岸基GPS-R水面高反演測(cè)站時(shí)空布局優(yōu)化
2023-10-10 14:35:18桑文剛王昭然張興國(guó)靳奉祥
測(cè)繪通報(bào) 2023年9期
桑文剛,王昭然,張興國(guó),靳奉祥,3
(1.山東建筑大學(xué)測(cè)繪地理信息學(xué)院,山東 濟(jì)南 250101;2.濟(jì)南市勘察測(cè)繪研究院,山東 濟(jì)南 250013;3.山東科技大學(xué)測(cè)繪與空間信息學(xué)院,山東 青島 266590)
近年來(lái),隨著GNSS飛速發(fā)展、導(dǎo)航衛(wèi)星資源持續(xù)豐富及應(yīng)用廣度和深度的不斷提高,有學(xué)者提出發(fā)揮GPS全天候、全天時(shí)、高精度及低成本的特點(diǎn)[1],利用導(dǎo)航定位衛(wèi)星,以及水系表面、接收機(jī)構(gòu)建岸基GPS雙基雷達(dá),對(duì)提取的水面反射信號(hào)進(jìn)行處理。因此,水面高測(cè)定的GPS-R理論與方法逐漸受到國(guó)內(nèi)外研究者的關(guān)注。
自文獻(xiàn)[2]提出PARIS(passive reflectometry and in-terferometry system)的概念以來(lái),眾多學(xué)者對(duì)GPS-R水面測(cè)高進(jìn)行了大量研究。文獻(xiàn)[3]利用GPS信噪比(SNR)成功反演得到海平面高度變化數(shù)據(jù),證明了基于SNR的GPS-R反演水面高度的可行性。文獻(xiàn)[4]則利用單臺(tái)測(cè)量型 GPS接收機(jī)實(shí)現(xiàn)了GPS-R水面高度測(cè)量,并初步驗(yàn)證了其作為驗(yàn)潮儀的功能,這使得利用測(cè)量型GPS接收機(jī)作為岸基站點(diǎn)進(jìn)行GPS-R水面測(cè)高成為可能。而隨著算法與儀器用于岸基GPS-R水面測(cè)高的可行性被驗(yàn)證,該項(xiàng)技術(shù)被廣泛應(yīng)用于大壩、河流及湖泊等多種水域[5-7],并已取得眾多成果。為進(jìn)一步研究影響GPS-R反演精度的因素,文獻(xiàn)[8]利用第一菲涅爾反射區(qū)限定了測(cè)站的觀測(cè)范圍,避免接收來(lái)自地面的反射信號(hào);文獻(xiàn)[9—10]分別針對(duì)海面等非平靜水域及水庫(kù)等平靜水域,研究了衛(wèi)星高度角區(qū)間對(duì)反演結(jié)果的影響。目前,對(duì)GPS-R水面測(cè)高技術(shù)外部影響因素的研究不斷深入,眾多學(xué)者對(duì)數(shù)據(jù)處理流程進(jìn)行優(yōu)化以提高反演精度。文獻(xiàn)[11]反演了美國(guó)SC02測(cè)站長(zhǎng)達(dá)14年的海平面變化時(shí)間序列, 其結(jié)果與驗(yàn)潮站數(shù)據(jù)相比,兩者較差的RMS為8 cm,驗(yàn)證了基于GPS信噪比數(shù)據(jù)監(jiān)測(cè)海平面變化的可靠性;文獻(xiàn)[12]提出了一種自適應(yīng)測(cè)站高優(yōu)化方法,有效提高了GPS-R反演潮位的精度。
以上研究在分析GPS反射信號(hào)反演水面高原理與方法的基礎(chǔ)上,在不同類型水域進(jìn)行了多方位可行性驗(yàn)證。但基于SNR的GPS-R反演結(jié)果精度、可用性及可靠性,與觀測(cè)時(shí)段內(nèi)可見(jiàn)衛(wèi)星落入指定水域方位、入射角度,以及有效弧段長(zhǎng)度和數(shù)量密切相關(guān)。同時(shí)考慮現(xiàn)階段我國(guó)大中型水庫(kù)大壩、庫(kù)岸邊坡及海岸等周邊均布設(shè)有GNSS永久觀測(cè)站,為進(jìn)一步提高其數(shù)據(jù)利用率,可將其作為固定岸基GPS-R水面測(cè)高觀測(cè)點(diǎn)位進(jìn)行時(shí)空屬性分析,結(jié)合測(cè)區(qū)情況制定布設(shè)策略,推斷最佳觀測(cè)時(shí)段,有效提高岸基GPS-R水面測(cè)高的觀測(cè)效率,對(duì)岸基GPS-R反演水面高度具有重要意義。本文基于SNR的GPS-R反演水面高度原理,在分析觀測(cè)點(diǎn)位時(shí)空特性的基礎(chǔ)上,結(jié)合菲涅爾反射區(qū)及衛(wèi)星高度角區(qū)間對(duì)GPS-R觀測(cè)點(diǎn)位進(jìn)行定量分析,以此制定GPS-R觀測(cè)點(diǎn)位時(shí)空布局優(yōu)化策略;并通過(guò)對(duì)臨時(shí)測(cè)站與長(zhǎng)期測(cè)站的仿真及實(shí)際觀測(cè)驗(yàn)證該策略的可行性。
1 基于反演事件時(shí)空優(yōu)化策略
1.1 GPS-R水面測(cè)高原理
如圖1所示,岸基測(cè)站接收到由衛(wèi)星直射和經(jīng)水面反射在天線相位中心疊加而形成的復(fù)合信號(hào)[13-14]。復(fù)合信號(hào)會(huì)隨著GPS衛(wèi)星升降、水面高度或粗糙度變化而產(chǎn)生波動(dòng),導(dǎo)致接收的信噪比等觀測(cè)量在振幅和頻率上發(fā)生改變。為了有效提取水面高等水系屬性,反演算法通常采用信噪比數(shù)據(jù),基于多項(xiàng)式擬合或小波分析等去除趨勢(shì)項(xiàng)方法,過(guò)濾觀測(cè)時(shí)段復(fù)合信號(hào)中的直射成分后,獲取包含反射面屬性信息的信噪比殘差序列為

圖1 岸基GNSS-R水面反演
(1)
δ(SNR)=Acos(2πfx+φ)
(2)
由于信噪比殘差序列相對(duì)于自變量sinθ是非等間隔采樣,需利用Lomb-Scargle算法提取其主頻f,求得天線相位中心至水面的垂直高度h為
(3)
為有效利用以上原理進(jìn)行水面高度反演,首先應(yīng)合理選擇測(cè)站位置,以保障最大限度獲取落入指定水域內(nèi)的衛(wèi)星弧段數(shù)量及長(zhǎng)度,并根據(jù)水面設(shè)定衛(wèi)星高度角范圍劃分上升及下降弧段。此外,還應(yīng)兼顧接收機(jī)端收到的衛(wèi)星直達(dá)與水面反射疊加而成的信號(hào),強(qiáng)度會(huì)隨衛(wèi)星反射點(diǎn)在水面的軌跡變化而增減,定義潛在可用于水面高度反演的事件,并利用其進(jìn)行最佳測(cè)站位置及觀測(cè)時(shí)段的優(yōu)化選擇。
1.2 反演事件
如圖2所示,在由GPS衛(wèi)星T、水面S及接收機(jī)R構(gòu)成的雙基雷達(dá)中,水面反射點(diǎn)的位置會(huì)隨衛(wèi)星升降及其軌道運(yùn)行而變化,在水面形成反射點(diǎn)軌跡。根據(jù)惠更斯-菲涅爾定理[15],以衛(wèi)星信號(hào)發(fā)射端T與接收機(jī)鏡像點(diǎn)R′為焦點(diǎn)形成的橢球體,在水面S相交形成多個(gè)以反射點(diǎn)為中心的橢圓區(qū)域F。其中,反射信號(hào)主要來(lái)源于最中心的橢圓區(qū)域,被稱為第一菲涅爾反射區(qū)[16]。
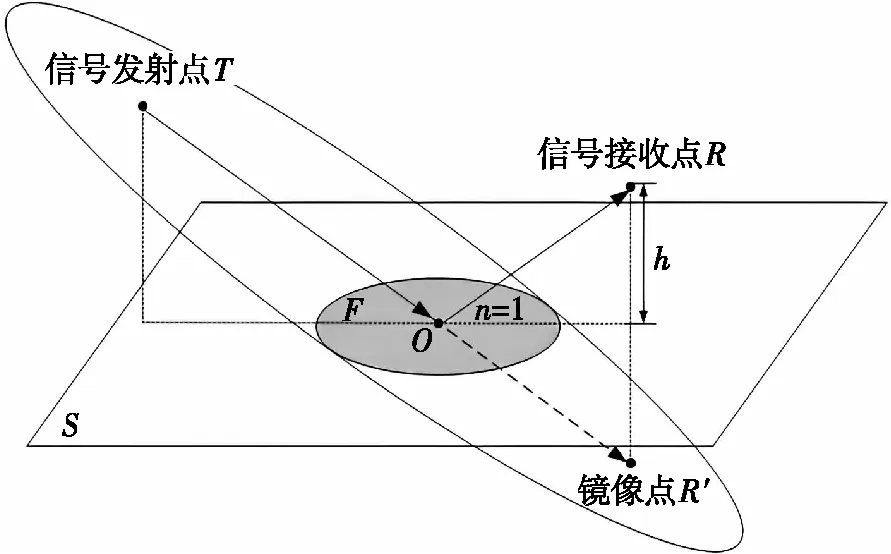
圖2 菲涅爾反射區(qū)
由于第一菲涅爾區(qū)中的反射信號(hào)能量更強(qiáng),因此可根據(jù)接收機(jī)相對(duì)于水面方位角范圍,確定測(cè)站的有效反射區(qū)α反射,公式為
α反射={α|αFresnel∩α水面}
(4)
確定測(cè)站有效反射區(qū)后,根據(jù)相關(guān)研究成果[5,9-10],對(duì)水庫(kù)等相對(duì)平靜水面可選取高度角5°~25°,對(duì)海面等非平靜水面選取高度角5°~12°進(jìn)行觀測(cè)時(shí)段有效弧段(ARCi)提取,公式為
ARCi=(α反射,β)i
(5)
式中,β為高度角區(qū)間;i為某一衛(wèi)星。
綜上所述,在圖1的衛(wèi)星、反射水面及接收機(jī)之間所形成的有效反射區(qū)范圍內(nèi),將滿足反演所需高度角區(qū)間的上升或下降弧段定義為一次反演事件,可表示為
(6)

1.3 測(cè)站時(shí)空布局優(yōu)化策略
考慮到導(dǎo)航衛(wèi)星星座結(jié)構(gòu)設(shè)計(jì),尤其是軌道傾角及數(shù)量的影響,在同一測(cè)區(qū)內(nèi),測(cè)站獲得的低高度角衛(wèi)星弧段數(shù)量會(huì)隨其觀測(cè)方位及觀測(cè)時(shí)間的不同而變化。針對(duì)這一特性,本文提出一種基于反演事件的岸基GPS-R觀測(cè)點(diǎn)位時(shí)空布局優(yōu)化策略,步驟如下:
(1)根據(jù)測(cè)區(qū)條件,選擇若干備選測(cè)站,繪制第一菲涅爾反射區(qū),并通過(guò)與測(cè)站周圍環(huán)境相結(jié)合,設(shè)置觀測(cè)方位,確保區(qū)間內(nèi)反射信號(hào)全部來(lái)自水面。
(2)根據(jù)測(cè)區(qū)水面情況,選擇適宜的高度角區(qū)間并根據(jù)觀測(cè)需求劃分時(shí)段,統(tǒng)計(jì)備選測(cè)站及其各時(shí)段內(nèi)的反演事件數(shù)量。
(3)對(duì)比各備選測(cè)站及其不同時(shí)段內(nèi)的反演事件統(tǒng)計(jì)數(shù)據(jù),以事件數(shù)量為首要依據(jù)確定最佳設(shè)站位置與觀測(cè)時(shí)段。
2 仿真分析
為驗(yàn)證基于反演事件的GPS-R測(cè)站時(shí)空布局優(yōu)化策略的可行性,以圖1為例,模擬位于北半球的平靜水面并設(shè)定位于水系東、南、西、北處的4個(gè)仿真測(cè)站進(jìn)行仿真試驗(yàn),其測(cè)站高度均為2 m。
首先按照表1的參數(shù),在圖3中以不同灰度按照5°高度角為間隔,繪制各測(cè)站所有可見(jiàn)星下呈狹長(zhǎng)橢圓狀分布的第一菲涅爾區(qū)。可知,隨著衛(wèi)星高度角降低,第一菲涅爾區(qū)的覆蓋范圍逐漸增加,根據(jù)空間菲涅爾區(qū)模型,還可通過(guò)適當(dāng)增加測(cè)站至反射面的垂直距離進(jìn)一步擴(kuò)大反射區(qū)范圍[17]。此外,由于GPS衛(wèi)星軌道傾角及軌道高度等星座結(jié)構(gòu)因素,導(dǎo)致E、W測(cè)站第一菲涅爾區(qū)呈對(duì)稱分布,而S測(cè)站相較于N測(cè)站存在一處約為60°的扇形空白區(qū),造成其第一菲涅爾區(qū)域面積明顯少于N測(cè)站。
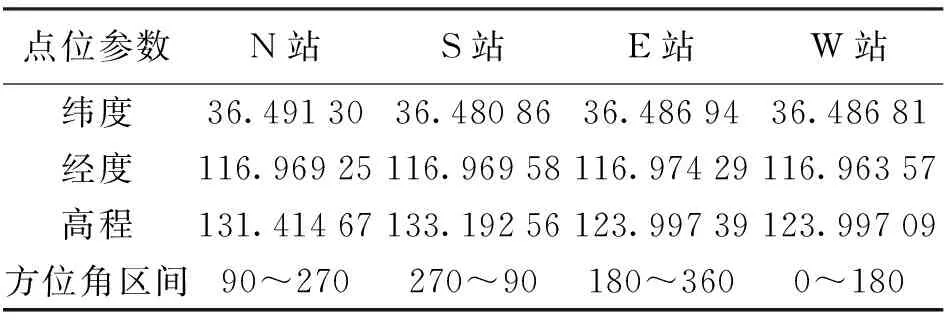
表1 反演事件仿真點(diǎn)位主要指標(biāo)參數(shù) (°)
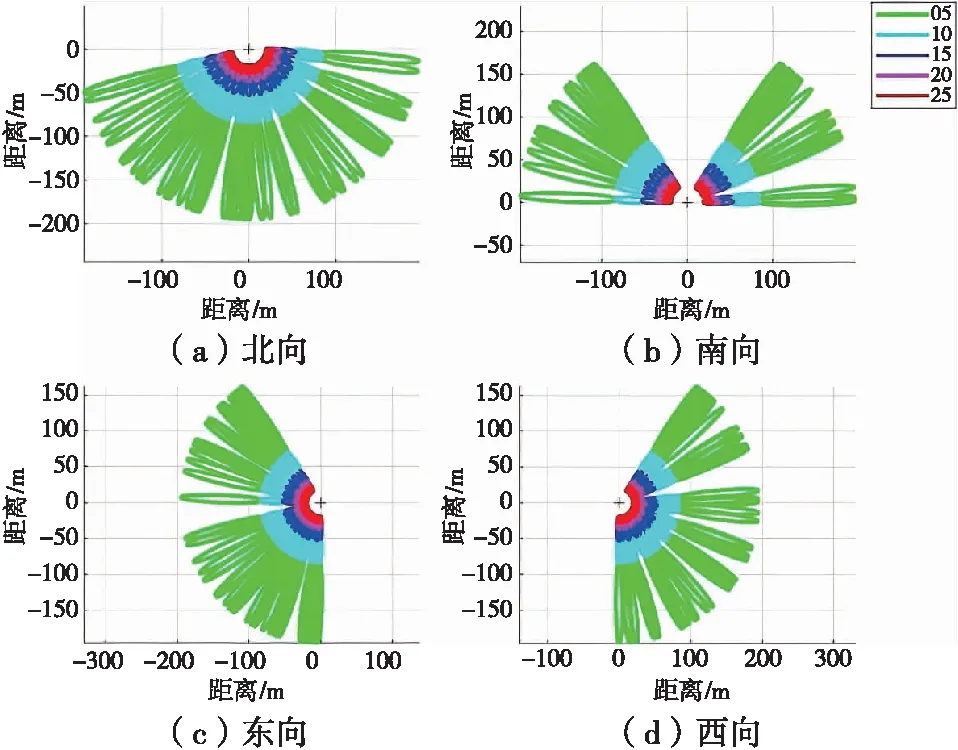
圖3 各仿真點(diǎn)位第一菲涅爾反射區(qū)分布
在各仿真測(cè)站第一菲涅爾區(qū)確定的有效反射區(qū)內(nèi),根據(jù)式(6),以5°~25°高度角區(qū)間,按照每4 h統(tǒng)計(jì)一次的方法,統(tǒng)計(jì)1 d內(nèi)各仿真測(cè)站反演事件(見(jiàn)表2),并同步繪制半圓周輻射面反演事件分布(如圖4所示)。在半圓周輻射區(qū)域中,反演事件均以環(huán)狀分布,如圖4中紅色表示部分。其中,E、W測(cè)站與圖3中第一菲涅爾區(qū)分布一致,反演事件呈對(duì)稱分布,N測(cè)站所觀測(cè)到的反演事件是連續(xù)且均勻的,而S測(cè)站同樣受GPS星座結(jié)構(gòu)影響,被空洞分割成對(duì)稱分布。由表2統(tǒng)計(jì)數(shù)據(jù)可以明顯看出,N測(cè)站受北方空洞影響,導(dǎo)致其反演事件覆蓋范圍大于其他測(cè)站,反演事件總計(jì)達(dá)到55個(gè)。而E、W測(cè)站反演事件總數(shù)相同,但各時(shí)段反演事件數(shù)量略有差異,因此在非長(zhǎng)期觀測(cè)時(shí),選取最優(yōu)觀測(cè)時(shí)段是必要的。表2展示了各時(shí)段反演事件分布,其中0:00—4:00 h及20:00—24:00 h時(shí)段的反演事件數(shù)量相對(duì)較多,其余時(shí)段內(nèi)的反演事件數(shù)量大致相同。

表2 各仿真點(diǎn)位及其不同時(shí)段反演事件數(shù)量 個(gè)

圖4 仿真點(diǎn)位反演事件分布
考慮地面用戶觀測(cè)到的GPS衛(wèi)星運(yùn)行周期約為23 h56 min,因此在水系不同方位反演事件時(shí)空分布呈現(xiàn)一定的規(guī)律性,圖5(a)為4個(gè)測(cè)站1個(gè)月仿真結(jié)果,各測(cè)站天反演事件總數(shù)基本維持不變,且“北多南少,東西一致”的規(guī)律更清晰。但由于GPS衛(wèi)星運(yùn)行的周期規(guī)律,反演事件都會(huì)較前一天提前4 min出現(xiàn),由于本次仿真1個(gè)月數(shù)據(jù),通過(guò)繪制N測(cè)站反演事件徑向堆積圖,可看到圖5(b)中經(jīng)過(guò)30 d累積后,反演事件會(huì)提前2 h出現(xiàn)。
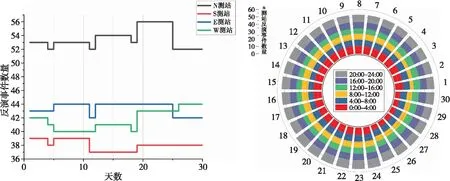
圖5 1個(gè)月各仿真測(cè)站反演事件時(shí)空分布統(tǒng)計(jì)
3 反演事件有效率試驗(yàn)驗(yàn)證
根據(jù)本文對(duì)反演事件的定義可知,反演事件僅是統(tǒng)計(jì)的潛在可用于計(jì)算水面高的有效弧段數(shù)據(jù),在實(shí)際應(yīng)用中,由于反演事件對(duì)應(yīng)信噪比數(shù)據(jù)會(huì)受到諸如地面反射干擾或物體遮擋等多種外界因素影響,導(dǎo)致反演事件中僅部分能夠得到有效結(jié)果,因此需進(jìn)一步驗(yàn)證反演事件的有效率。在上述仿真試驗(yàn)基礎(chǔ)上,選擇濟(jì)南臥虎山水庫(kù)進(jìn)行驗(yàn)證。因該水庫(kù)由壩體向東縱深,最終選擇3個(gè)測(cè)站架設(shè)接收機(jī)進(jìn)行試驗(yàn),如圖6所示,設(shè)置1 s采樣率,采樣時(shí)間為UTC時(shí)間2021年10月12日8:00—12:00。其中,測(cè)站1與測(cè)站3分別位于水庫(kù)西側(cè)與北側(cè),而位于東南方的測(cè)站2視野開(kāi)闊,能夠兼顧南站及東站的觀測(cè)方向,使得實(shí)測(cè)觀測(cè)方位與仿真測(cè)站保持一致。采樣時(shí)段庫(kù)區(qū)水面較為平靜,因此衛(wèi)星高度角區(qū)間均設(shè)定為5°~25°。結(jié)合各測(cè)站有效反射區(qū),表3為其相對(duì)應(yīng)的方位角觀測(cè)區(qū)間。
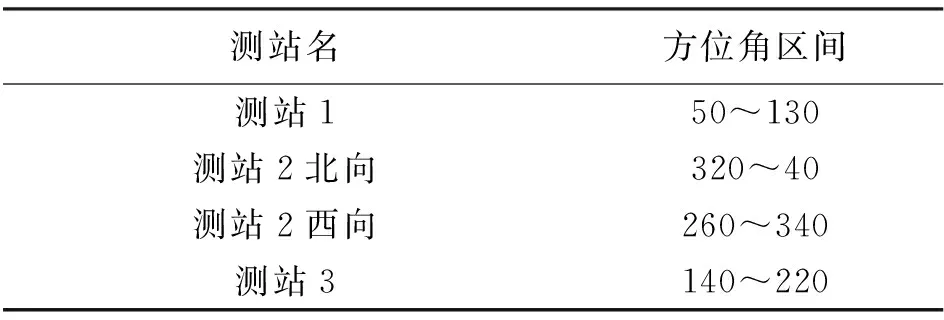
表3 實(shí)測(cè)點(diǎn)位觀測(cè)信息 (°)
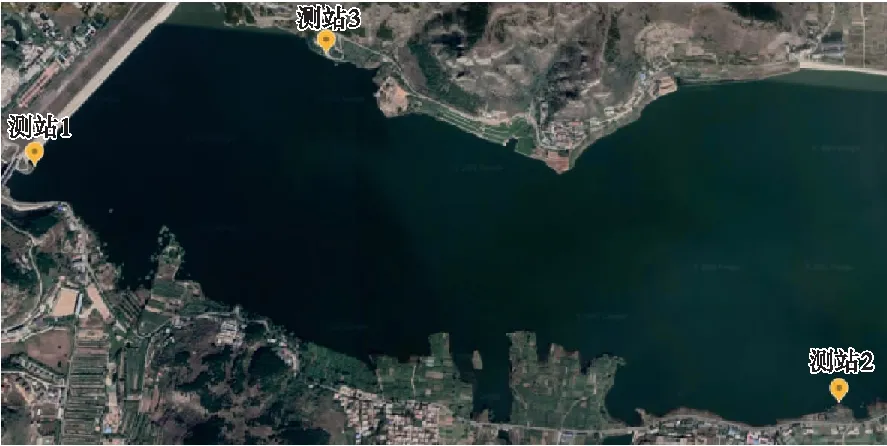
圖6 試驗(yàn)測(cè)站分布
首先,繪制采樣時(shí)段3測(cè)站反演事件分布,如圖7所示。紅色線段表示反演事件,測(cè)站2西向與測(cè)站3獲得的反演事件數(shù)量均為6個(gè),測(cè)站1與測(cè)站2北向分別為4個(gè)和3個(gè),其數(shù)量分布規(guī)律與仿真結(jié)果相同。

圖7 采樣時(shí)段3測(cè)站反演事件分布
同時(shí),利用反演事件對(duì)應(yīng)數(shù)據(jù)去除趨勢(shì)項(xiàng)及頻譜分析等處理后得到反演結(jié)果,但由于實(shí)際觀測(cè)時(shí),測(cè)站周圍存在水面以外的反射面及遮擋,導(dǎo)致實(shí)測(cè)反演結(jié)果僅部分有效,為進(jìn)一步判斷GPS-R最優(yōu)觀測(cè)點(diǎn)位,本文在反演事件數(shù)量對(duì)比的基礎(chǔ)上,對(duì)反演事件有效率進(jìn)行分析。圖8展示了各實(shí)測(cè)點(diǎn)位反演事件的有效率,以及其對(duì)應(yīng)方位的仿真點(diǎn)位反演事件數(shù)量的對(duì)比。可以發(fā)現(xiàn),在反演事件數(shù)量相同的南向與西向測(cè)站中,南向測(cè)站的數(shù)據(jù)有效率遠(yuǎn)大于西向測(cè)站,達(dá)83.3%。
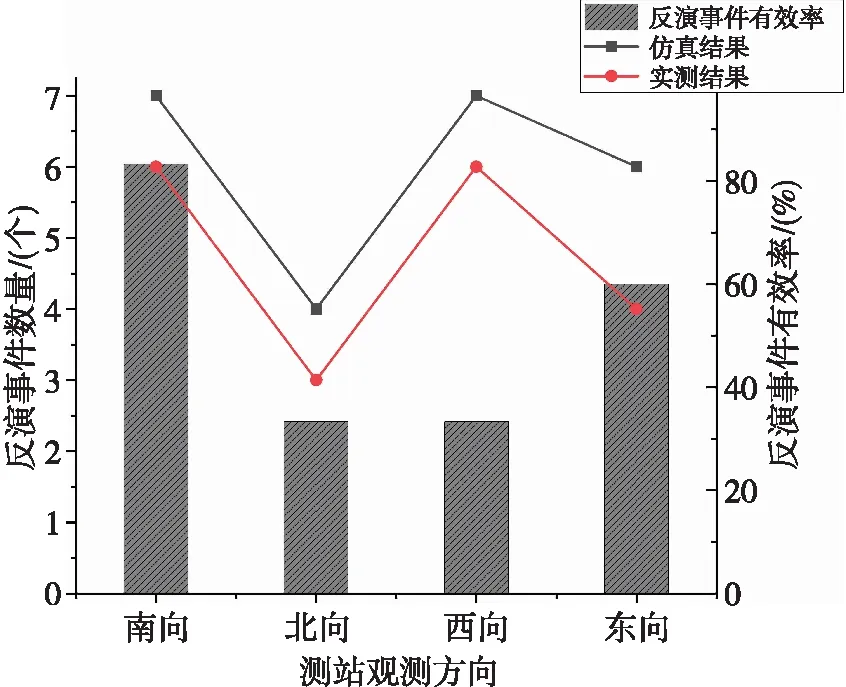
圖8 8:00—12:00時(shí)段仿真結(jié)果與實(shí)測(cè)結(jié)果對(duì)比
綜上分析,基于反演事件的GPS-R測(cè)站時(shí)空布局優(yōu)化策略在仿真測(cè)試與實(shí)測(cè)驗(yàn)證中,表現(xiàn)出良好的一致性與可靠性。其中,測(cè)區(qū)北處反演事件數(shù)量更多。同時(shí),實(shí)測(cè)結(jié)果表明,測(cè)區(qū)北處反演事件有效率也高于其他測(cè)站,從而進(jìn)一步驗(yàn)證了通過(guò)優(yōu)化測(cè)站位置及時(shí)段選擇,在確保反演事件數(shù)量的前提下,能夠有效提高反演結(jié)果的有效率。
4 結(jié) 語(yǔ)
本文在岸基GPS-R反演水面高度應(yīng)用中,基于反演高度算法核心,綜合菲涅爾反射區(qū)及衛(wèi)星入射角度,提出了反演事件這一概念,用于量化分析GPS-R觀測(cè)點(diǎn)位,并以此制定了測(cè)站時(shí)空布局優(yōu)化策略。通過(guò)仿真分析發(fā)現(xiàn),北半球測(cè)站在一天中反演事件空間分布呈現(xiàn)“北多南少,東西一致”的規(guī)律,北部測(cè)站較南部測(cè)站反演事件高于34%,因此,用戶在設(shè)站時(shí)應(yīng)優(yōu)先選擇水系北端,東西次之,并盡量避開(kāi)南部。由于受GPS衛(wèi)星運(yùn)行周期的影響,測(cè)站的反演事件也呈現(xiàn)周期性,可通過(guò)預(yù)報(bào)反演事件獲取測(cè)站最佳觀測(cè)時(shí)段,并根據(jù)其周期進(jìn)行動(dòng)態(tài)調(diào)整,從而全面優(yōu)化GPS-R測(cè)站最優(yōu)時(shí)空范圍,且通過(guò)某水庫(kù)岸基實(shí)測(cè)數(shù)據(jù)進(jìn)行反演事件有效率驗(yàn)證分析。結(jié)果表明,反演事件最多的測(cè)站有效率同樣高于其余測(cè)站,從而驗(yàn)證了開(kāi)展GPS-R觀測(cè)點(diǎn)位時(shí)空布局優(yōu)化研究,能夠有效提高觀測(cè)效率并優(yōu)化GPS-R技術(shù)反演水面高度的應(yīng)用作業(yè)流程,從而進(jìn)一步推動(dòng)該項(xiàng)技術(shù)由理論研究向?qū)嶋H應(yīng)用轉(zhuǎn)變。