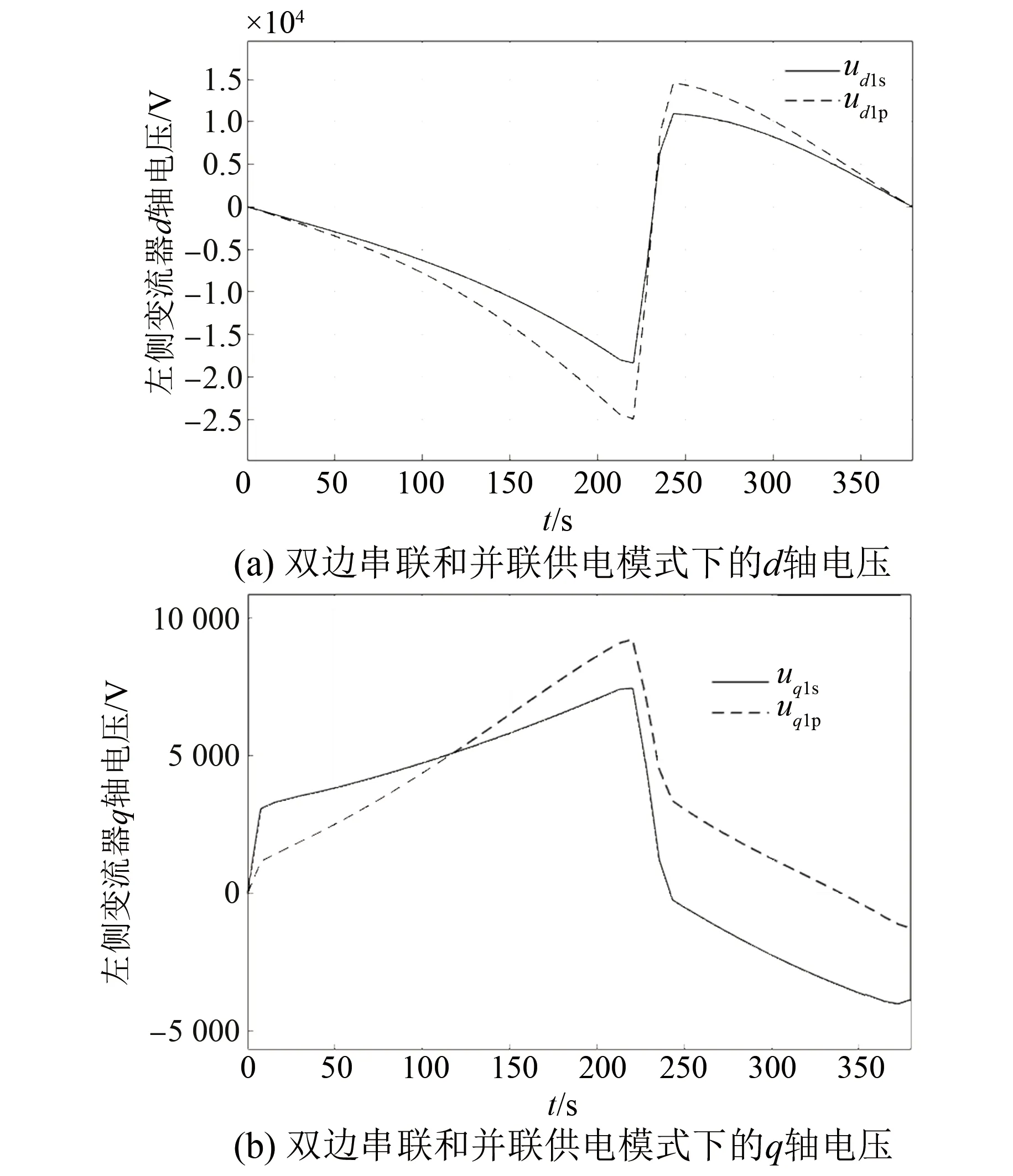
圖8 不同供電模式下左側變流器的輸出電壓圖
當給雙邊串聯供電模式和雙邊并聯供電模式限制同樣的電壓時,結果如圖9所示。左側變流器d-q軸電壓都在同等電壓限制下,此時雙邊串聯供電的q軸總電流和運行速度都大于雙邊并聯供電模式,該結果驗證了雙邊串聯供電在不改變傳統并聯供電的變流器能力和絕緣的情況下,確實能提高高速磁浮列車的牽引力能力和運行速度。

圖9 在同等電壓限制時不同供電模式下的曲線圖
4 結 語
本文針對高速磁浮列車牽引供電系統提出了一種新的雙邊串聯供電方式,將直線同步電機串聯在雙邊變流器上,并使輸出電壓幅值相等,相角相差180°。通過在Simulink中建立長定子直線同步電機和饋線電纜模型,輸入上海磁浮列車的速度曲線到并聯和串聯供電模式中,驗證發現雙邊串聯供電在最高速度的電壓比并聯供電低,且在同等電壓限制時,雙邊串聯供電的運行速度和q軸總電流都比并聯供電高,驗證了雙邊串聯供電模式在高速磁浮列車上的優勢性。
