基于STM32 的多功能控制板設計
2023-09-27 10:42:56尹成娟張曉榮郭棟梁牛亮
電子制作 2023年19期
尹成娟,張曉榮,郭棟梁,牛亮
(山西大眾電子信息產業(yè)集團有限公司,山西太原,030024)
0 引言
技術是戰(zhàn)術的基礎,高新技術在軍事領域的應用,推動著戰(zhàn)爭形態(tài)的變化[1]。無人機以其尺寸小、重量輕、造價較低、機動性好、適應性好等特點目前在軍事和民用方面都得到了廣泛的應用[2]。隨著高新技術的發(fā)展,無人機在軍事領域帶來的重大變革儼然成為軍事熱點技術之一。因此,無人機信息的采集對于提升空中打擊能力具有重要的軍事意義。本文設計了一種基于STM32 的多功能控制板,作為某型無人機的測試工裝核心板,用于滿足該型無人機信息采集的需求,且采集到的信息通過通信模塊打包發(fā)送至上位機,供上位機后續(xù)處理。此外,該測試工裝具有左右兩個手柄,手柄信息通過多功能控制板上的FPGA 采集,使得該測試工裝兼具發(fā)控功能。
1 系統(tǒng)總體設計
多功能控制板以STM32F103ZET6 為主控芯片,各功能模塊由電源模塊、通信模塊、AD 采集模塊、IO 輸入采集模塊、手柄開關量采集模塊以及手柄力敏信息采集模塊等幾部分組成。系統(tǒng)框圖如圖1 所示。
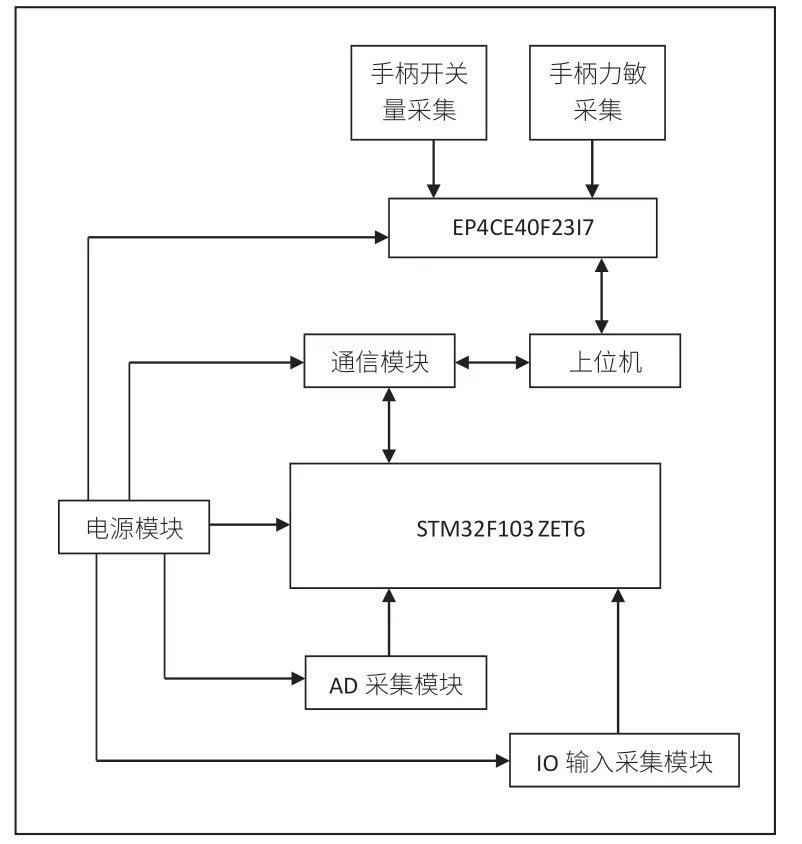
圖1 系統(tǒng)框圖
2 硬件設計
■2.1 主控芯片
主控芯片是硬件設計的核心部件,也是連接各功能模塊的重要橋梁。主控芯片的選擇本著夠用為度,留有余地,相互兼容,質量優(yōu)先的原則。本設計主控芯片的作用是采集外部電壓值以及IO 輸入,并通過通信模塊與上位機實現(xiàn)數據通信。
通過對比分析,本設計采用了單片機STM32F103ZET6為主控芯片。單片機的最小系統(tǒng)由晶振部分、電源部分以及復位部分等組成。STM32F103ZET6 微處理器是STM32 系列的增強型芯片,該芯片具備72MHz 時鐘頻率,能實現(xiàn)高端運算。內嵌128KB FLASH 程序存儲器,擁有UARST、SPI 等串行接口。更重要的是它擁有最快1μs 轉換速度的ADC,如此快速采集,高性能的ADC 非常適用于數據的快速采集和快速處理上,這也是本系統(tǒng)選擇它作為核心控制器的一個重要原因[3]。
■2.2 電源模塊
電源模塊是為電路板上各個數字或模擬負載提供供電的設備。適當地電源模塊選型能夠為設備的正常工作提供重要的保障。多功能控制板供電輸入為12V,本設計選用美國寶威電源(Power-One)公司生產的YS12S16-0G 型DC-DC 轉換器作為DC12V 轉DC5V 的電源模塊。該模塊輸入電壓范圍為9.6~14V,無最小負載要求,具有自動復位輸出過流保護、超溫自動復位保護以及高效率,無需散熱等特點。此外,多功能控制板還需要DC5V 轉DC3.3V、DC5V 轉DC1.8V、DC5V 轉DC1.2V 以及DC5V 轉DC2.5V 的電源芯片。本設計分別采用LT1963AEST-3.3、LT1963AEST-1.8、LT3022IMSE-1.2 以及LT1963AEST-2.5型電源芯片,分別產生DC3.3V、DC1.8V、DC1.2V 以及DC2.5V,為STM32 以及其他功能模塊提供電源。該部分電源芯片屬于低壓差線性穩(wěn)壓器(LDO),其特點是將多余的功率轉化為熱量來達到穩(wěn)壓的效果,該類電源芯片適合低功耗、輸入輸出壓差較低的場合。
■2.3 通信模塊
通信模塊以以太網控制器W5300 為主芯片,實現(xiàn)STM32 與上位機之間的通信。W5300 是韓國Wiznet 公司生產的以太網協(xié)議芯片,支持8個獨立端口同時連接,通信速率可達到50Mbps[4]。W5300 是一款0.18μm CMOS 工藝的單芯片器件,內部集成10/100M 以太網控制器MAC 和TCP/IP 協(xié)議棧。W5300 穩(wěn)定可靠,廣泛應用于高性能、低成本的Internet 嵌入式領域[5]。此外W5300 可以支持直接尋址和間接尋址兩種主機接口模式,用戶也可以通過高性能配置使其具有更高的性能。
■2.4 AD 采集模塊
AD 采集即利用單片機的ADC 功能把輸入到單片機引腳的模擬電壓值轉換成數字信號,從而采集到單片機引腳的電壓值。本文AD 采集模塊分為兩部分,一部分為大電壓信號采集,另一部分為多種電壓信號采集。
通常,單片機的ADC 引腳允許輸入的電壓值比較低,STM32 引腳的輸入電壓不能大于3.3V,否則會導致單片機損壞。本文的大電壓信號采集中,單片機需要采集的電壓大于3.3V,因此該部分功能在AD 采集前需設置運放來縮小直接采集到的電壓值,以達到保護芯片的作用。本設計采用的運放型號為圣邦微的SGM8424,其具有低功耗、高電壓的特點。大電壓信號采集原理圖如圖2 所示。
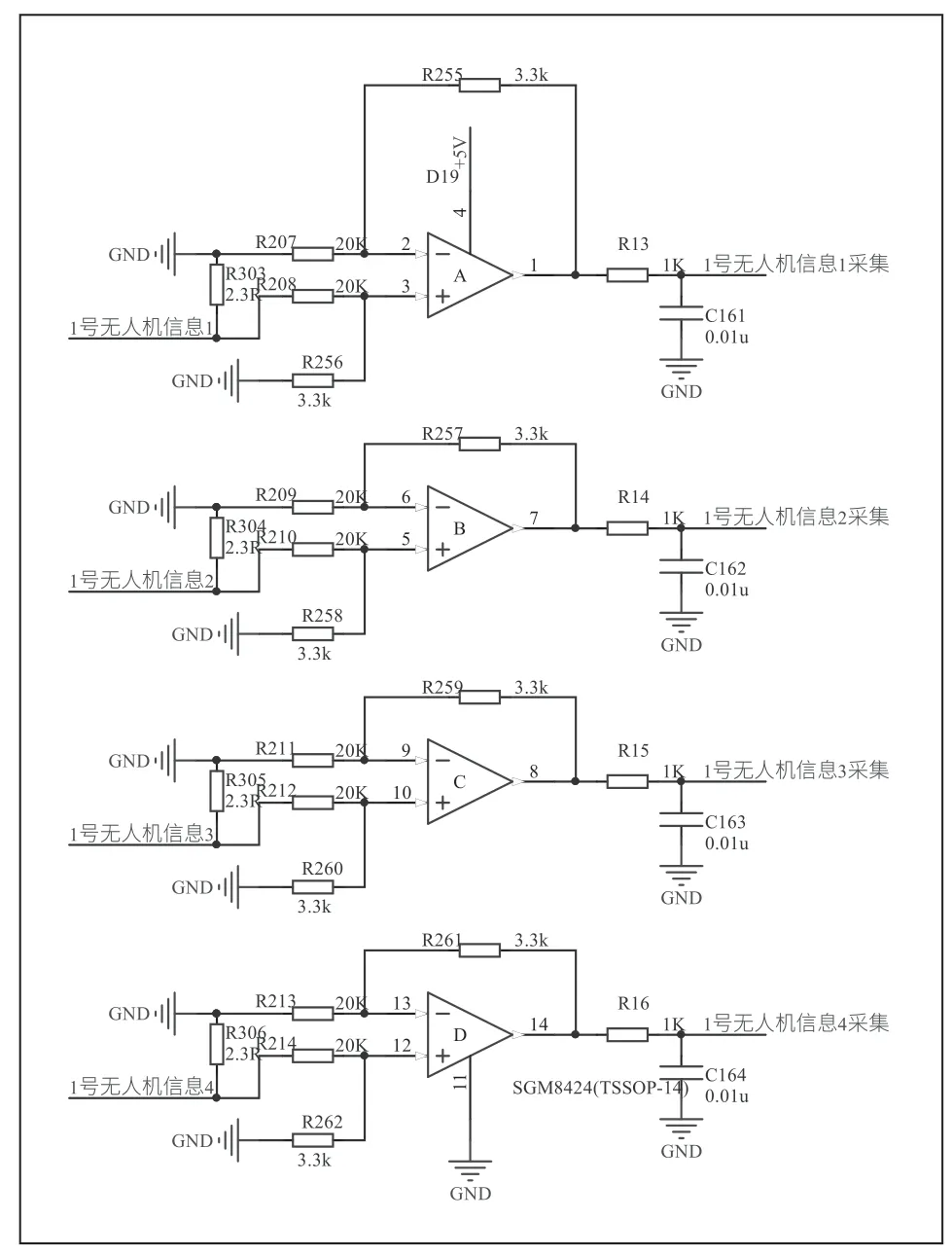
圖2 大電壓信號采集原理圖
多種電壓信號采集即單片機通過采集到的多種電壓值來判斷外部信號的種類。由于本設計選用的單片機STM32F103ZET6 其具有AD 功能的管腳最多有21 個,而大電壓信號采集有20 路,故多種電壓信號采集功能需要用外部AD 采集來實現(xiàn),本文選用的外部AD 采集芯片為AD7993。AD7993 采用單電源工作,其電壓范圍為2.7V至5.5V,具有低功耗、4 通道、10 位高速的特點。此外,AD7993 提供與I2C 接口兼容的串行接口,通過I2C 總線與主芯片STM32 連接控制。多種電壓信號采集在AD 采集前同樣使用圣邦微的SGM8424 作為電壓跟隨器,起到隔離的作用,保護后端電路。并且,電壓跟隨電路可以通過提高采集信號負載能力的方式來確保穩(wěn)定采集到外部模擬信號。SGM8424 驅動電路原理圖如圖3 所示。AD7993 采集電路原理圖如圖4 所示。
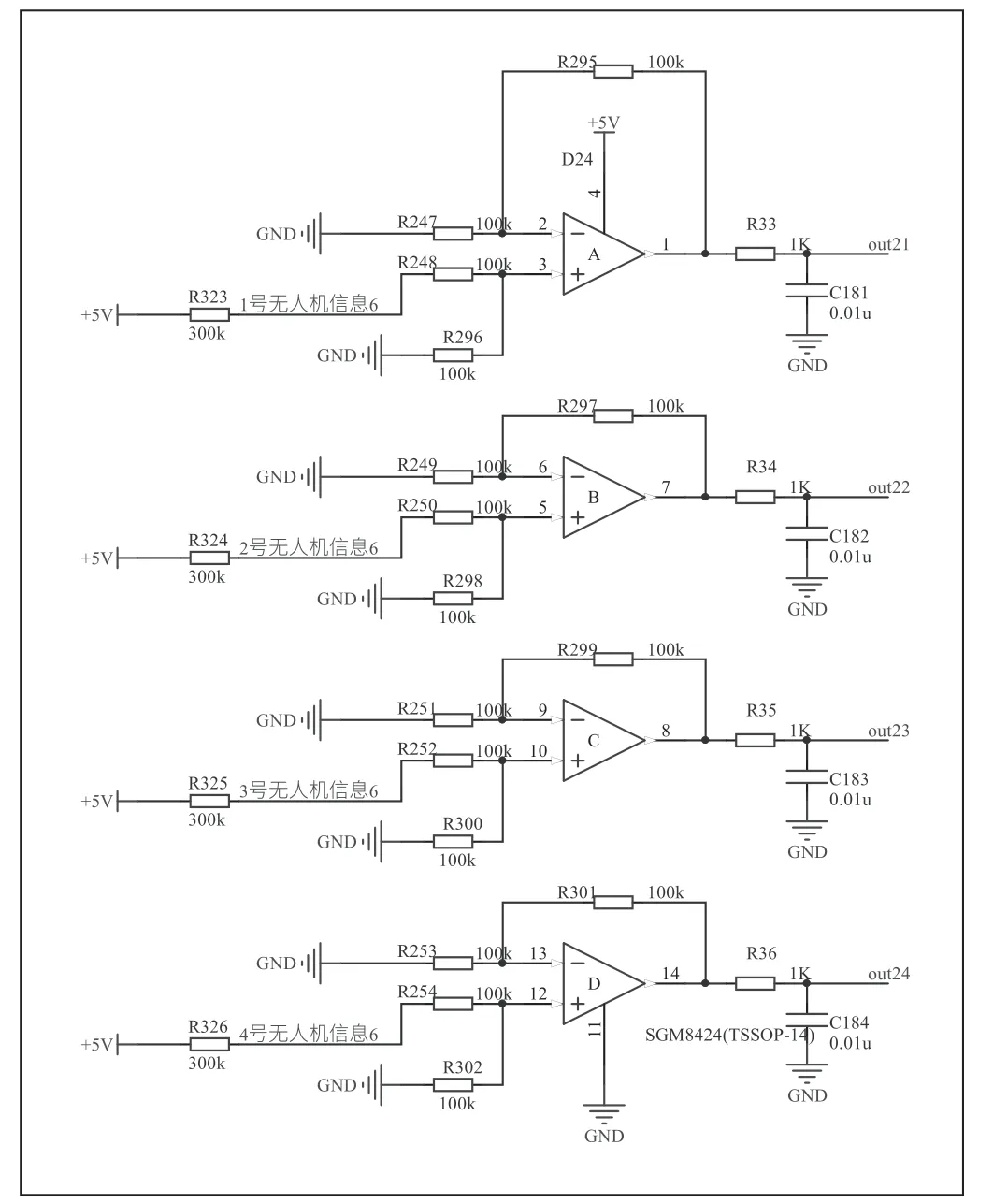
圖3 SGM8424 驅動電路原理圖
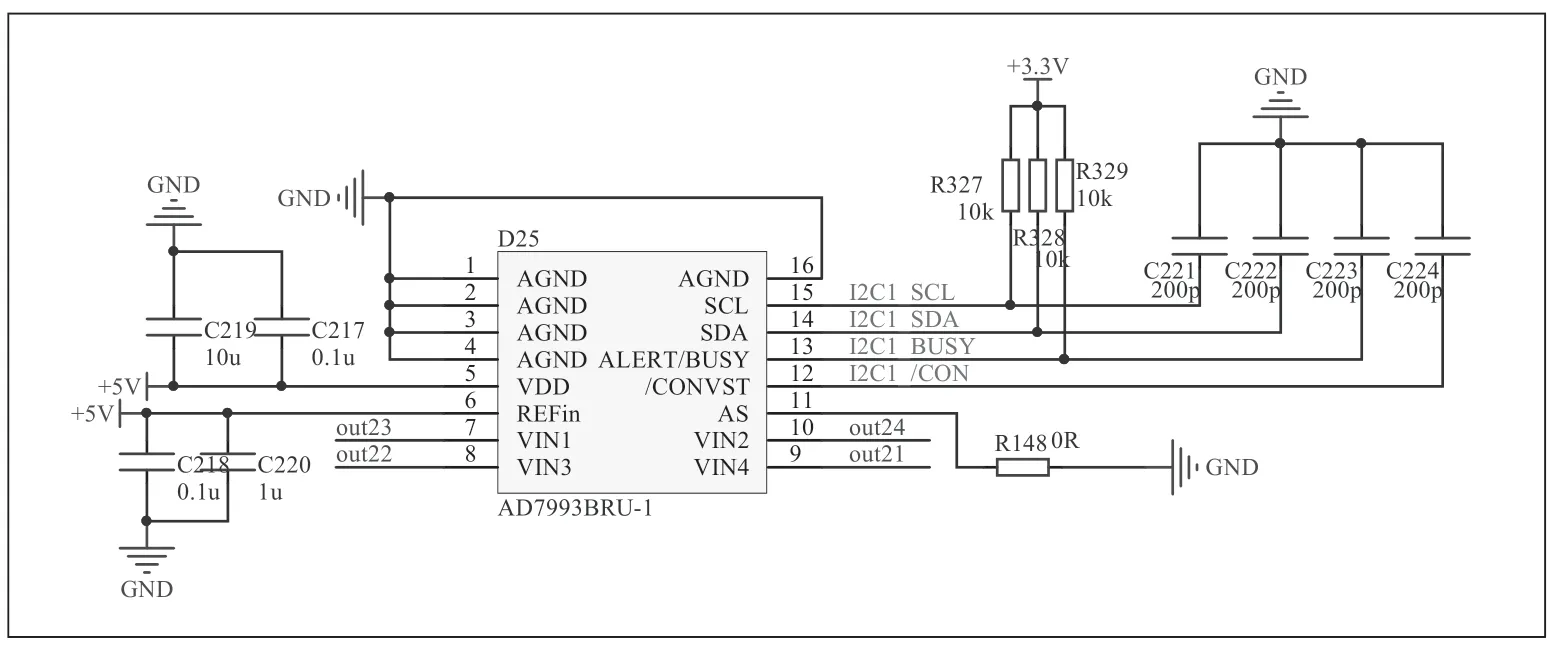
圖4 AD7993 采集電路原理圖
■2.5 IO 輸入采集模塊
IO 輸入采集模塊通過STM32 具有I/O 功能的管腳來實時采集無人機IO 信息,并將采集到的數據通過以太網打包發(fā)送至上位機。
■2.6 手柄開關量采集模塊
測試工裝具有左右兩個手柄,當手柄按鍵發(fā)生動作時,多功能控制板上的FPGA 檢測其狀態(tài),并將狀態(tài)上報上位機。多功能控制板的FPGA 選用EP4CE40F23I7型現(xiàn)場可編程門陣列。其具有328 個I/O 管腳,邏輯元件數量為39600,電源電壓為1.15~1.25V,工作溫度為-40℃~100℃。
■2.7 手柄力敏信息采集模塊
手柄力敏信息采集模塊同樣采用多功能控制板上的EP4CE40F23I7 型現(xiàn)場可編程門陣列實時采集手柄力敏操作桿422 信息并將力敏信息上報上位機。FPGA 采集力敏信息前要通過隔離422 模塊,該模塊選用亞德諾半導體公司生產的ADM2587EBRWZ 型隔離數據收發(fā)器。該收發(fā)器采用3.3V/5V 單電源供電,具有±15KV ESD 靜電保護功能。其內部包含隔離式DC-DC 電源,不需外部隔離模塊。此外,該模塊具有熱關斷和限流的特點,能夠有效防止輸出短路和總線爭用而功耗過大的情況出現(xiàn)。ADM2587EBRWZ 型隔離數據收發(fā)器廣泛應用于隔離式RS-485/RS-422 接口以及多點數據傳輸系統(tǒng)。手柄力敏信息采集模塊電路原理圖如圖5所示。

圖5 手柄力敏信息采集原理圖
3 PCB 設計
PCB 設計屬于系統(tǒng)的硬件設計,是整個設計的目的,也是電路原理圖設計的載體,PCB 設計為電子信息產業(yè)的高速發(fā)展奠定了重要的基礎。本設計選用Protel 軟件開發(fā)商Altium公司推出的Altium Designer作為硬件開發(fā)平臺。該平臺可以實現(xiàn)電路原理圖繪制、電路仿真、PCB 繪制等功能。
本設計采用6 層PCB 結構,第一、三、五、六層為信號層,第二層為接地層,第四層為電源層。在對系統(tǒng)PCB 進行設計時,有以下幾個事項需要注意:電源部分要設置足夠多的濾波電容,且每一級電源輸入端應設置保險,防止電路故障串級;晶振內含石英晶體,受到撞擊易斷裂,為防止晶振損壞,晶振不能距離板邊太近,且晶振下方不能布信號線,防止造成干擾;422 信號與以太網信號布線需使用差分線,差分線信號大小相等,方向相反,具有更高的抗干擾能力與傳輸速率,且信號傳輸質量較高;布線應避免形成環(huán)路;整塊印制板應布線、打孔均勻,避免出現(xiàn)疏密不均的情況。除此以外,電路印制板設計還應考慮電磁兼容性、成本等因素。本設計實物圖如圖6 所示。

圖6 實物圖
4 軟件設計
主控芯片STM32F103ZET6 應用系統(tǒng)的開發(fā)除了得益于正確的硬件電路設計以外,還依賴于系統(tǒng)軟件的開發(fā)。一個優(yōu)秀的系統(tǒng)軟件具有流程清晰、結構合理且易于調試與移植等特點。此外,軟件的抗干擾設計也能提高整個應用系統(tǒng)的抗干擾能力。
本設計的編程語言采用C 語言,軟件開發(fā)環(huán)境為Keil μVsion4。軟件主要完成三種信號采集:20 路大電壓信號采集、多種電壓信號采集和I/O 輸入狀態(tài)采集。軟件具體工作原理如下:
STM32 處理器上電后首先初始化W5300 網絡傳輸芯片、AD7993 電壓采集芯片、STM32 自帶的3 個ADC 模塊以及I/O 管腳配置等。
處理器每隔5ms 讀取內部的3 個ADC 轉換出的20 路電壓數字量,并將采集到的信息打包后通過W5300 上報上位機,上位機進行后續(xù)處理;處理器實時監(jiān)控AD7993 轉換出來的模擬電壓信號,當信號發(fā)生改變時,把最新的電壓值上報上位機;處理器實時監(jiān)控I/O 管腳的電平信號,當電平信號發(fā)生改變時,把最新的狀態(tài)上報上位機。軟件流程圖如圖7 所示。

圖7 軟件流程圖
5 結論
信息時代的到來,使人們的生活方式發(fā)生了巨大的改變,無人機作為新時代的產物,具有體積小、航程遠及無人駕駛的特點,屬于高精尖科技產品,目前越來越受到軍事和民用領域的青睞,廣泛地應用無人機技術[6]。隨著人工智能、數據處理、新型材料等各類高新技術的不斷發(fā)展,無人機的作戰(zhàn)效能必將得到空前拓展,其必將成為影響未來戰(zhàn)場勝負的關鍵因素[7]。本文設計的多功能控制板以STM32F103ZET6 為主控芯片,實現(xiàn)無人機信息的AD 采集以及IO 輸入采集,并通過以太網控制器W5300 將采集到的信息上報上位機。同時,該多功能控制板兼具發(fā)控功能,可以將某型無人機測試工裝的左右手柄信息采集并上報上位機。經實驗證明,本文設計的多功能控制板工作穩(wěn)定、性能良好,滿足某型無人機信息采集的要求。
猜你喜歡
鴨綠江(2021年35期)2021-04-19 12:24:18
考試與評價·高一版(2020年6期)2020-11-02 02:45:24
電子制作(2019年13期)2020-01-14 03:15:28
電子制作(2019年15期)2019-08-27 01:12:10
電子制作(2019年9期)2019-05-30 09:42:02
藝術啟蒙(2018年7期)2018-08-23 09:14:18
電子制作(2018年11期)2018-08-04 03:25:42
海峽姐妹(2017年7期)2017-07-31 19:08:17
Coco薇(2017年5期)2017-06-05 08:53:16
鑿巖機械氣動工具(2016年3期)2016-03-01 04:00:25
