基于改進(jìn)天鷹優(yōu)化器的抱桿結(jié)構(gòu)優(yōu)化
2023-10-12 09:47:00方林蔣曉琳周慶豐周煥林
科學(xué)技術(shù)與工程 2023年27期
關(guān)鍵詞:優(yōu)化結(jié)構(gòu)
方林,蔣曉琳,周慶豐,周煥林
(合肥工業(yè)大學(xué)土木與水利工程學(xué)院,合肥 230009)
抱桿是輸電鐵塔組立的重要起重工具,鐵塔輸送電壓的提升要求輸電鐵塔的高度和重量增加,從而導(dǎo)致抱桿的高度及鋼材尺寸隨之增加。在滿足工程使用的前提下,對(duì)抱桿進(jìn)行優(yōu)化設(shè)計(jì)顯得尤為重要,不僅減少了運(yùn)輸過程的碳排放,也減少了在此方面的經(jīng)濟(jì)支出。
元啟發(fā)式算法因其原理簡單、方便,被廣泛應(yīng)用于測(cè)控技術(shù)、車輛工程、燃油轉(zhuǎn)輸、電力建設(shè)、航空航天等領(lǐng)域。于燕南等[1]使用鏡面反射算法優(yōu)化橋式起重機(jī)的金屬結(jié)構(gòu),在滿足規(guī)范要求的同時(shí)減輕了結(jié)構(gòu)的重量。周潼等[2]對(duì)遺傳算法進(jìn)行改進(jìn),并應(yīng)用于羅氏線圈結(jié)構(gòu)的設(shè)計(jì),構(gòu)建了羅氏線圈優(yōu)化系統(tǒng)。孟建軍等[3]使用模擬退火遺傳(simulated annealing-genetic algorithm,SA-GA)混合算法對(duì)車輛輪重分配問題進(jìn)行優(yōu)化設(shè)計(jì),并將數(shù)值計(jì)算結(jié)果與仿真結(jié)果對(duì)比,驗(yàn)證其理論計(jì)算結(jié)果的準(zhǔn)確性。Wang等[4]通過響應(yīng)面法建立賽車尾翼的近似模型,針對(duì)此模型使用遺傳算法優(yōu)化賽車尾翼的升力阻力比。龔昊[5]對(duì)差分進(jìn)化算法進(jìn)行改進(jìn),并對(duì)燃油轉(zhuǎn)輸參數(shù)進(jìn)行優(yōu)化設(shè)計(jì),得到燃油轉(zhuǎn)輸參數(shù)最優(yōu)方案。陶然等[6]采用響應(yīng)面法模擬抱桿的真實(shí)響應(yīng),使用改進(jìn)的算術(shù)優(yōu)化算法對(duì)抱桿的響應(yīng)面代理模型進(jìn)行優(yōu)化設(shè)計(jì),降低了計(jì)算成本。Khodzhaiev等[7]提出二階突變方法處理變長基因組來對(duì)遺傳算法進(jìn)行改進(jìn),并使用改進(jìn)的遺傳算法對(duì)輸電塔進(jìn)行拓?fù)洹⑿螤詈统叽鐑?yōu)化。駱烜赫等[8]使用粒子群算法對(duì)功能梯度多級(jí)加筋圓柱殼進(jìn)行輕量化設(shè)計(jì),并進(jìn)行有限元特征值屈曲分析驗(yàn)證此優(yōu)化結(jié)果。
天鷹優(yōu)化器(aquila optimizer,AO)[9]作為當(dāng)前較新的元啟發(fā)式優(yōu)化算法,因其較好的計(jì)算能力被應(yīng)用于科學(xué)研究的多個(gè)方面。Abd Elaziz等[10]將AO和深度學(xué)習(xí)相結(jié)合,用于提升2019年冠狀病毒病的圖像分類; Ma等[11]結(jié)合準(zhǔn)對(duì)位學(xué)習(xí)策略和小波突變策略對(duì)AO進(jìn)行改進(jìn),進(jìn)行中國農(nóng)村人口預(yù)測(cè); Kharrich等[12]將AO結(jié)合算術(shù)優(yōu)化算法,用于設(shè)計(jì)儲(chǔ)能系統(tǒng)的微電網(wǎng)。上述研究表明了AO計(jì)算能力的有效性,但該算法局部搜索能力不足,易停滯于局部最優(yōu),并且在空間桁架結(jié)構(gòu)優(yōu)化方面的研究還有待拓展。
現(xiàn)針對(duì)AO較弱的局部搜索能力,使用改進(jìn)型Logistics混沌映射初始化算法的種群,有效幫助算法脫離局部最優(yōu)[13];引入新的平衡搜索方式,全局搜索和局部搜索得到了更好的平衡,算法迭代后期仍具有廣泛的搜索能力,提升算法擺脫局部最優(yōu)的能力;新的非線性參數(shù)增強(qiáng)算法的局部搜索能力;加入改進(jìn)型反向?qū)W習(xí)策略,增加種群多樣性,防止算法陷入局部最優(yōu)[14]。然后將改進(jìn)的天鷹優(yōu)化器(improved aquila optimizer,IAO) 結(jié)合罰函數(shù)法和有限元方法對(duì)十桿平面桁架結(jié)構(gòu)和抱桿結(jié)構(gòu)進(jìn)行優(yōu)化設(shè)計(jì)。
1 抱桿結(jié)構(gòu)有限元分析
1.1 抱桿簡介
以白鶴灘-江蘇±800千伏特高壓直流輸電工程中使用的750截面落地雙搖臂抱桿建立有限元模型,如圖1所示,抱桿結(jié)構(gòu)主要包括主桿段(普通段和加強(qiáng)段)、搖臂段和桅桿段。回轉(zhuǎn)支座,腰環(huán)拉線、調(diào)幅繩、內(nèi)拉線等均為次要結(jié)構(gòu)。
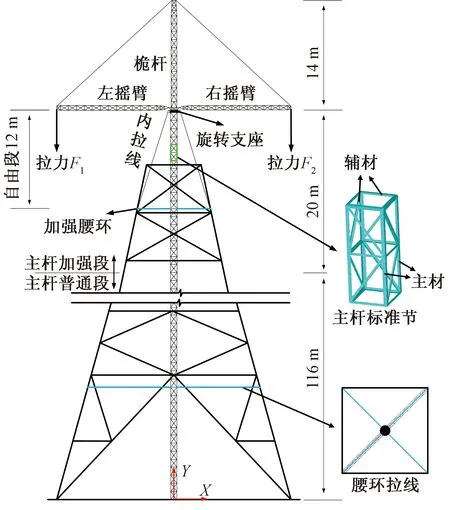
圖1 抱桿整體示意圖
該抱桿全高150 m,主要由抱桿主桿普通段(116 m),主桿加強(qiáng)段(20 m),搖臂(14 m)和桅桿(14 m)4個(gè)部分組成。抱桿主桿段和桅桿段截面為750 mm×750 mm,搖臂段截面為500 mm×600 mm,搖臂和桅桿頂部均采用變截面設(shè)計(jì)。抱桿回轉(zhuǎn)支座處設(shè)置內(nèi)拉線,與抱桿鉛垂線的夾角為20°。抱桿自由段高12 m,抱桿與鐵塔間設(shè)置9道腰環(huán),其中第一道為加強(qiáng)腰環(huán),距離第二道普通腰環(huán)為12 m,其余腰環(huán)間距小于等于15 m。
抱桿最初設(shè)計(jì)的構(gòu)件尺寸如表1所示,主材采用Q345鋼,輔材采用Q235鋼。密度ρ=7.85×103kg/m3,彈性模量E=2.06×1011Pa,泊松比υ=0.3。

表1 抱桿各段角鋼型號(hào)
1.2 抱桿有限元模型
為了方便建模,做以下約定。搖臂方位:搖臂俯視圖與X軸正向所成的角度;風(fēng)向:X軸負(fù)方向的風(fēng)向?yàn)?°,垂直X軸的風(fēng)向?yàn)?0°,二者角平分線為45°方向。如圖2所示。
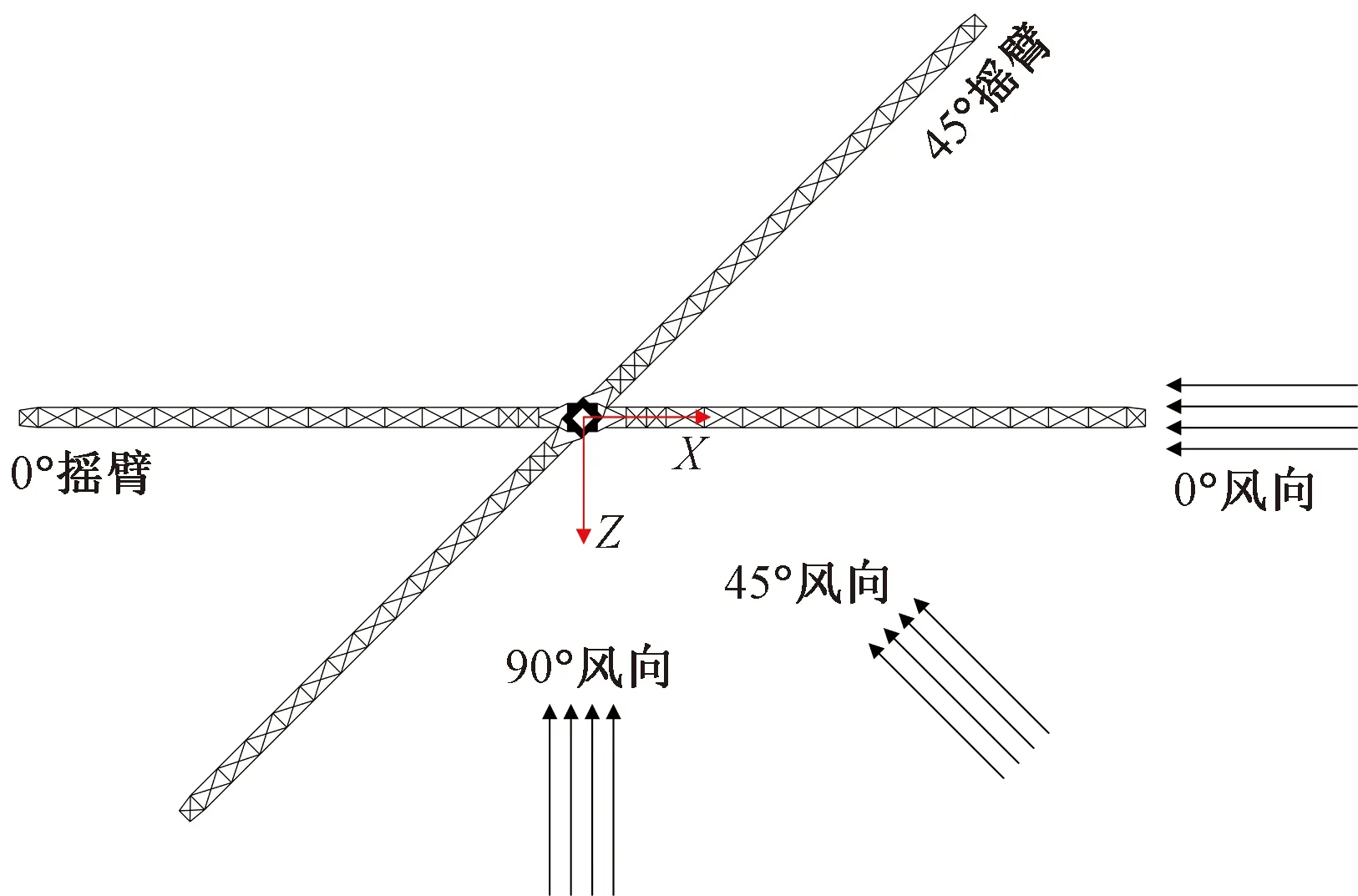
圖2 搖臂方位和風(fēng)載荷方向
在抱桿三維有限元分析模型中采用梁單元模擬抱桿的主桿、桅桿和搖臂;用索桿單元模擬僅受拉力的內(nèi)拉線和腰環(huán)等。釋放搖臂繞Z軸轉(zhuǎn)動(dòng)的自由度。
1.3 荷載工況
抱桿承受的主要載荷包括自重、風(fēng)載荷以及吊重。抱桿一側(cè)吊重為4 t,另一側(cè)為3 t,45°搖臂,45°風(fēng)向時(shí)為此工程中的最危險(xiǎn)工況。吊鉤重250 kg,起吊鋼絲繩重500 kg;最大工作風(fēng)速13.8 m/s(6級(jí)風(fēng))。
根據(jù)《起重機(jī)設(shè)計(jì)規(guī)范》(GB 3811—2008)風(fēng)載荷的計(jì)算公式為
Pw=CPA
(1)
C=1.7(1+η)
(2)
(3)
式中:C為風(fēng)力系數(shù);A為迎風(fēng)面積;P為風(fēng)壓;η為擋風(fēng)折減系數(shù),由充實(shí)率φ確定;Vs為計(jì)算風(fēng)速。
1.4 有限元分析
采用有限元方法對(duì)落地雙搖臂抱桿最危險(xiǎn)工況進(jìn)行分析計(jì)算,分析結(jié)果如表2所示。由表2可知,在最危險(xiǎn)工況下,主材的最大Mises應(yīng)力為158.80 MPa,輔材的最大Mises應(yīng)力為115.60 MPa,兩者均滿足《架空輸電線路施工機(jī)具基本技術(shù)要求》(DL/T 319—2018)中2倍屈服安全系數(shù)的要求;抱桿頂端最大水平位移為342.98 mm,抱桿屈曲系數(shù)為4.37,兩者均滿足設(shè)計(jì)要求。本文中將其作為優(yōu)化工況對(duì)抱桿結(jié)構(gòu)進(jìn)行優(yōu)化。

表2 最危險(xiǎn)工況分析結(jié)果
2 改進(jìn)的天鷹優(yōu)化器
2.1 天鷹優(yōu)化器
AO是Abualigah等[9]在2021年提出的一種元啟發(fā)式算法,該算法模擬天鷹這種生物的四種捕獵行為產(chǎn)生4個(gè)迭代公式,若當(dāng)前迭代次數(shù)小于最大迭代次數(shù)的2/3,使用前兩個(gè)迭代公式進(jìn)行全局搜索,否則采用后兩個(gè)迭代公式進(jìn)行局部搜索。
2.1.1 第一種捕獵行為X1(擴(kuò)大探索)
天鷹在高空中廣泛地探索,并通過垂直彎腰的高空飛翔識(shí)別獵物所在區(qū)域,來選擇出最佳狩獵區(qū)域。該行為表示為
X1(t+1)=Xbest(t)L+[XM(t)-Xbest(t)]rand
(4)
(5)
式(4)中:t為當(dāng)前迭代;T為最大迭代次數(shù);Xbest(t)為第t次迭代之前獲得的最佳解,即當(dāng)前的最佳獵物位置;rand為0~1的隨機(jī)值;L為隨迭代次數(shù)的線性遞減值。XM(t)表示第t次迭代當(dāng)前解的平均值,計(jì)算公式為
(6)
式中:D表示問題的維度;N表示候選解的個(gè)數(shù)(種群大小)。
2.2.2 第二種捕獵行為X2(縮小探索)
當(dāng)天鷹在高空中發(fā)現(xiàn)獵物區(qū)域,會(huì)在獵物上方區(qū)域盤旋,準(zhǔn)備著陸和發(fā)動(dòng)攻擊。在該行為中天鷹會(huì)仔細(xì)地探索目標(biāo)所在區(qū)域,從而為攻擊做準(zhǔn)備。該行為表示為
X2(t+1)=Xbest(t)Levy(D)+XR(t)+
(y-x)rand
(7)
(8)
(9)
(10)
式中:XR(t)表示第t次迭代時(shí)在種群[1,N]范圍內(nèi)的一個(gè)隨機(jī)解;Levy(D)為Levy飛行分布函數(shù);y和x為搜索過程中的螺旋形狀參數(shù);D表示問題維度;s=0.01;μ和υ為0~1的隨機(jī)數(shù);β=1.5;r1為1~20的固定的搜索周期數(shù);U=0.005 65;D1為從1~D的整數(shù);ω為0.005;θ1=1.5π。
2.1.3 第三種捕獵行為X3(擴(kuò)大開發(fā))
當(dāng)天鷹確定獵物所在區(qū)域,準(zhǔn)備著陸和攻擊時(shí),會(huì)垂直下降進(jìn)行初步攻擊,以發(fā)現(xiàn)獵物的反應(yīng)。在這里,天鷹將利用選定的目標(biāo)區(qū)域來接近獵物并攻擊。該行為表示為
X3(t+1)=[Xbest(t)-XM(t)]α-rand+
[(BU-BL)rand+BL)δ
(11)
式(11)中:α和δ為一個(gè)確定的較小的開采調(diào)整值,值為0.1;BL為問題的下界值;BU為問題的上界值。
2.1.4 第四種捕獵行為X4(縮小開發(fā))
當(dāng)天鷹接近獵物時(shí),會(huì)根據(jù)獵物的隨機(jī)運(yùn)動(dòng)在陸地上攻擊獵物。該行為表示為
X4(t+1)=QFXbest(t)-[G1X(t)rand]-
G2Levy(D)+randG1
(12)
(13)
式中:QF為平衡搜索策略的質(zhì)量函數(shù);G1為天鷹的各種運(yùn)動(dòng),用于跟蹤奔跑期間的獵物;G2為2~0的線性遞減值。
2.2 改進(jìn)的天鷹優(yōu)化器(IAO)
2.2.1 混沌映射
AO的首代種群是以隨機(jī)化方式生成。混沌映射與隨機(jī)化相比,其產(chǎn)生的首代種群在搜索空間內(nèi)分布更加均勻,幫助算法規(guī)避局部最優(yōu)和算法早熟現(xiàn)象。毛清華等[13]提出的改進(jìn)型Logistics混沌映射(improved logistic mapping,ILM)相比于經(jīng)典Logistics混沌映射在初始化種群分布方面性能更佳,所以本文中使用改進(jìn)型Logistics混沌映射初始化天鷹種群。計(jì)算公式為
(14)
Xij=yn(BU,j-BL,j)+BL,j
(15)
式(15)中:BU,j和BL,j分別為第j維搜索空間中的上界和下界,i∈[1,N],j∈[1,D],N和D分別為算法種群數(shù)和維度。
將得到的混沌序列[yn]代入式(15)得到天鷹種群的初始位置。
2.2.2 新的平衡搜索策略
在AO中,若當(dāng)前迭代次數(shù)t≤2T/3時(shí),算法進(jìn)入全局搜索階段,反之進(jìn)入局部搜索階段,為了更好地平衡兩者,擺脫局部最優(yōu)值,本文提出一種新的平衡方式,公式為
(16)
式(16)中:E為隨迭代次數(shù)變化著的振蕩型參數(shù)。
當(dāng)E>0.2時(shí),算法進(jìn)行全局搜索,否則進(jìn)行局部搜索。如圖3所示,算法在迭代中期也可進(jìn)行局部搜索,使得算法在搜索空間內(nèi)搜索得更加徹底;在迭代后期保留局部搜索方式的同時(shí)加入全局搜索,使得算法在迭代后期仍具有廣泛搜索的能力,幫助算法規(guī)避局部最優(yōu)。
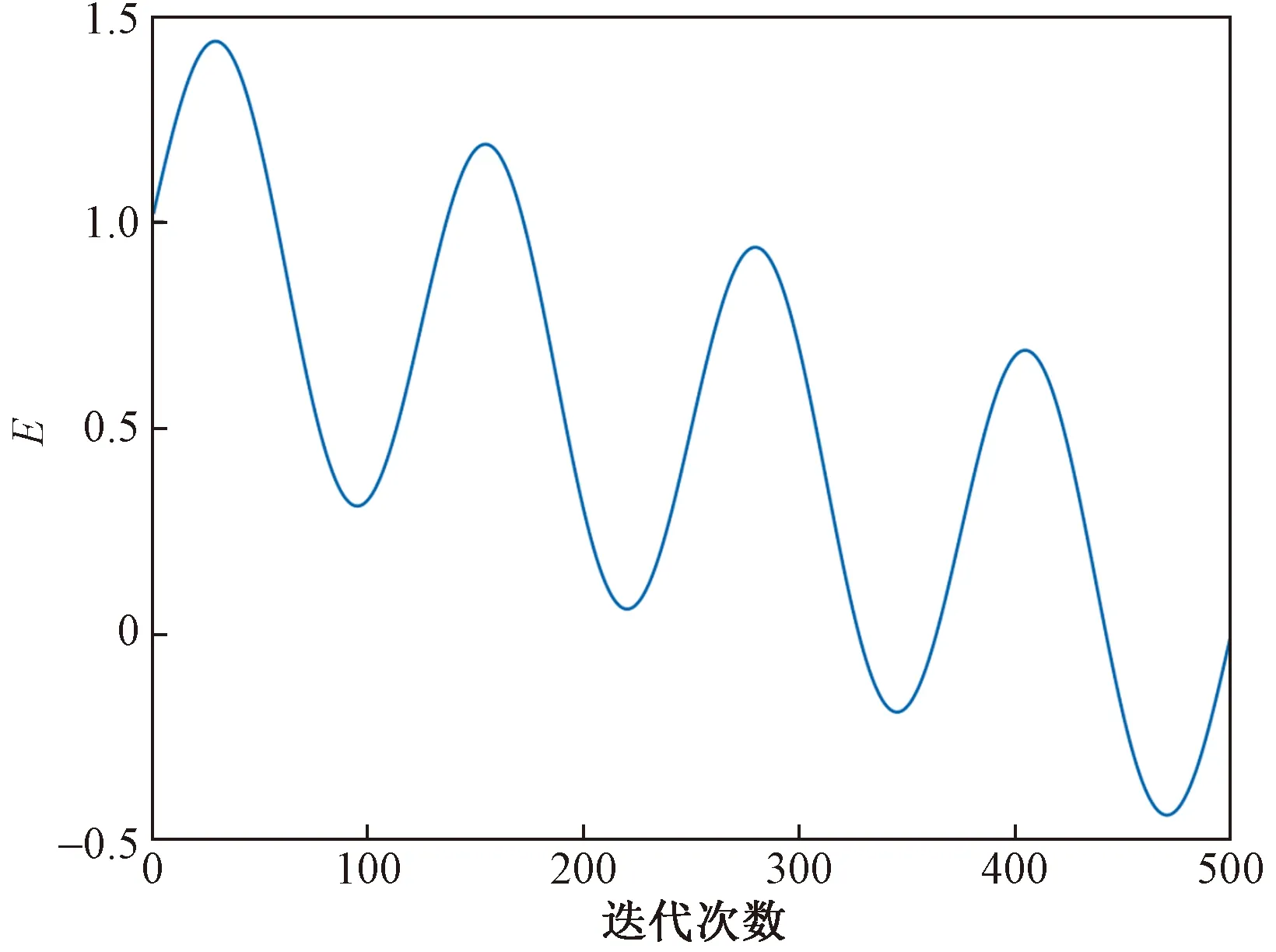
圖3 E值迭代曲線
2.2.3 參數(shù)G2的調(diào)整策略
G2是一個(gè)從2線性遞減到0的參數(shù),代表天鷹跟蹤獵物時(shí)從第一個(gè)位置到最后一個(gè)位置的飛行斜率。本文提出一種非線性遞減參數(shù),迭代曲線如圖4所示,即將式(13)中的G2調(diào)整為
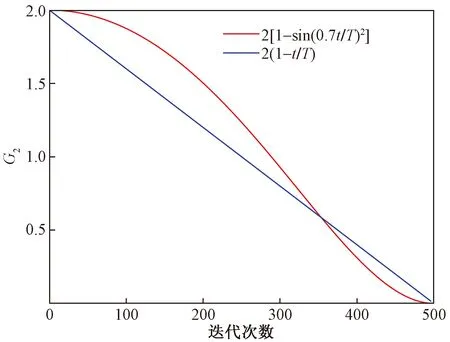
圖4 G2值迭代曲線
(17)
基于新的平衡方式,算法在迭代中期就進(jìn)行了局部搜索,此時(shí)改進(jìn)的G2具有較大的值,使得算法更加依賴Levy飛行,從而更加徹底的搜索解的空間;在迭代后期改進(jìn)的G2較小,受Levy飛行隨機(jī)大范圍搜索的影響小,因此上一步得到的最優(yōu)解Xbest(t)和歷史解X(t)將更加影響這一步的搜索結(jié)果,提升了迭代后期的局部搜索能力。
2.2.4 改進(jìn)的反向?qū)W習(xí)策略
反向?qū)W習(xí)策略[15](opposition-based learning,OBL)是指在算法迭代過程中,利用當(dāng)前解的位置產(chǎn)生一個(gè)對(duì)應(yīng)的反向位置,然后比較當(dāng)前解及其反向位置的適應(yīng)度值,假如反向位置的適應(yīng)度值優(yōu)于當(dāng)前解,則用反向位置代替當(dāng)前解的位置,利用反向位置進(jìn)入下一步的求解。
改進(jìn)的反向?qū)W習(xí)[14](improved opposition-based learning,IOBL)公式為
(18)
式(18)中:xij(t)為當(dāng)前解的位置;aj(t)為當(dāng)前解第j維的上界;bj(t)為當(dāng)前解第j維的下界;k1、k2均為0~1之間的隨機(jī)數(shù)。
(19)
采用改進(jìn)的反向?qū)W習(xí)策略,在算法探索階段后產(chǎn)生反向位置,增加了種群的多樣性,保證了算法在進(jìn)行開發(fā)階段之前擁有更好的當(dāng)前解,極大地幫助算法跳出局部最優(yōu),提升算法的計(jì)算精度。
2.2.5 IAO的基本流程
IAO的基本流程圖如圖5所示。
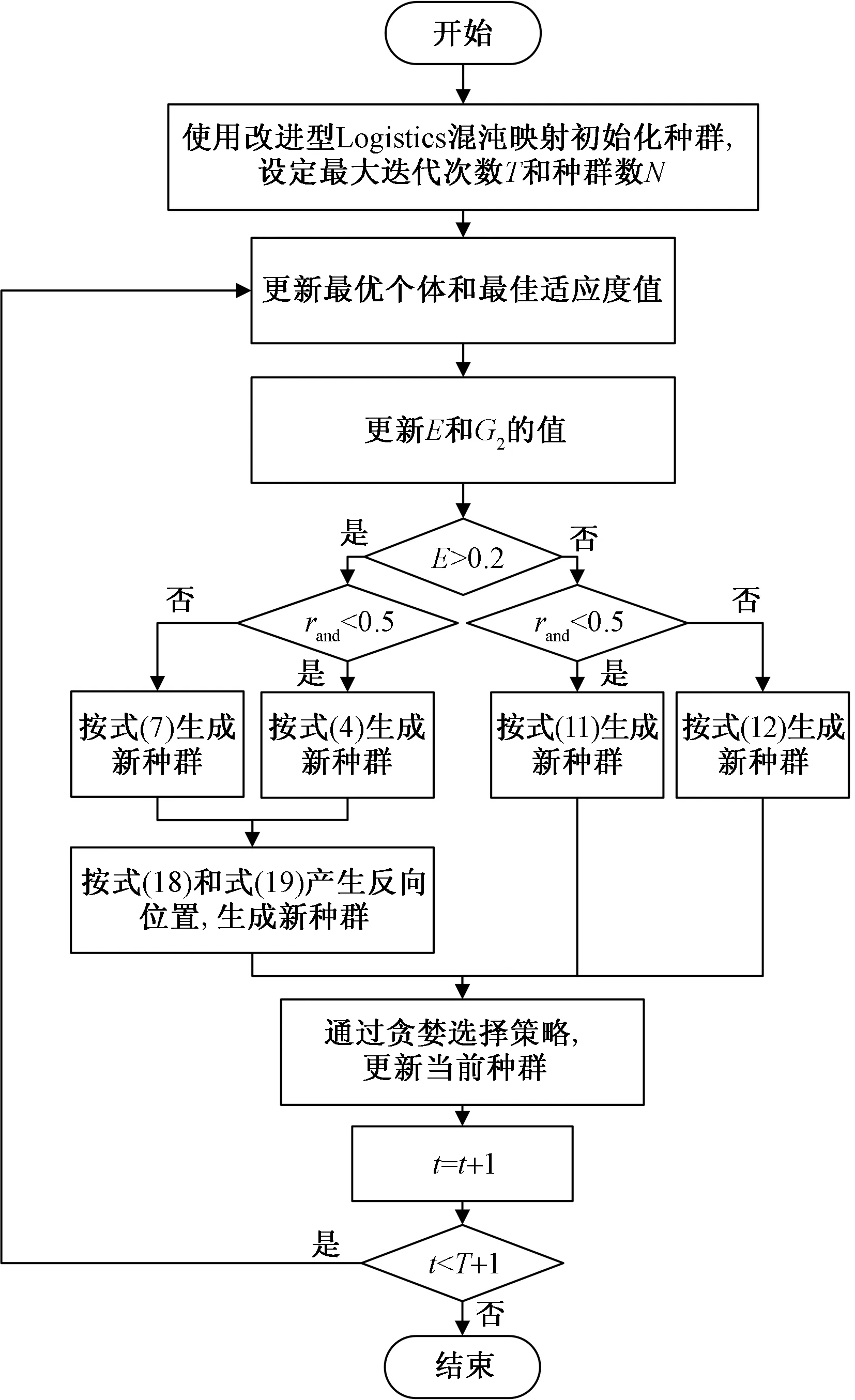
圖5 IAO優(yōu)化流程圖
3 十桿平面桁架結(jié)構(gòu)的優(yōu)化
為了檢驗(yàn)IAO在處理桁架結(jié)構(gòu)離散型優(yōu)化設(shè)計(jì)方面的能力,將IAO應(yīng)用于十桿平面桁架結(jié)構(gòu)的尺寸優(yōu)化。十桿平面桁架結(jié)構(gòu)如圖6所示,桿件和節(jié)點(diǎn)依次進(jìn)行了編號(hào)。所有桿件材料密度均設(shè)為0.1 lb/in3(1 lb/in3=27 679.9 kg/cm3),彈性模量為10 000 ksi (1 ksi=6.84 MPa),桿件的應(yīng)力約束為25 ksi,位移約束為2.0 in (1 in=25.4 mm)。外部荷載P施加在節(jié)點(diǎn)2和節(jié)點(diǎn)4上,大小為100 kips (1 kips=4.448 kN)。將10個(gè)桿件的橫截面積作為設(shè)計(jì)變量,將結(jié)構(gòu)總體質(zhì)量作為目標(biāo)函數(shù)。優(yōu)化變量從數(shù)據(jù)集S中選用,其中S=[0.1,0.5,1.0,1.5,2.0,2.5,3.0,3.5,4.0,4.5,5.0,5.5,6.0,6.5,7.0,7.5,8.0,8.5,9.0,9.5,10.0,10.5,11.0,11.5,12.0,12.5,13.0,13.5,14.0,14.5,15.0,15.5,16.0,16.5,17.0,17.5,18.0,18.5,19.0,19.5,20.0,20.5,21.0,21.5,22.0,22.5,23.0,23.5,24.0,24.5,25.0,25.5,26.0,26.5,27.0,27.5,28.0,28.5,29.0,29.5,30.0,30.5,31.0,31.5]in2,共有64種截面尺寸可供選擇。
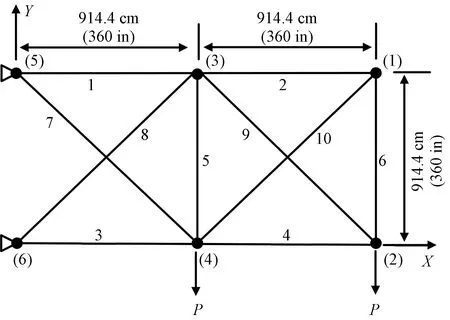
圖6 10桿平面桁架結(jié)構(gòu)
十桿平面桁架結(jié)構(gòu)優(yōu)化設(shè)計(jì)問題已被眾多學(xué)者用于測(cè)試算法的尋優(yōu)性能。歸納粒子群優(yōu)化算法(particle swarm optimization,PSO)、含被動(dòng)聚集因子的粒子群優(yōu)化算法(particle swarm optimizer with passive congregation,PSOPC)、啟發(fā)式的粒子群優(yōu)化算法(heuristic particle swarm optimization,HPSO)和螢火蟲算法(firefly algorithm,FA)的優(yōu)化結(jié)果,并與AO和IAO的計(jì)算結(jié)果進(jìn)行對(duì)比。設(shè)定AO和IAO的種群規(guī)模為50,總迭代次數(shù)為1 000,運(yùn)行30次。優(yōu)化結(jié)果如表3所示;迭代收斂曲線如圖7所示。
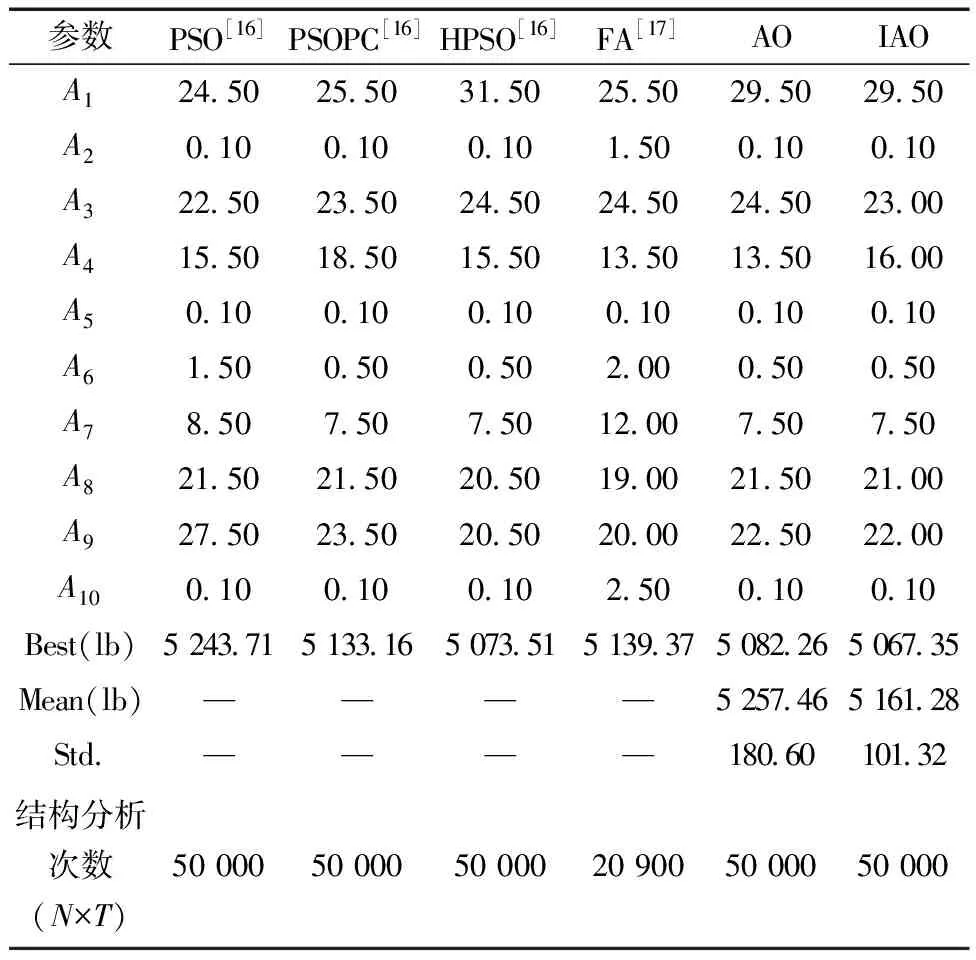
表3 十桿平面桁架優(yōu)化結(jié)果對(duì)比
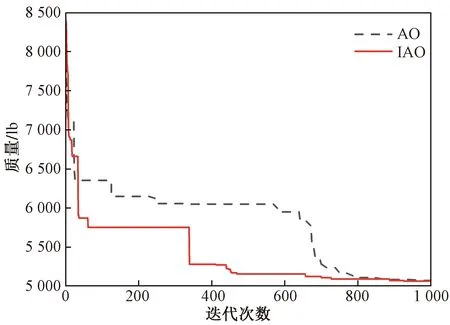
圖7 十桿平面桁架結(jié)構(gòu)優(yōu)化收斂曲線
由表3可知,IAO優(yōu)化結(jié)果是最佳設(shè)計(jì)方案,總質(zhì)量為5 067.35 lb,表明IAO具有較高的尋優(yōu)精度;在AO和IAO獨(dú)立運(yùn)行30次,結(jié)構(gòu)分析次數(shù)統(tǒng)一為50 000次的情況下,IAO獲得的十桿桁架結(jié)構(gòu)質(zhì)量平均值為5 161.28 lb,標(biāo)準(zhǔn)差為101.32,均比AO的計(jì)算結(jié)果小,表明改進(jìn)后算法在求解穩(wěn)定性方面得到了提升。為了驗(yàn)證IAO獲得的最優(yōu)解是否可行,將IAO提供的最優(yōu)解代入約束函數(shù)中檢查,此時(shí)節(jié)點(diǎn)最大位移為50.79 mm,沒有違反設(shè)定的位移約束條件;桿件最大應(yīng)力為169.80 MPa,沒有違反設(shè)定的應(yīng)力約束條件,因此IAO提供的設(shè)計(jì)方案是可行的。
圖7所示為IAO在迭代前期的收斂速度要高于AO,表明混沌映射初始化種群有利于算法在設(shè)計(jì)域內(nèi)快速尋優(yōu);AO在迭代至800次時(shí)陷入局部最優(yōu),反觀IAO能夠不斷地跳出局部最優(yōu)值,這是由于加入了反向?qū)W習(xí)策略和新的平衡搜索策略,使得IAO在迭代中期就可以進(jìn)行局部搜索,在迭代后期也可以在設(shè)計(jì)空間進(jìn)行全局尋優(yōu),提升了算法脫離局部最優(yōu)值的能力。
4 抱桿結(jié)構(gòu)的優(yōu)化
4.1 抱桿優(yōu)化模型
在有限元方法的基礎(chǔ)上,使用IAO對(duì)抱桿結(jié)構(gòu)進(jìn)行優(yōu)化,在滿足結(jié)構(gòu)承載力的情況下,尋找抱桿各部分所用角鋼的最合理尺寸。以結(jié)構(gòu)的強(qiáng)度、剛度和穩(wěn)定性為約束條件;以抱桿結(jié)構(gòu)各部分所用角鋼主材和輔材的截面尺寸為優(yōu)化變量;以抱桿整體的質(zhì)量最小化為目標(biāo)構(gòu)建優(yōu)化模型。
將抱桿結(jié)構(gòu)質(zhì)量記為W(x),結(jié)合罰函數(shù)法,可將優(yōu)化設(shè)計(jì)的目標(biāo)函數(shù)記為
(20)
式(20)中:k為約束個(gè)數(shù);g(x)為約束函數(shù);C為懲罰系數(shù),當(dāng)滿足約束時(shí),C=0。
以結(jié)構(gòu)的強(qiáng)度、剛度和穩(wěn)定性為約束條件為
(21)
式(21)中:σzmax為主材最大應(yīng)力;[σz]為主材許用應(yīng)力;σfmax為輔材最大應(yīng)力;[σf]為輔材許用應(yīng)力;δmax為抱桿頂部水平最大位移;[δ]為規(guī)范允許的最大位移;μ為屈曲系數(shù);[μ]為最小允許屈曲系數(shù)。規(guī)范規(guī)定搖臂抱桿的屈服強(qiáng)度安全系數(shù)和穩(wěn)定安全系數(shù)不小于2.0;主桿體有懸臂結(jié)構(gòu)的抱桿,桿體頂部的水平位移不得超過1.34H/100(H為抱桿的自由高度,等于抱桿自由段高與桅桿高度之和)。所以抱桿主材的許用應(yīng)力[σz]=172.5 MPa,輔材的許用應(yīng)力[σf]=117.5 MPa;最大允許位移[δ]經(jīng)計(jì)算為348.4 mm;穩(wěn)定安全系數(shù)即最小允許屈曲系數(shù)[μ]=2。
4.2 抱桿結(jié)構(gòu)的優(yōu)化計(jì)算
根據(jù)《熱軋等邊角鋼截面特性表》,選取邊寬范圍為40~110 mm的等邊角鋼建立截面庫。以抱桿主要四個(gè)部位的主材和輔材的角鋼型號(hào)為優(yōu)化變量,共8個(gè)離散變量。變量從截面庫中選用,截面庫如表4所示。x1,x2,…,x8分別代表抱桿普通段主材和輔材,加強(qiáng)段主材和輔材,桅桿主材和輔材以及搖臂主材和輔材。
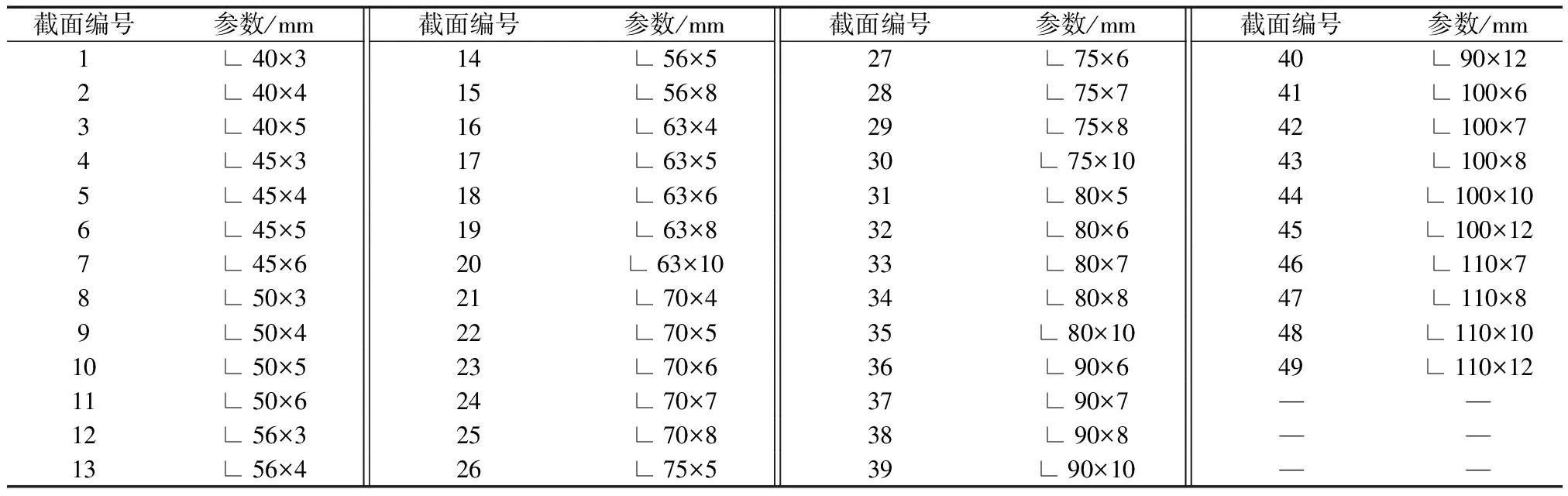
表4 抱桿截面型號(hào)庫
4.3 優(yōu)化結(jié)果
統(tǒng)一設(shè)定算法的總迭代次數(shù)T=100,種群數(shù)為10,針對(duì)此危險(xiǎn)工況進(jìn)行優(yōu)化。表5給出了蝴蝶優(yōu)化算法(butterfly optimization algorithm,BOA)、鯨魚優(yōu)化算法(whale optimization algorithm,WOA)、灰狼優(yōu)化算法(grey wolf optimizer,GWO)、AO和IAO的優(yōu)化設(shè)計(jì)結(jié)果。如表5所示,相比于其他算法,IAO找到了結(jié)果中抱桿的最佳設(shè)計(jì)方案,優(yōu)化后質(zhì)量為14.248 8 t,并且優(yōu)化得到的抱桿均滿足穩(wěn)定安全系數(shù)即屈曲系數(shù)不小于2.0。如表6所示,相比于原始設(shè)計(jì)方案,IAO優(yōu)化后抱桿質(zhì)量減輕了16.55%。

表5 5種算法的優(yōu)化結(jié)果

表6 抱桿優(yōu)化前后結(jié)果對(duì)比
圖8所示為5種算法對(duì)抱桿優(yōu)化后對(duì)應(yīng)的最大Mises應(yīng)力云圖。BOA和WOA優(yōu)化后的抱桿最大Mises應(yīng)力均發(fā)生在桿身加強(qiáng)段頂部主材,分別為163.67 MPa和144.48 MPa。GWO、AO和IAO優(yōu)化后的抱桿最大Mises應(yīng)力均發(fā)生在桿身普通段和加強(qiáng)段交界處主材,分別為160.19、160.42和167.84 MPa。優(yōu)化后得到的五種抱桿均滿足規(guī)范規(guī)定的2倍屈服強(qiáng)度系數(shù)。如圖9所示,優(yōu)化后的5種抱桿頂部水平位移均未超過348.4 mm,均滿足規(guī)范規(guī)定的剛度要求。
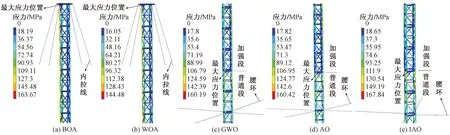
圖8 抱桿最大Mises應(yīng)力云圖
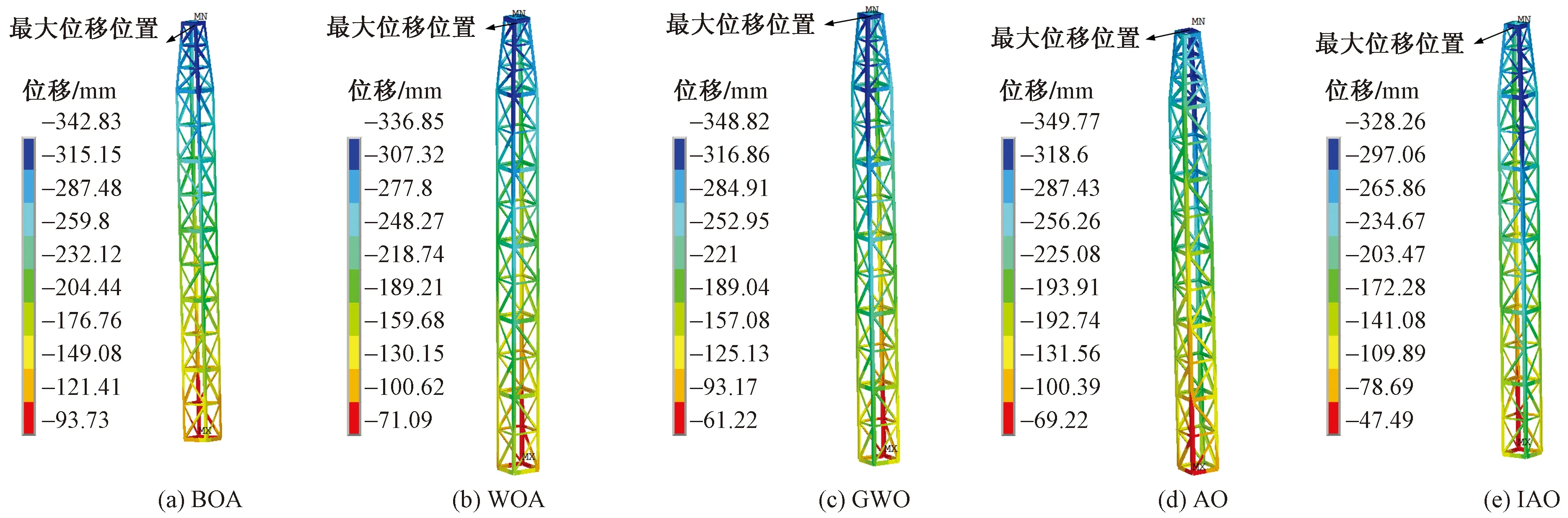
圖9 抱桿頂部最大水平位移云圖
圖10為5種算法的迭代收斂曲線,AO在迭代20次時(shí)陷入局部最優(yōu),而IAO能夠多次跳出局部最優(yōu)值直至算法迭代終止,并且最終獲得抱桿的最小質(zhì)量。因此,IAO具有最佳的尋優(yōu)性能。
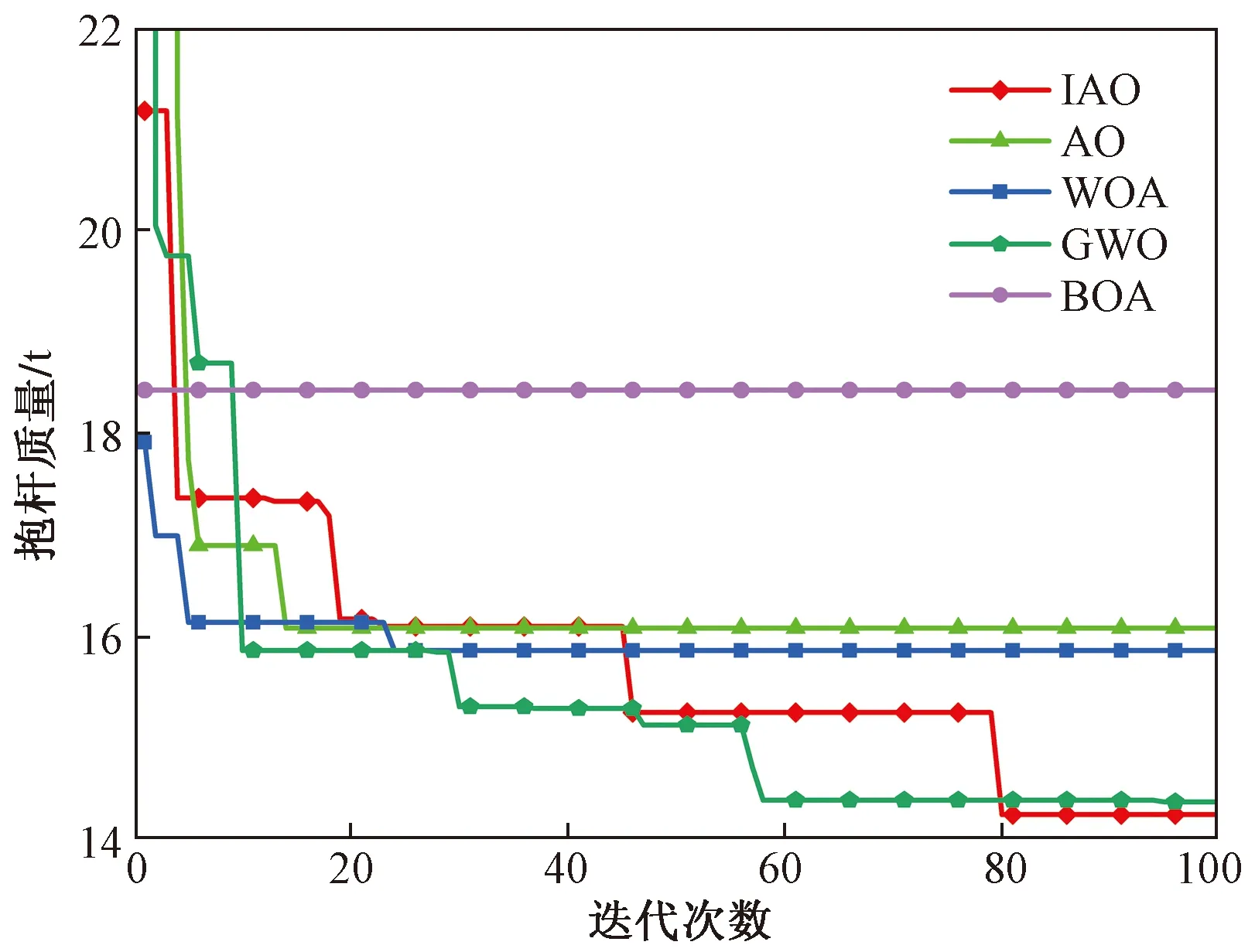
圖10 算法迭代曲線
5 結(jié)論
本文提出了一種改進(jìn)的天鷹優(yōu)化器,結(jié)合有限元方法和罰函數(shù)法,以結(jié)構(gòu)的質(zhì)量最小化為優(yōu)化目標(biāo),對(duì)十桿平面桁架和抱桿結(jié)構(gòu)進(jìn)行優(yōu)化設(shè)計(jì)。得到如下主要結(jié)論。
(1)IAO在AO中引入混沌映射、反向?qū)W習(xí)策略、非線性參數(shù)和新的平衡方式,算法的計(jì)算精度和脫離局部最優(yōu)的能力得到了有效提高。
(2)IAO得到了十桿平面桁架結(jié)構(gòu)的最佳設(shè)計(jì)方案。IAO在尋優(yōu)精度和求解穩(wěn)定性方面強(qiáng)于AO等算法,表明算法改進(jìn)策略的有效性。
(3)IAO得到了抱桿輕量化設(shè)計(jì)最佳方案,各部分所用角鋼型號(hào)更加合理,抱桿結(jié)構(gòu)在強(qiáng)度、剛度和穩(wěn)定性方面均滿足規(guī)范要求,抱桿整體質(zhì)量由17.074 2 t降為14.248 8 t,降幅為16.55%。
(4)IAO能夠有效地處理平面桁架和空間桿系結(jié)構(gòu)的工程優(yōu)化問題。
猜你喜歡
房地產(chǎn)導(dǎo)刊(2022年5期)2022-06-01 06:20:14
哲學(xué)評(píng)論(2021年2期)2021-08-22 01:53:34
建材發(fā)展導(dǎo)向(2021年12期)2021-07-22 08:06:48
建材發(fā)展導(dǎo)向(2021年7期)2021-07-16 07:07:52
中學(xué)生數(shù)理化(高中版.高二數(shù)學(xué))(2021年12期)2021-04-26 07:43:48
中學(xué)生數(shù)理化(高中版.高考數(shù)學(xué))(2021年12期)2021-03-08 01:28:50
中華詩詞(2019年7期)2019-11-25 01:43:04
模具制造(2019年3期)2019-06-06 02:10:54
影視與戲劇評(píng)論(2016年0期)2016-11-23 05:26:01
現(xiàn)代企業(yè)(2015年9期)2015-02-28 18:56:50