具有大行程的步進型壓電致動器研究綜述
2023-10-13 09:14:50陳玉國王宇航
重慶理工大學學報(自然科學) 2023年9期
張 韜,馬 瑞,王 陽,陳玉國,張 健,王宇航
(東北林業大學 機電工程學院, 哈爾濱 150000)
0 引言
隨著微納加工[1-3]、航空航天[4-6]及精密光學儀器[7]等領域的快速發展,使得對精密驅動技術提出了更高的要求,對分辨率的要求已經提高到納米尺度。隨著科技發展,為了滿足高精度定位與驅動的要求,驅動裝置在不斷更新,定位精度也從毫米級升級至納米級,甚至更高。精密驅動技術作為微納技術的關鍵部分,其發展水平嚴重影響著微納技術的發展。這種精密驅動與定位系統的關鍵在于,同時具有微/納米級別的定位分辨率、較大運動行程以及有足夠的承載能力等特點[8]。傳統的驅動裝置由于結構尺寸較大以及較低的定位精度導致很難應用在高精度定位領域當中[9]。
壓電致動器是一種新型的致動器,可以滿足精密定位系統中納米級定位分辨率的需求。壓電致動器一般基于壓電元件的逆壓電效應來產生位移運動,單個壓電元件的工作行程只有幾微米或幾十微米,這極大地限制了壓電致動器的應用范圍。為了克服這個問題,國內外相關學者提出了各種方法使壓電致動器實現大的工作行程(毫米級別,甚至幾厘米)[10]。目前,根據驅動原理不同,可以將壓電致動器分為直動型壓電致動器和步進型壓電致動器。直動型壓電致動器通常利用柔性放大機構放大壓電元件的輸出位移,然而,放大后的行程通常為幾十微米,這仍然是不夠的,如果增加放大比,則會使致動器的動態性能與輸出性能惡化。直動型壓電致動器相對于步進壓電致動器,具有輸出力大、工作帶寬大和連續性好的優勢,但是工作行程小,限制了直動型壓電致動器在未來大行程驅動領域中的應用。雖然步進壓電致動器每一步的運動位移很小,但是理論上積累的位移可以達到無窮大。并且,由于單步的位移非常小,所以可以實現較高的定位分辨率,因此,步進型壓電致動器在納米定位系統中越來越受到相關學者的關注,并取得了很大進展。
本文綜述了步進型壓電致動器的工作原理與研究進展,對比了幾種典型致動器在精密定位技術中的優劣,對幾種步進型壓電致動器的輸出性能做出了比較,并且指出了目前存在的問題及未來的發展趨勢。
1 典型高精度致動器比較
致動器是精密定位系統的核心部件,其輸出性能的優劣直接影響定位系統的工作性能。常見用于高精度驅動與定位系統中的致動器包含音圈電機、直線電機、伺服電機、步進型壓電驅動器以及直動型壓電驅動器等。
音圈電機(voice coil motor)是一種特殊形式的直接驅動電機,因其工作原理與揚聲器相似而得名。音圈電機具有結構簡單、體積小、高加速度、高線性度等顯著特征,在高精度定位伺服系統中得到廣泛應用。其運動行程一般在毫米級別,其定位精度級別為亞微米級,如果想達到百納米級別的定位精度,對其零件加工與安裝配合等因素有極高的要求。直線電機是一種能產生直線運動的電機,可以把電能轉換成直線運動的機械能,不需要任何中間傳動轉換裝置,因此,比旋轉電機經過轉換裝置形成的直線運動效率更高。雖然這些常規的致動器可以在一定程度上達到精密驅動和定位的目的,且具有更高的剛度和承載能力的優點,但由于摩擦、疲勞等關鍵因素限制了它們的應用,直線電機和音圈電機的定位精度都為亞微米級別,很難滿足近些年精密驅動技術的定位精度要求[11-12]。
近年來,壓電致動器作為精密定位與驅動領域的代表裝置之一,越來越多類型的壓電致動器被開發出來[13]。步進型壓電致動器由于具有較大的定位精度、工作行程以及較小的結構尺寸,被廣泛用于精密定位系統中。它還具有結構簡單,能耗低,響應速度快,以及可以實現納米級別的定位等優點,所以備受各界的關注。圖1表示了3種典型致動器輸出性能的比較情況[14-38]。其中步進型壓電致動器是以步進運動的方式累計位移的,所以其行程理論上可以無限大。直線電機的精度為亞微米級別,其行程由導軌的長度決定。
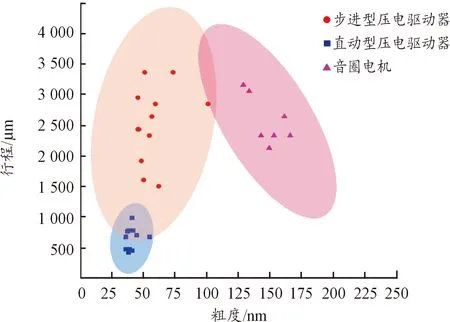
圖1 典型致動器輸出性能
其中步進型壓電致動器包括以下3種:尺蠖型壓電致動器、超聲型壓電致動器以及粘滑型壓電致動器[39-40]。尺蠖型壓電致動器是模仿真實的尺蠖的步進運動,通過夾緊單元和驅動單元之間的相互配合,實現大的工作行程。超聲型壓電致動器是基于逆壓電效應和超聲振動理論使動子產生運動的,其彈性體可被反向壓電效應激勵,在超聲頻率下產生橢圓諧振運動。粘滑型壓電致動器僅通過一個定子和一個動子之間的摩擦力就能產生相對運動,從而獲得較大的工作行程。本論文著重介紹以上3種步進型壓電驅動器的運動原理及研究現狀。
2 尺蠖型壓電致動器
2.1 尺蠖型壓電致動器運動原理
尺蠖型壓電致動器是科研學者通過模仿自然界尺蠖蠕動爬行的運動方式設計的,自然界中尺蠖的運動方式如圖2(a)所示,尺蠖的頭部以及尾部起著夾緊保持的作用,而軀干部分則擔當動力源,起推進作用。通過協調夾緊保持和推進的交替作用,尺蠖最終可以實現一曲一伸地連續行走運動。在尺蠖壓電驅動器的機械結構中,夾緊單元代替尺蠖的頭部和尾部,而驅動單元代替尺蠖的軀干部分[41]。將尺蠖的步進運動與壓電技術相結合,通過驅動單元與夾持單元的交替配合,實現尺蠖型壓電致動器的大工作行程,高精度及負載能力大等功能,在精密儀器和生物工程等領域被廣泛應用[42]。尺蠖型壓電致動器的運動原理如圖2(b)所示,其填補了直動型壓電致動器短工作行程的不足[43]。此外,還彌補了超聲型壓電致動器運動精度低、使用壽命短和傳輸效率低等不足[44]。
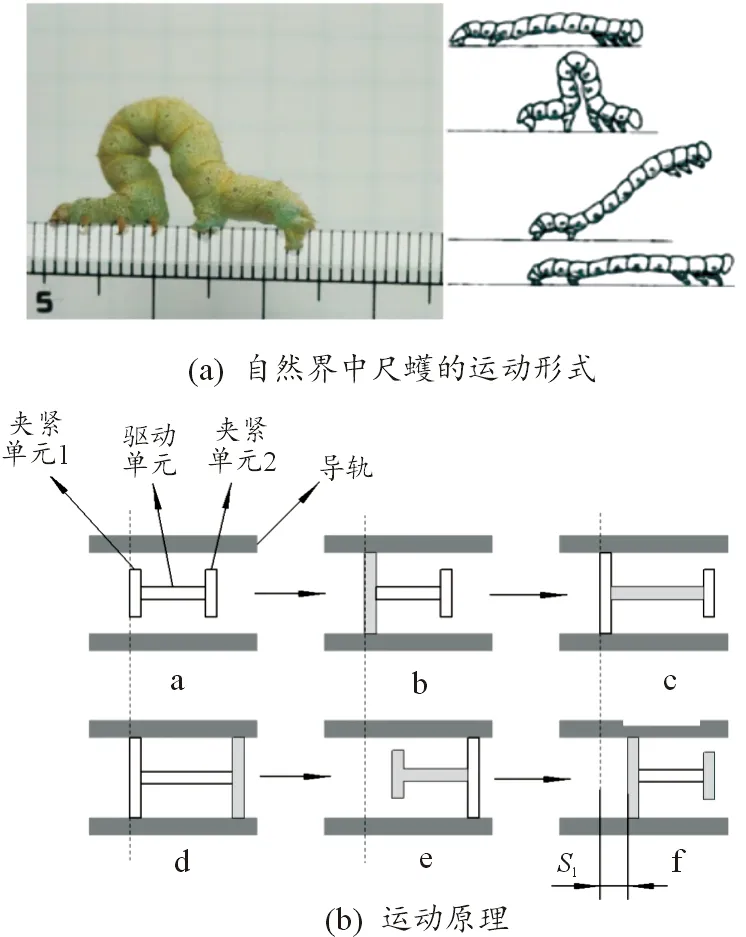
圖2 尺蠖型壓電致動器示意圖
尺蠖型壓電致動器通常由2個夾緊單元和1個驅動單元組成,其中,每個驅動單元配備1個或多個壓電元件,以實現所需的單自由度運動[45-46]。尺蠖型壓電致動器通過重復以下6個步驟產生步進運動:① 在初始位置,驅動單元和夾緊單元部分的壓電元件都不工作,因此,夾持單元和導向器之間存在間隙;② 夾緊單元1中的壓電元件通電,夾緊單元1與導軌夾緊;③ 驅動單元通電并獲得動力,壓電元件緩慢伸長,帶動夾緊單元2向右運動;④ 夾緊單元2通電獲得動力,與夾緊單元1一起夾緊導軌;⑤ 夾緊單元1斷電,壓電元件緩慢恢復原狀,松開導軌,驅動單元斷電,帶動夾緊單元1向右運動;⑥ 夾緊單元1通電,與導軌夾緊,夾緊單元2斷電,松開導軌,在此過程中,導向器的位置保持不動。雖然每一步的位移很小,但是重復以上6個步驟,尺蠖型壓電致動器會產生步進運動[47-48]。
2.2 研究現狀
1968年,第一個管狀蠕動型尺蠖致動器誕生,并被應用在精密加工中的材料定位上。1972年,Galutva研制了第一個真正意義上的蠕動型尺蠖致動器,并應用于精密定位。后來的許多尺蠖型壓電致動器的設計都以此為參照,圖3為典型的尺蠖型壓電致動器的構造示意圖。使用壓電堆疊可以在提升承載能力與運動速度的同時,使整體結構更加緊湊,此裝置最高可達每分鐘幾百毫米的運動速度,定位精度達到了微米級別,對于尺蠖型壓電致動器的發展有極其重要的意義[49]。
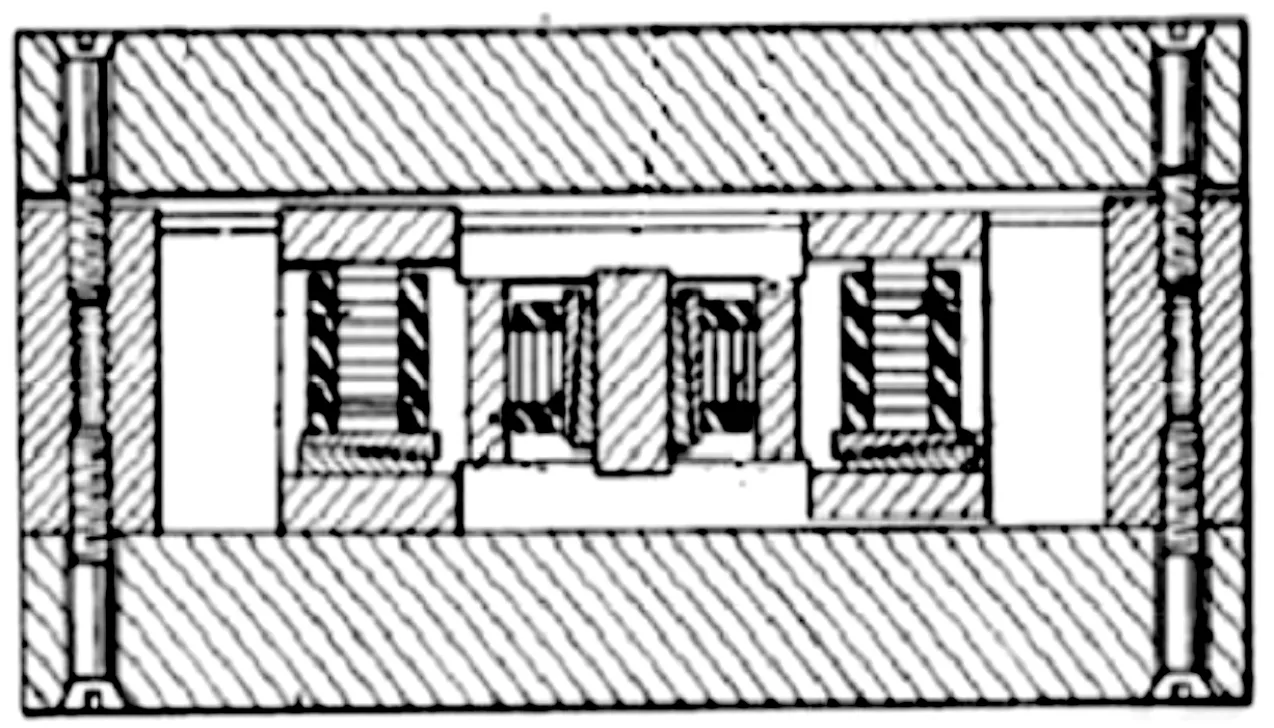
圖3 Galutva蠕動型尺蠖致動器結構示意圖
然而,由于當時壓電材料不成熟,尺蠖型壓電致動器的發展受到了很多阻礙。在隨后的一段時間里,雖然有一些尺蠖型壓電致動器問世,但大多都停留在理論研究上。直到20世紀80年代末,壓電元件才能夠提供數千牛頓的輸出力,驅動電壓從1×103V下降到200 V,這為壓電致動器的進一步發展提供了巨大的機遇。1986年,Hara等[50]利用壓電堆疊研制了一種尺蠖型壓電致動器,使輸入電壓降到0~200 V,此后,越來越多的學者開始關注尺蠖型壓電致動器的發展。
但是,尺蠖型壓電驅動裝置面臨的一個重要問題是壓電元件的輸出位移很小,夾緊單元無法夾緊滑塊。因此,很多學者用不同的方法對夾緊裝置進行改進。柔性鉸鏈由于具有響應速度快,無摩擦損耗等優點,被廣泛應用于壓電致動器的設計中,以增大壓電致動器的輸出位移[51]。
Yan等[14]研制了一種雙向互補式尺蠖型壓電致動器,其結構見圖4。此裝置夾緊動作由橋式機構完成,釋放動作由杠桿機構完成,經過實驗可得,此尺蠖型壓電致動器具有雙向可變的步進運動,通過逐步精細定位控制,可實現最大分辨率為1 nm。并且在此基礎上研究了一種基于電壓序列的變步長控制方法,此方法應用在致動器中可以調節夾緊力,在可變步長的運動中具有更高的運動穩定性和承載能力。Cai等[15]研制了一種杠桿型放大機構壓電致動器的線性步進式壓電平臺,如圖5所示。此平臺使用了2個堆疊壓電元件(d33模式)、2個剪切壓電元件(d15模式)、2個平行的剪切壓電元件產生動子運動所需的側向運動,2個平行的堆疊壓電元件作用在杠桿放大機構,以調整2個剪切型壓電元件與動子之間的相對位置,從而使平臺獲得不同的負載能力。此平臺具有納米級別分辨率的高精度定位模式及大行程范圍的粗略定位模式,使步進型壓電驅動平臺達到了納米級的定位精度。Ghenna等[16]研發了一種小型化、高驅動力、高阻抗的尺蠖型壓電驅動馬達,如圖6所示,該驅動馬達由1個擴展機構和2個雙夾緊機構組成,其中,雙夾持機構的作用是在動子和動子之間提供較高的夾緊力(2 500 N),而擴展機構的作用是利用柔性機構放大壓電元件的輸出位移(自由行程下為0.01 mm)和提高夾緊力(500 N)。
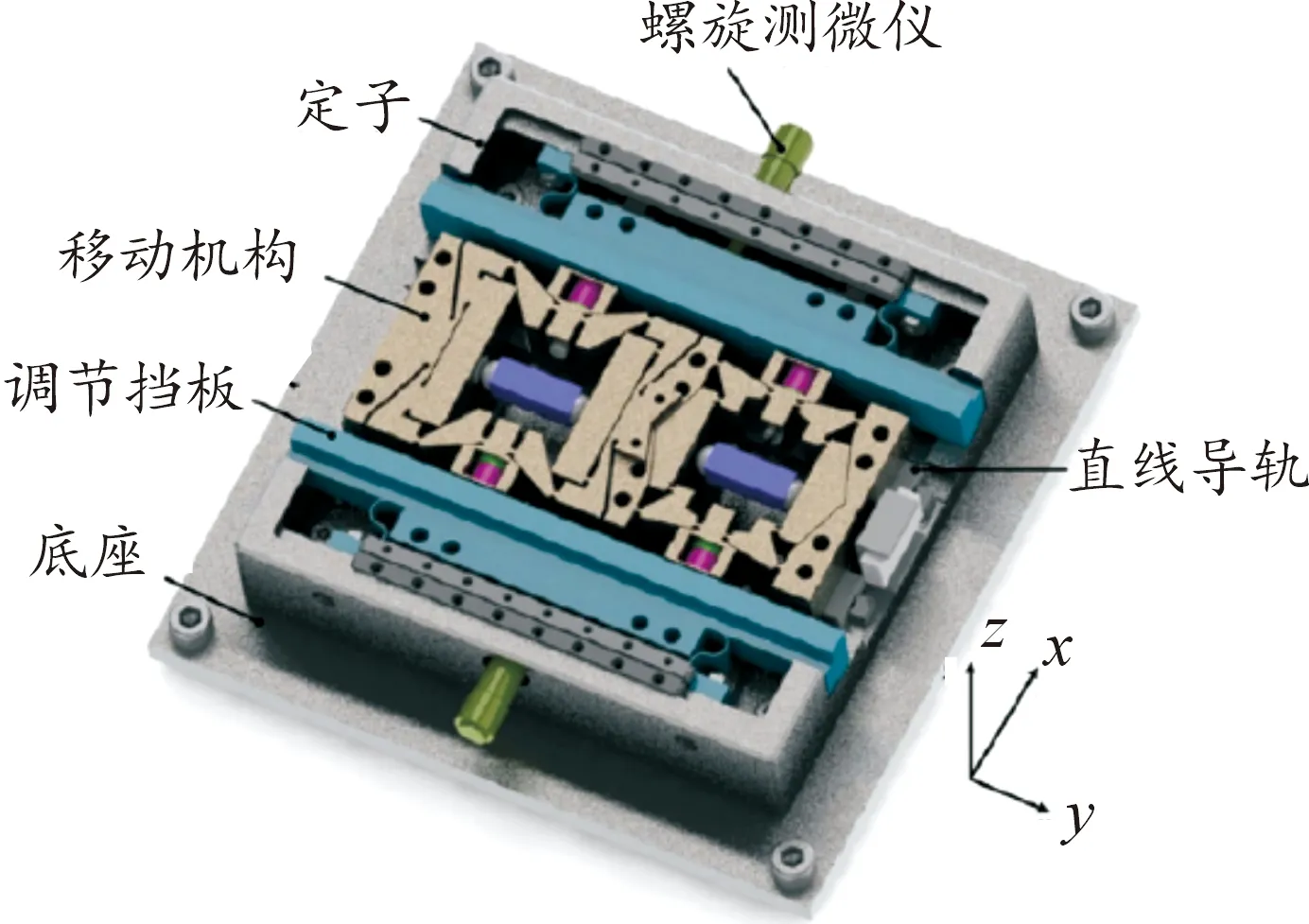
圖4 雙向互補式尺蠖型壓電致動器結構示意圖
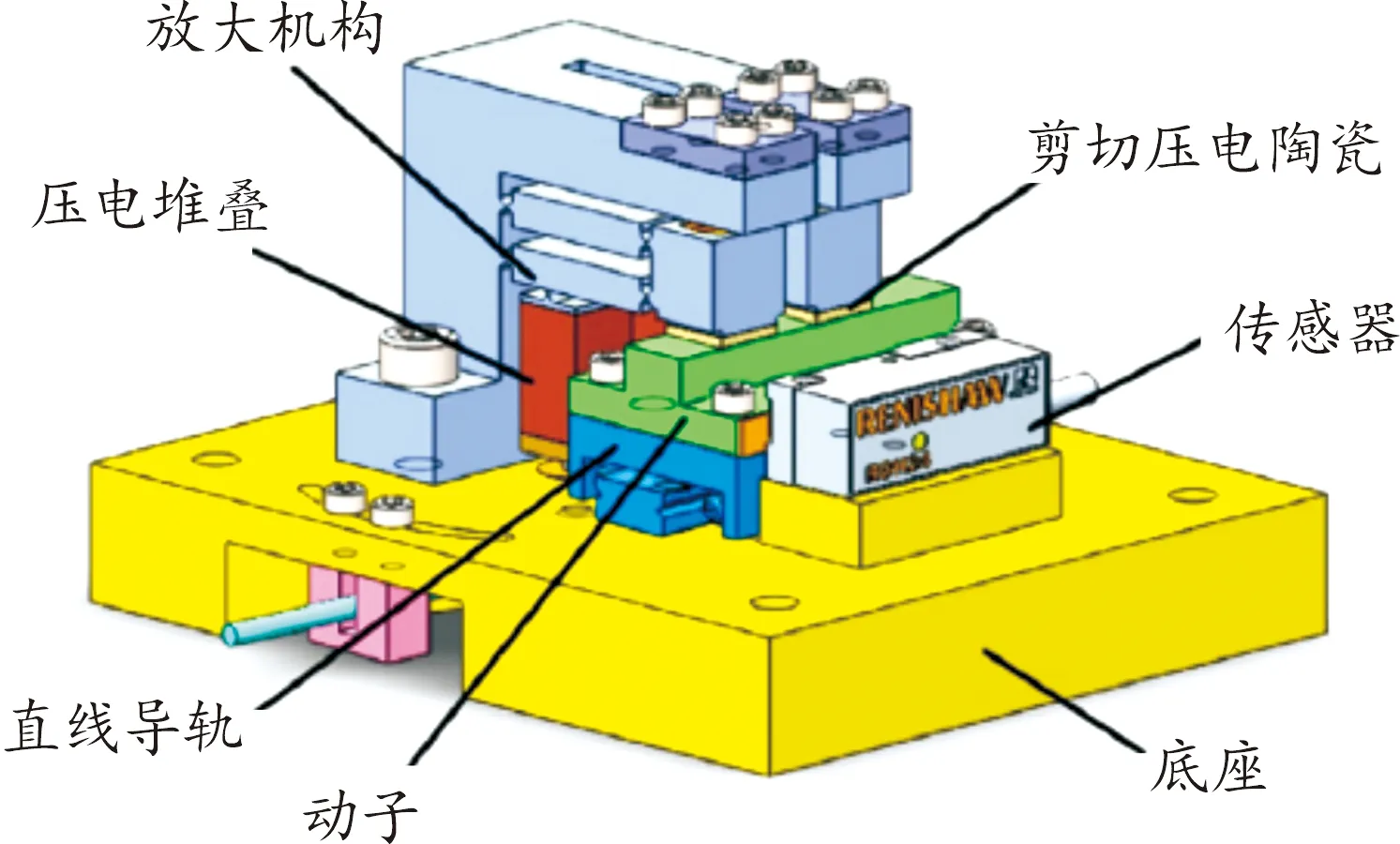
圖5 線性步進式壓電平臺結構示意圖
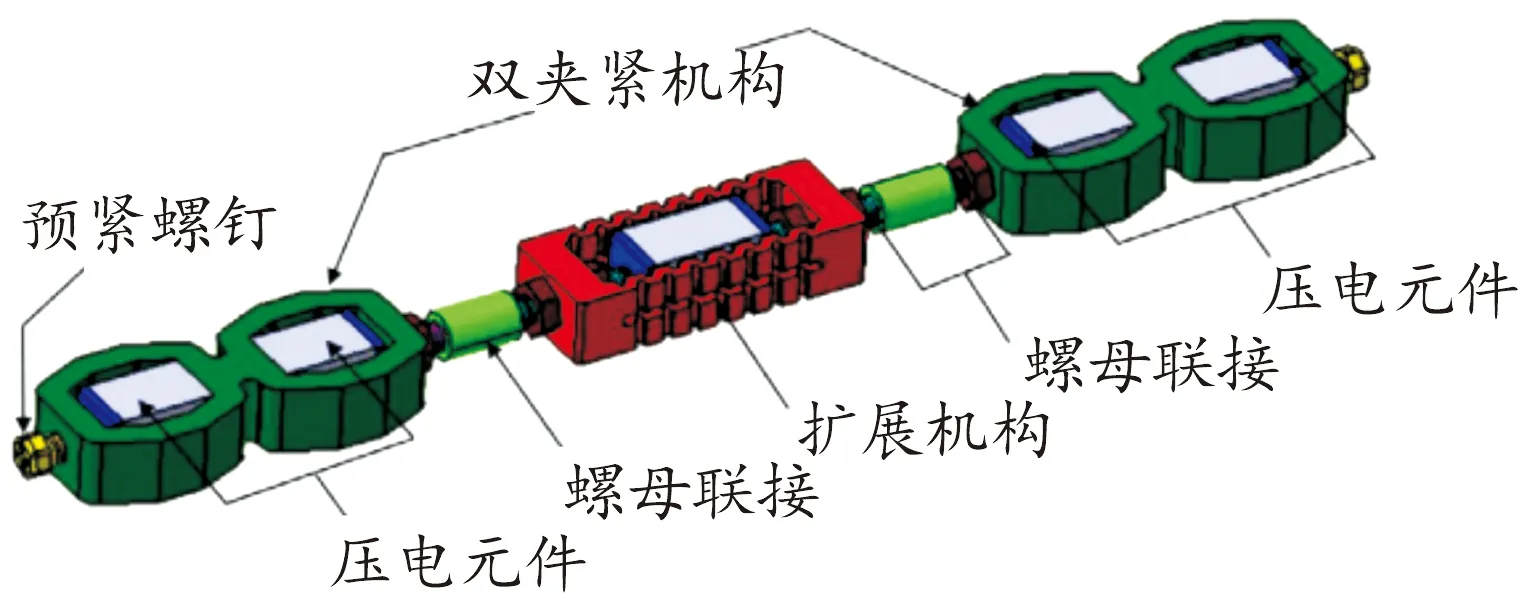
圖6 尺蠖型壓電驅動馬達動子結構示意圖
隨著工業中微/納米物體處理和納米定位的發展,具有納米分辨率的高精度定位是提高掃描質量和操作精度的關鍵技術,并在爬桿機器人[17]上顯示出重要的應用前景。大多數基于電磁或靜電電機的爬桿機器人普遍存在尺寸大、位移分辨率低的問題,這大大減少了爬桿機器人的工作空間,影響機器人完成檢測任務的效率,使用壓電致動器的機器人可以緩解這些問題。與電磁馬達和氣動元件相比,壓電致動器具有分辨率高、結構簡單、工作穩定、響應速度快、抗電磁干擾等優點,這些優點促使研究人員開發由壓電致動器驅動的機器人系統。
為了解決上述爬桿機器人尺寸大和定位分辨率低的問題,Ma等[18]提出了一種基于尺蠖型壓電運動的爬桿機器人,其結構如圖7所示,該機器人具有負載質量高、體積小(50 mm×54 mm×86 mm)、分辨率高等優點。
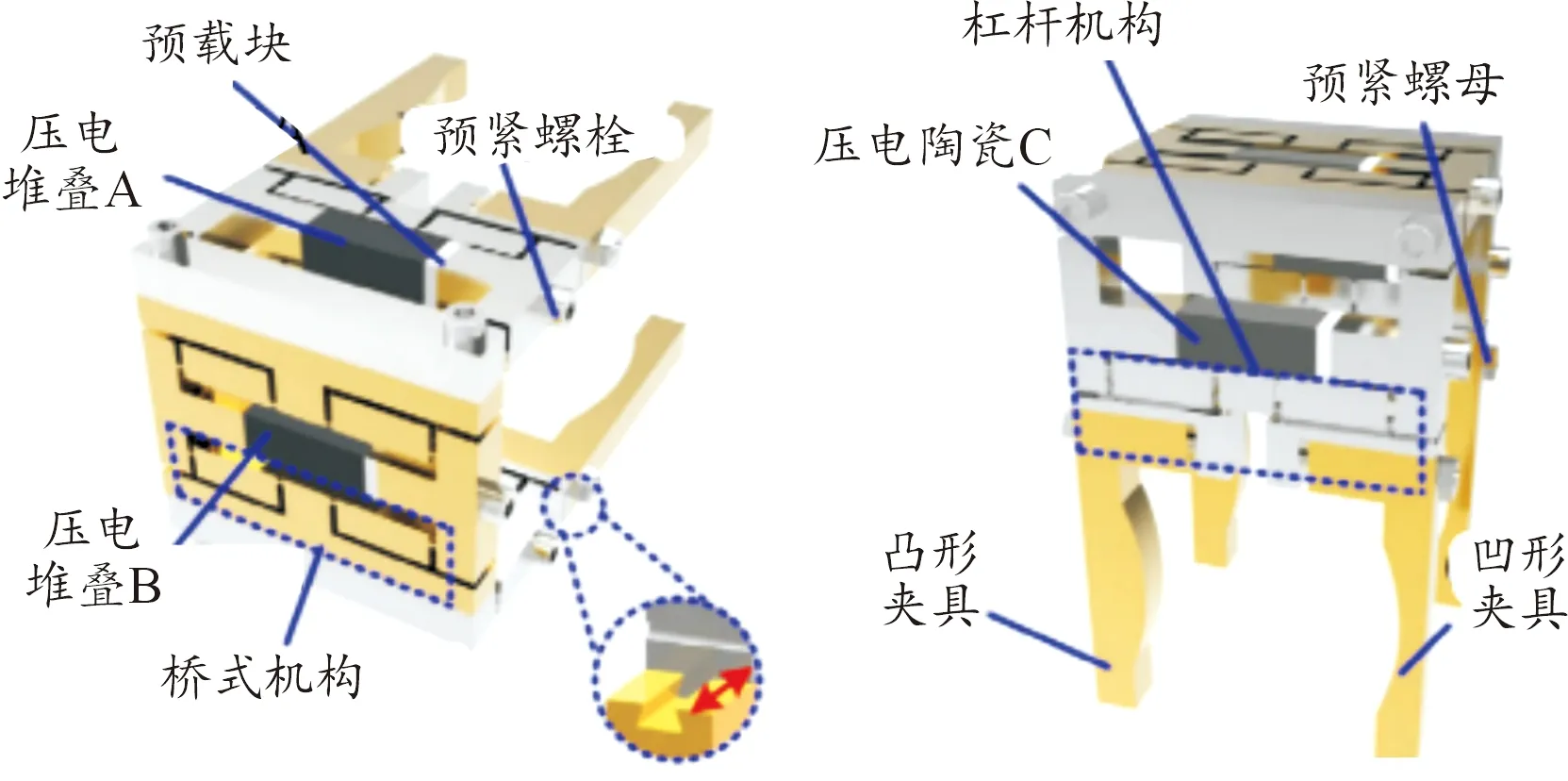
圖7 爬桿機器人結構示意圖
實驗結果表明,此機器人在電壓為150 V、頻率為9 Hz的情況下,最大轉速可以達到100.9 μm/s,負載質量比為1.42,位移分辨率為85 nm,此方案保證了機器人在工作時定位分辨率高,同時具有大的位移速度。為了解決尺蠖型壓電致動器運動速度低的問題,該團隊在2022年研制了一種雙壓電堆疊驅動的步進式尺蠖致動器[19],其結構如圖8所示,該致動器具有承載能力大、無反向運動的特點,繼承了傳統尺蠖致動器的優點。此裝置中每個夾緊足可以借助雙菱形柔性機構,在夾緊單元和釋放單元之間來回切換,并且具有大承載能力和無回退運動的特點。實驗結果表明,此尺蠖型壓電致動器的最大速度為471.01 μm/s,載荷為6.1 kg,輸出力為11.76 N。
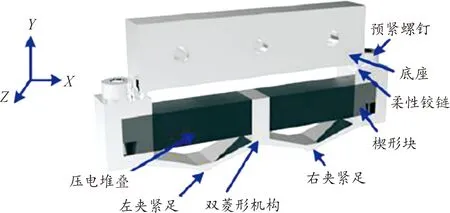
圖8 步進式尺蠖致動器結構示意圖
德國physik instrumente(PI)公司在尺蠖型壓電致動器行業長期處于領先地位,該公司生產的尺蠖型壓電致動器產品可滿足10~125 mm的行程范圍,如果導軌足夠長,行程理論上可以無限大;其分辨率閉環工作情況下小于10 nm,開環工作情況下可達到0.02 nm左右,速度為10~15 mm/s,驅動力一般為50 N,最高可達300 N,具有良好的輸出性能,同時兼具高分辨率、大驅動力、較高的速度等特點。圖9所示為PI公司生產的N-331型尺蠖壓電致動器(圖片來源于公司官網)。

圖9 PI公司生產的尺蠖型壓電致動器產品實物圖
國內制作基于尺蠖原理的壓電致動器的廠家有哈爾濱芯明天科技有限公司,其生產的N31系列高精度直線壓電馬達運動平臺的行程有25、50、100 mm三種規格;主動推拉力可達30 N,最大運動速度可達10 mm/s,閉環分辨率一般<10 nm,開環分辨率<0.1 nm。圖10所示為該公司生產的N31型尺蠖壓電致動器(圖片來源于公司官網)。
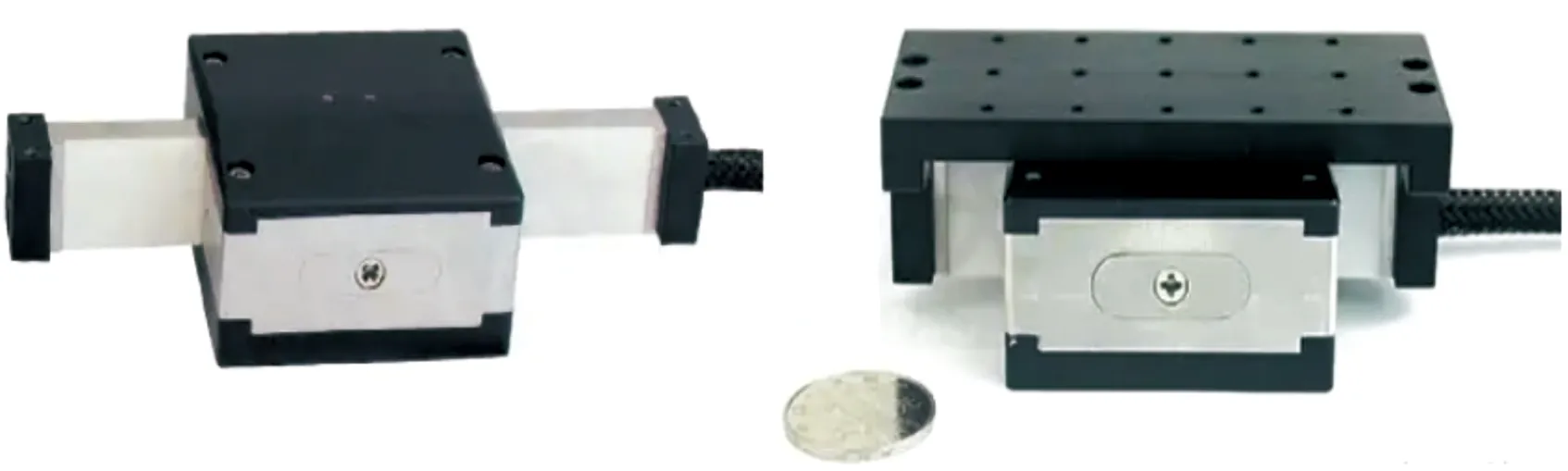
圖10 芯明天公司生產的尺蠖型壓電致動器產品實物圖
綜合以上研究工作,尺蠖型壓電致動器是采用自然界中的尺蠖運動模擬的仿生設計理念,通過多個驅動單元與夾持單元相互配合、交替運動,實現大行程、高精度的連續運動輸出[52-53],還具有輸出能力強等優點。然而,尺蠖型壓電致動器通常結構比較復雜,有多個壓電元件,應用時有制造、裝配及控制等方面的困難,在以后的研究中,應予以改善和解決。
3 超聲型壓電致動器
3.1 超聲型壓電致動器運動原理
超聲型壓電致動器也被稱為超聲電機或超聲馬達,是利用壓電材料帶動彈性體在超聲頻段內產生震動,通過定子與動子之間的摩擦產生運動。與電磁馬達相比,具有控制精度有高、響應快[54-55],功耗低、不受電磁干擾[56-57]等優點。
超聲型壓電致動器根據超聲波傳播的方式可分為駐波型和行波型。如圖11(a)所示,駐波型壓電致動器的驅動原理是通過電信號激發2個相互垂直的壓電元件高頻振動,使彈性體做橢圓軌跡運動,帶動動子進行移動。在從A到B的過程中,彈性體接觸到動子,帶動動子運動。從B到A的過程,彈性體不與動子接觸,不會使動子移動,這是一種間斷性的驅動模式。如圖11(b)所示,行波型超聲壓電致動器的驅動原理是通過多個壓電元件協調運動,使定子表面的每個點都按照橢圓的軌跡運動,進而推動動子進行移動,這是連續性的驅動模式[58]。

圖11 超聲壓電致動器的驅動原理示意圖
3.2 研究現狀
1961年,第一臺超聲型壓電致動器由美國寶路華公司研制并實際應用成功,用于驅動鐘表內的齒輪運轉帶動指針旋轉。在1978年時,Vasiliev等利用壓電材料的超聲換能原理成功研制了一種新型的超聲型壓電致動器,提高了超聲型壓電致動器的負載能力與輸出功率,但是其輸出性能不穩定,不能廣泛應用。隨后Sashida設計了一種駐波型超聲波壓電致動器,又在1982年研發了行波型超聲波壓電致動器,改變了駐波型超聲波壓電致動器中定子與轉子接觸點固定不變的工作環境,顯著改善了二者之間的摩擦磨損情況。
2021年,Ryndzionek等[20]對多個單元的超聲壓電馬達進行了研究,將旋轉模式電機與行波電機的拓撲結構結合起來(結構如圖12所示),在超聲頻率為24.4 kHz時,驅動轉矩可達到68 mN·m,電機速度可達42 r/min,通過多次對比實驗,得到使用材料為鋁的定子結構會使多單元超聲壓電馬達具有更好的輸出性能,最大扭矩提升了13%,定子制造成本降低了41%。Wang等[21]研發了一種具有納米分辨率的超聲型懸臂壓電電機,電機的三維模型如圖13所示。
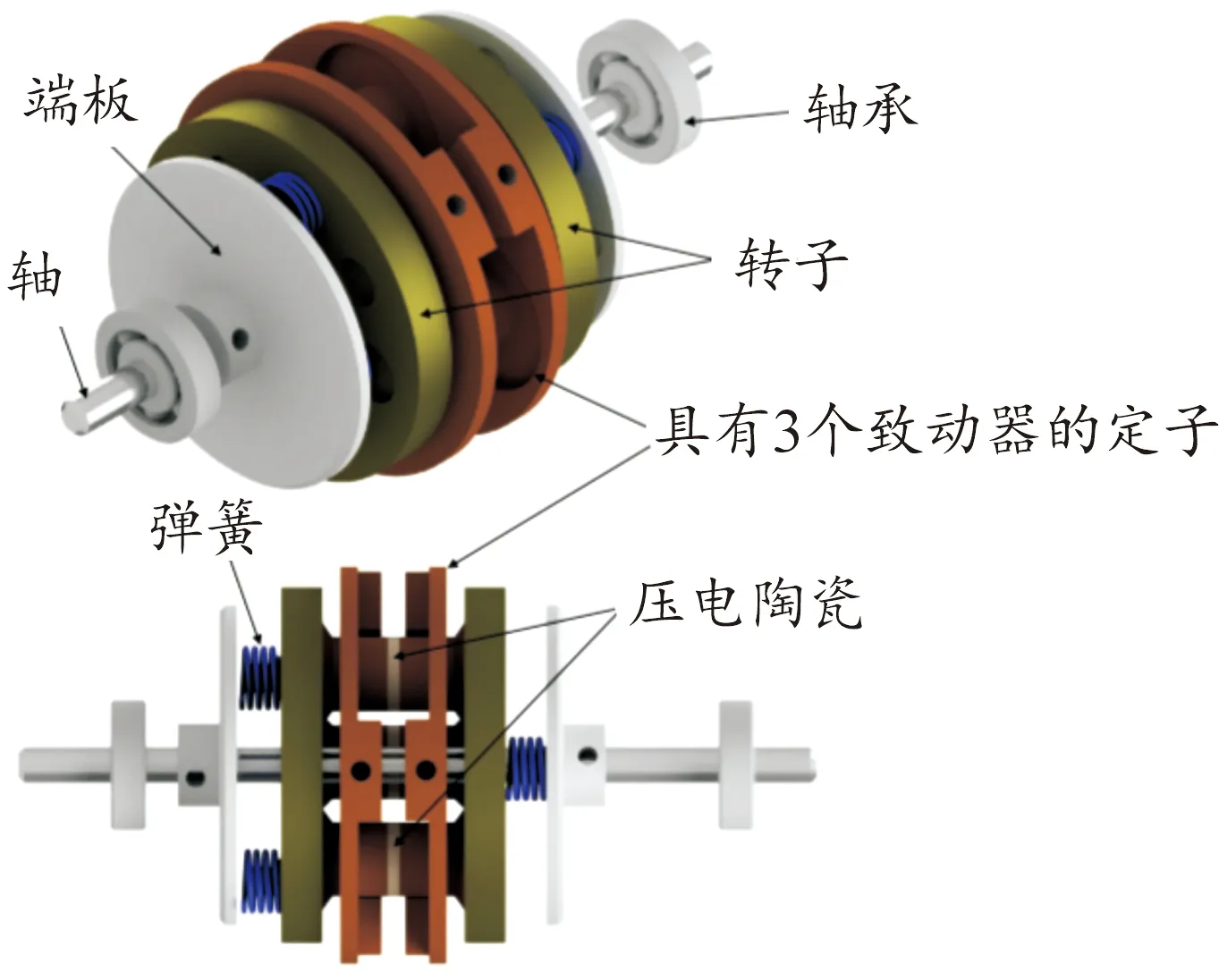
圖12 超聲壓電馬達結構示意圖
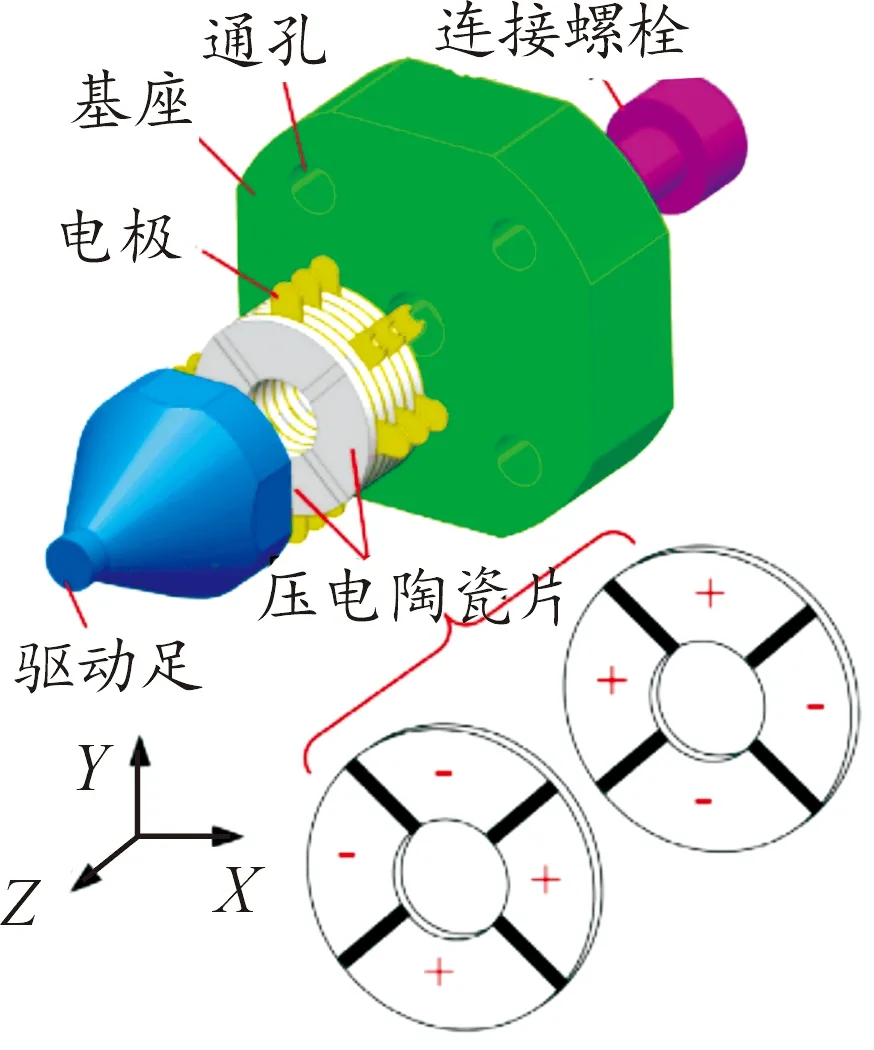
圖13 超聲型壓電電機的三維模型示意圖
采用3個正交的第一彎曲震動模式,在驅動尖端形成橢圓運動來形成滑塊,該電機的總尺寸為30 mm×30 mm×34.2 mm。實驗結果顯示,當頻率和電壓分別為22.7 kHz和200 Vp-p時,該電機的輸出速度為344.35 mm/s。在電壓為100 Vp-p,預加載在50 N的情況下,測試了最大輸出力約為8 N。此外,在諧振工作狀態下,該壓電電動機的高位移分辨率為48 nm。Zhang等[22]研制了一種微型駐波直線超聲電機,如圖14所示。該電機利用一階縱向震動模式與二階彎曲震動模式耦合原理,以固定頻率實現雙向驅動。此電機可產生81.1 mm/s的線速度及5.7 gf以上的驅動力,輸出性能較好。
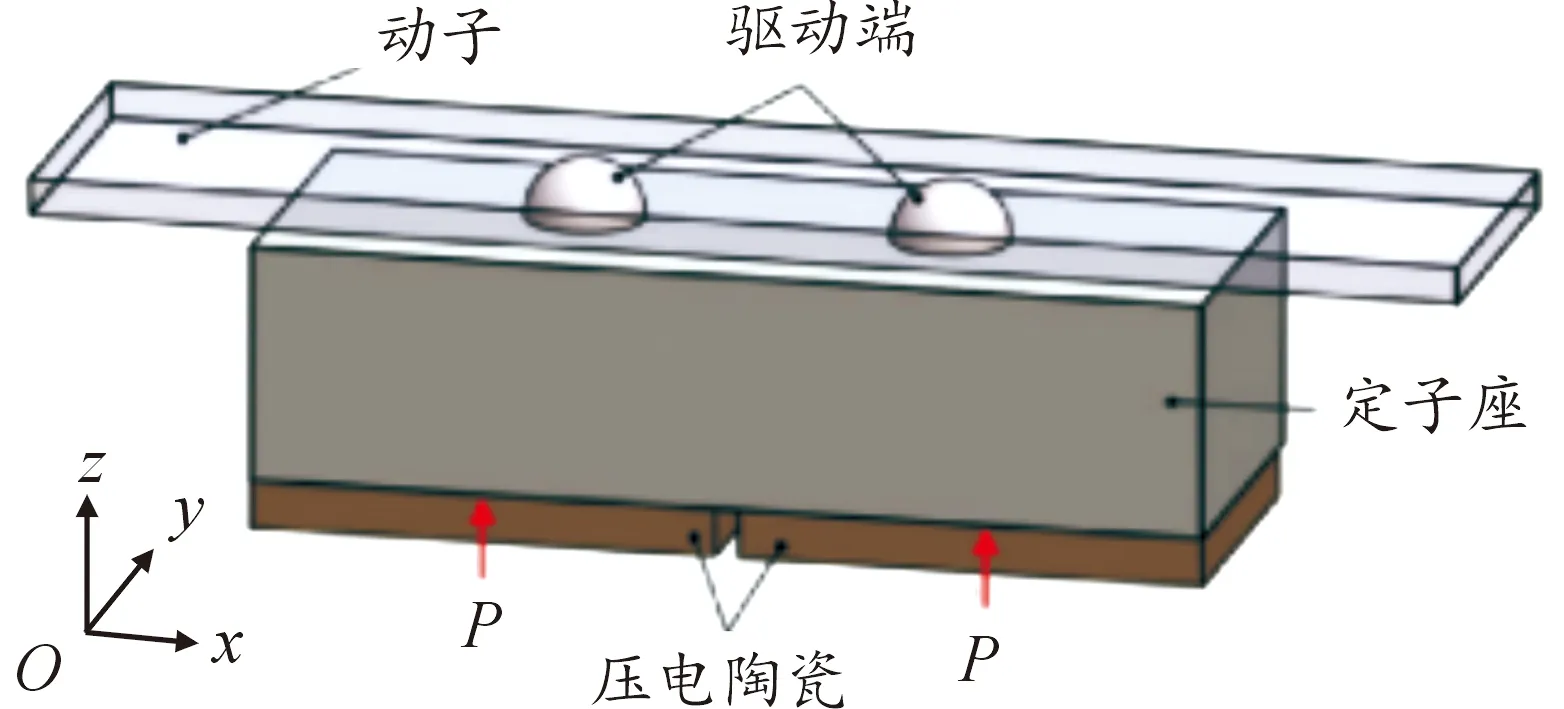
圖14 微型駐波直線超聲電機結構示意圖
Wu等為了解決傳統旋轉電機[23]中使用的振動模式和驅動結構難以實現高扭矩密度和高功率密度這個問題,研制出了一種以扭轉/彎曲為工作模式的超聲棒狀轉換器,如圖15所示[24]。
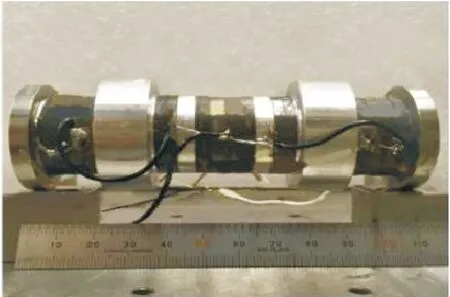
圖15 大功率超聲電機實物圖
通過實驗驗證,在頻率為21.64 kHz時,最大轉矩和最大輸出功率分別達到10.1 N·m和38.1 W。同時,它產生的轉矩密度和功率密度分別為20.0 N·m/kg和75.7 W/kg。此團隊為了提高超聲馬達的扭矩密度/功率密度,提出了一種縱向行波和彎曲行波混合激勵的驅動方法,并成功應用于十字形、2自由度直線超聲電機中,如圖16所示[54]。通過實驗得到,此裝置在X軸上產生的最大推力為84.3 N,空載運行速度為 1 562 mm/s,最大輸出功率為33.2 W;在Y軸上的最大推力為86.2 N,空載運行速度為1 531 mm/s,最大輸出功率為34.1 W。驅動力密度為 78.4 N/kg,功率密度為31 W/kg,均優于傳統的兩自由度超聲直線電機。
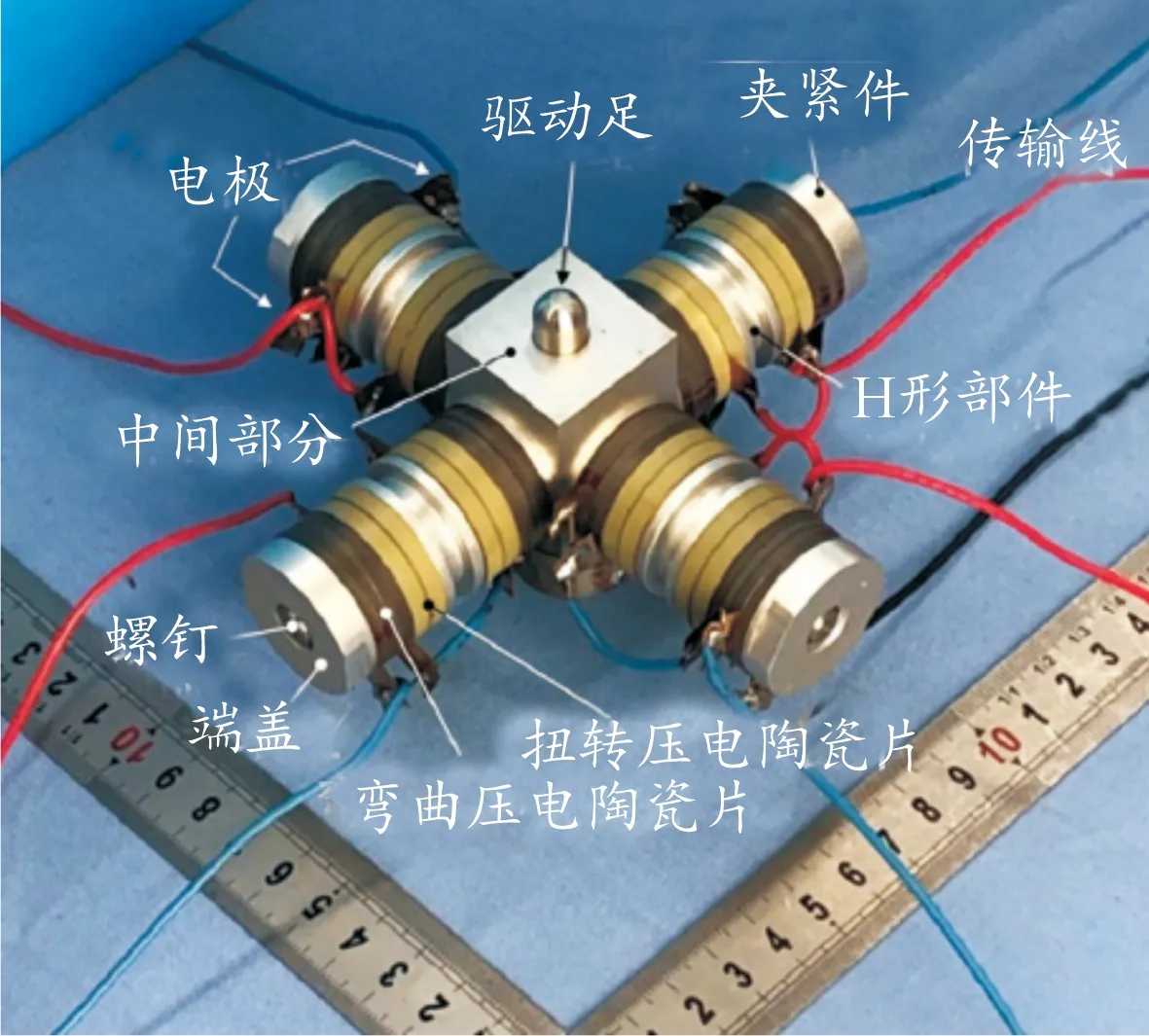
圖16 壓電直線超聲電機實物圖
超聲型壓電致動器通過它們的諧振工作狀態驅動動子獲得高速運動[59]。Yun等[61]的開槽型超聲波電機的最大速度為1.12m/s。Liu等[62]設計了一種使用彎曲換能器的超聲波電機,并獲得了1.527 m/s的高速度。需要注意的是,在超聲型壓電致動器中,諧振頻率的匹配是一個必不可少的過程,這使得超聲型壓電致動器的設計過程非常復雜。超聲型壓電致動器還存在嚴重的磨損和發熱問題,這意味著超聲型壓電致動器不能長時間連續工作[60]。Li等[63]研究了超聲波電機的熱特性,并發現當電機運行20 min時,溫度上升超過70 ℃。
德國的physik instrumente(PI)公司制造的超聲型壓電致動器輸出性能較高,直線型的驅動器分為緊湊型線性平臺(一維)和緊湊型XY位移平臺(二維)。其中一維運動平臺的行程有18 mm和22 mm,負載為2 N,速度為200 mm/s。二維運動平臺在X、Y方向上的位移最大可達到25 mm,速度最大為100 mm/s。負載能力最大為50 N。圖17所示為PI公司生產的超聲型壓電驅動器(圖片來源于公司官網)。
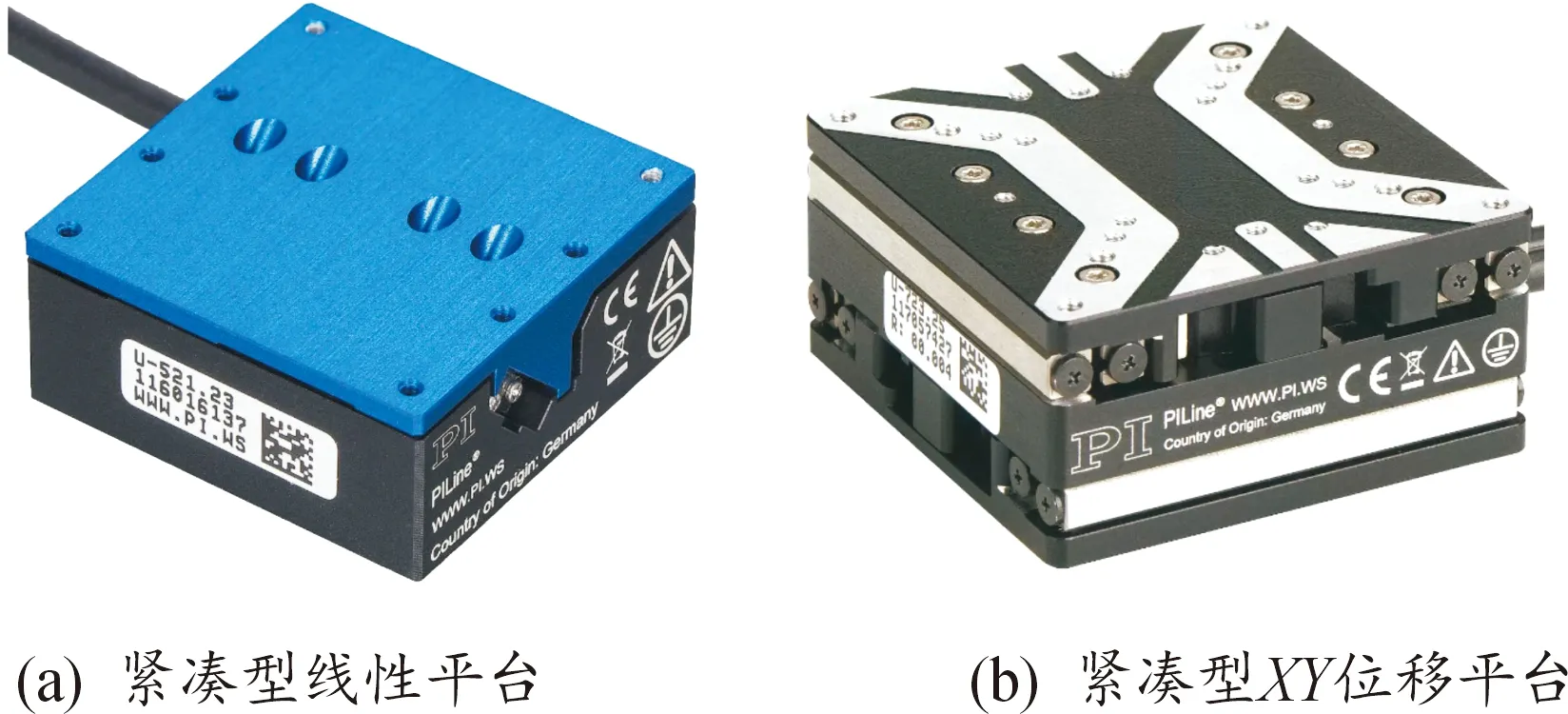
圖17 PI公司生產的超聲型壓電驅動器實物圖
國內也有很多企業投身于超聲型壓電驅動器的研究與制作,其中,上海虹漸光電科技有限公司的產品性能較好,該公司生產的XLS-1、XLS-3、XUMU超聲壓電線性平臺有非常不錯的輸出性能,其行程一般為10~25 mm,最大可達到300 mm,雙向定位精度達到±2.5 μm,最大負載可達5 N,速度范圍為200~1 000 mm/s。圖18為該公司生產的超聲型壓電致動器(圖片來源于公司官網)。
圖18 上海虹漸光電科技有限公司生產的超聲型壓電驅動器實物圖
綜上所述,超聲型壓電致動器的研究趨向于小型化和高輸出性能。目前,超聲型壓電致動器是利用壓電材料的高頻振動,使機械結構定子產生共振,但由于致動器定子的高頻震動,使得摩擦損失嚴重且發熱量大,影響電機使用壽命[64]。
4 粘滑型壓電致動器
4.1 粘滑型壓電致動器運動原理
粘滑型壓電致動器是利用摩擦力和慣性實現步進運動的,按照驅動力的來源,可分為摩擦驅動型和慣性驅動型。
4.1.1摩擦驅動型
摩擦驅動型是利用摩擦力驅動動子,驅動原理如圖19左側所示[65]。
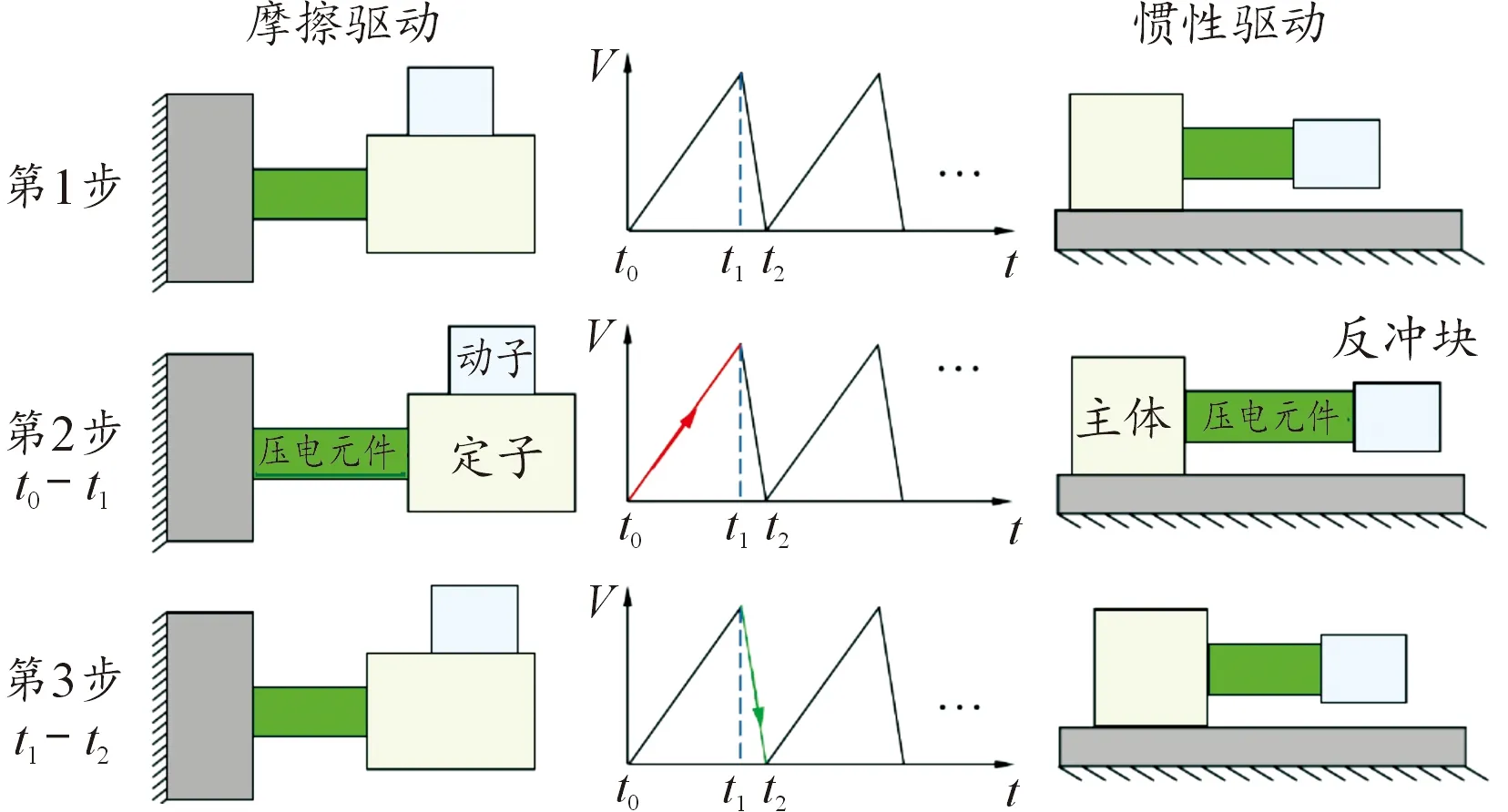
圖19 摩擦驅動與慣性驅動原理示意圖
整個裝置可分為壓電元件、定子、動子3部分,壓電元件一端固定,另一端與定子連接,動子與定子間形成摩擦副。壓電元件受電壓信號控制,常用的壓電信號為鋸齒波信號。摩擦驅動型壓電致動器的具體運動原理如下:
初始階段(t0階段):在沒有驅動電壓信號的情況下,壓電元件和被驅動的滑塊保持靜止;
“粘”階段(t0-t1階段):在一個緩慢上升的電信號作用下,壓電堆疊緩慢伸長,帶動摩擦桿移動,由于滑塊和摩擦桿之間存在靜摩擦力,所以摩擦桿會帶動滑塊同樣產生一個位移;
“滑”階段(t1-t2階段):電信號急速下降,壓電堆疊具有響應速度快的特點,立即發生快速的收縮,恢復原狀,由于慣性力的作用,滑塊并不會隨著摩擦桿運動,但是滑塊和摩擦桿之間存在滑動摩擦力,摩擦桿會帶動滑塊產生回退位移。
最終驅動信號降到0時,壓電元件縮回至初始狀態。
綜上所述,驅動信號一個周期會帶動滑塊產生一個步進運動,重復以上步驟,可以實現粘滑型壓電致動器在宏觀上的連續位移輸出,即使每一步的位移非常小,但多次重復,理論上的行程可以無限大。如果要使滑塊向相反的方向移動,驅動信號的形狀應該相反。
4.1.2慣性驅動型
慣性驅動型與摩擦驅動型稍有不同,其驅動原理如圖19右側所示[66]。慣性驅動裝置主要由主體、壓電元件、反沖塊3部分組成。壓電元件一端連接反沖塊,另一端連接主體,運動過程如下:
初始階段(t0階段):驅動電壓幅值為0,整個機械系統靜止;
“粘”階段(t0-t1階段):驅動電壓由0逐漸增加至峰值,壓電元件也隨電壓變化而逐漸伸長并將反沖塊推離主體,主體受到的推力小于與承載面的最大靜摩擦力,所以主體仍然保持不動;
“滑”階段(t1-t2階段):驅動電壓由峰值迅速降低至0,壓電元件則在電壓控制下快速縮短,同時拉近主體和反沖塊,若反沖塊的慣性力大于主體與承載面的最大靜摩擦力,則主體與承載面產生相對位移。
重復以上步驟,實現主體相對于地面的步進運動。在摩擦驅動型結構中,末端致動器的致動運動是由摩擦力產生的。在慣性驅動型結構中,末端致動器的致動運動是由慣性力產生的。
這2種驅動結構之間存在一些差異:
1) 由于最大靜摩擦力的限制,摩擦驅動型壓電粘滑驅動裝置的驅動力比慣性驅動型壓電粘滑驅動裝置的驅動力大;
2) 摩擦驅動型結構的分辨率取決于壓電元件和靜摩擦力。慣性驅動型結構中的分辨率取決于壓電元件和滑動摩擦力。但是,滑動摩擦力比靜摩擦力更復雜。在不應用控制算法的情況下,摩擦驅動型結構的定位精度高于慣性驅動型結構;
摩擦驅動型結構中的壓電粘滑致動器的行進距離受限于驅動對象的尺寸,而慣性驅動型結構中的壓電粘滑致動器的行進距離在理論上沒有限制,由于沖擊原理使壓電致動器具有精確運動的能力而受到重視,同時具有高分辨率、結構簡單、易于小型化和集成等特點。
4.2 研究現狀
第一代沖慣性驅動型壓電致動器由Hu等[67]在1987年首次提出,還介紹了沖擊驅動作動器定位系統的運動原理,制造了幾個原型,驗證了沖擊驅動運動原理的可行性[68-69]。此后,許多研究人員對沖擊驅動壓電致動器的發展表現出了濃厚的興趣。
Mazeika等[25]研制了一種新型的小尺寸線性壓電慣性摩擦致動器,如圖20所示。
此壓電致動器設計簡單,由4個矩形雙晶片壓電板固定在2個金屬支架上,通過2個彈簧連接。致動器的激勵可以通過單鋸齒或矩形脈沖信號來實現。對壓電作動器進行了數值研究,分析了作動器的固有頻率、模態形狀和對不同激勵信號的響應。驅動電壓為40 V時,滑塊的最大空載速度達到40.376 mm/s,驅動電壓相同時,致動器的最大推力達到0.21 N。
不過,一種能同時調節驅動力和摩擦力的慣性沖擊壓電致動器的具體結構至今未被提出。也就是說,驅動力和摩擦力對這種致動器輸出性能的協同作用在理論上還不清楚,其工作機理尚不明確。目前迫切需要提出一種同時調整驅動力和摩擦力的控制策略,從全局角度優化慣性沖擊壓電陶瓷致動器的輸出性能。
Wen等[26]提出了一種角度可調的慣性沖擊壓電致動器,其結構如圖21所示,它具有一對角度可調的振子,此裝置可以同時調整驅動力和摩擦力的控制策略,從全局角度優化慣性沖擊壓電陶瓷致動器的輸出性能。
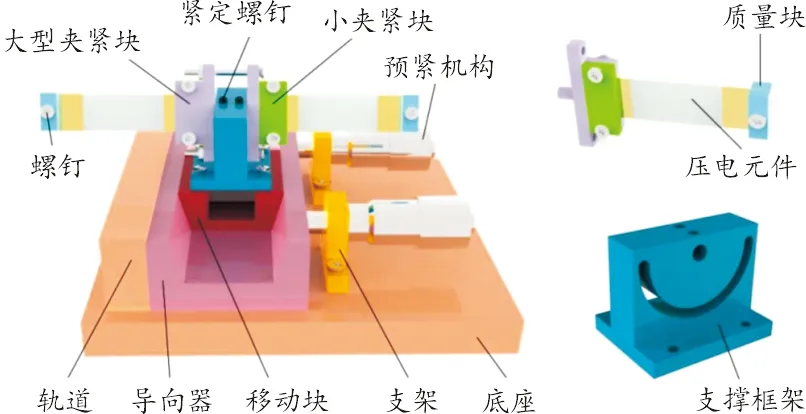
圖21 慣性沖擊壓電作動器的結構示意圖
通過實驗結果可得,在傾角為60°,驅動電壓為10 V時,致動器分辨率為0.24 μm,由于其輸出性能優異,被廣泛應用于精密制造領域。在驅動電壓為90 V,傾角為75°的條件下,慣性沖擊壓電致動器最大速度為15.54 μm/s。該團隊為了尋找新的摩擦控制方法,提出了一種利用電磁鐵控制磁流變液的剪切力直接調節摩擦力的方法,研制了一種由兩端固定梁非對稱結構,以及由電磁鐵控制的磁流變液摩擦調節單元組成的壓電致動器,其執行機構如圖22所示[27]。采用Matlab/Simulink和COMSOL對壓電陶瓷致動器進行了模態分析和動力學分析。通過樣機試驗,驗證了電磁控制磁流變液用于摩擦調節的可行性。該致動器采用電磁控制磁流變液單元,無回退運動。在25 V、7 Hz的方波激勵信號下,磁場為19.5 mT時,最小步進位移為0.1,回退率為0.92;磁場為8.4 mT時,最大步進位移為2.53,回退率為0。
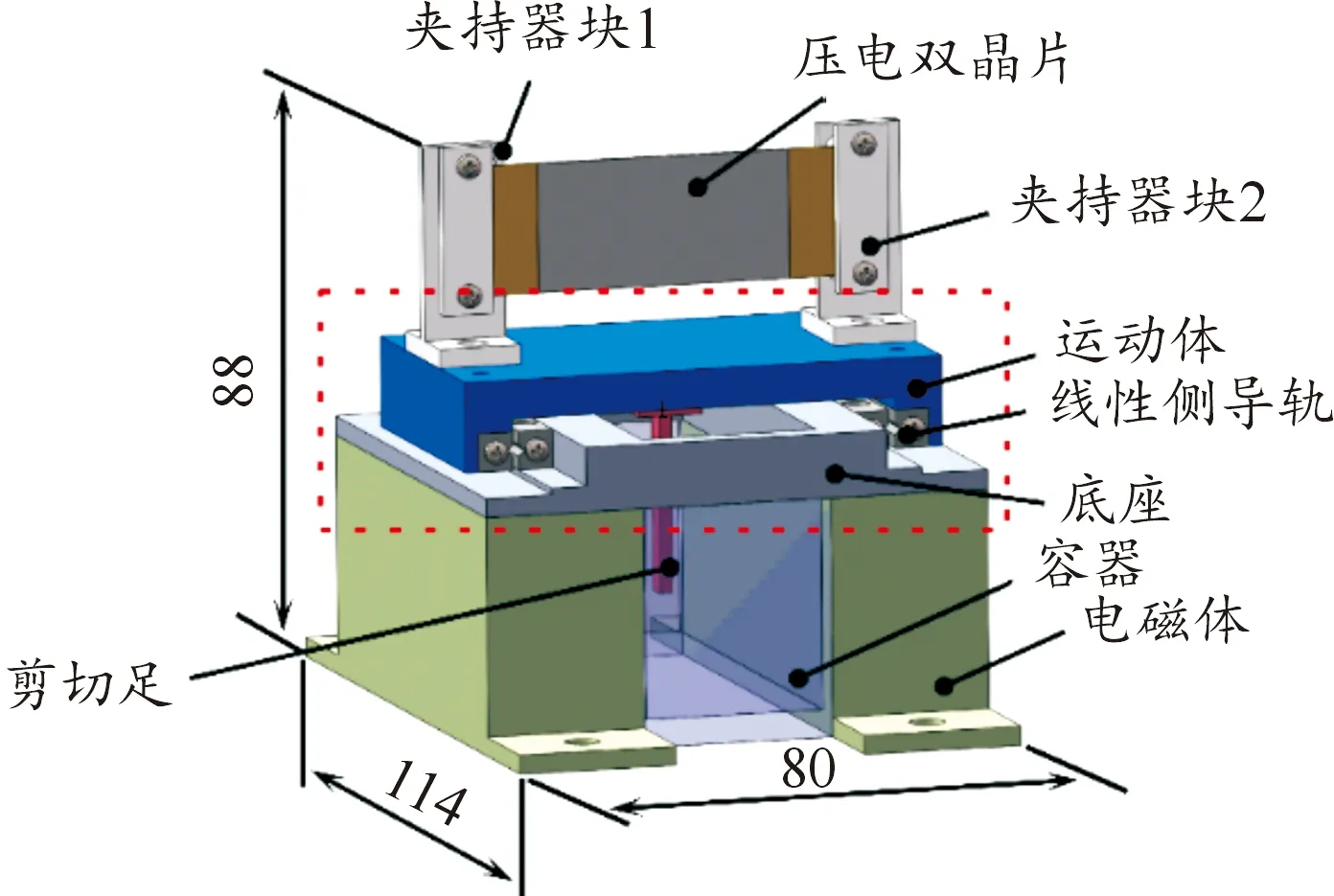
圖22 電磁控制磁流變液執行機構示意圖
需要注意的是,由于在快速收縮階段,慣性力應大于摩擦力,慣性塊的質量必須大到足以產生慣性力。此外,沖擊力對整個系統產生不穩定的振動,這也限制了沖擊驅動壓電作動器的廣泛應用。為了克服此問題,Higuchi等[70]首次闡述了粘滑致動器的工作過程和基本構成,該致動器是由沖擊驅動致動器改進的。此后,粘滑型壓電致動器因其結構簡單、控制系統簡單等優點,受到了國內外研究者的廣泛關注。世界上首個粘滑型壓電驅動裝置的研究是Pohl等[71]在西班牙的第一屆國際掃描隧道顯微學學術會議上發表的。近年來,壓電粘滑驅動裝置的研究主要致力于解決機械結構優化、驅動原理改進、摩擦性能調控及驅動波形優化等問題[72]。
王吉如[28]在寄生慣性驅動方法的基礎上,提出了通過放大壓電堆疊位移提升性能的粘滑型驅動方法,研制了位移增幅型壓電驅動裝置,其結構如圖23所示。該結構設計了將橋式柔性機構和杠桿柔性機構串聯的新型柔性機構,疊加了位移放大能力。通過對驅動裝置樣機進行試驗測試,得到在電壓幅值為100 V,頻率為1 Hz的條件下,該裝置的垂直負載上限為3.6 kg。驅動裝置最高速度為18.08 mm/s,水平負載能力為120 g。Qiu等[29]提出了一種新的協同補償方法(CCM),補償粘滑致動器的回退運動,可提高速度,如圖24所示,該裝置的驅動信號如圖25所示。通過分析實驗結果可得,此方法能有效地提高粘滑致動器的步長,特別是在低頻驅動下,當驅動信號的頻率為10 Hz時,帶有CCM的致動器的步長是傳統單驅動方法的29倍以上,在驅動信號頻率為250 Hz時,此方法的最大步長為4.448 μm,超過傳統方法步長的48%。該裝置需要進一步研究前饋控制器與協同補償相結合的方法,以獲得更好的穩定性和可重復性。
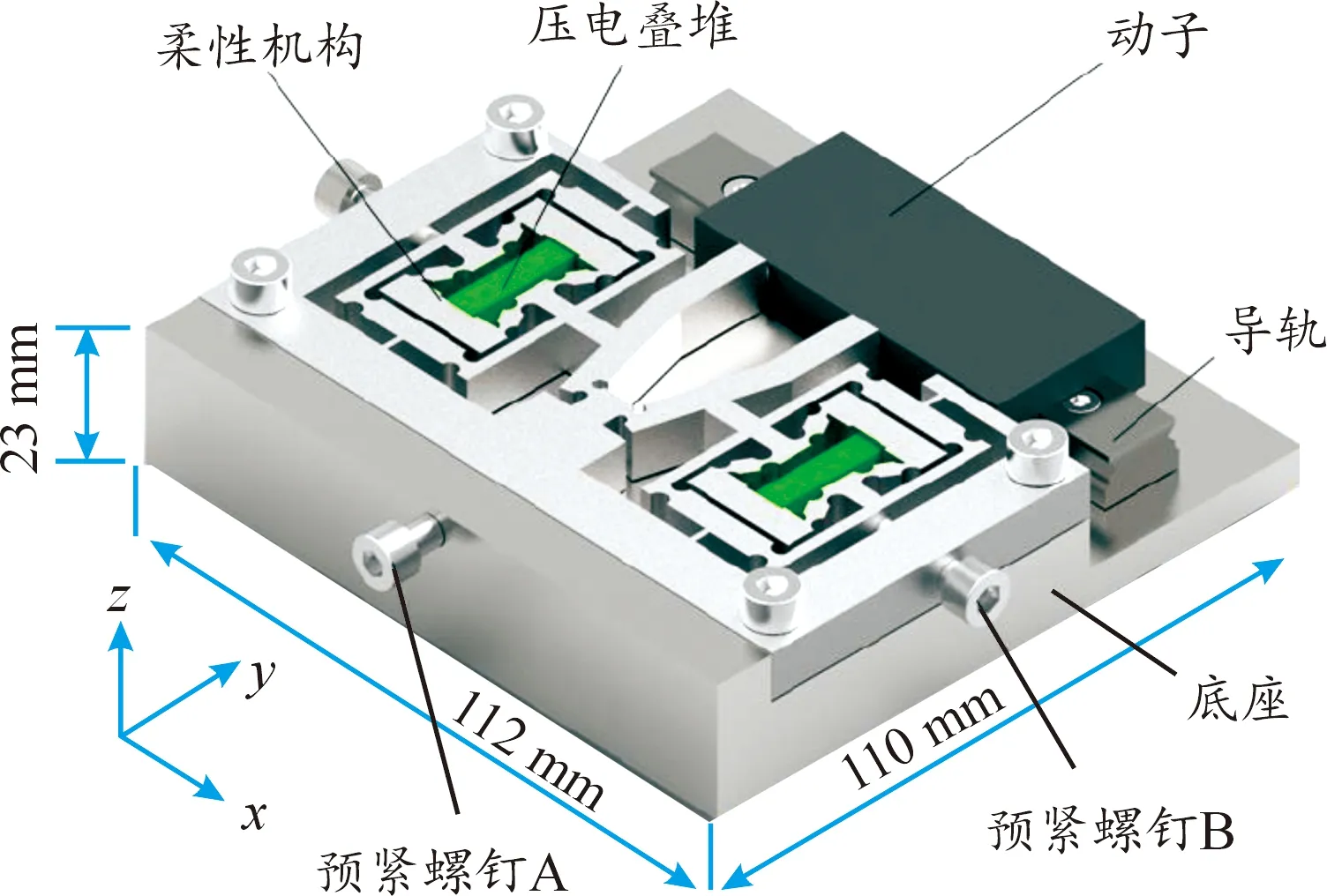
圖23 位移增幅型驅動裝置
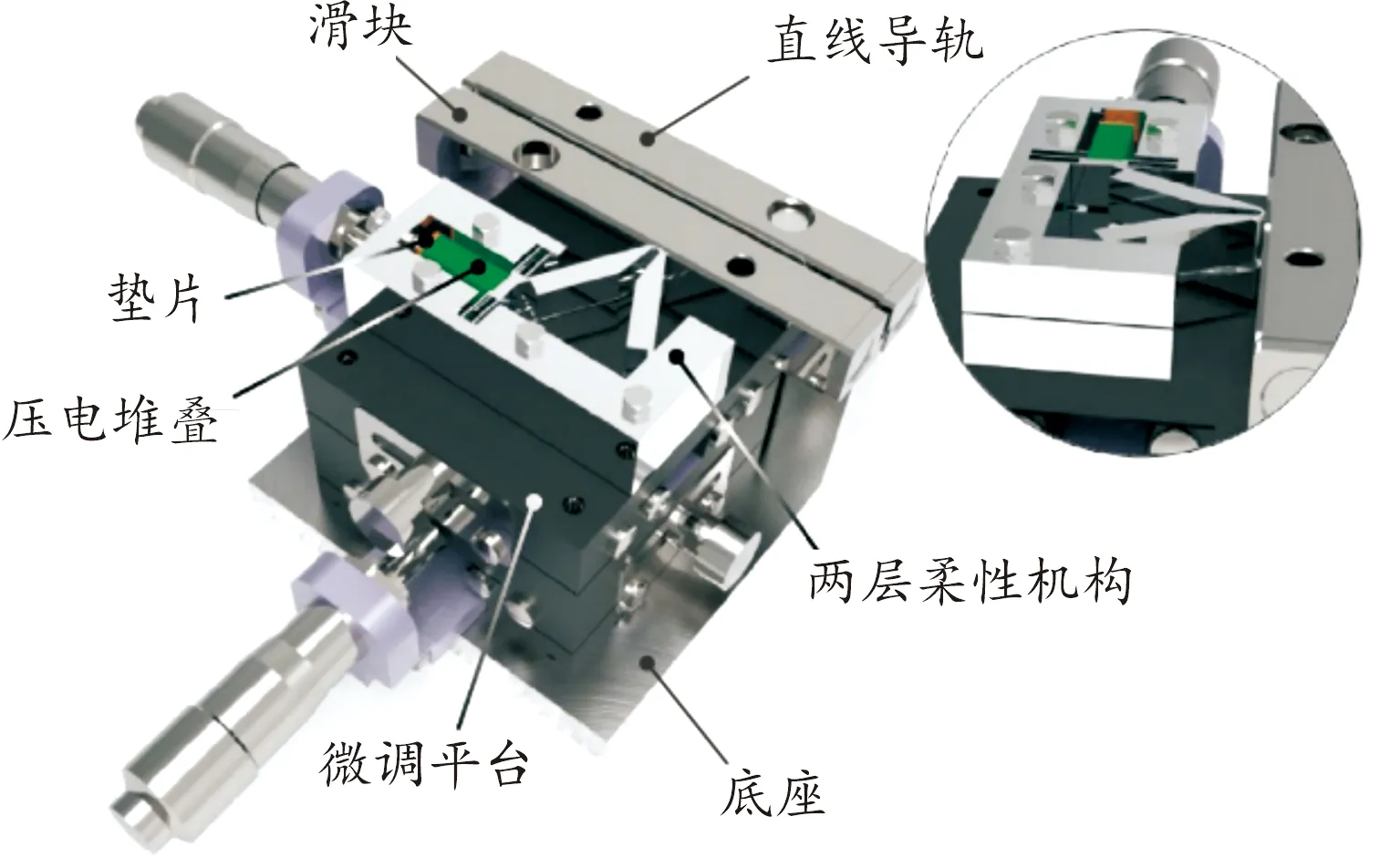
圖24 粘滑致動器三維圖
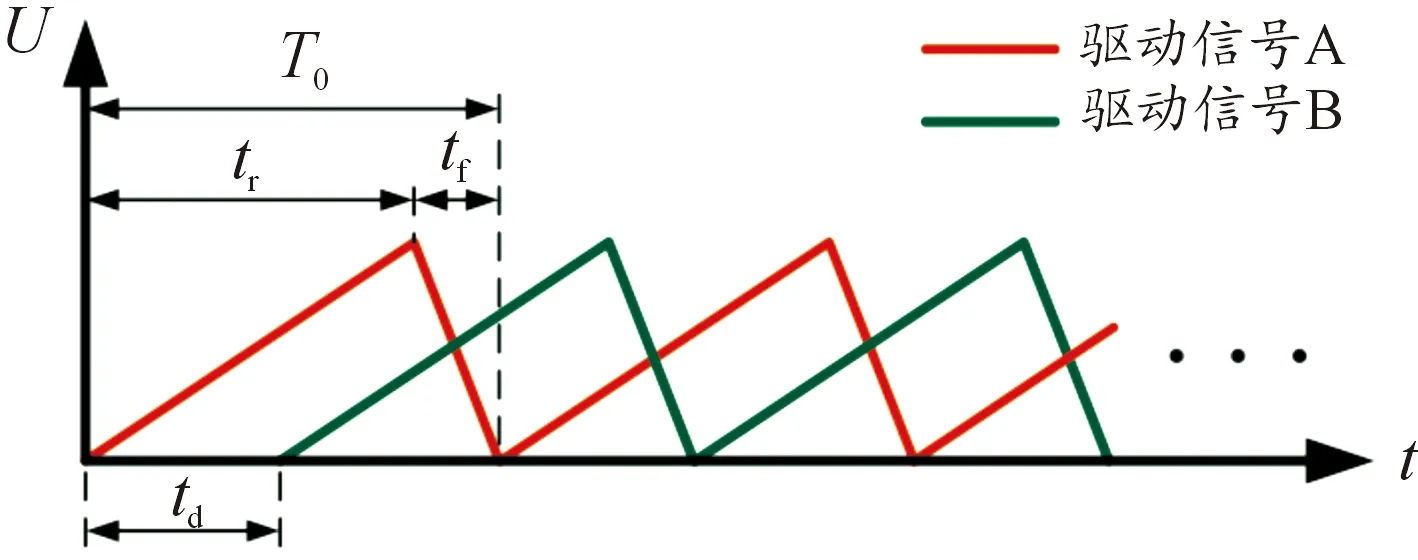
圖25 協同補償方法的鋸齒波驅動信號曲線
粘滑型壓電致動器是一種具有理論上可達到無限行程和納米級高定位分辨率的新型壓電致動器,但面臨低負載能力的挑戰,這限制了它的應用領域。Zhang等[30]提出了一種通過共享驅動足的方法,其結構如圖26所示,基本思想是采用2個壓電元件和一個共用的驅動足,向前或向后驅動,并且兩者都涉及在“粘”運動階段的夾緊動作和在“滑”運動階段的釋放動作,從而可以在2個驅動方向上實現大的驅動力/負載能力。通過實驗結果驗證了該方法的有效性,在100 V、1 kHz的鋸齒波電壓下,樣機空載前進和后退速度分別高達18.6 mm/s和 16 mm/s,2個驅動方向的負載能力均大于2 kg,向前和向后的驅動速度分別為1.8 mm/s和 0.6 mm/s。Shi等[31]提出了一種結構緊湊、可實現往復運動的新型直線型粘滑致動器,其結構如圖27所示。
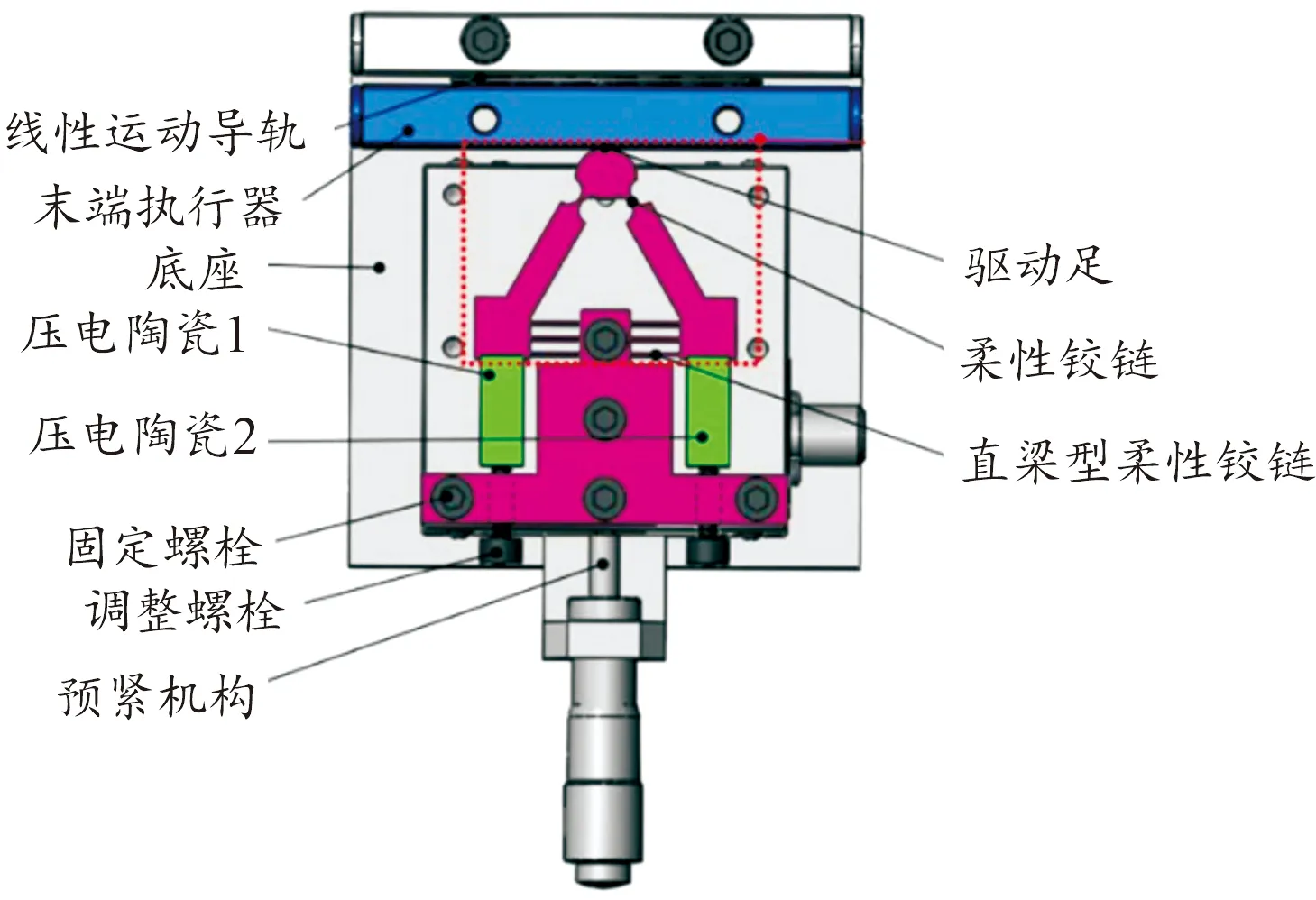
圖26 共享驅動足型粘滑驅動平臺結構示意圖
此裝置采用新型對稱結構菱形位移放大機構產生橫向運動,提高了致動器的性能。此外,還提出了一種2個驅動足共同作用的新型驅動方法,可以提高作動器的負載能力。通過實驗結果表明,驅動機構前后運動的最大速度分別為428.5、443.2 μm/s。與單足驅動方法相比,采用新的驅動方法后,致動器的承載能力由1.2 N提高到1.6 N。最后,利用該致動器搭建了一個微定位工作臺,實驗結果表明該工作臺工作穩定。現有的粘滑驅動平臺在重載的情況下很難實現平穩的運動,限制了輸出性能。為了實現在載荷作用下的平滑運動,Ding等[32]提出了一種采用交替步進法的粘滑致動器,如圖28所示。2個驅動足協同推動滑塊通過一個壓電堆疊。試驗結果表明,此次的粘滑型壓電致動器具有極高的適應性,所設計的致動器在空載和水平載荷條件下具有良好的平滑性,最大速度和分辨率分別為24.42 mm/s、0.80 μm。
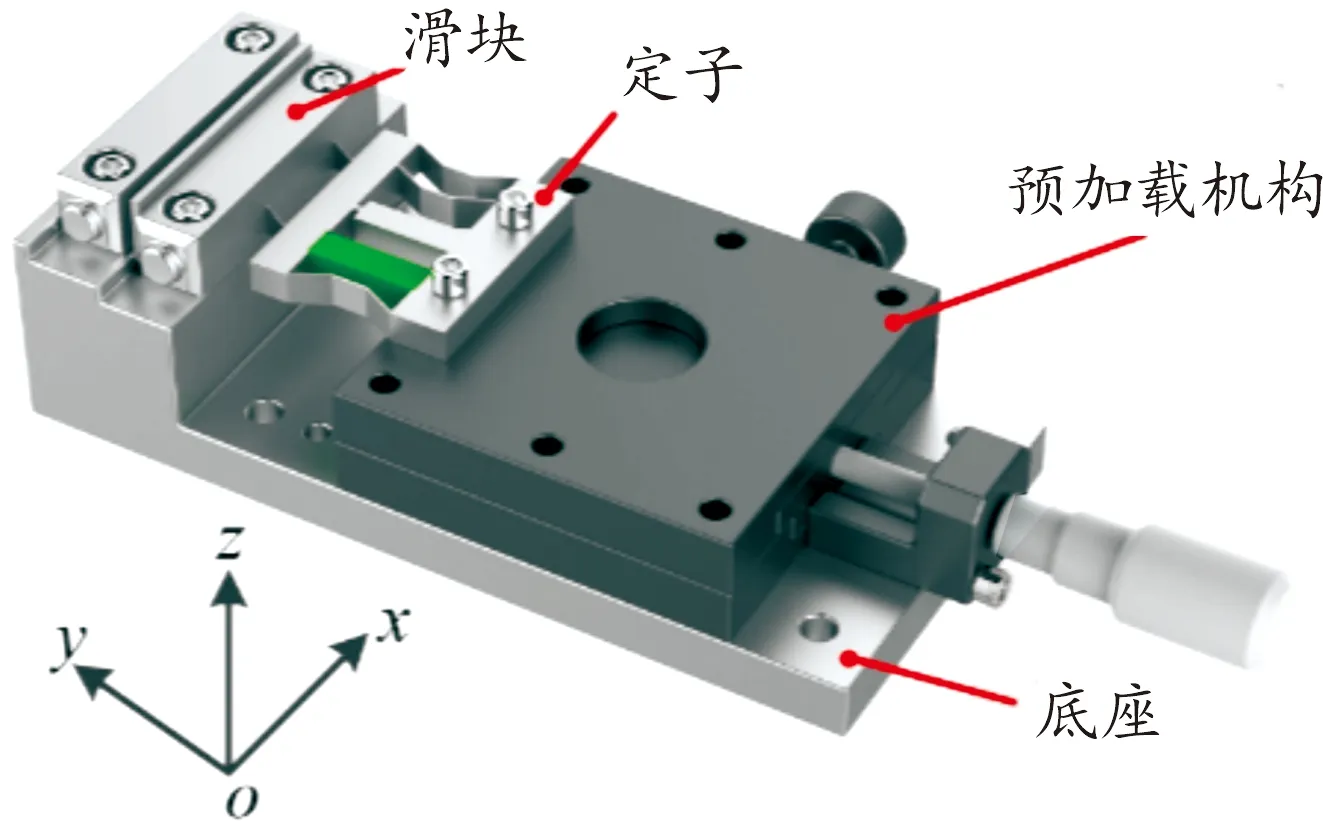
圖28 交替步進法的粘滑致動器
近些年,隨著粘滑驅動裝置在微/納定位行業的興起,國內研發與制作粘滑型壓電驅動裝置的公司如雨后春筍般涌現出來,如哈爾濱芯明天科技有限公司、阿米精控科技(山東)有限公司等。其中,阿米精控科技(山東)有限公司生產的一維長行程納米促動器如圖29所示,該產品具有10 mm~數百毫米的超大行程;重復定位精度小于5 nm;運動速度可達10 mm/s;保持力可達8 N,具有很好的穩定性。此外,該公司也生產二維、三維長行程納米促動器(圖片來源于公司官網)[76]。
圖29 阿米精控科技有限公司生產的一維納米致動器實物圖
德國的Physik Instrumente(PI)公司生產的線性平臺,其行程范圍為12~32 mm,速度為6~8 mm/s,驅動力一般為7 N,定位精度為納米級。圖30為PI公司生產的Q-545 Q-Motion?精密線性平臺。
粘滑型壓電致動器的運動可分為“粘”運動階段和“滑”運動階段,當前壓電粘滑驅動技術的相關研究主要從新構型、新方法等方面開展[65-66],其結構簡單、易于封裝,同時理論上可實現毫米級輸出行程及納米級定位精度的跨尺度驅動,但由于其驅動原理所造成的位移回退,使致動器存在大行程、高精度與高負載等難以同時兼顧的問題;因結構限制少數通過多驅動單元實現摩擦力綜合調控以減小位移回退量的致動器,難以實現雙向驅動設計,從而制約了壓電粘滑致動器的進一步發展與應用[73-74]。
5 對比與展望
基于以上綜述,表1總結出了3種步進型壓電驅動平臺的性能比較。可以明顯看出,尺蠖型壓電致動器具有較高的定位精度和較大的輸出能力,但是運動速度相對較低且控制方法復雜;粘滑型壓電致動器具有相對較均衡的性能,結構簡單緊湊、輸出力較高,并且可實現大工作行程。融入仿生設計后,粘滑壓電致動器的結構更具多樣性,滿足了許多特定需求。但是達到大行程的同時,粘滑壓電致動器的速度和分辨率等輸出特性又會受到影響。因此,還需要進一步研究高性能的大行程粘滑壓電致動器。
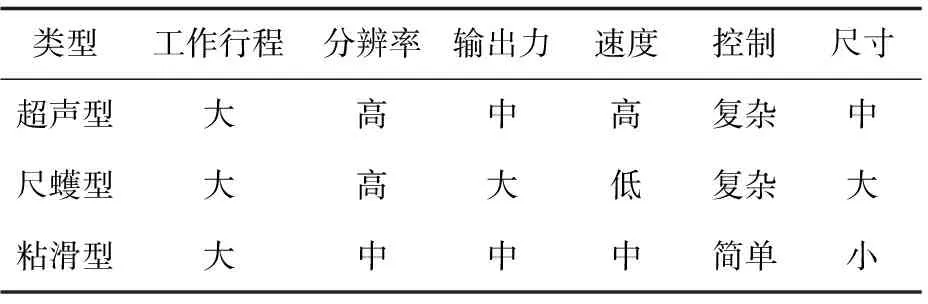
表1 各類型步進壓電致動器的輸出性能對比
在前人對步進式壓電致動器研究的基礎上,對步進式壓電致動器的運動原理和性能進行了分析。但要克服這3種類型壓電致動器存在的問題[75],增強其實際應用,還需進一步研究:
1) 與其他2種類型的步進型壓電致動器相比,尺蠖型壓電致動器雖然可以實現相對較高的負載,但是其結構與控制方法比較復雜。在以后的研究過程中應探索通過設計巧妙的柔性機構或新穎的制造方法來進一步簡化其結構。
2) 雖然超聲型壓電致動器的輸出性能比其他2種步進型壓電致動器好,但是其控制方法比較復雜,應該探索更簡單有效的法,簡化其控制難度,并且動子與定子之間是通過摩擦傳遞動力,會影響其使用壽命,這也是在以后研究過程中需要解決的問題。
3) 雖然粘滑型壓電致動器的結構和控制相對簡單,但是承載能力較低,并且由于運動原理,步進運動中普遍存在回退運動。因此,提高其承載能力和抑制后移的研究還有待深入。
由于壓電致動器應用與微/納米定位系統中,所以以上3種致動器的結構要盡量緊湊,尺寸要盡可能小,而且需要對控制系統進行改進,以獲取更良好的輸出性能。
6 結束語
1) 本文綜述了步進型壓電致動器的研究現狀,重點介紹了3種類型的步進型壓電致動器(尺蠖型、超聲型、粘滑型),與其他類型的壓電致動器相比,步進型壓電致動器不僅可以實現較大的工作行程,而且可以獲得較高的定位精度。
2) 對這3種步進式壓電致動器的工作原理與研究現狀進行了闡述與討論,將國內外商用產品的輸出性能進行了對比,國內相關產品的輸出性能與國外公司的產品有一定差距,但性價比高。
3) 對以后的發展進行了展望。尺蠖型壓電致動器要向更簡單的結構與控制方向發展;超聲型壓電致動器要改善摩擦帶來的影響,提高使用壽命;粘滑型壓電致動器對提高承載能力以及抑制后退的方法還需要進一步研究。目前的步進型壓電致動器仍需改善其輸出性能并滿足實際應用中不斷變化的要求。