模仿蝙蝠的回聲定位
2023-10-09 17:56:55
大自然探索 2023年9期


熱帶雨林中的一種藤蔓植植物能夠有效地引誘在黑暗中飛行的蝙蝠來為它們傳粉
比利時感官生態學家西蒙,正在用自己在蝙蝠導航方面的知識和經驗開發機器人的回聲導航技術。
時間回到2007年3月的一個雨夜。當時,還在讀研究生的西蒙獨自一人來到古巴的熱帶雨林中考察。他先前在雜志上看到當地一種藤蔓植物的碟狀葉子照片后,有了一個大膽的猜測:這種葉子應該有很強的聲音反射能力,而且正是憑借這種能力,這種植物能夠有效地引誘在黑暗中飛行的蝙蝠來為它們傳粉。
為了找到證據,他專程來到這里,在熱帶雨林中尋找這種植物。他帶著紅外攝像機和一堆零食,坐在那些互相纏繞的藤蔓植物中間,等待蝙蝠的到來。

蝙蝠真的“如約而至”,在短短一小時里就來了好幾撥,整個晚上它們都飛來飛去,幾乎沒有間斷過。
自那以后的幾年里,西蒙多次回到同一地點采集這種植物的葉子標本,帶回實驗室測試,了解聲音是如何從葉子上反射回來吸引住蝙蝠的。
西蒙的熱帶雨林之旅,讓他找到了一種可以用來開發聲吶導航潛力的新的解決方案。他的構想是,模仿熱帶雨林中的這種碟狀葉子以3D打印方式制作回聲反射器。通常,植物發出的回聲都是斷斷續續的,但這種藤蔓的碟狀葉子卻能持續反射回聲。回聲在黑暗中有著引導蝙蝠到藤蔓上授粉的強大吸引力,就像一座閃爍的燈塔為海上的航船指引著方向一樣。
2006年,西蒙和他的研究小組發現,碟狀葉子葉狀結構的變化可導致發出不同模式的回聲信號,而蝙蝠能夠辨別這些細微變化,從而找到正確的導向目標。5年后,西蒙的研究小組又發現,那種藤蔓植物的葉子在反射可清晰識別的回聲信號方面反射能力強。藤蔓的碟狀葉子可長距離反射帶有獨特信號的回聲,無論蝙蝠從哪個方向接近,信號都能保持一致。這種藤蔓植物的葉子就相當于十分強大的天然聲波信標,可將傳粉蝙蝠搜索目標的時間縮短一半,并可過濾掉周圍雜亂無章的其他回聲信息。受這種葉子結構原理的啟示,研究小組決定制作大小不同的反射器,看是否能利用同樣的原理來幫助機器人自主導航。
在最近的一項研究中,西蒙團隊用3D打印的塑料樹葉模仿這種天然藤蔓植物葉子,并且對葉子的形狀做了一些改進,以增強其反射回聲的強度。
在實驗中,他們使用多個反射器來引導機器人自主通過陌生的環境,同時還安裝了126片塑料樹葉,人為制造一些不和諧的回聲,這些模擬的雜亂回聲甚至超過了自主機器在真實的外界環境中導航時的情況。
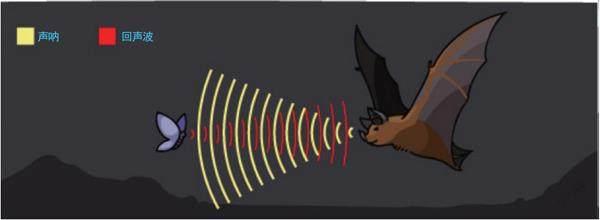
蝙蝠可以很容易地從大量回聲中提取有價值的導航信息
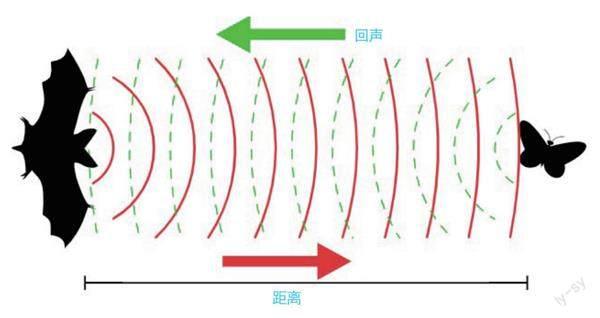
蝙蝠回聲定位示意圖
利用回聲導航,是讓自主機器人移動的一項先進技術。回聲中的很多雜音是如何過濾掉的?機器人技術能從蝙蝠導航的秘密中學到些什么呢?
通常,大多數自主移動機器人都需要通過一套復雜的傳感器來操縱。聲吶技術可通過回聲定位幫助它們避開障礙物:聲音脈沖從最近的物體上反彈回來,作為引導機器人前進的導航信息。這種導航技術相對便宜,在攝像裝置有可能失靈的低能見度環境中也很有用。但這項技術并非沒有瑕疵,因為機器人周圍的物體會反射一連串的干擾信號——回聲雜波,從而讓機器人難以對導航信息進行篩選。
蝙蝠可以很容易地從大量回聲中提取有價值的導航信息,并且在大腦中實時繪制包含最新信息的周圍環境地圖,而機器人很難模仿蝙蝠的這種本領。這使得西蒙等研究人員不得不尋找新的途徑來幫助機器人更好地對導航信息進行篩選。
幾種人工信標有助于引導自主機器人。例如,簡單的聲音反射器可用來引導裝有聲吶傳感器的水棲機器人。但很少有人研究如何制作陸地上的聲波信標。因此,制作幫助機器人在回聲雜波中導航的陸地信標,是研究人員面對的一個新課題。

植物的葉子就相當于十分強大的天然聲波信標
研究人員訓練機器人識別不同大小的葉子反射器,就像蝙蝠通過回聲辨別不同形狀的物體一樣。每種不同類型的反射器傳達某個特定的指令,指示機器人做出轉動、停止或打開指示燈等動作。
他們使用的這種機器人只有人類膝蓋高,用三個輪子在實驗室里自主移動。當機器人發出如蝙蝠般的叫聲時,反射器隨即傳出回聲,并像小燈塔一樣發出閃光。但是,從126片塑料葉片上反射的聲音卻雜亂無章,就像旋轉的迪斯科球上閃爍的燈光。不過,盡管有這些雜音的干擾,機器人還是能夠分辨出模仿藤蔓植物葉子設計的反光鏡發出的回聲,辨識重要的導航提示聲音。

研究人員訓練機器人

自主移動的機器人
西蒙認為,這項研究顯示,基礎生態學可以推動導航技術發展。這種反射器可以幫助機器人在狹小的空間(比如布滿灰塵的溫室或黑暗的礦井)里工作,在那樣的環境里機器人的視覺能力會受到嚴重影響。如今聲吶傳感器主要用于測距,但它們也可以用來做更多的工作。
這項研究的合作者、一名電氣工程師認為,他們制作的聲音反射器原理簡單,效果顯著,解決了回聲的雜波問題。反射器的回聲與背景干擾回聲有著鮮明的對比,就像一塊紅色的小石子在大批黑石頭中那樣,顯得格外醒目。
盡管取得了這些進展,但在這些研究成果的背后,還隱藏著一個關于聲吶導航在自然界中究竟是如何工作的問題。這是一個有待于人們進一步探索的、更深的謎團。
蝙蝠如何利用回聲定位來感知環境并在環境中移動,這是人們一直在爭論的一個有趣問題。蝙蝠是簡單地識別從特定物體上反射的回聲,還是在大腦中重構一個更詳細的3D圖景?一些研究人員認為,也許是兩者的結合。
無論如何,蝙蝠如何利用聲吶導航是回聲定位中一個很重要的問題。研究表明,能深度學習算法的機器人可以幫助我們了解蝙蝠是如何從聲波數據中提取信息的。畢竟,這些神經網絡模仿的是蝙蝠擁有、但機器人沒有的東西——大腦。
雖然這些神經網絡是一種強大的工具,但它們仍然比不上蝙蝠的大腦。例如,海豚聲吶已被研究了幾十年,但哺乳動物的自然能力仍然優于人造聲吶,尤其是在回聲雜亂的環境中。
有科學家曾開發了海豚式聲吶系統,并制作了水下聲吶信標。雖然這方面的研究取得了一些進展,但神經網絡仍然無法與海豚詮釋感官數據的方式抗衡。海豚有大腦,這是最關鍵的。
科學家仍在努力揭示自然界某些動物回聲定位的謎團。如果機器人能復制蝙蝠的行為,將會是一件令人振奮的事情。大自然才是最了不起的工程師。
研究人員開發的反射器是有效的,因為它們為解決回聲雜波問題提供了一個簡單的方案。如果這個問題得到圓滿解決,就可以在室外環境中借助人工聲吶完成很多工作。探索自然進化的解決方案很有意義,因為它們通常都非常簡單,但也最有效。
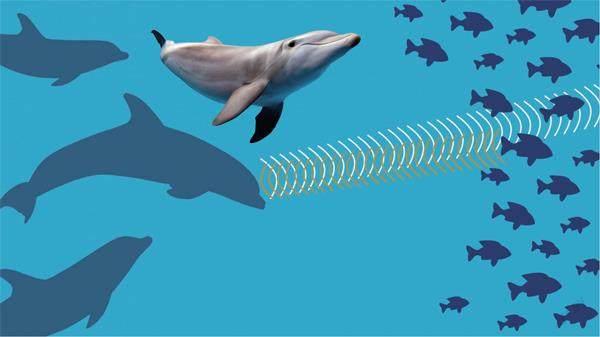
科學家曾開發了海豚式聲吶系統,并制作了水下聲吶信標
猜你喜歡
體育科技文獻通報(2022年3期)2022-05-23 13:46:54
天津外國語大學學報(2021年3期)2021-08-13 08:32:18
遼金歷史與考古(2021年0期)2021-07-29 01:06:54
科技傳播(2019年22期)2020-01-14 03:06:54
民用飛機設計與研究(2019年4期)2019-05-21 07:21:24
汽車工程學報(2017年2期)2017-07-05 08:13:02
少兒科學周刊·兒童版(2017年5期)2017-06-29 22:24:28
少兒科學周刊·兒童版(2017年5期)2017-06-29 16:46:33
紅領巾·萌芽(2017年5期)2017-06-23 10:35:59
爆笑show(2016年7期)2017-02-09 09:36:13