基于激光雷達的市政道路結構層缺陷無損檢測技術
2023-09-27 07:55:46周曉雯王善美
城市建設理論研究(電子版) 2023年27期
關鍵詞:檢測
周曉雯 王善美
昆山求正工程質量檢測有限公司 江蘇 昆山 215300
迄今為止,道路結構層缺陷的檢測均較為復雜、繁瑣,在實際測定的過程中常常受到外部環境及特定因素的影響,導致最終難以獲取預期的檢測結果[1]。不僅如此,常規的檢測手段多為有損形式,舉例來說:鉆芯方法、三維鉆探方法等,這一類方法對于道路結構層平整度和強度之間的關系定位的并不準確,且多數的市政道路內部結構復雜性較大,混凝土板底脫空、下沉就斷裂等問題嚴重,一定程度上也是增加了道路結構層的壓力[2]。為此提出對基于激光雷達的市政道路結構層缺陷無損檢測技術的設計與驗證分析。所謂激光雷達技術,主要指的是以發射激光束的形式進行探測目標位置、方向以及速度等特征數量的采集,形成完整的雷達驗測結構。將該項技術與市政道路結構層缺陷無損檢測工作進行融合,可以進一步擴大實際的檢測范圍,逐步形成更為靈活、多變的檢測結構,最大程度降低檢測過程中存在的誤差,以雷達處理結構為以引導,進行路面異常標定、超前預報等,強化無損檢測效果,采用連續、快速檢測的方式,獲取最終的檢測結果,確保市政道路結構層施工的穩定性和安全性[3]。
1 設計市政道路結構層缺陷激光雷達無損檢測技術
1.1 結構層基礎缺陷識別及檢測數據采集
為確保道路的穩定性與安全性,保證其可以達到預期的使用年限,一般會在增加內置的結構層,提高承壓的范圍,促使路面壓力均勻分布[4]。因此,在對市政道路進行無損檢測之前,需要先利用激光雷達系統,進行結構層基礎缺陷識別及檢測數據采集。首先,明確市政道路結構層的覆蓋監測區域,并在邊緣位置設置初始的檢測節點,便于數據以及信息采集,避免對路面形成破壞性的損傷[5]。
利用雷達裝置先對道路的結構層發射穿透性的高頻電磁波,波段觸碰到路段之后,會進行反射,形成對應的反射信號,雷達通過主機接收信號,存儲在特定的程序中,進行信號解析,形成對應的數據和信息,匯總處理。同時,利用雷達信號還可以進行結構層缺陷的定向識別。
通常情況下,道路結構層缺陷可以劃定為脫空、短板、不規則開裂以及搓板等。采用定向掃描技術,對結構層進行反射點位的設定,結合三維虛擬處理技術,促使電磁波在地下穿越介質層,再次形成對等的波形,完成基礎缺陷的定向識別及數據信息的采集。
1.2 定位多階無損檢測與雷達反射節點
傳統的雷達定位一般為單層級處理,這樣的形式雖然可以實現預期的無損檢測任務,但是缺乏針對性,檢測的結果并不精準,為此,此次需要對多階無損檢測與雷達反射節點定位關聯,形成一個循環性的檢測區域,擴大檢測范圍的同時,調高檢測精度。首先,構建基礎的點位設置結構,如下圖1所示。

圖1 多階無損檢測與雷達反射節點定位結構圖示
根據圖1,完成對多階無損檢測與雷達反射節點定位結構的設計與研究,接下來,依據設定的節點覆蓋范圍,調整節點在路段上的具體位置,節點支架需要互相關聯搭接,便于數據及信息的采集共享。但是這部分需要注意的是,激光雷達設備及裝置的應用必須預先設定對應的執行探測目標,且將目標與節點之間建立正向的對等處理關系,這樣在實際執行的過程中,能夠最大程度降低存在的檢測誤差,提高無損檢測的精度,為后續工作的處理提供參考。
1.3 構建激光雷達映像無損檢測模型
完成對多階無損檢測與雷達反射節點的定位之后,接下來,結合激光雷達技術,構建映像無損檢測模型。首先,需要采用電磁波在市政道路的內部結構層之間進傳播處理,穿越層介層,形成反射效應。獲取電磁波的反射波段,通過雷達的定位裝置對異常的位置作出標定,形成連續性的無損檢測結構,具體如下圖2所示。

圖2 激光雷達映像無損檢測模型結構圖示
根據圖2,完成對激光雷達映像無損檢測模型結構的設計與調整。綜合激光雷達技術,所構建的無損檢測結構的覆蓋范圍也需要標定,轉換為邊緣檢測范圍之內,導入雷達內部的控制程序之中。雷達在檢測的過程中需要將實時的數據、圖像和視頻等傳輸到雷達存儲庫內。針對市政道路結構層不同的厚度,通過模型一一探測,完成缺陷識別之后,對具體的位置進行二次標記,實現無損檢測處理,進一步強化模型的檢測能力。
1.4 射線探傷處理實現無損檢測
所謂射線探傷,主要指的是一種定向的無損探測處理結構,一般是針對市政道路結構層較深的工程設定的,針對性和探測的穩定性較高,結合激光雷達技術,可以獲取更好地檢測結果。可以先通過設定的節點劃定具體的檢測局域,形成多層級的檢測結構之后,進行射線覆蓋探傷范圍的設置,同時調整射線各個點位的反射指標參數,如下表1所示。
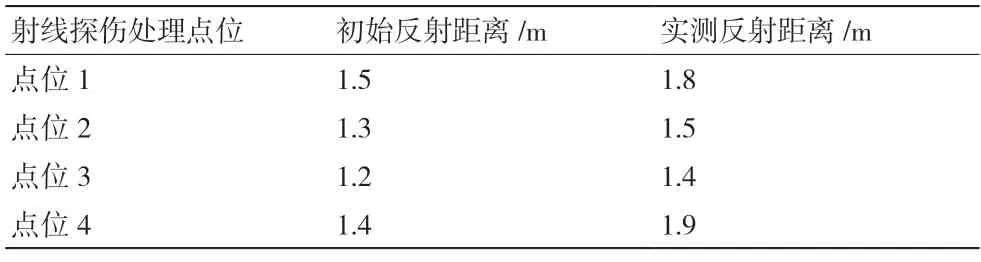
表1 射線探傷處理點位數值設定表
根據表1,完成對射線探傷處理點位數值的設定。接下來,結合實際的探測需求及標準,進行無損檢測范圍的調整,同時采用射線探傷技術對市政道路的結構層進行二次檢測,建立正向的無損檢測結構,針對設定的不同點位測定研究,形成更加完整、具體的檢測體系,獲取相關的數據以及信息之后,進行無損探索分析,獲取最終的檢測結果。
2 實例分析
此次主要是對基于激光雷達的市政道路結構層缺陷無損檢測技術的實際應用效果進行分析與驗證研究,考慮到最終測試結果的真實性與可靠性,選定昆山求正工程質量檢測有限公司下設的G市政道路建設工程作為測試的主要目標對象,采用對比的方式展開分析。利用專業的設備及裝置進行基礎性數據以及信息的采集,匯總整合之后,以待后續使用。根據實際的無損檢測需求及標準,對最終獲取的測試結果比照研究,接下來,融合激光雷達技術,進行初始測試環境的搭建。
2.1 G市政道路工程概況簡述及實例準備
結合激光雷達技術,對G市政道路工程的結構層無損檢測環境進行設置搭建。首先,該道路為復合型的混凝土定位道路,為滿足建設需求,道路下部埋設較多的應用管道,且由于時間較長,再加上需求的層級,管道經歷了多次的處理和改造,當前較難確定道路下具體的位置。現已無法準確定位管道,選定4個路段作為此次測定的主要目標對象,標定為A1、A2、A3、A4,路段長度一共1030m,每一個測定的路段均需要設定對應的定向檢測節點,并調整對應的檢測范圍,節點之間互相關聯,建立數據信息的共享程序,且與初始的信道進行關聯,便于后續數據的傳輸與采集。隨即,以此為基礎,綜合激光雷達技術,先對市政道路下管道進行定位,形成對等的標記之后,通過道路周圍設定的節點進行標定,確保在無損檢測過程中不會對最終的結果造成影響。結合實際的無損檢測需求及標準,進行基礎檢測指標及參數的設置,如下表2所示。

表2 無損檢測基礎指標及參數設置表
根據表2,完成對無損檢測基礎指標及參數的設置與調整。接下來,綜合實際的檢測要求,利用激光雷達對市政道路進行覆蓋式的定位,將反射點和設定的檢測節點進行搭接,形成一一對應的正態檢測感應關系。對各個路段道路結構層的具體特征進行采集與分析,多方向做出判讀,獲取基礎性的數據集信息之后,結合反射節點的設置,進行反射單元檢測距離的計算,如下公式1所示。
公式1中:F表示反射單元檢測距離,n表示重疊覆蓋范圍,a表示傳播距離,k表示檢測次數,表示介電常數。根據上述設定,實現對反射單元檢測距離的計算。將其設定為激光雷達的無損單元檢測標準,形成可控性較強的檢測區域,對路段進行穩定性測試,同時對異常位置作出標定,完成初始測試環境的搭建,接下來,綜合激光雷達技術,進行具體的測驗分析。
2.2 G市政道路工程無損檢測實證分析
在上述搭建的測試環境之中,結合激光雷達技術,對G市政道路工程中的A1、A2、A3、A4四個路段結構層缺陷進行無損檢測。通常情況下,市政道路結構層的缺陷主要可以劃定為以下幾種,分別為脫空、短板、不規則開裂以及搓板等,這部分可以利用雷達對道路的內置結構進行掃描,獲取異常數據和信息之后,匯總整合轉換為數據包之后,傳輸到對應的存儲位置之上,便于后期的分析。隨即,進行測定項目及數值的設置,如下表2所示:
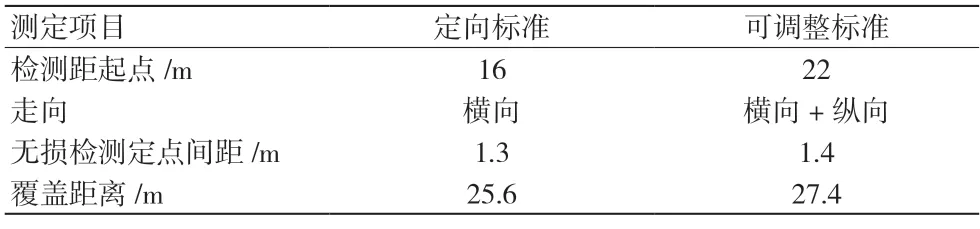
表2 測定項目及數值設定表
根據表2,完成對測定項目及數值的設定。接下來,設置初始的無損檢測雷達波形的檢測傳播時間,在市政道路的結構層中設定基礎的雷達反射接收點位,雷達進行反射信號的傳播,每一個路段需要設定4個雷達檢測節點,依據實際檢測情況及需求的變動,靈活調整反射單元檢測的對應距離,結合實際獲取的數據和信息,需要先進行雷達無損檢測反射系數的計算,如下公式2所示:
公式2中:k表示雷達無損檢測反射系數,θ表示結構層定位覆蓋區域,j表示定位間距,? 表示可識別距離,y表示檢測次數。根據上述測定,完成對雷達無損檢測反射系數的計算。將其設定為激光雷達的檢測反射標準,結合實際的設定和缺陷檢測情況,分別測算出5個路段結構層缺陷的無損檢測耗時反射振幅偏差,如下公式3所示:
公式3中:D表示無損檢測耗時反射振幅偏差,V表示高頻反射帶狀區域,h表示檢測頻次,ι表示定向檢測常值,φ表示雷達初始振幅,f表示基層截面深度。根據上述設定,完成對測試結果的分析,在2.5m、4.5m以及6m的雷達探測高度背景下測定,最終整合分析,具體如下圖3所示:
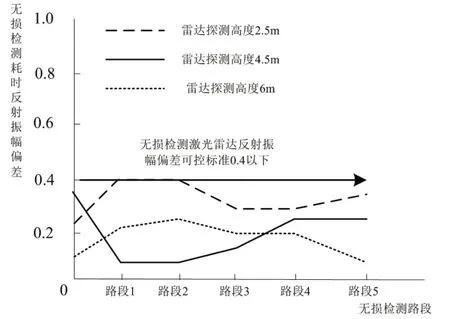
圖3 測試結果對比分析圖示
根據圖3,完成對測試結果的分析:經過5個市政路段的測定,雷達針對2.5m、4.5m以及6m三種高度,最終得出的無損檢測耗時反射振幅偏差均被較好的控制在0.4以下,說明該中無損檢測技術的針對性和穩定性較高,檢測速度及效率更加,誤差可控,具有實際的應用價值。
3 結束語
以上,便是對基于激光雷達的市政道路結構層缺陷無損檢測技術的設計與驗證分析。與初始的無損檢測形式相比對,此次結合激光雷達技術,所構建的無損檢測結構相對更加靈活、多變,具有較強的針對性與完整性,在面對復雜的施工環境及背景時,采用分布式探測的方法,加強對市政道路結構層缺陷的定位精度,降低檢測誤差的出現,實現近似定量的側向分析,為后續工作的執行奠定夯實基礎。
猜你喜歡
中國設備工程(2022年12期)2022-07-11 04:33:00
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
中學生數理化·七年級數學人教版(2021年6期)2021-11-22 07:50:58
中學生數理化·七年級數學人教版(2020年12期)2021-01-18 06:57:46
中學生數理化·七年級數學人教版(2020年12期)2021-01-18 06:57:46
中學生數理化·七年級數學人教版(2019年9期)2019-11-25 07:34:36
中學生數理化·七年級數學人教版(2019年9期)2019-11-25 07:34:34
中學生數理化·七年級數學人教版(2019年12期)2019-05-21 02:53:50
中學生數理化·七年級數學人教版(2019年12期)2019-05-21 02:53:48