超長隧道交通運行狀態主動監測方案分析
2023-10-08 04:28:36余雪娟王燕薛勇
中國公路 2023年16期
關鍵詞:系統
余雪娟 王燕 薛勇
(1.江蘇省交通工程建設局,江蘇 南京 210001;2.江蘇百盛工程咨詢有限公司,江蘇 南京 210001;3.江蘇百盛信息科技股份有限公司,江蘇 南京 210001)
1 背景
超長隧道長管狀封閉空間造成了洞內外亮度差異懸殊、環境照度低、交通空間受限等影響交通安全的因素。近年來,交通擁堵、交通事故等問題愈演愈烈,加之隧道環境位置特殊,運營安全面臨嚴峻的考驗。
海太過江通道對隧道全天時、多維度的安全態勢感知方案和運行安全態勢分析方法提出了新的要求。本文通過分析以車輛為目標的交通主體,利用全過程的精細化監測數據,面向隧道整體開展車輛檢測、識別、跟蹤,判別交通安全風險、發現風險點,形成海太過江隧道交通運行狀態實時、主動的監測方法與方案,以期提升海太過江通道的安全運營管理水平,為我國其他隧道運營管理工作提供示范和參考。
2 國內外研究現狀
國內外已經研發了一些成熟的隧道交通監測系統。例如,美國的分布式公路隧道監控系統[1],挪威Ryfast隧道的雙攝像監測系統[2]等。國內應用于秦嶺終南山隧道、上海長江隧道與大連白銀山隧道等的交通監測系統[3,4]。這些系統以交通參數獲取、目標行為分析、事件檢測等宏觀交通信息開展應用。
近年來,隧道的智能化監控與交通安全研究發展迅速,其中隧道交通監測的主要重點在于車輛特征建模、車輛時空動態模型構建、目標再識別技術這3個方面,采用機器視覺和人工智能領域的方法[5],針對實際安全問題,開展應用研究并探討監測系統設計方案[6]。
3 超長隧道的交通狀態監測問題分析
超長隧道交通事故的發生概率相較于普通路段而言較高,因此其交通狀態對智能化監測系統的需求更加迫切。公路隧道通常可劃分為Z1-Z4四類區域,如圖1所示。隧道內外的亮度差別產生的“黑洞”現象,使得隧道入口區域(Z2區和Z3區)的事故率較高。隧道的嚴重事故率與長度和交通負荷聯系密切,超長隧道Z4區域覆蓋距離更長,重大交通事故更有易發生在Z4區和Z1區。

圖1 隧道區域劃分示意圖
當前廣泛應用的系統及其子系統為實現隧道舒適、安全、高效地運營提供了保障。然而,基于傳統設計觀念,使得系統存在諸多不足有待改善,主要表現在:隧道監控子系統的聯動性差,眾多子系統較難形成統一的數據元組,數據性能較難發揮;隧道交通控制系統的控制模式與智能水平相對滯后,交通目標感知效率低,識別精度差,較難全時空感知交通目標異構數據;監測系統使用的設備過于單一,視頻和雷達各自優缺點明顯,在數據精度、覆蓋范圍等方面未能優勢互補,不利于提升基礎監測數據的質量;隧道交通監測點數據孤立,難以面向全隧道獲取精細化的運行全過程數據,不利于感知與分析交通安全態勢,對降低風險、事前引導、隱患消除等較難發揮價值。
4 面向海太隧道的交通安全運行解決方案
針對現有大量廣泛使用的隧道安全監測系統存在的問題,本文從4個核心問題和解決方法出發構建解決方案,方案涉及的核心問題關系示意圖如圖2所示。
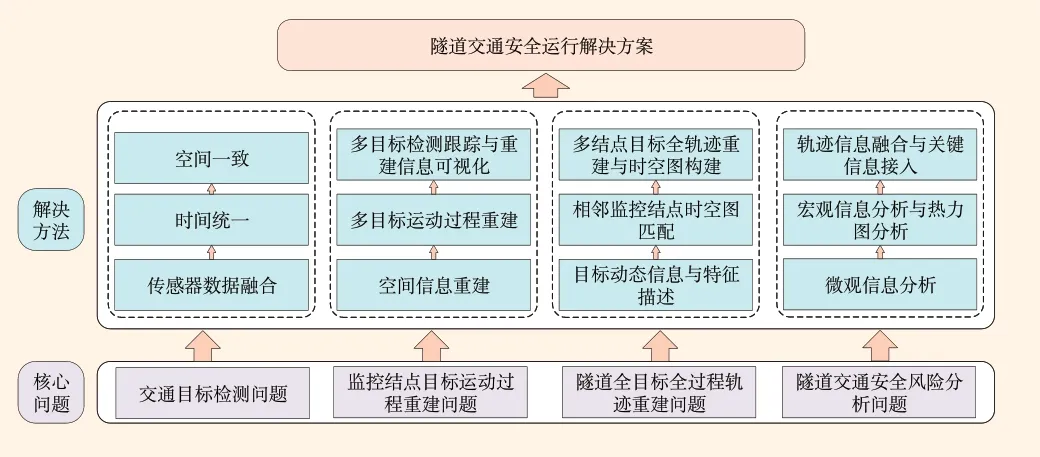
圖2 交通安全運行解決方案核心問題與解決方法關系示意圖
4.1 隧道傳感器數據融合的交通目標檢測問題
在長大隧道的交通環境下,單一的傳感器因設備原理具有明顯的優缺點,較難解決隧道中環境復雜、低視角所帶來的問題。例如,視頻直觀、易理解、可靠性高,但受制于隧道空間,在安裝點近端監測性能好,在遠端受制于圖像分辨率。毫米波雷達在目標測速、定位、流量計算等應用中優勢明顯,但受制于其工作原理,在安裝點近端覆蓋有限,在監控遠端數據存在抖動,且對車輛遮擋、停車、拋灑物等處理邏輯較復雜,可靠性較低。兩種傳感器的互補優勢主要表現在:視頻可彌補雷達點云數據不直觀的問題;利用視頻近端易覆蓋和精度高的特點,可彌補雷達近端難覆蓋和數據抖動的缺點,利用雷達覆蓋范圍廣,可彌補視頻低視角和遠端目標圖像尺寸小的缺點;利用雷達抗強光、灰塵、煙霧等的優勢,可彌補視頻不足,利用視頻目標檢測、跟蹤邏輯可彌補雷達在遮擋、靜止、數據抖動等方面的不足。
實際使用中面臨3個因素的影響:時間不統一,即視頻和雷達設備數據采樣率不一致;空間不一致,即兩種設備覆蓋范圍不一致;數據融合難,即視頻和雷達對目標位置、速度等信息的感知具有理論上的誤差,需要對兩種數據實施數據級的融合。針對這三個問題,設計中利用視頻和雷達的監控重合區開展設備參數標定,實現兩種設備的統一空間構建。在一致的空間中,通過車輛目標位置的唯一性,矯正數據時間。基于時空關系,對視頻中的目標位置數據坐標與雷達點云計算的目標位置坐標進行時空標準化,通過構建數據錨點的生成方法,評價分析雷達點交通目標待選數據與視頻估計數據,并構建深度學習網絡,實現視頻與雷達數據級融合。
4.2 監控單節點交通目標運動過程重建問題
單節點的目標運動過程重建需要解決幾個關鍵問題:多目標空間信息重建,即從目標圖像位置二維信息,跨維度構建為三維空間信息;多目標運動過程重建,即對監控區域內的目標軌跡重建,獲得單個監控節點下的運動數據。這是開展目標運動過程分析和行為分析的基礎;多目標檢測和跟蹤,即針對遮擋、視角等影響因素,構建有效的多目標檢測、識別、跟蹤方法與模型,提高目標感知信息的精度。這是實現對交通狀態精細刻畫的基礎;多目標重建及監測信息的可視化,即實現對監測路段車輛位置、車間距離、車道占有率、車型分類、擁堵狀況等量化信息的可視化。
針對上述問題,海太方案中利用多節點相機和雷達聯動的全時空信息,設計出基于深度檢測網絡的優化模型來提取目標軌跡的運動特性。通過分析所有目標軌跡數據的時空映射關系與運動特征,構建目標的完整運動軌跡與參數。這種設計可利用高精度的運動過程重建信息開展交通目標的分析,能夠改善誤報、多報和漏報等問題,也更有利于提高管理效率。
4.3 隧道交通全目標全過程軌跡重建問題
在超長隧道內,獨立監測結點得到的離散數據無法有效解決多種實際問題,一是難以感知多個移動目標的運動全過程,難以獲取監控盲區的目標軌跡信息;二是難以解決多目標跨設備跟蹤檢測問題。傳統交通事件檢測方案,僅依賴于單個監測結點開展,較難利用全過程軌跡的巨大優勢降低誤報率和提升效率。
海太隧道方案主要采用算法層和模型層兩個核心設計解決相應問題。在算法層,主要通過深度學習網絡,引入數據片段時間戳為輸入,設計目標運動信息網絡、類別判別網絡和可視化網絡3個分支,組建多目標跟蹤模型和算法提取目標軌跡。在模型層,利用時間標簽和時空約束構建多個時空片段排序方法和盲區軌跡補全方法,最終獲得長隧道車輛全軌跡和時空圖。這種設計可以構建出面向整個隧道路段的精細化反映實況的可靠基礎數據。
4.4 隧道交通安全風險分析問題
在超長隧道安全管理和運營的需求下,當前系統體現隧道交通風險發生的位置、空間影響范圍、時間影響范圍等信息較為困難,主要原因是傳統的隧道交通安全分析方法存在3個方面的缺陷:評價標準主觀,結果主觀因素比例過大,難以支撐對隧道交通的動態分析;表征數據不全面,對不同隧道路段事件行為的類型分布、時空分布等特征和事件涉及的車輛特征難以表達全面;事件分析的關聯性不足,導致異常事件分析的準確度不高。
針對上述不足,在海太全隧道的交通目標運行狀態分析方案中,主要通過關鍵數據的介入,以軌跡作為數據載體,將高維空間信息與低維時間信息相融合,形成全過程融合車型、車溫、軸重、隧道行車環境等識別信息,以及“兩客一危”系統的貨物種類等軌跡數據包,構建目標全過程的安全時空圖。從微觀角度看,可挖掘車輛在當前隧道的位置、車速、運動方向、車間距等信息。從宏觀角度看,可挖掘全體監測目標在超長隧道的分布、車速狀態、隧道車流量、潛在風險點位置與影響范圍等信息,形成宏觀到微觀的交通運行狀態數據和風險感知數據。
5 超長隧道智能交通安全監測系統架構
在海太隧道的交通安全主動監測系統構建中,設計重點為以車輛目標監測、交通事件檢測、交通安全風險分析為核心的交通安全態勢實時監測及分析應用系統,并基于計算平臺開發成套軟硬件,系統構架示意圖如圖3所示。
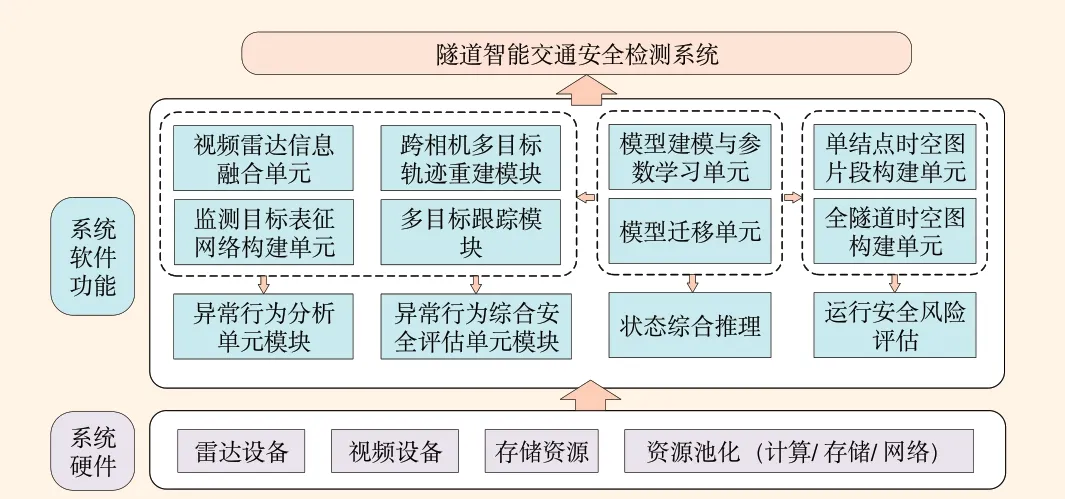
圖3 隧道智能交通安全監測系統構架示意圖
系統軟件功能模塊主要包括視頻雷達信息融合、監測目標表征網絡構建、跨相機多目標軌跡重建與跟蹤、可信高效的異常行為分析和異常行為綜合安全評估幾個單元模塊。各模塊之間相互關聯,層層遞進,從模型建模、參數學習、模型遷移到狀態綜合推理評估等角度實現從方法研究到模型算法落地的整個流程系統架構。硬件部署根據雷達和視頻在隧道場景下不同監控區域的數據可靠性,將雷達和視頻設備有效檢測范圍銜接,發揮兩者優勢,構建設備管理、數據傳輸無障礙的高效隧道監測系統。
猜你喜歡
工業設計(2022年8期)2022-09-09 07:43:20
軍民兩用技術與產品(2021年10期)2021-03-16 06:05:30
北京測繪(2020年12期)2020-12-29 01:33:58
裝備制造技術(2019年12期)2019-12-25 03:06:46
制造技術與機床(2019年10期)2019-10-26 02:47:06
中國洗滌用品工業(2019年4期)2019-05-11 09:27:34
鐵道通信信號(2018年5期)2018-06-28 03:06:24
家庭影院技術(2017年9期)2017-09-26 03:41:45
知識經濟·中國直銷(2017年5期)2017-06-15 20:28:19
通信電源技術(2016年6期)2016-04-20 06:21:32
