基于改進無源性控制的三相LCL并網逆變器輸出導納重塑方法
2023-09-26 11:57:46張建文
上海交通大學學報 2023年9期
王 晗, 張建文, 施 剛, 朱 淼, 蔡 旭
(上海交通大學 電力傳輸與功率變換控制教育部重點實驗室,上海 200240)
在能源短缺和全球變暖的影響下,分布式可再生能源發電系統變得越來越重要.一般情況下,可再生能源經由并網變換器將電能饋入電網,但同時不可避免地向電流注入諧波電流.為了有效衰減注入電網的電流諧波,文獻[1]中采用LCL濾波器來濾除開關諧波,但LCL濾波器存在固有諧振,可能會破壞系統的穩定性,尤其是在電網阻抗寬范圍變化的情況下其穩定性問題尤為突出,這對并網逆變器控制器的設計提出挑戰[2].
針對LCL濾波器存在固有諧振的問題,通常采用無源阻尼[3-5]或有源阻尼[6-10]控制技術來消除諧振.其中,無源阻尼方法直接在濾波電路中附加物理電阻,方法簡單但會帶來額外功率損耗.主動阻尼方法通常采用狀態反饋變量構造虛擬電阻來實現,但往往需要額外傳感器或復雜的算法.文獻[11-12]中發現在控制中:如果LCL諧振頻率低于采樣頻率的1/6,則逆變器側電流反饋控制不需要額外阻尼即可實現LCL并網變換器的諧振頻率控制;而對于電網側電流反饋控制,LCL諧振頻率應高于采樣頻率的1/6.但上述有源阻尼控制方法的控制效果嚴重依賴電網阻抗、LCL濾波器參數和采樣頻率[13].
除了線性控制方法外,考慮到變換器的非線性特性,一些非線性控制方法得到越來越多的研究[14],包括無源性控制(Passivity-Based Control,PBC)[15-16]、預測控制[17-18]和滑模控制[19-20]等.在這些非線性控制方法中,PBC方法以其基于能量耗散和修正方法的高性能和強魯棒性而受到廣泛關注.PBC方法最早由Ortega等[21]在電氣系統中提出,該方法采用歐拉(Euler-Lagrange,EL)模型或帶耗散的端口控制哈密頓系統方程描述物理系統,通常構造基于李雅普諾夫理論的誤差能量函數,并采用阻尼注入設計控制器.文獻[22]中采用基于PBC的EL模型,用L濾波器抑制鐵路電力系統中的低頻振蕩.文獻[15]中對中性點箝位光伏逆變器實施基于無源性的解耦控制,以避免參數擾動,但未考慮電網阻抗.為了減小穩態誤差,提高系統魯棒性,文獻[16]中提出基于PBC的LCL濾波并網逆變器阻尼增益的設計方法,但未考慮精確的控制延遲.在某些情況下,并網逆變器通常在分布式發電系統中的公共耦合點(Point of Common Coupling,PCC)與電網連接在一起;在長電纜或更復雜的電網中,等效電網阻抗可能是電容性的,從而引發并網變換器的不穩定.針對基于LCL并網電壓源逆變器(LCL Voltage Source Inverter,LCL-VSI)系統,文獻[23]中指出傳統PBC方法較少考慮電網阻抗的電容效應以及精確的數字控制延遲,導致數字控制系統容易出現交互共振的問題[24-25].因此,復雜電網阻抗情況下PBC控制器的設計非常重要.雖然PBC被定義為基于能量耗散的非線性控制,但控制律可以用線性控制塊來實現,因此PBC結合了前饋控制、負反饋控制和解耦控制.為了克服電網阻抗的不確定性,基于阻抗的方法被用于評估并聯VSI系統的穩定性和動態相互作用[26-27].文獻[28]中分析了采用傳統比例(Proportion Integral,PI)或諧振控制器的單回路網側電流控制和變流器側電流控制的無源特性,但很難保證所有區域的無源性.
鑒于此,建立三相LCL并網逆變器的EL模型,推導基于逆變器側電流控制的傳統PBC控制律,建立逆變器的輸出導納模型.基于頻域無源性理論,分析延遲效應對逆變器輸出導納的影響及其非無源區域,采用電容電流前饋來擴展無源區域,實現奈奎斯特頻率范圍內輸出導納的無源性.最后,利用仿真和實驗驗證了所提方法的有效性.
1 三相LCL并網逆變器的傳統PBC控制
1.1 系統建模
圖1為三相LCL并網逆變器的系統示意框圖.圖中:LCL濾波器包括變換器側電感L1、濾波電容C和網側電感L2;R1和R2分別為L1和L2的等效寄生電阻;i1和ui分別為脈寬調制逆變器的輸出電流和電壓;uc和ic分別為電容器的電壓和電流;udc和Cdc分別為直流電壓、電容;i2為注入電網的電流;upcc為PCC點電壓;Zg為電網的阻抗,由電網等效電感Lg和電網等效電容Cg組成.
三相LCL并網逆變器在同步旋轉dq坐標系中的數學模型可由變換器側電壓方程、LCL濾波器電容電壓方程和變換器側電流方程等3個方程表示,其中變換器側電壓方程為
(1)
式中:t為時間;ω為電網角頻率;變量的下標d和q分別對應物理變量在dq旋轉坐標系下的d軸分量和q軸分量.
LCL濾波器電容電壓方程為
(2)
變換器側電流方程為
(3)
EL方法是非線性PBC理論的重要組成部分,常被用來描述系統模型.由于逆變器側電流是受控的,濾波電容器和濾波電感可以與電網阻抗一起考慮,所以只需設計逆變器側電流變量的EL模型即可.因此式(1)可寫為EL模型的形式,其表達式為
(4)
式中:
式(4)被視為狀態方程.M和R為正定對角矩陣,其中R代表系統的內部能量耗散特性;J為描述d軸和q軸電流分量之間內部耦合結構的斜對稱矩陣;u為控制輸入矩陣,代表系統和外部能量輸入.
1.2 傳統PBC控制律與阻尼注入
根據無源性理論[15,17],假設某系統的輸入和輸出變量分別為u和y,如果存在正定函數Q(x)和非負存儲函數V(x)滿足如下不等式,則系統被認為是嚴格無源的.
(5)
式中:uTy為外部能量的注入速率.式(5)表示系統增加的能量之和總是小于外部注入能量之和.
對于LCL并網逆變器,定義正定函數V(x)表示系統存儲的能量,其表達式為
V(x)=xTMx
(6)
對于式(6),取系統能量函數式(5)的時間導數并結合式(4)可得:
xTu-xTJx-xTRx
(7)

根據無源性理論,式(7)中描述的對象是嚴格無源的,可以采用傳統的PBC來設計控制器.考慮逆變器側電流控制,則系統的狀態變量可定義為
(8)

定義電流的誤差向量為xe=x*-x,根據式(4)得到系統的誤差EL方程,即
(9)
對式(9)進行重新整理,可得:
(10)
對于式(10),如果誤差xe等于0,即可實現期望的控制目標,使系統在期望的工作點穩定運行.為了改進系統的動態速度,可在式(10)中添加正阻尼矩陣Rd,使加速誤差達到0.定義注入的阻尼項為
(11)
式中:r1為阻尼系數.
增加阻尼項后,系統新的耗散項可描述如下:
(12)
將式(12)引入式(10),則注入阻尼后誤差方程可改寫為
Rx*+Rdxe-u=H
(13)
將H設為Jxe可消除系統的耦合項.則由式(13)可得出系統的控制律如下:
(14)
根據前述分析,基于PBC方法的三相并網逆變器的頻域dq控制率框圖如圖2所示.圖中:L1e和R1e為控制器中設計的LCL濾波器參數;s為拉普拉斯算子.在具體實現過程中,可用PI控制器代替r1來減小穩態誤差.

圖2 基于傳統PBC的并網逆變器控制率Fig.2 Control structure for three-phase grid-connected inverter based on PBC
2 帶PBC的LCL并網逆變器阻抗模型及穩定性分析
2.1 帶PBC的LCL并網逆變器


圖3 LCL并網逆變器的諾頓等效模型Fig.3 Norton equivalent model of LCL grid-connected inverter
(15)
式中:G(s)決定LCL并網逆變器變換器側電流控制的動態響應和穩態誤差.
將濾波電容C、網側電感L2以及電網阻抗Zg視為并網變換器的外部阻抗,定義Ygt(s)為逆變器側總的外部電網導納,如圖3中陰影部分,其表達式可表示如下:
(16)
結合式(15)和(16),可推導出并網逆變器變換器側電流與電網電壓的電流響應為
(17)
由式(17)可知,并網逆變器系統的動態響應和外部干擾穩定性與傳遞函數Yo(s)/Ygt(s)有關,因此,Yo(s)和Ygt(s)均應為無源,才能保證并網逆變器和電網互聯系統的穩定性.但由于Ygt(s)由電阻、電感和電容組成,顯然是一個無源網絡,所以PBC控制并網逆變器的輸出阻抗Yo(s)應該無源才能保持系統穩定.
由于需要考慮系統采樣延遲和控制延遲,式(14)考慮延遲后的并網逆變器控制律可表示為
u*=uGd(s)
(18)
式中:Gd(s)=e-1.5Tss為計算和調制延遲,其中Ts=1/fs為采樣周期,fs為采樣頻率.
根據圖2可將PBC控制LCL并網逆變器的控制律寫為
(19)
式中:ω=2πf,E=sL1e+R1e+r1.

Gd(s)=
(20)

LCL并網逆變器的輸出導納可表示為
Yo(s)=
(21)
2.2 基于無源性理論的LCL并網逆變器系統穩定性分析
根據無源性理論,基于PBC的LCL并網逆變器穩定需滿足如下兩個條件:①閉環傳遞函數G(s)應該沒有右邊平面極點;②逆變器的輸出導納Yo(jω)應具有非負實部,或Yo(jω)的相位φ(jω)在 [-90°,90°]范圍內,即ReYo(jw)≥0?argYo(jω)∈[-90°,90°], ?ω>0.
系統參數分別為udc=350 V;L1=1.2 mH;L2=1.2 mH;R1=0.1 Ω;R1=0.2 Ω;C=6 μF;fs=10 kHz;開關頻率fsw=10 kHz;Ug=110 V;電網頻率fo=50 Hz.根據式(21),圖4給出阻尼系數r1變化下LCL并網逆變器輸出導納Yo(s)的實部和頻率f的三維圖.要使逆變器系統穩定不受外部環境影響,則系統應該無源,即并網逆變器的輸出導納Yo(s)的實部應該大于0.

圖4 不同阻尼系數r1下并網逆變器輸出導納Yo(s)的實部隨頻率的變化Fig.4 Real part of the output admittance Yo(s) of grid-connected inverter versus frequency at different r1 values
由圖4可以看出,PBC控制下并網逆變器的等效輸出導納Yo(s)存在負電阻會導致系統不穩定.r1越小,系統的無源區域越大,系統穩定性越好,但不能滿足奈奎斯特頻域內無源;當r1>14時,系統在全頻域非無源,無論Ygt值是多少,逆變器都會和電網存在交互諧振.
圖5給出r1變化下G(s)的階躍響應y(t)波形.由圖可見,隨著r1增大,G(s)的動態響應和帶寬越好.圖5可用以幫助選擇r1,可根據超調性能和設定時間令r1在3~6取值.因此,r1應在4~9取值以使系統獲得更好的穩定裕度.同時,考慮G(s)的穩定性和系統動態響應,r1取值為6.

圖5 不同阻尼系數r1下G(s)的階躍響應Fig.5 Step responses of G(s) at different r1 values
3 基于電容電流前饋的阻尼增強方法
為了擴大系統的無源性區域,需要研究系統阻尼的增強方法.為了重塑并網逆變器的輸出導納,可考慮引入電容電流前饋,圖6為基于電容電流前饋的阻尼增強控制框圖.圖中,K(s)為有源阻尼環節,Δu=K(s)ic為電容電流前饋.

圖6 基于電容電流前饋的阻尼增強控制框圖Fig.6 Block diagram of damping enhancement control based on capacitive current feedforward
取K(s)為比例環節,即K(s)=kd,kd為電容電流前饋系數.考慮到濾波器電容電流ic=sCuc,可得Δu=K(s)ic=kdsCuc,則引入電容電流前饋后PBC控制并網逆變器的控制律可表示為
(22)
考慮延時后由式(22)可得引入電容電流前饋后PBC控制并網逆變器的輸出導納為
Yo(s)=
(23)
不同電容電流前饋系數kd下并網逆變器輸出導納和系統等效網絡導納Ygt(s)的伯德圖如圖7所示.圖中:Y(ω)為幅值;φ(ω)為相位.由圖7可知,加入比例前饋后,并網逆變器在高頻段的非無源區域變窄,可提高系統的穩定性,前饋系數越高抑制效果越好,但非無源性區域不能完全被消除;此外,如果前饋系數大到一定數值(如kd=21),則會在低頻和中頻引入新的非無源性區域.

圖7 不同比例前饋系數的輸出導納Yo(s)和等效網絡導納Ygt(s)的伯德圖Fig.7 Bode wave of Yo(s) at different proportional feedback coefficients and Ygt (s) values
為了使并網逆變器輸出導納在奈奎斯特頻率無源,在基于PBC的電容電流前饋回路中加入高通濾波器(High Pass Filter, HPF)替代比例前饋,其表達式為
(24)
式中:ωh為高通濾波器的截止角頻率.
將式(23)中的比例環節用式(24)替代后,不同電容電流前饋系數kd下并網逆變器輸出導納Yo(s)和等效導納Ygt(s)的伯德圖如圖8所示.由圖8可知,高通濾波器替代比例環節對Yo(s)的低頻段特性幾乎沒有影響,且可有效擴大系統在奈奎斯特頻率附近或更高頻率段的無源性區域.選擇高頻濾波器K(s)的截止頻率為 1 600 Hz,電容電流前饋系數kd為7,可在奈奎斯特頻率范圍內,保證改進PBC控制并網逆變器并弱電網的穩定性.Yo(s)的幅值在低頻范圍內足夠小,說明改進的PBC控制使逆變器具有較強的電網諧波電壓抑制能力.
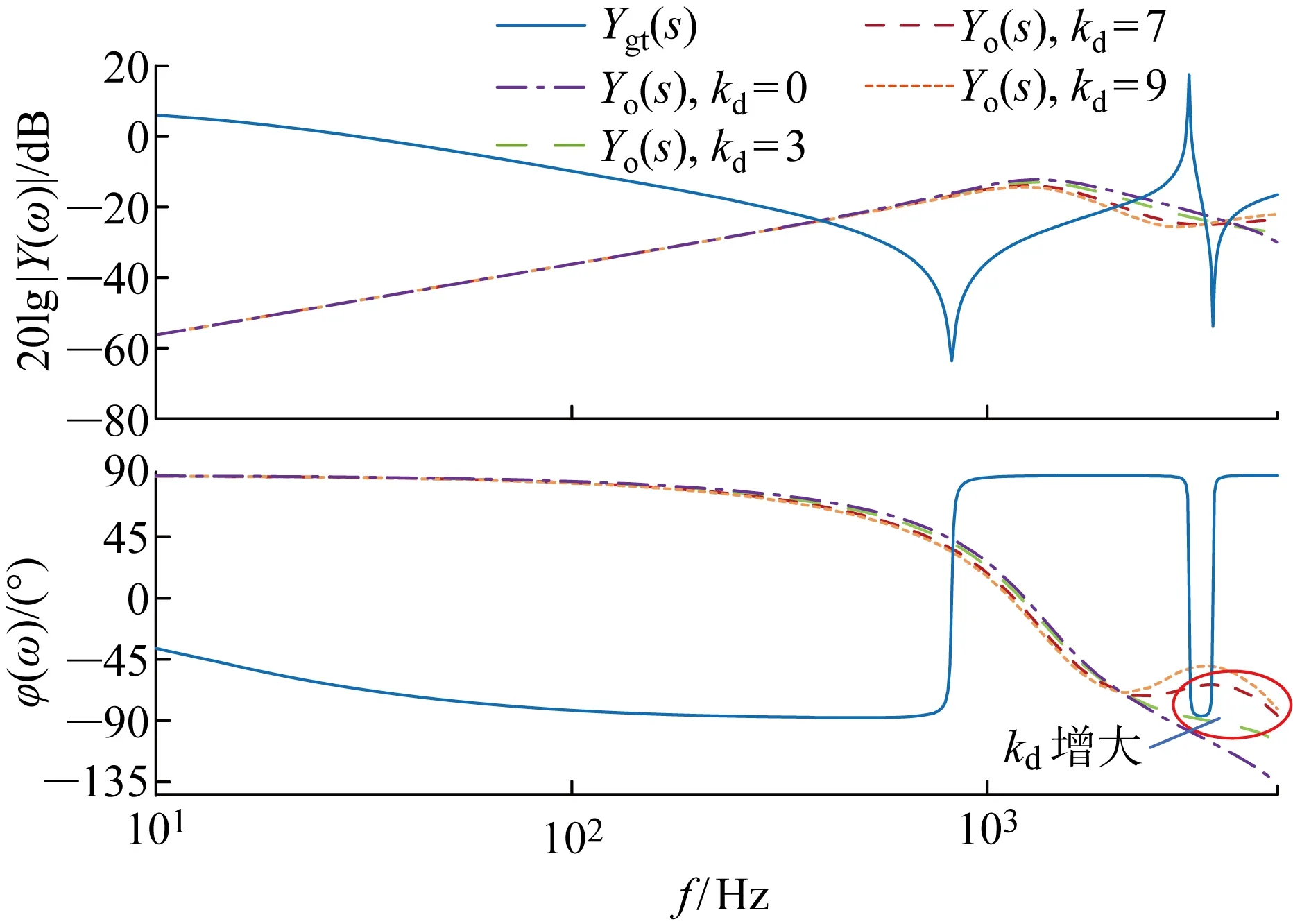
圖8 不同HPF前饋系數的輸出導納Yo(s)和等效網絡導納Ygt(s)的伯德圖Fig.8 Bode wave of Yo(s) at different HPF feedback coefficients and Ygt(s) values
4 仿真和實驗驗證
4.1 仿真結果
為了驗證本文所述控制方法的有效性,開展基于MATLAB/Simulink的PBC三相LCL并網逆變器系統的仿真驗證.仿真中并網逆變器的電容電流前饋系數kd=7,阻尼系數r1=6,其他參數如2.2節所示,仿真波形如圖9~圖12所示.

圖9 強電網下不同電容電流前饋控制的并網電流仿真波形(Lg=0,Cg=0)Fig.9 Simulation waves of grid currents of different capacitor current feedback methods (Lg=0, Cg=0)
圖9給出在強電網中采用不同電容電流前饋控制策略時,PBC控制LCL并網逆變器并網電流的波形.仿真設置如下:在0.12 s前,采用HPF電容電流前饋控制;在0.12 s時,采用比例電容電流前饋控制;0.16 s時,不采用任何有源阻尼策略.由波形可見,強電網下當采用有源阻尼控制策略時并網電流均是穩定的;當不采用任何有源阻尼策略時,并網電流出現振蕩,系統存在失穩問題.
圖10為當Lg=0且Cg=0時,無電容電流前饋時Yo(s)和Ygt(s)的伯德圖.由圖可見,在交互點處Yo(s)和Ygt(s)的相位差大于180°,可知PBC控制的三相LCL并網逆變器可能會因延遲的影響而不穩定,應采用阻尼增強方法.

圖10 無電容電流前饋下Yo(s)和Ygt(s)的伯德圖(Lg=0, Cg=0)Fig.10 Bode waves of Yo(s) and Ygt(s) without capacitor feedforward at Lg=0 and Cg=0
當并網逆變器經長電纜接入電網時,電網等效阻抗中的C不可忽略,當Lg=3.6 mH、Cg=2 μF時,采用不同電容電流前饋方法的三相LCL并網逆變器的并網電流如圖11所示.由圖可知,在容性電網下,在奈奎斯特頻率之前系統存在非無源區域,且不能用kd前饋控制進行完全補償;在0.12 s時,當切換到提出的HPF前饋控制后,并網諧振電流得到有效抑制,并網逆變器逐漸趨向穩定.

圖11 考慮線路電容效應下不同電容電流前饋控制的并網電流仿真波形(Lg=3.6 mH,Cg=2 μF)Fig.11 Simulation waves of grid currents of different capacitor current feedforward methods (Lg=3.6 mH, Cg=2 μF)
為驗證多提改進有源阻尼策略對電網諧波的抑制能力,容性電網下0.12 s時往電網中注入3、5、7、11次諧波,諧波分量分別為5%、5%、5%、1.5%,結果如圖12所示.從圖中可以看出,在0.12 s后電網電壓發生了畸變,但是入網電流依然保持正弦.

圖12 電網含背景諧波的并網電流仿真波形(Lg=3.6 mH,Cg=2 μF)Fig.12 Simulation waves of grid currents of proposed control method in distorted grid (Lg=3.6 mH, Cg=2 μF)
4.2 實驗結果
為了進一步驗證提出控制方法的有效性,在實驗室對一臺3 kW三相LCL并網逆變器開展實驗研究.其中,控制器采用dSPACE DS1202,直流電源采用Chroma 62150H-600S,電網由Chroma 61830三相電網模擬器產生.系統參數與仿真實驗相同,HPF前饋系數kd取7,注入阻尼r1取6.實驗波形如圖13~16所示.圖中:下標a、b分別表示a、b相.

圖13 提出控制策略下LCL并網逆變器的穩態實驗波形(Lg=3.6 mH,Cg=3 μF)Fig.13 Experimental waveforms of proposed control method (Lg=3.6 mH and Cg=3 μF)

圖14 提出控制策略下LCL并網逆變器的暫態實驗波形(Lg=3.6 mH,Cg=3 μF)Fig.14 Dynamic experimental waveforms of proposed control method (Lg=3.6 mH and Cg=3 μF)
當Lg=3.6 mH和Cg=3 μF時,提出的控制策略下LCL并網逆變器的電壓和電流波形穩態實驗波形如圖13所示.由圖可知,并網電流正弦且與PCC電壓同步,這使電流注入性能與電容電網中的分析一致,驗證了所述控制策略可實現并網逆變器的穩定運行.
當參考電流從12.8 A跌落至6.4 A時,所提控制策略下LCL并網逆變器的暫態并網電流實驗波形如圖15所示.由圖可知,在容性電網中,采用所述控制策略可實現并網逆變器的暫態穩定運行,且系統具有較快的暫態特性.

圖15 提出控制策略下HPF前饋被禁止時LCL并網逆變器的實驗波形(Lg=3.6 mH, Cg=3 μF)Fig.15 Experimental waveforms of proposed control method at disabled HPF feedback (Lg=3.6 mH, Cg=3 μF)
圖15給出Lg=3.6 mH和Cg=3 μF時所述控制策略突然禁止時LCL并網逆變器的實驗波形.由圖可見,當所述HPF前饋控制方法使能時,LCL并網逆變器的并網點電流和電壓均保持正弦,系統運行穩定;當不使用HPF前饋控制方法時,LCL并網逆變器的并網電流和電壓出現振蕩發散現象,進而驗證了所述控制方法的有效性.
圖16為提出控制策略下電網中存在3、5、7次諧波電壓的實驗波形.由圖可見,雖然電網壓發生畸變,但入網電流波形質量較好,驗證了所述控制方法有較好的諧波抑制能力和抗擾性.

圖16 電網含背景諧波電壓時提出控制策略下的實驗波形(Lg=3.6 mH, Cg=3 μF)Fig.16 Experimental waveforms of proposed control method at grid background harmonic voltage (Lg=3.6 mH, Cg=3 μF)
5 結論
針對基于LCL濾波器的三相并網逆變器,提出一種基于無源性控制和并網逆變器輸出導納重塑的控制策略,利用仿真和實驗驗證了提出控制策略的有效性,研究得出如下結論:
(1) 基于傳統PBC的三相LCL并網逆變器,采用逆變器側電流控制可保證系統魯棒性,但延時效應的存在導致傳統PBC控制不能有效抑制交互諧振,尤其是在電容性電網中.
(2) 采用阻尼注入和基于HPF的電容電流前饋控制可實現三相LCL并網逆變器輸出導納在奈奎斯特頻率范圍內的無源性,實現LCL并網逆變器在復雜電網阻抗下的并網穩定性和電網諧波抑制.
猜你喜歡
工業設計(2022年8期)2022-09-09 07:43:20
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
能源工程(2020年6期)2021-01-26 00:55:22
北京測繪(2020年12期)2020-12-29 01:33:58
山東冶金(2019年3期)2019-07-10 00:54:04
消費導刊(2018年10期)2018-08-20 02:57:02
家庭影院技術(2017年9期)2017-09-26 03:41:45
通信電源技術(2016年1期)2016-04-16 04:57:26
Coco薇(2016年2期)2016-03-22 02:42:52
Coco薇(2015年1期)2015-08-13 02:47:34