基于SMES-SAPF的無源動態(tài)演化和滑模控制策略
2023-09-27 10:35:18齊國慶周建萍茅大鈞從帆平黃祖繁
電力建設(shè) 2023年10期
齊國慶,周建萍,茅大鈞,從帆平,黃祖繁
(上海電力大學(xué)自動化工程學(xué)院,上海市200090)
0 引 言
近年來,由于大量電力電子設(shè)備投入使用,使得電力系統(tǒng)中電能質(zhì)量下降;同時,配電系統(tǒng)的負(fù)載端也呈現(xiàn)多樣化的趨勢,除了常見的線性負(fù)載外,非線性負(fù)載、不平衡負(fù)載、脈沖負(fù)載等先進(jìn)的電氣設(shè)備接入配電系統(tǒng)[1],造成系統(tǒng)中電流波形畸變,無功功率損耗增加等諧波污染問題日趨嚴(yán)重,如何提高電能質(zhì)量是現(xiàn)代配電系統(tǒng)需要解決的重要問題之一[2-5]。
在眾多諧波抑制工具中,并聯(lián)有源電力濾波器(shunt active power filter,SAPF)因其具有響應(yīng)速度快、可控性高、耐壓優(yōu)良、能夠?qū)崿F(xiàn)動態(tài)補(bǔ)償?shù)忍攸c(diǎn),在解決諧波污染問題中被廣泛應(yīng)用和研究。控制策略的選擇會直接影響SAPF的補(bǔ)償性能,傳統(tǒng)的控制策略包括比例積分(proportional integral, PI)控制,比例諧振(proportional resonance,PR)控制、重復(fù)控制等控制策略[6]。PI控制是一種方法簡單、響應(yīng)迅速的線性控制策略,但存在高超調(diào)、魯棒性差的問題,不適用于運(yùn)行狀態(tài)多變的非線性系統(tǒng)。而無源控制是一種根據(jù)系統(tǒng)結(jié)構(gòu)特性,從能量角度對系統(tǒng)進(jìn)行控制的非線性控制策略,目前是非線性系統(tǒng)研究的熱點(diǎn)[7-8],但其自身存在無法適應(yīng)參數(shù)變化和抗干擾能力差的缺點(diǎn)。為此文獻(xiàn)[9]將非奇異終端滑模控制與無源控制相結(jié)合,不僅增強(qiáng)了系統(tǒng)的抗干擾能力,同時也解決了終端滑模控制存在的固有奇異性問題,有效提升了SAPF的補(bǔ)償性能,但滑模控制的抖振問題仍然無法避免。文獻(xiàn)[10]提出了一種基于動態(tài)演化控制(dynamic evolution control, DEC)的非線性控制策略,該控制策略能夠迫使三相補(bǔ)償電流誤差經(jīng)過特定的演化路徑進(jìn)行演化,從而實現(xiàn)控制系統(tǒng)的誤差以指數(shù)形式趨于零的狀態(tài),且不存在抖振。可見,動態(tài)演化控制能更好地彌補(bǔ)無源控制的缺點(diǎn)。
除了改進(jìn)控制策略外,配電系統(tǒng)還可以通過在系統(tǒng)外部增加儲能設(shè)備來增強(qiáng)穩(wěn)定性。目前,研究較為廣泛的儲能裝置有電池儲能(battery energy storage,BES)、超級電容儲能(super capacitor energy storage,SCES)和超導(dǎo)磁儲能(superconducting magnetic energy storage,SMES)幾類[11-13]。然而,電池儲能應(yīng)用在運(yùn)行狀態(tài)多變的電力系統(tǒng)中會造成電池頻繁的充放電,影響電池的使用壽命[14];超級電容儲能中對串聯(lián)電容器的電壓協(xié)同控制一直以來是一個需要解決的難題[15];相較于上述兩種儲能裝置,SMES具有響應(yīng)速度快、抗干擾能力強(qiáng)、循環(huán)次數(shù)多等優(yōu)點(diǎn),在抑制系統(tǒng)振蕩失穩(wěn)和保證系統(tǒng)安全穩(wěn)定運(yùn)行方面有廣闊的應(yīng)用前景[16-18]。文獻(xiàn)[19]將SMES應(yīng)用于模塊化多電平換流器的柔性直流輸電(modular multilevel converter based high voltage direct current, MMC-HVDC)系統(tǒng)中,有效抑制了系統(tǒng)直流振蕩,提高了系統(tǒng)的穩(wěn)定性。文獻(xiàn)[20]設(shè)計了一種由模塊化多電平換流器(modular multilevel converter, MMC)和新型斬波器構(gòu)成的SMES系統(tǒng)拓?fù)浣Y(jié)構(gòu),多個超導(dǎo)磁體共同作用提升了系統(tǒng)的儲能容量。文獻(xiàn)[21]在光伏并網(wǎng)發(fā)電系統(tǒng)中引入超導(dǎo)磁儲能限流器(superconducting magnetic energy storage-fault current limiter,SMES-FCL),不僅使系統(tǒng)具有限流和儲能的雙重作用,還可以有效地提升光伏并網(wǎng)發(fā)電系統(tǒng)的故障穿越能力。
綜上所述,SMES所具有的抑制振蕩和增強(qiáng)穩(wěn)定性的能力能很好地彌補(bǔ)有源電力濾波器抗干擾能力弱的缺點(diǎn)。為此,本文針對超導(dǎo)磁儲能型有源電力濾波器(SMES-SAPF)在諧波治理方面的應(yīng)用進(jìn)行了研究。首先,基于SMES-SAPF的數(shù)學(xué)模型設(shè)計了一種基于歐拉-拉格朗日(Euler-Lagrange, EL)模型的無源動態(tài)演化控制器,該控制器可強(qiáng)制無源控制率中的誤差信號執(zhí)行特定的動態(tài)演化路徑,迫使誤差快速趨于零;其次,根據(jù)直流側(cè)斬波器的數(shù)學(xué)模型設(shè)計了滑模控制(sliding mode control, SMC)器,并采用飽和函數(shù)抑制滑模控制所固有的高頻抖振。最后,通過MATLAB/Simulink建立仿真模型,在不同負(fù)載接入的情況下驗證了所提控制策略的有效性與可行性。
1 SMES-SAPF的數(shù)學(xué)模型
基于超導(dǎo)磁儲能型有源電力濾波器的拓?fù)浣Y(jié)構(gòu)如圖1所示,主要由網(wǎng)側(cè)電源、交流側(cè)有源電力濾波器SAPF、直流側(cè)斬波器和負(fù)載四部分構(gòu)成。其中L0、L1為線路濾波電感,R0、R1為線路等效電阻,C為直流側(cè)電容,Usa、Usb、Usc為三相網(wǎng)側(cè)電壓,isa、isb、isc為三相網(wǎng)側(cè)電流,ila、ilb、ilc為負(fù)載支路電流,ifa、ifb、ifc為補(bǔ)償電流,Uca、Ucb、Ucc為逆變側(cè)輸出電壓,Udc為直流側(cè)電容電壓,R2為非線性負(fù)載電阻,L2為非線性負(fù)載電感,L3為不平衡負(fù)載,L4為脈沖負(fù)載,T為脈沖周期,D0為脈沖負(fù)載占空比,Lsc為超導(dǎo)磁體,isc為流經(jīng)超導(dǎo)磁體的電流,D1、D2為續(xù)流二極管,V1—V8為IGBT功率器件。

圖1 SMES-SAPF拓?fù)浣Y(jié)構(gòu)Fig.1 SMES-SAPF topology
根據(jù)其拓?fù)浣Y(jié)構(gòu),可以得到SMES-SAPF在三相靜止坐標(biāo)系下的數(shù)學(xué)模型:
(1)
(2)
式中:三相輸出電壓Uci滿足:
Uci=SiUdc(i=a,b,c)
(3)
定義開關(guān)函數(shù)Si為:
(4)
將式(1)、式(2)變換到dq坐標(biāo)下可得:
(5)
(6)
式中:ifd、ifd分別為補(bǔ)償電流dq軸分量;ω為角速度;Usd、Usd分別為網(wǎng)側(cè)電流dq軸分量;Sd、Sd分別為開關(guān)函數(shù)dq軸分量;Ucd、Ucq分別為逆變側(cè)輸出電壓dq軸分量。
選取系統(tǒng)狀態(tài)變量為:
(7)
將式(5)改寫為dq坐標(biāo)系下的EL模型:
(8)
式中:M為各項儲能元件的慣性矩陣;J為系統(tǒng)內(nèi)部耦合關(guān)系的反對稱矩陣;R為內(nèi)部耗散性器件的對稱正定矩陣;u為反映系統(tǒng)內(nèi)外能量交互的控制變量。各矩陣表達(dá)式為:
(9)
2 SMES-SAPF的控制策略
2.1 SMES-SAPF數(shù)學(xué)模型無源性分析
假設(shè)一個多輸入多輸出的系統(tǒng):
(10)
式中:v為n階狀態(tài)變量,v∈Rn;u為m階輸入矢量,u∈Rm;y為系統(tǒng)m階輸出矢量,y∈Rm,且y關(guān)于x連續(xù);f(·)為關(guān)于(v,u)的局部Lipschitz函數(shù)[22];h(·)為y的等價函數(shù)。
系統(tǒng)嚴(yán)格無源定義:若系統(tǒng)存在能量存儲函數(shù)H(x),該函數(shù)為連續(xù)可微且半正定,若存在正定函數(shù)G(x),對于任意T>0,此時系統(tǒng)的輸入u、輸出y及能量供給率uTy滿足式(11),則系統(tǒng)是嚴(yán)格無源的[5]。

(11)
對于式(8)所示的EL模型,選取能量存儲函數(shù)為:
(12)
對式(12)求導(dǎo)可得:
(13)
令
(14)
顯然滿足式(11),此時可理解為:由于R為正定矩陣,則xTRx大于零,所以能量存儲函數(shù)H(x)的導(dǎo)數(shù)必然是小于供給率uTy,即外部能量供給率大于系統(tǒng)自身能量存儲率,系統(tǒng)在運(yùn)行時存在能量損耗,符合無源性定義,表明系統(tǒng)是嚴(yán)格無源的。
2.2 無源控制器設(shè)計
設(shè)狀態(tài)變量參考值為:
(15)
參考式(8)可得狀態(tài)變量參考值的EL模型為:
(16)
式中:上標(biāo)“*”代表對應(yīng)變量的參考值。
令狀態(tài)變量誤差為:
xe=x-x*
(17)
將式(8)與式(16)相減可得系統(tǒng)誤差EL模型為:
(18)
選取能量存儲函數(shù)為:
(19)
假設(shè)t為系統(tǒng)運(yùn)行時間,當(dāng)t趨于無窮時,此時狀態(tài)變量x無限接近參考值x*,誤差存儲函數(shù)H(xe)將收斂到0,實現(xiàn)了無源控制,即
(20)
此時的誤差EL模型可等效為:
(21)
對式(19)求導(dǎo)后將式(21)代入可得:
(22)
Rdxe=(R+Rz)xe
(23)
式中:Rd為系統(tǒng)整體阻尼矩陣;Rz為阻尼矩陣,且滿足:
(24)
式中:Rz1、Rz2分別為阻尼項。
將式(23)代入式(18)可得注入阻尼后的誤差EL模型:
(25)
將Jxe移項,令式(25)左側(cè)等于零整理可得系統(tǒng)無源控制率:
(26)
展開式(26)得:
(27)
2.3 無源動態(tài)演化控制器設(shè)計
由于不同負(fù)載的接入,如不平衡負(fù)載、脈沖負(fù)載等,在SMES-SAPF系統(tǒng)中會不可避免地出現(xiàn)高誤差信號,進(jìn)而導(dǎo)致控制器的控制精度大幅度下降,因此,本文采用一種動態(tài)演化理論控制策略更好地調(diào)節(jié)誤差。
動態(tài)演化理論控制是一種非線性控制策略,該方法適用于調(diào)節(jié)輸出信號的誤差,其基本思想是強(qiáng)制誤差信號執(zhí)行一個特定函數(shù)規(guī)定的路徑,即動態(tài)演化路徑,迫使誤差信號按照演化路徑進(jìn)行演化,從而獲得一個快速零誤差的狀態(tài)[23-24]。
定義Y為系統(tǒng)的誤差狀態(tài)函數(shù);Y0為Y的初始值,l為設(shè)計參數(shù)(即演化速率),選擇指數(shù)函數(shù)作為演化路徑,即
Y=Y0e-lt
(28)
對式(28)求導(dǎo)可得動態(tài)演化函數(shù)為:
(29)
設(shè)系統(tǒng)變量誤差為xerr,將式(29)改寫為:
(30)
式中:xerr、Y滿足:
(31)
式中:xref為變量參考值;x為變量實際值;ε為非零系數(shù)。式(30)為動態(tài)演化理論控制的廣義表達(dá)式,通過設(shè)置合適的參數(shù)值(l和ε),可以使補(bǔ)償電壓以指數(shù)級下降的方式趨于零。
定義補(bǔ)償電流誤差dq軸分量為ifde、ifqe,滿足:
(32)
將式(32)代入式(30),即將補(bǔ)償電流實際值dq軸分量ifd、ifq按式(30)規(guī)定的動態(tài)演化路徑進(jìn)行演化,由此可得:
(33)
式中:ifdD、ifqD為經(jīng)演化路徑演化后的實際值。將式(33)代入式(27)可得控制率為:
(34)
控制率Ucd、Ucq滿足:
(35)
即開關(guān)函數(shù)為
(36)
由上式可知,控制率受直流側(cè)電壓Udc的直接影響,保證直流端電壓的穩(wěn)定是系統(tǒng)能穩(wěn)定運(yùn)行的關(guān)鍵。因此,下文將針對直流側(cè)斬波器進(jìn)行控制器設(shè)計。
2.4 直流側(cè)斬波器滑模控制(SMC)器設(shè)計
SMES-SAPF直流側(cè)電容C經(jīng)斬波器與超導(dǎo)磁體Lsc相連,通過控制全控開關(guān)V7、V8的導(dǎo)通和關(guān)斷實現(xiàn)超導(dǎo)磁體的充放電。斬波器有三種工作狀態(tài),如圖2所示,根據(jù)不同的開關(guān)組合可分為充電狀態(tài)、放電狀態(tài)和續(xù)流狀態(tài)。

圖2 直流側(cè)斬波器拓?fù)浣Y(jié)構(gòu)及運(yùn)行狀態(tài)Fig.2 DC side chopper topology and operation status
續(xù)流狀態(tài):開關(guān)V7導(dǎo)通,V8關(guān)斷(或V7關(guān)斷,V8導(dǎo)通),此時流經(jīng)超導(dǎo)磁體的電流isc在V7與D1(或V8與D2)構(gòu)成的回路循環(huán)流通,即超導(dǎo)磁體與直流端電容之間無能量交互。
充電狀態(tài):開關(guān)V7、V8均導(dǎo)通,此時直流側(cè)電容對超導(dǎo)磁體進(jìn)行充電,且直流側(cè)電壓Udc與流經(jīng)超導(dǎo)磁體電流isc滿足:
(37)
式中:ton為開關(guān)V7、V8導(dǎo)通時間;Lsc為超導(dǎo)磁體電感。
放電狀態(tài):開關(guān)V7、V8均關(guān)斷,此時超導(dǎo)磁體對直流側(cè)電容進(jìn)行放電,且直流側(cè)電壓Udc與流經(jīng)超導(dǎo)磁體電流isc滿足:
(38)
式中:toff為開關(guān)V7、V8關(guān)斷時間。
聯(lián)立式(37)和式(38)可得占空比D、Udc、isc三者之間滿足:
(39)
當(dāng)D∈(0,0.5)時,磁體處于放電狀態(tài);當(dāng)D為0.5時,磁體處于續(xù)流狀態(tài);當(dāng)D∈(0.5,1)時,磁體處于充電狀態(tài)。
不同負(fù)載的接入會造成直流端電壓產(chǎn)生超調(diào),且短時間內(nèi)無法恢復(fù)穩(wěn)定,單純靠PI控制魯棒性較差,因此,本文引入滑模變結(jié)構(gòu)控制用于消除SMES-SAPF系統(tǒng)中不同負(fù)載接入對直流側(cè)電壓的影響。
(40)
選取積分滑模面為:
(41)
式中:k1、k2為滑模面控制系數(shù)。
選取指數(shù)趨近率為:
(42)
式中:c1、c2為趨近率系數(shù),趨近率中采用sat飽和函數(shù)削弱滑模控制自身的高頻抖振問題,其中飽和函數(shù)需滿足:
(43)
對式(41)求導(dǎo)后聯(lián)立式(42)、(40)可得:
(44)
將式(39)代入式(44)可得斬波器占空比表達(dá)式為:
(45)
綜上,SMES-SAPF直流側(cè)斬波器滑模控制框圖見圖3。

圖3 SMES-SAPF直流側(cè)斬波器滑模控制框圖Fig.3 SMES-SAPF DC side chopper sliding mode control block diagram
利用Lyapunov穩(wěn)定性判據(jù)對上述滑模面的合理性進(jìn)行判定,選取Lyapunov函數(shù)為:
(46)
對式(46)求導(dǎo)可得:
(47)
顯然式(47)為關(guān)于s的等式,當(dāng)e等于0時,此時系統(tǒng)穩(wěn)定;當(dāng)e不等于0時,即s不等于0,此時系統(tǒng)為非穩(wěn)定狀態(tài),而由Lyapunov穩(wěn)定性判據(jù)可知,只要保證上式小于0即可將e在有限時間內(nèi)收斂到零,故控制參數(shù)需滿足c1、c2、k1、k2都大于0便可保持系統(tǒng)穩(wěn)定。
3 SMES-SAPF的控制系統(tǒng)
根據(jù)上述分析,設(shè)計SMES-SAPF的控制框圖,如圖4所示,由圖可知,該控制系統(tǒng)主要由內(nèi)環(huán)控制器和外環(huán)控制器兩部分構(gòu)成,其中內(nèi)環(huán)控制器包括正負(fù)序電流提取、無源動態(tài)演化控制和調(diào)制模塊等。具體控制過程如下:首先,負(fù)載電流il,abc經(jīng)正負(fù)序分離后,通過低通濾波器輸出補(bǔ)償電流在dq坐標(biāo)系下的參考值;然后補(bǔ)償電流與參考值經(jīng)式(33)進(jìn)行無源動態(tài)演化控制;最后將得到的控制率通過空間矢量脈寬調(diào)制輸出開關(guān)驅(qū)動信號。而外環(huán)控制器包括滑模控制和調(diào)制模塊,控制過程為:直流側(cè)電壓與參考值經(jīng)式(45)進(jìn)行滑模控制,輸出的占空比通過脈寬調(diào)制得到驅(qū)動信號驅(qū)動直流側(cè)斬波器工作。

圖4 SMES-SAPF的控制系統(tǒng)Fig.4 Control system of SMES-SAPF
4 仿真分析
為了驗證超導(dǎo)磁儲能型有源電力濾波器(SMES-SAPF)的諧波治理能力以及所提無源動態(tài)演化控制策略的優(yōu)越性,在MATLAB/Simulink平臺搭建仿真模型,針對系統(tǒng)搭載非線性負(fù)載、不平衡負(fù)載、高頻脈沖負(fù)載三種負(fù)載及其他運(yùn)行狀態(tài)分別進(jìn)行仿真實驗對比,實驗參數(shù)見表1。
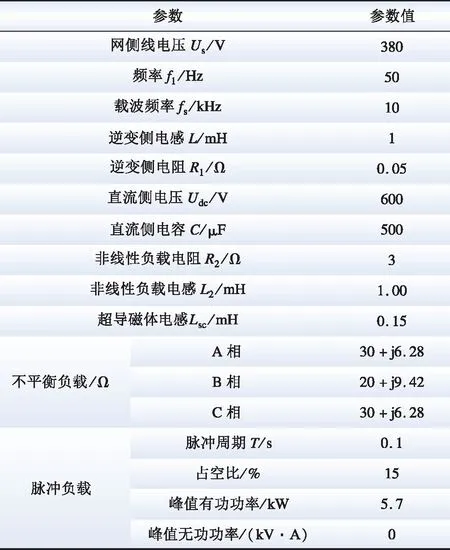
表1 實驗參數(shù)Table 1 Experimental parameters
4.1 算例1
該算例旨在探究SMES-SAPF整體系統(tǒng)的諧波治理能力,測試負(fù)載端在搭載不同負(fù)載情況下諧波對系統(tǒng)的影響。設(shè)置仿真時間為1.20 s,其中在0.25 s時控制器開始工作,在0~0.35 s期間負(fù)載端接入非線性負(fù)載;0.35~0.50 s期間非線性負(fù)載發(fā)生突變,突變電阻為10 Ω;0.60~0.80 s期間不平衡負(fù)載接入;0.90~1.20 s期間脈沖負(fù)載接入,SMES-SAPF分別采用無源控制以及本文所提控制策略,仿真結(jié)果如圖5—8所示。

圖5 SMES-SAPF非線性負(fù)載仿真波形Fig.5 Nonlinear load of SMES-SAPF simulation waveform
由圖5可知,系統(tǒng)負(fù)載端搭載非線性負(fù)載時,由于0.25 s之前控制器未投入工作,網(wǎng)側(cè)電流諧波含量較高,整體波形呈非對稱非正弦狀態(tài);0.25 s時控制器開始工作,對比圖5(a)和圖5(b)可知,使用無源控制的系統(tǒng)雖然可以將網(wǎng)側(cè)電流補(bǔ)償為正弦波形,但在控制器工作和負(fù)載突變的瞬間超調(diào)明顯,約0.04 s之后整體趨于穩(wěn)定,且波形略有畸變,正弦程度較差;而使用無源動態(tài)演化控制的系統(tǒng)網(wǎng)側(cè)電流無超調(diào),負(fù)載突變后電流波形仍能保持平滑穩(wěn)定,可見SMES-SAPF系統(tǒng)在無源動態(tài)演化控制能更好地補(bǔ)償因非線性負(fù)載造成的諧波問題。
0.60 s時負(fù)載端接入不平衡負(fù)載,對比圖6(a)和圖6(b)可知,使用無源控制的系統(tǒng)網(wǎng)側(cè)三相電流明顯不平衡,不平衡度高達(dá)7.13%;而使用無源動態(tài)演化控制的系統(tǒng)網(wǎng)側(cè)三相電流不平衡程度較小,不平衡度僅為1.43%,因此,當(dāng)系統(tǒng)運(yùn)行在不平衡負(fù)載情況下,SMES-SAPF系統(tǒng)在無源動態(tài)演化控制下補(bǔ)償效果更好。

圖6 SMES-SAPF不平衡負(fù)載仿真波形Fig.6 Unbalanced load of SMES-SAPF simulation waveform
0.90 s時負(fù)載端接入脈沖負(fù)載,脈沖周期0.10 s,脈沖占空比為15%,對比圖7(a)和圖7(b)可知,使用無源控制的系統(tǒng)網(wǎng)側(cè)電流受脈沖負(fù)載影響較大,波形失真程度較大,電流脈動處幅值高達(dá)240 A,短時間突然升高的電流必然會對系統(tǒng)的安全運(yùn)行產(chǎn)生影響,顯然無源控制無法有效治理該負(fù)載造成的諧波問題。而使用無源動態(tài)演化控制的系統(tǒng)網(wǎng)側(cè)電流失真程度較小,電流波形脈動處幅值變化較小,基本可實現(xiàn)持續(xù)穩(wěn)定運(yùn)行,即SMES-SAPF系統(tǒng)在無源動態(tài)演化控制下能有效地解決脈沖負(fù)載造成波形脈動以及諧波污染問題。
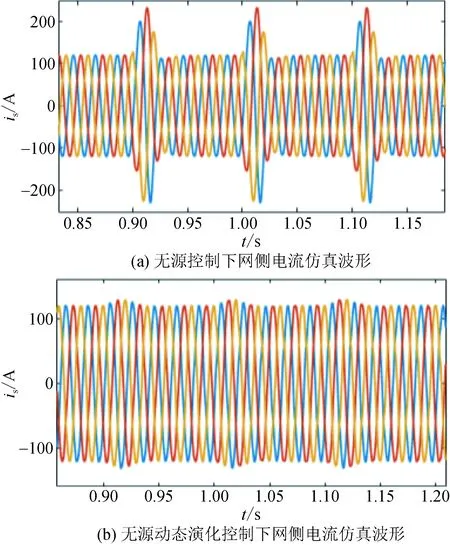
圖7 SMES-SAPF脈沖負(fù)載仿真波形Fig.7 Pulse load of SMES-SAPF simulation waveform
圖8為PI控制和所提控制策略下SMES-SAPF的仿真波形。由圖8(a)可得,在PI控制下0.25 s控制器開始工作時有明顯電流跌落,0.04 s后趨于穩(wěn)定,當(dāng)負(fù)載端接入脈沖負(fù)載時,網(wǎng)側(cè)電流出現(xiàn)較大波動;而無源動態(tài)演化控制策略波形平滑,0.25 s處無電流跌落,且脈沖負(fù)載接入情況下電流波動小,即本文所提控制策略抗擾動能力更強(qiáng)、補(bǔ)償效果更好。

圖8 不同控制策略下SMES-SAPF的仿真波形Fig.8 Simulation waveform of SMES-SAPF under different control strategies
不同控制策略下的電流性能如表2所示,由表2可知,對比PI控制和無源控制,不管是網(wǎng)側(cè)電流的總諧波畸變率(total harmonic distortion,THD)、不平衡度還是躍變幅值,SMES-SAPF在無源動態(tài)演化的控制下,網(wǎng)側(cè)電流諧波含量更少,波動更小,波形更加平穩(wěn),整體諧波治理能力遠(yuǎn)遠(yuǎn)優(yōu)于PI控制和無源控制。

表2 不同控制策略下網(wǎng)側(cè)電流is性能Table 2 Grid current is performance under different control strategies
4.2 算例2
算例2探究系統(tǒng)在不同狀態(tài)下直流側(cè)電壓的運(yùn)行情況,主要驗證在不同控制策略情況下,通過對比SAPF直流側(cè)電壓穩(wěn)壓情況,突出SMES-SAPF系統(tǒng)直流側(cè)斬波器采用滑模控制的有效性。設(shè)置直流側(cè)參考電壓為600 V,仿真時長1.50 s,0~1.20 s之間各負(fù)載接入?yún)⒖妓憷?,此處不再贅述,1.20 s時直流側(cè)參考電壓增大到620 V,1.35 s時減小為600 V,仿真結(jié)果如圖9所示。

圖9 不同狀態(tài)下直流電壓仿真波形Fig.9 DC voltage simulation waveforms in different states
如圖9(a)所示,當(dāng)負(fù)載端搭載非線性負(fù)載時,使用SAPF和使用SMES-SAPF的系統(tǒng)基本均可實現(xiàn)直流側(cè)電壓的穩(wěn)定,但SAPF系統(tǒng)不管采用PI 控制還是滑模PI控制,直流側(cè)電壓距參考值600 V均有一定誤差,其中滑模PI控制下誤差相對較小;而采用滑模控制的SMES-SAPF系統(tǒng)能準(zhǔn)確跟蹤參考值,且上下振幅較小。在0.35 s負(fù)載突變時,SAPF直流側(cè)電壓有明顯超調(diào),在PI控制下0.04 s后電壓趨于穩(wěn)定,穩(wěn)定后的電壓偏離參考值3.5 V,在滑模PI控制下0.05 s后電壓才能趨于穩(wěn)定;而采用滑模控制的SMES-SAPF系統(tǒng)幾乎不受負(fù)載突變的影響,直流側(cè)電壓無超調(diào),仍能準(zhǔn)確跟蹤參考值且保持穩(wěn)定。
當(dāng)系統(tǒng)搭載不平衡負(fù)載時,仿真結(jié)果見圖9(b),負(fù)載接入的瞬間,SAPF系統(tǒng)直流側(cè)電壓有明顯的電壓跌落,跌落電壓高達(dá)16 V,0.03 s后電壓趨于穩(wěn)定,但穩(wěn)定后電壓振幅較大,采用PI 控制上下振幅區(qū)間為593.5~604.4 V,采用滑模PI控制上下振幅區(qū)間為594.8~604.0 V;而SMES-SAPF系統(tǒng)在負(fù)載接入時無電壓跌落,在0.60~0.63 s期間直流側(cè)電壓有小幅度畸變,隨后恢復(fù)穩(wěn)定狀態(tài),上下振幅區(qū)間僅為598.6~601.4 V,幾乎不受不平衡負(fù)載接入的影響。當(dāng)0.9 s系統(tǒng)接入脈沖負(fù)載時,仿真結(jié)果見圖9(c),在每次的脈動處,SAPF系統(tǒng)直流側(cè)電壓也會隨之產(chǎn)生高幅振蕩,采用PI控制后電壓上下振幅區(qū)間為580.0~622.5 V,采用滑模PI控制后電壓上下振幅為573.8~620.6 V,且需0.06 s才能恢復(fù)穩(wěn)定,即SAPF系統(tǒng)難以保證在該負(fù)載接入后直流側(cè)電壓的持續(xù)穩(wěn)定;而SMES-SAPF系統(tǒng)受脈沖負(fù)載影響較小,在負(fù)載脈動時,直流側(cè)電壓仍可保持穩(wěn)定且無振蕩。
在1.20 s時直流側(cè)參考電壓突然增大到620 V,1.35 s時突然減小到600 V,仿真結(jié)果見圖9(d),SAPF系統(tǒng)直流側(cè)電壓也會隨參考電壓的變化而變化,但在參考電壓突增時,經(jīng)PI控制下電壓約0.04 s后趨于穩(wěn)定,穩(wěn)定后的電壓距參考值約有0.6 V的誤差,在參考電壓突減時,穩(wěn)定后的電壓距參考值約有1.5 V的誤差;采用滑模PI控制后,直流側(cè)電壓約0.02 s后趨于穩(wěn)定,且誤差較小;而采用滑模控制的SMES-SAPF系統(tǒng)不管是參考電壓突增還是突減,均可保證在0.01 s之內(nèi)直流側(cè)電壓準(zhǔn)確無誤地跟蹤參考值。
不同控制策略下直流側(cè)電壓性能如表3所示。由表3可知,不同負(fù)載的接入幾乎不會影響SMES-SAPF直流側(cè)電壓的穩(wěn)定,且能始終保持較小電壓幅值區(qū)間,均得益于超導(dǎo)磁儲能裝置特有的抑制振蕩的特性,可見該儲能裝置的應(yīng)用在提高電能質(zhì)量和改善電力系統(tǒng)穩(wěn)定性方面具有很大潛力。

表3 不同控制策略下直流側(cè)電壓Udc性能分析Table 3 DC side voltage Udc performance analysis under different control strategies
5 結(jié) 論
本文在有源電力濾波器的直流側(cè)增加儲能設(shè)備構(gòu)成新型拓?fù)浣Y(jié)構(gòu)——超導(dǎo)磁儲能型有源電力濾波器,并針對不同負(fù)載接入時,常規(guī)控制策略補(bǔ)償精度低的問題,提出了無源動態(tài)演化控制策略;同時為穩(wěn)定直流電壓,對直流側(cè)斬波器采用滑模控制,通過實驗得到如下結(jié)論:相比常規(guī)有源電力濾波器,超導(dǎo)磁儲能型有源電力濾波器能更有效地解決不同負(fù)載接入時所引起的電能質(zhì)量問題,且采用無源動態(tài)演化控制策略,能顯著提高SMES-SAPF的補(bǔ)償精度及其抗干擾能力;同時直流側(cè)斬波器采用滑模控制可以實現(xiàn)直流側(cè)電壓準(zhǔn)確無差地跟蹤給定值并保持穩(wěn)定,且能消除負(fù)載變化時直流側(cè)電壓波動對系統(tǒng)的影響。
猜你喜歡
工業(yè)設(shè)計(2022年8期)2022-09-09 07:43:20
軍民兩用技術(shù)與產(chǎn)品(2021年10期)2021-03-16 06:05:30
能源工程(2020年6期)2021-01-26 00:55:22
北京測繪(2020年12期)2020-12-29 01:33:58
裝備制造技術(shù)(2019年12期)2019-12-25 03:06:46
山東冶金(2019年3期)2019-07-10 00:54:04
中國洗滌用品工業(yè)(2019年4期)2019-05-11 09:27:34
消費(fèi)導(dǎo)刊(2018年10期)2018-08-20 02:57:02
家庭影院技術(shù)(2017年9期)2017-09-26 03:41:45
通信電源技術(shù)(2016年1期)2016-04-16 04:57:26