無人機LiDAR 技術在山區鐵路測繪中的應用
2023-10-14 05:41:22張占忠
鐵道勘察 2023年5期
關鍵詞:測繪
張占忠
(中鐵第一勘察設計院集團有限公司,西安 710043)
引言
西部地區的鐵路大多地處高寒、高海拔、高落差、地質活躍地帶,鐵路建設將要面臨更復雜嚴酷的工程環境,不僅是對人員和設備的挑戰,更是對勘察技術的考驗。 為了滿足極復雜工程環境的勘察需求,各項測繪技術、勘測設備需要進行有針對性的研發與創新[1]。 其中,鐵路勘測涉及眾多工程專業,其中包括測繪工程、遙感科學與技術、地理空間信息工程等專業,隨著科學技術發展,這些專業技術也發展迅猛,其工作流程、技術方法、技術標準、產品內容等也隨之變化。
無人機技術具有高機動性、數據可靠性高、觀測誤差分布均勻且精度高等技術優勢,成為現代勘察領域主要外業數據采集及判識的主要手段之一[1-2],眾多學者對其進行深入研究。 馮威針對地質不良構造判別難的問題,提出一種基于無人機的勘察遙感方法,實現了地層巖性、地質構造、不良地質等地質要素的準確判識[3];周福軍采用多旋翼無人機飛行平臺搭載傾斜攝影相機獲取的影像數據,建立巖體結構定量計算、分析統計方法,實現巖體結構信息從人工定性量測到計算機定量提取的技術轉變[4];杜世回基于無人機激光雷達數據,實現了植被覆蓋度高等隱蔽地區的滑坡、危巖落石等不良地質解譯識別及高陡邊坡巖體結構幾何信息的定量提取[5]。 以上研究各有側重點,但都偏重于地質勘察領域,并未針對大高差復雜高原環境下的測繪產品的生產做出系統的技術總結,且在測繪數據獲取、測繪產品制作流程、精度分析等方面研究較少。
針對復雜高原環境下高精度測繪數據產品的獲取,提出一種基于無人機LiDAR 技術的詳細生產作業技術規程方法,以分別應對大高差、高坡度、植被覆蓋、精度控制難、數據精度穩定性差等復雜場景[6-8]。 并形成了相關試驗研究成果,以期能在一定程度上促進復雜山區鐵路測繪技術的發展。
1 工程概況
西部某山區鐵路,海拔分布范圍為3 000 ~4 200 m, 前期采用高分辨率衛星影像測制了1 ∶2 000 比例地形圖。 隨著鐵路建設的推進,亟需進行詳細的線路研究資料,然而由于地形陡峻、高差大、交通困難,現場技術人員難以到達勘測現場。 通過測區綜合環境分析,若使用有人機搭載LiDAR 設備進行測繪作業,存在成本高、人員安全無法保障的問題,而采用固定翼無人機方案由于工作區域場地狹窄的限制,無可用起降場地,另外使用傳統的無人機作業模式又無法滿足設計指標要求。 因此,決定使用旋翼無人機LiDAR 開展相關測試研究,并分別在技術路線及方案、無人機平臺設備選型、數據獲取、數據處理、測繪成果生產等無人機測繪全流程方面進行試驗、歸納、分析與總結,最大限度地挖掘利用無人機潛在價值,開拓并完善在復雜高原地區的技術應用場景。
2 技術路線
對項目所處位置進行全方位分析,明確了測區測繪范圍、海拔高度、高程落差、自然坡度及地表附屬物等情況;對適合該地區作業的無人機與LiDAR 設備進行選型分析,制定合理的航攝飛行方案;然后進行航跡計算,激光點云融合、激光點云數據濾波處理,最終制作出符合相關規范精度要求的數字地面模型、數字正射影像、數字線劃圖、線路橫縱斷面等基礎測繪成果。其詳細技術路線見圖1。
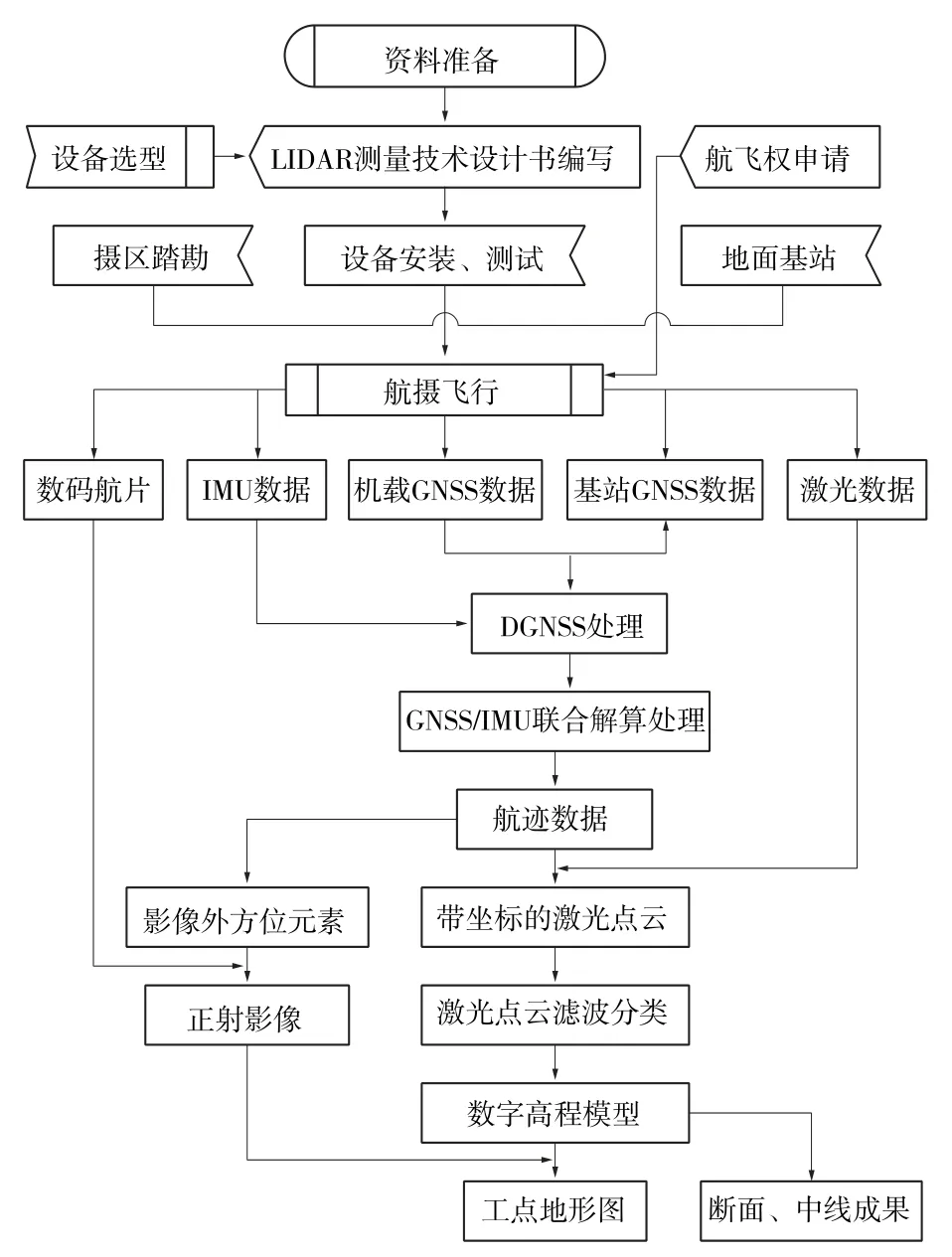
圖1 無人機LiDAR 測繪技術路線
3 無人機LiDAR 飛行平臺及設備選型
3.1 無人機飛行平臺
由于高原地區氣壓低、高寒、氣流強,嚴重影響無人機系統的穩定性,無人機飛行過程中面臨電池掉電加速、發動機功率下降、載荷能力降低、攀升動力不足等問題,因此無人機選型與載荷裝備極為重要。 項目作業區大部分海拔在3 000 ~4 200 m 之間,飛行相對高差在600~800 m 之間,自然坡度均在50°左右,地形陡峻,峽谷風向多變,影響飛行安全性,無人機飛行平臺必須滿足飛行高度在5 000 m 以上,電池需滿足有效作業時間大于20 min,無人機荷載要大于5 kN,要有高原槳葉,能滿足-20 ℃低溫下工作條件,抗風能力要大于5 級,并支持仿地飛行控制接口[9]。 基于此指標對國內外無人機產品比對,并經現場試飛測試,確定國產科衛泰KWT-X6L-15 六旋翼無人機作為本次工作任務的飛行平臺,飛行平臺參數信息見表1。
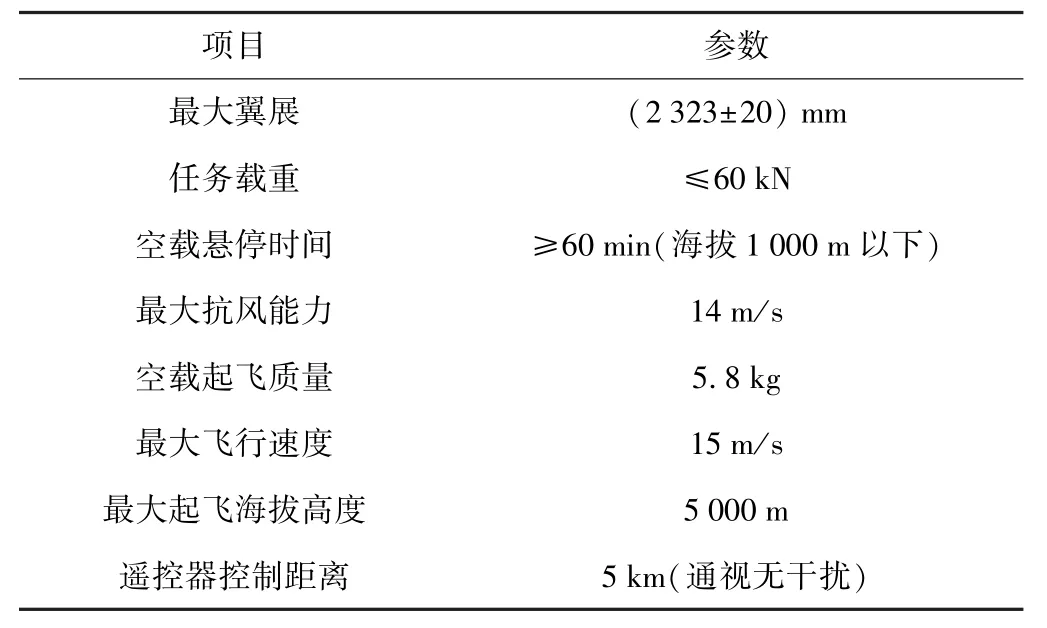
表1 無人機平臺詳細參數
3.2 LiDAR 設備類型
根據作業區域地形地貌、植被覆蓋度等特點,激光雷達測量設備主要考慮的性能指標有:具有較高的有效長測距能力,光束發散角度優于0.5 mrad,角度分辨率優于0.001°,以保障光束具有足夠的植被穿透力;具有多次回波能力,以獲取真實地面信息;具有高精度且穩定可靠的GNSS/IMU 慣導系統,水平絕對中誤差優于5 cm,高程絕對中誤差優于5 cm;要想高效獲取高密度點云數據,即需要具有較小的掃描分辨率與較高的掃描頻率,以及多次回波能力。 通過對國內外現有輕型LiDAR 設備比對,經現場數據采集檢驗,確定采用國產華測AS-1300HL 輕型激光雷達測量系統作為本次工作的激光點云數據獲取設備。
4 數據獲取
4.1 飛行計劃制定
為了滿足1 ∶500 比例測繪精度的要求,需盡量獲取測區內密度均勻的激光點,提出利用既有DEM 數據進行仿地飛行任務規劃(見圖2)。 通過既有的1 ∶10 000 比例地形圖制作出數字地面模型,導入到遙控器進行各個工作區的飛行任務規劃,依照地形起伏設置航線空間走向與分區情況。 考慮到激光掃描儀的視場角度遠大于普通航攝相機,航線覆蓋范圍的決策以影像地面分辨率為主,飛行航帶設計兼顧影像采集指標,并確保在仿地基準面上地面分辨率差異控制在±25%偏差之內。
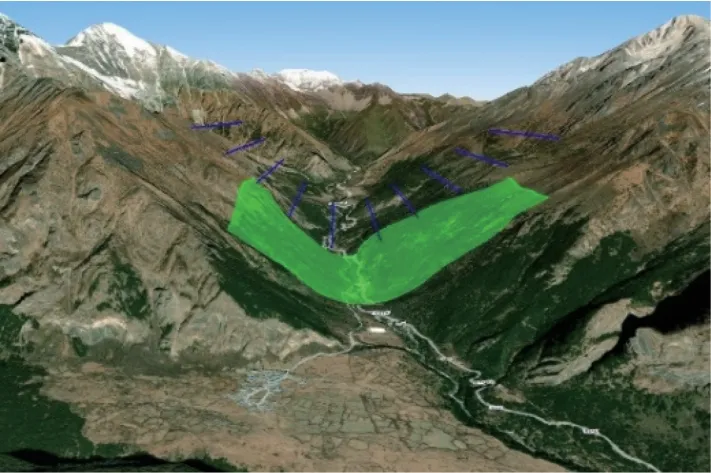
圖2 仿地飛行航線設計
4.2 外業實施
在航攝飛行提前30 min 架設好地面基站,并在作業之前進行設備自檢、定位精度檢核。 由于針對高原復雜山區已經建立了星基、地基北斗高精度CORS 服務網絡,依靠北斗混合星座組網及多頻點的特點,彌補了傳統導航系統在復雜山區存在定位精度粗差大、抗遮擋能力差的問題[10-11]。 因此,AS-1300HL 設備航跡解算需要北斗導航衛星支持,地面基站架設盡量要能支持北斗衛星的接收機,否則后續軌跡解算會降低精度。 另外,針對大高差、大坡度地形,需要提升有效航向、旁向的重疊區至80%、60%[12],以保障相鄰像對重疊區域內的有效地面分辨率差異小,又能獲取更多的地面激光點云數據。 綜上,本次作業設計飛行相對航高為300 m,激光掃描頻率設定為400 kHz,無人機飛行速度設計為30 km/h,由此計算出點密度為22點/m2,共設計航線130 條,飛行測線78 km,選擇了測區天氣狀況良好且光照充足的8 個工作日時間段,共飛行25 個架次完成測區激光雷達掃描數據及航攝影像數據的獲取。 采集了勘測人員無法到達的設計線路隧道口、高陡邊坡等區域激光點云與數碼影像數據,填補了測區地形復雜地段范圍無高精度測繪數據的空白。 無人機LiDAR 數據采集現場環境見圖3。

圖3 外業數據采集
5 數據處理
數據處理包含激光點云數據與影像數據的處理。激光點云數據的處理一般包括原始數據預處理和后處理2 個步驟。 航攝外業獲取的原始數據主要包含GNSS 數據、IMU 數據、時間數據、激光距離測量值、各影像波段等的記錄值等。 激光點云的數據預處理需要將原始采集數據進行聯合處理得到激光點的三維坐標值,主要包含航跡解算、點云配準、融合等步驟;航攝影像數據的處理主要為空中三角測量解算、正射影像的生成等;激光點云數據后處理就是對融合之后的點云數據進行地物濾波分類,得益于多次回波特性,將落在地形表面上的點與非地形表面上的點(樹木、植被、高壓鐵塔、建筑物)進行有效分離[13-14],最后將這些數據用于后續的大比例數字高程模型、地形圖制作、斷面及中樁坐標的提取。
5.1 航跡解算
從原始點云數據中解算分離移動站的GNSS 數據,IMU 數據,然后在Inertial Explorer8.7(IE)軟件中對分離出的組合導航數據進行差分、融合、平滑處理,最后輸出所需要的POS 航跡數據[15]。 IE 解算后,在無失鎖情況下精度指標達到位置精度:平面坐標應優于0.05 m,高程精度應優于0.08 m;姿態精度:Roll 及Pitch 應優于18″,Heading 應優于90″[16]。
5.2 數據預處理
激光點云數據預處理主要包含如下步驟:點云融合、初步濾波、原始數據格式轉換、點云精處理等,分別在CoPre、CoRefine 軟件完成。 在CoPre 軟件中加載激光原始數據(*. rxp)、航跡文件(*. PosT)及設備的標定參數(*.EP),設置系統相關的檢校參數,將其轉換為LAS 點云通用格式。 因掃描角設置較大,會引起設備遮擋及云霧等產生噪點信息,需在點云航帶間匹配后將掃描角110°以外的點云數據進行手動刪除。LAS 格式的激光點云數據的坐標系統按照CGCS2000 橢球TM 投影標準3°分帶成果進行處理,為進一步提高航線匹配精度,在CoRefine 軟件中進行點云航帶間的姿態和位置糾正,輸出最終的LAS 格式點云數據,在TerraSolid 軟件中采用距離測區最近的初測控制網點兩套坐標(WGS84 平面坐標+橢球高;CGCS2000 平面坐標+海拔高)轉換LAS 點云數據坐標系統為工程獨立坐標,坐標轉換精度要求平面、高程≤0.1 m。 激光點云質量檢查主要包含以下3 點[16-17]。
(1)激光點云數據覆蓋范圍、相對漏洞、絕對漏洞檢查,重疊度檢查。
(2)點密度及均勻度檢查,點密度達到規范要求(平均點密度≥16 點/m2)。
(3)航帶高程較差檢查、平面較差檢查,本項目地形等級為Ⅳ級,按照相關規范(一般控制在0.15 m 以內,大于0.15 m 時,返回重新解算)。
無人機影像數據預處理采用ContextCapture 軟件進行處理,其正射產品成果見圖4。
5.3 數據后處理
(1)激光點云自動分類
本項目處于西南高山區河谷地帶,植被覆蓋度高且地形陡峭,采用目前的主流點云數據處理軟件TerraSolid 提取地面點,首先在TerraSolid 軟件中編寫適合測區地形條件的宏命令,根據試驗,在處理地形起伏較大的山區地形時宏命令編寫中,迭代角度應適當增大,本項目設置為15°;距離迭代應根據點云密度確定,本項目設置為1 m;其他參數也應設置恰當。 由于真實場景的復雜多樣性,使用通用的參數設置模式存在泛化能力差的問題,精度與效果不能保障,因此采用多種參數組合控制實驗,對地面點云自動濾波進行預處理,以找出最優的濾波參數,實現有效先驗知識限制性濾波。
(2)激光點云精細分類
精細分類處理主要目的是提高分類的精度,剔除自動分類的粗差點,其中包括錯分成地面點、植被、低點等的噪點,以及由于測區環境復雜(分類參數無法顧及所有地形、地貌與地物分布)導致的山脊、山溝、山頂、陡坎、懸崖等漏分錯分情況[18-20]。 在手工精細分類環節質量控制措施如下。
①采用航攝數碼影像紋理信息輔助對點云進行判識分類[21-22]。
②采用將點云按分類顯示、高程顯示等方法,查看有無異常,對有疑問的地方人工用斷面圖進行檢查和分析。
③地面點一般采用建立切片渲染模型的方法檢查,可繪制出不連續、不光滑處的斷面圖進行詳查,并參考快速正射影像等數據輔助檢查地面點分類的可靠性。
④大面積點云選取剖面,查看有無未剔除的噪點。
最終的精細處理后的點云數據成果見圖5。

圖5 精細處理地面點云渲染
(3)精度評定
地面點分類完成后,按照飛行區域為工程單位,分別提取模型關鍵點并輸出,并將模型關鍵點(*. las)導入TerraSolid,重新構建數字地面模型,在能開展外業測量區域,采用外業實測中樁點進行點云數據精度評定,誤差統計分別見圖6、表2。

表2 Lidar 點云數據與外業實測中樁高程差值對比
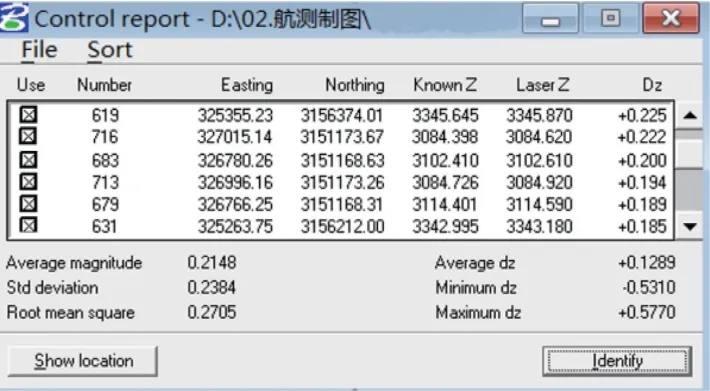
圖6 實測中樁與分類后點云數據精度報告
項目參與檢查的野外實測的中樁高程檢查點共197 個,點位分布在溝底、陡坎邊、山脊、密林地區等特征點區域,經檢查,測區的高程中誤差為0.271 m,最大高程較差為0.577 m。 對高程較差大于0.5 m 的點進行分析,發現該區域植被覆蓋度高,能夠到達地面上的激光點云較少,另外有些地形特征點(比如陡坎、溝底)缺少地面點,也會造成該區域的精度受損失,但該區域的整體精度按照誤差分配原則均能滿足1 ∶500 比例航空攝影測量相關規范精度指標要求。
6 測繪成果生產
6.1 1 ∶500 比例地形圖
在TerraSolid 軟件中用,最終提取的激光點云精細地面點及模型關鍵點點云數據創建數字地面模型,由于山區場景中存在大量的復雜地形特性,還需通過半自動輔助地形特征重建,此時可獲取高精度的可量測的數字地面模型數據;接著結合正射影像及立體影像數字化地物,把河流、建筑物、道路等地理要素按比例尺繪制,同時標注高程點;然后根據地形信息、地物屬性信息自動創建等高線圖層;由于存在測繪其他復雜約束、經驗與語義約束,導致自動生成的地形數據存在扭曲、壓蓋等問題,最后在dlgmate2021 地形圖編輯軟件中進行圖形編輯、整飾得到1 ∶500 比例地形圖。
6.2 線路橫縱斷面
根據鐵路中線及斷面里程,按斷面的要求寬度,在TerraSolid 軟件中,通過設置斷面節點距離、變坡點位置,軟件經過自動依節點與地形數據求交獲取高程信息,完成橫斷面的提取工作;根據線路中線中樁樁號及平面坐標,基于地面點構建數字高程模型并內插出每個中樁點的高程坐標作為最終的縱斷面成果。
7 結論
(1)將仿地飛行大載荷無人機長距離LiDAR 技術作為一種新型低空航空攝影測量手段,其搭載方式靈活,受天氣影響小、數據生產周期短、激光點能穿透植被,具有多次回波、精度高等優勢,在植被覆蓋度高、地形陡峻的高原山區鐵路勘測中發揮了重要作用,能夠為該類型鐵路高精度地形測繪、橫縱斷面測量提供一種新的手段。
(2)在高海拔山區,需選擇續航時間長、GNSS/慣導精度可靠、長測距激光掃描儀的無人機LiDAR 平臺,在落差較大地區,為獲取點密度均勻的激光點云數據,通過仿地飛行航線設計,可獲取作業現場的高精確測繪成果。
(3)通過本次工作獲取了高原復雜山區無人機LiDAR 平臺的各項性能指標,包括起降電池電壓臨界值、飛行時間、激光點密度、基站架設距離、提高POS解算精度措施、地形陡峻區域激光點云提取參數設置等關鍵指標,探索針對高海拔、艱險復雜地形、高寒缺氧等特殊環境下的無人機LiDAR 測繪技術應用方案與操作標準流程,可為在類似地區開展相關測繪工作提供技術借鑒。
猜你喜歡
城市勘測(2023年5期)2023-11-03 01:32:36
經緯天地(2021年5期)2021-12-27 02:32:28
浙江國土資源(2019年10期)2019-10-31 03:17:00
建材發展導向(2019年10期)2019-08-24 06:25:28
江西建材(2018年4期)2018-04-10 12:37:38
中國公共安全(2017年7期)2017-10-13 08:18:11
電子制作(2017年9期)2017-04-17 03:01:00
衛星與網絡(2015年5期)2015-12-20 09:07:37
衛星與網絡(2015年12期)2015-10-27 02:21:46
河南科技(2014年1期)2014-02-27 14:04:09